
Abstract
Dynamic uncertainties and unknown disturbances will degrade the tracking performance of robots. When using a disturber observer-based controller, the key to effectively compensate for these uncertainties is to measure or estimate as accurately as possible any disturbance. To relax restrictions on the design of the current nonlinear disturbance observer for the robot, a universal nonlinear disturbance observer is proposed for higher estimation performance. The stability of the proposed universal nonlinear disturbance observer is theoretically analyzed and the boundaries of estimation error are proven according to the vector differential equation. Finally, the proposed universal nonlinear disturbance observer is evaluated via simulation by comparison to the nonlinear disturbance observer. The result shows a faster estimation speed and a higher estimation accuracy of the universal nonlinear disturbance observer.
Keywords
Introduction
The serial robot manipulator is required to perform efficiently in sophisticated and repetitive tasks such as assembling, drilling, and peg-in-hole task. To achieve those functions, the robot manipulators are required to follow the desired trajectories accurately and rapidly. Furthermore, to achieve the high precision and high efficiency of robot manipulators, it is necessary to introduce robotic dynamics into the controller. This has the result of reducing the effect of robotic nonlinear dynamic characteristics. The dynamics of the robotic manipulator has been covered by many textbooks. 1 –3 However, it is difficult to build an accurate dynamic model for the robot because strong nonlinearities, system coupling, practical uncertainties, and existing disturbances complicate the modeling process. For example, the structure of the friction model is difficult to confirm when the robot operates various tasks, let alone confirm the actual parameter values. 1 –4 Therefore, it remains an outstanding and difficult problem to build the dynamics of robots with uncertainties present.
To address the system modeling uncertainty and disturbance, varieties of advanced control strategies are proposed for the robotic systems. Inspired by Slotine and Li 5 which guarantees the stability of the robot with the dynamic parameters of robot and payload estimated while online, Arteaga-Pérez et al. 6 proposed an adaptive control scheme for a space robot. This was achieved through substituting the computed torque PD controller with online estimated dynamic parameters. Furthermore, Wang 7 and Goodwin and Sin 8 similarly achieved the adaption of the manipulator by a combination of a new dynamic controller and an online estimation strategy. However, these adaptive control algorithms mainly address parameter uncertainties, not the complicated unknown external disturbance and unmodeled nonlinearity, which are typically unable to be efficiently described by using any current online estimator. Sliding mode control (SMC) is an attractive robust control method and is used to address the issue of disturbances and uncertainties. Sometimes the introduced sign function or the discontinuous high-frequency switching input used to solve the issue of disturbance and uncertainties may cause the undesirable chattering effect, which is detrimental to the tracking performance of the robot and possibly harmful to the mechanical system. 9 To reduce the chattering effect for the robot manipulator, a type of terminal SMC was designed for fast convergence of continuous finite-time control in Cruz-Ortiz et al. 10 and Shao et al. 11 Furthermore, Shao et al. 11 and Zhai and Li 12 designed a second-order algorithm named super-twisting algorithm which is continuous and does not have the chattering issue because they introduce the sign function into a second-order derivative of the sliding surface vector, making it integral. In some circumstances, the multi-joint serial robot may suffer complicated disturbances and the controller design is based on the boundaries of the disturbance. Since it is difficult to determine the appropriate boundary for both unknown disturbance and the key variable for the controller design, some of the SMC methods analyzed and designed by using the Lyapunov theory are conservative, which may not easily obtain the desired tracking performance of the robot. Typically, the state of the system is able to converge to the neighborhoods of the equilibrium points while the other characteristics of the system are usually unconcerned. Additionally, many papers have been devoted to combining neural networks and adaptive control strategy or SMC to cope with uncertainties and disturbance 13 –17 It normally requires a large amount of data to train the model while the unknown external disturbances may change irregularly, which can increase the difficulties of training. Additionally, owing to a possible lack of generalization, some of the works may have more difficulty achieving the desired performance of robotic systems in a short time frame.
An alternative to the approaches detailed above is to attenuate or eliminate the disturbance and unmodeled dynamics through a feedforward strategy based on the disturbance observer. The procedure is to gather all the disturbances and uncertainties into a single disturbance term, and then an observer is designed to estimate this lumped item to generate the corresponding compensation in the controller. Disturbance feedforward compensation is created to be an add-on to an existing feedback controller, such as computed torque control (CTC). And it is unnecessary to change the controller, which may be presently used. If the lumped unknown disturbance item can be accurately estimated, then the sum of the built-in dynamic model and the lumped unknown disturbance can reflect the real system model objectively. The disturbance-based controller is probably easier to show a better performance than the above controllers because the actual dynamic of the system can be compensated by the feedforward loop more accurately. Since accurate acceleration is normally unavailable in robotic systems, Chen initially proposed a type of nonlinear disturbance observer (NDO) for a two-link manipulator that was subject to unknown constant disturbance by using Lyapunov theory, without utilizing acceleration information
18
–20
Although it shows a promising result, the designed observer is suitable for a class of two-link manipulators with a special inertia matrix. To extend the number of degrees of freedom into n, a more general NDO based on a linear matrix inequality (LMI) is proposed by Mohammadi
21
–23
Nevertheless, the predefined condition that the product of the observer gain matrix and inertia matrix is constant matrix, inevitably restricts the options of observer gain in applications. And the above drawbacks continue in the following literature,
24
–28
until
29,30
which modify the structure of the NDO to relax the restriction of the observer gain. However, the observer gain in Qiao et al.
29
is a constant for easier analysis by Lyapunov theory, rather than a more general matrix. In Huo et al.,
30
the observer is modified for a single-joint system in which acceleration is measurable. Nevertheless, the disturbance is much easier to be estimated in a single-joint system when the acceleration can be obtained. To overcome the above deficiencies of NDO, a universal nonlinear disturbance observer (UNDO) is proposed by introducing an item in NDO to relax the restriction of the observer gain matrix for higher performance. The main contributions are listed as follows: The estimation performance of the NDO is restricted by the multiplication of the observer gain matrix and inertia matrix as a constant matrix. This article modifies the structure of NDO by introducing a key item to relax restrictions and provide more options on the observer gain matrix, which determines the transient and steady-state characteristics of the observer. Our observer gain can be extended into any positive definite matrix to maintain the stability of the observer. Additionally, we can easily obtain the desired behavior of the observer through designing the observer gain matrix. Consequently, UNDO is much easier to show a better estimate performance than the current NDO. Different from the above literature in which the design and stability analysis of the observer is finished by using Lyapunov theory, this article proves the boundary of disturbance estimation error according to its vector differential equation and analyzes the performance of the observer through transfer function. As a result of these processes, several meaningful results are discovered. For example, a new boundary of the estimation error is proven and the static characteristic is known for the first time.
This article is organized as follows: In the second section, the current typical NDO is reviewed, and then UNDO is proposed by a modification. The stability of the observer and the boundary of disturbance estimation error are proven. Simulation results on a two-link robotic manipulator are given in the third section. Finally, the conclusion is presented in the last section.
Dynamics of the robot and UNDO design
Dynamic model of the robot
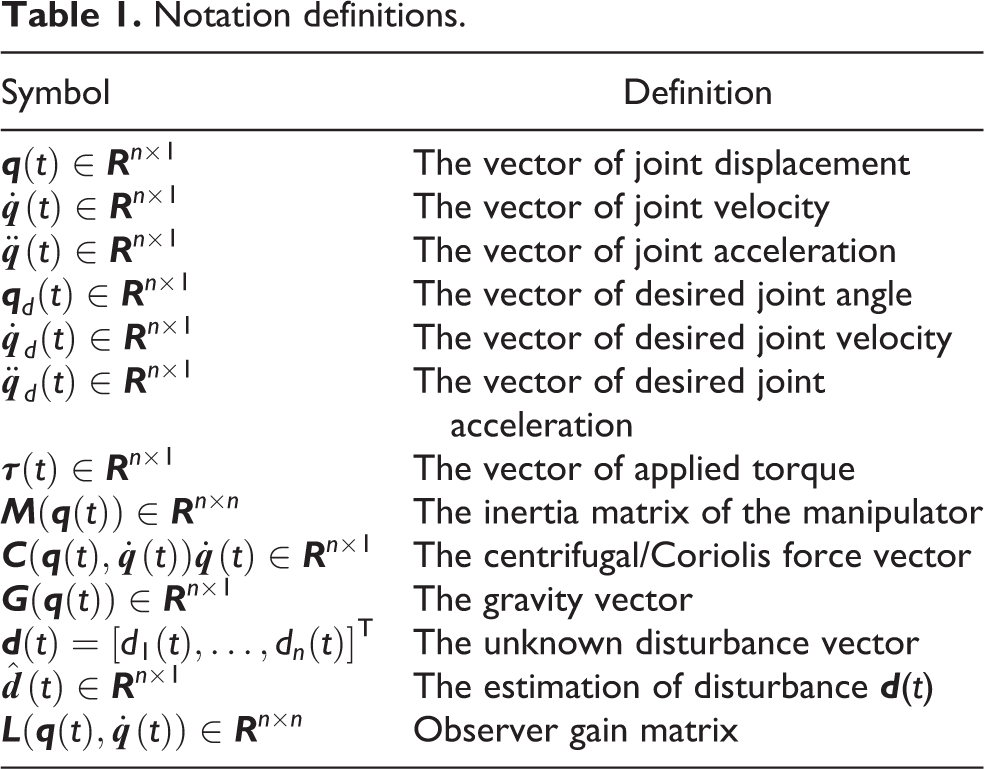
Some symbols are defined in Table 1.
Notation definitions.
The dynamics of an n-DOF rigid serial robot is given by Chen et al. 19 as follows

where
UNDO design
To illustrate the motivation and innovation of this article, the current typical NDO is reviewed in this section. The principle of observer design lies in the change of estimation according to the difference between the estimated disturbance and actual value. A DO for the manipulator is proposed as

However, the accurate acceleration of the joint vector


However, equations (3) and (4) are normally not equivalent to equation (2). To ensure they are equivalent, Li et al. 18 and Chen et al. 19,20 designed the NDO for a double-joint serial robotic manipulator under the condition that

where c is a constant. Further, to extend the application range of the observer into the n-links robotic manipulator, Mohammadi and Dallali 21 and Mohammadi et al. 22,23 design the LMI-based NDO by modifying equation (5) into

where

where

under the condition that
However, the predefined condition that

And then the case of

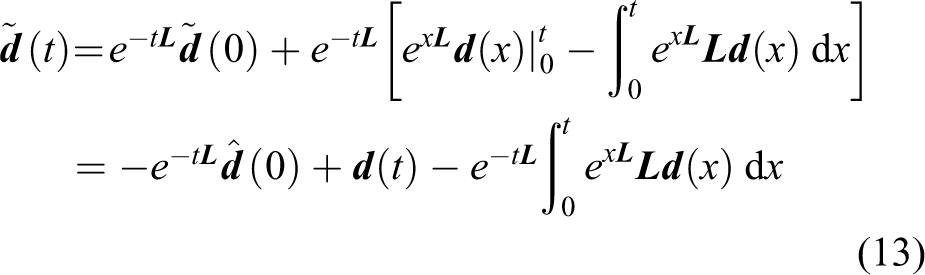
The solution of equation (10) is solved as

where
The stability of the UNDO is presented in the following lemma. To simplify the proof for the following lemma, we assume all the elements in
Lemma 1
Suppose that a robotic system subject to disturbances is described by equation (1) and the derivative of the disturbance is bounded, that is,
Proof
From equation (10) or (11), we know that the estimator is stable when

On the other hand, sometimes the velocity of the disturbance may increase into a very large value, while the value of the disturbance remains relatively small. As a consequence, the calculated upper boundary of disturbance estimation error according to equation (12) is much larger than the actual value, and it may not be useful in applications. To that end, this article demonstrates another upper boundary for the disturbance estimation error.
From equation (11), we can obtain
and then we can have

The ultimate boundary of disturbance estimation error is decided by a smaller boundary between equations (12) and (14). Then we can conclude

This completes the proof for (1) of Lemma 1.
From equation (11), we have

From equation (13), we can obtain

Then we can conclude

This completes the proof for (2) of Lemma 1.
The above analysis for Lemma 1 also implies that the estimation accuracy of the disturbance observer (9) is improved by increasing the values of observer gains li
(i = 1,…, n) when we choose
Up to now, the current work mainly focuses on the stability or the boundary of estimation error. However, it is difficult to draw further conclusions directly from the differential equation of estimation error. To this end, the relationship between the disturbance and its estimation is analyzed in this article. The transfer function between the disturbance and its estimation can be obtained as follows

where

The observer will be stable when

Equation (21) implies that this observer will exhibit no steady-state errors in response to step input disturbance, finite steady-state errors in response to ramp input disturbance, and infinite errors to acceleration and higher order input disturbance.
31
And we can design the root of the characteristic polynomial and the behavior of the observer by designing
Simulations
Example 1
Sometimes it is difficult to determine the friction model in practice. One natural idea is that we may regard friction as part of an unknown disturbance, when the friction model is difficult to build or the inaccurately built friction model might be far removed from the actual model. And then the observer is used to estimate the disturbance for the observer-based controller design.
In this simulation, the proposed UNDO is tested on a two-link robotic manipulator to estimate the unknown disturbance in MATLAB. Disturbance feedforward compensation is used as an add-on to an existing feedback controller. The CTC is a well known and one of the simplest dynamic control method in the robot, and it is covered by many textbooks. 1 To focus on the study of effectiveness of our observer, the CTC is designed by the compensation of the estimated disturbance. The simulation results of a computed torque control with the UNDO and that of an NDO are compared.
Consider a two-link robotic manipulator shown in Figure 1, and the numerical values of the parameters are cited from Slotine and Li 5 and listed in Table 2.
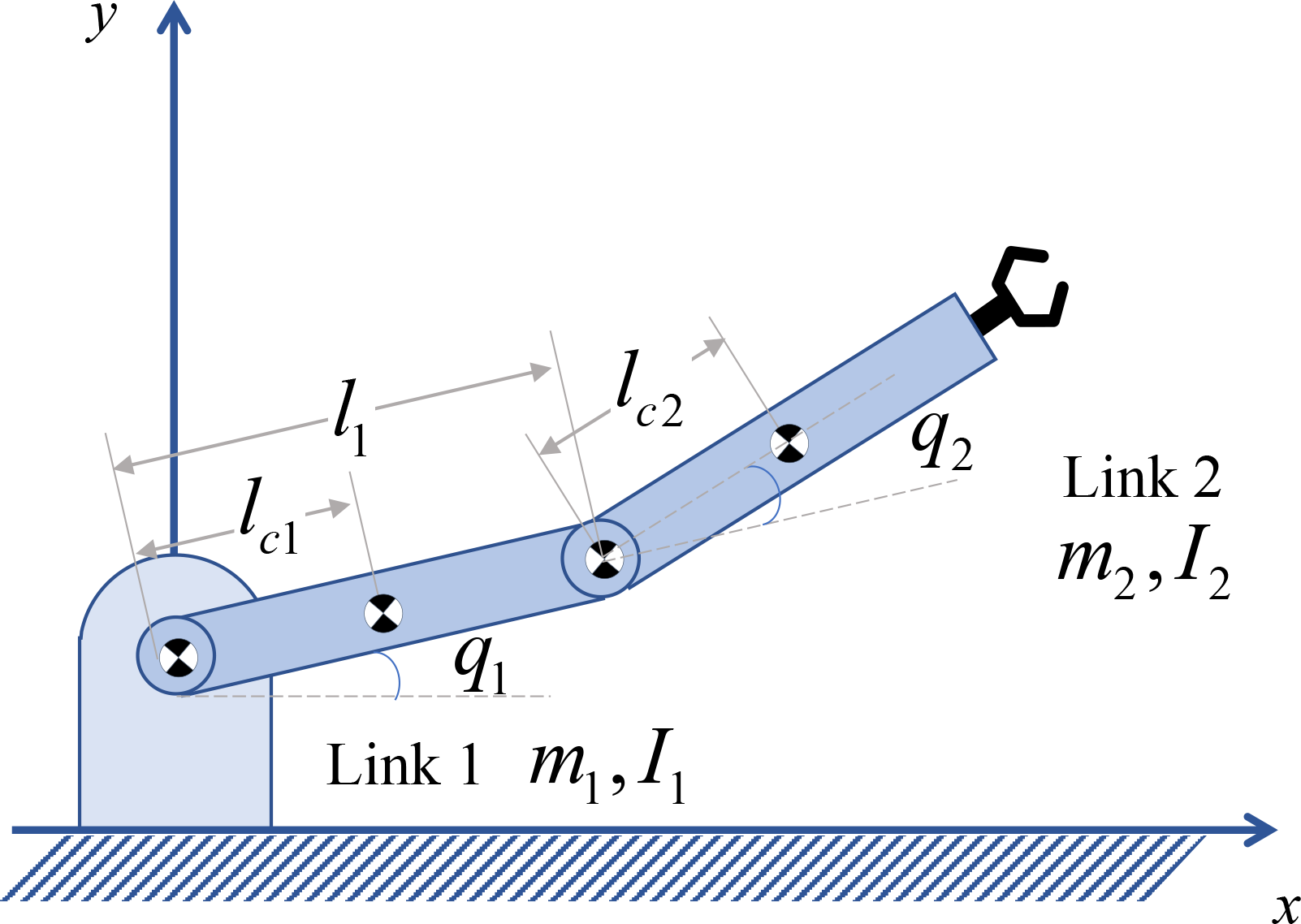
Schematic diagram of a two-link robotic manipulator.
The parameters of the robotic manipulator.a

a The first link has four parameters: mass m 1, the distance of center mass to the first joint lc 1, the length of link l 1, and moment of inertia I 1; the second link has three parameters: mass m 2, the distance of centroid to the second joint lc 2, and the moment of inertia I2.
The dynamic equation of a robotic manipulator can be described by

where



The desired joint trajectories are chosen as

We regarded the Stribeck friction model as a part of the unknown disturbance to study the effectiveness of UNDO. The unknown external forces and uniform white noise are introduced to increase the difficulty for the observer. The unknown disturbance is chosen as

where Fc
1 = 0.2, Fm
1 = 0.7, and a
1 = 20 denote the coefficients of Coulomb friction of the first joint, and Fc
2 = 0.3, Fm
2 = 0.8, and a
2 = 14 denote the coefficients of Coulomb friction of the second joint;
To make an impartial comparison between the effect of the proposed UNDO and that of NDO, we should choose an identical controller for the robot. For the sake of fairness, we choose an identical controller as

The controller parameters are chosen as

Diagram of UNDO-based CTC controller. UNDO: universal nonlinear disturbance observer.
The proposed UNDO is easily designed and spends a short time to find the proper observer gain for UNDO in several trials since its principle can be founded in equations (19) to (21) which is a guide for our design process. The observer gain matrix of UNDO is chosen as
In comparison, it is difficult to design NDO in Mohammadi et al.,
23
and it consumes a lot of time to adjust the observer parameters. Furthermore, the disturbance estimation performance is consistently low using any means. From equations (22) and (23), we have

According to the study by Mohammadi et al.,
23
the key to design the NDO is to solve LMI (26). There is only one matrix of the observer to be adjusted by us, that is,
The disturbance and its estimation are shown in Figure 3. The positional tracking performance of the robot is shown in Figure 4. The angular velocity tracking performance of the robot is shown in Figure 5. The torques are shown in Figure 6.

Disturbance and its estimation. (a) Disturbance and its estimation of two joints. (b) The partial enlargement of joint 1 disturbance estimation. (c) The partial enlargement of joint 2 disturbance estimation.
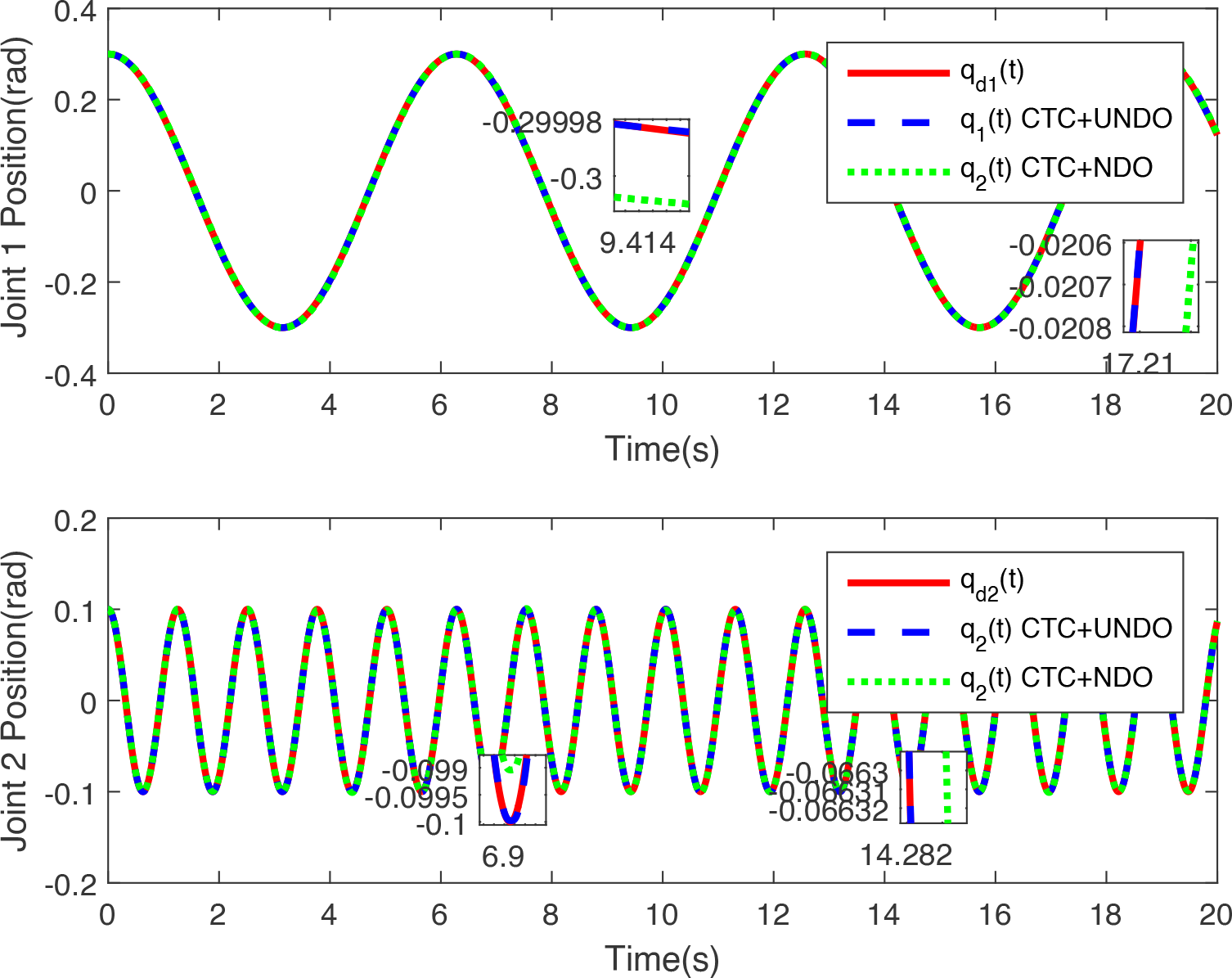
Positional tracking performance of the robot.

Angular velocity tracking performance of the robot.
Applied torques.
Figure 3 shows that the output of UNDO matches the disturbance closer than that of NDO, and we can conclude the estimation performance of UNDO is better than NDO in both convergent speed and precision. The UNDO can even estimate the uniform white noise in this example. Moreover, the design of UNDO is much easier than that of NDO.
In Figures 4 and 5, there is no obvious difference between the tracking performance of the robot controlled by NDO-based controller and that of a UNDO-based controller. Therefore, the drawings of partial enlargement are added in Figures 4 and 5 to show the differences between the tracking performance of the robotic system controlled by both observer-based controllers. The tracking error of the robot controlled by CTC + UNDO is smaller than that controlled by CTC + NDO. Therefore tracking performance of CTC + UNDO is superior.
To show the superior performance of the proposed UNDO, the UNDO is tested with a more difficult task in Example 2. The centrifugal/Coriolis force, gravity, friction, and modeling uncertainties are treated as the unknown disturbance.
Example 2
The actual dynamic equation of the robotic manipulator is considered the same one as Example 1. To increase the difficulty of estimation for the UNDO, the centrifugal/Coriolis force and gravity are treated as part of an unknown disturbance. Moreover, the dynamic parameters are known to be inaccurate and the estimated dynamic parameters are assumed to be
In addition, the existence of the payload is assumed to be unknown in the design process of the observer. The mass of the payload is mp = 1 kg, and the distance of centroid of the payload to the second joint is lp = 1.2 m. The payload at the end effector is taken into account as an unknown disturbance. The schematic diagram of a robot with an unknown payload at the end effector is shown in Figure 7.

Schematic diagram of a two-link robotic manipulator with an unknown payload.
Then the actual model can be described by

where

represents the inaccurately built inertia matrix. The disappeared items of the dynamics are considered unknown and are included into the unknown disturbance as follows

which needs to be estimated. Since

which represents the part of unknown disturbance caused by the unknown payload at the end effector. Therefore, the unknown disturbance
Figure 8 shows the diagram of the UNDO-based controller when

Diagram of UNDO-based controller when the centrifugal/Coriolis force
The UNDO is designed as

where
The controller is chosen as the following observer-based controller:

The chosen parameters of the controller
The trajectory is chosen as

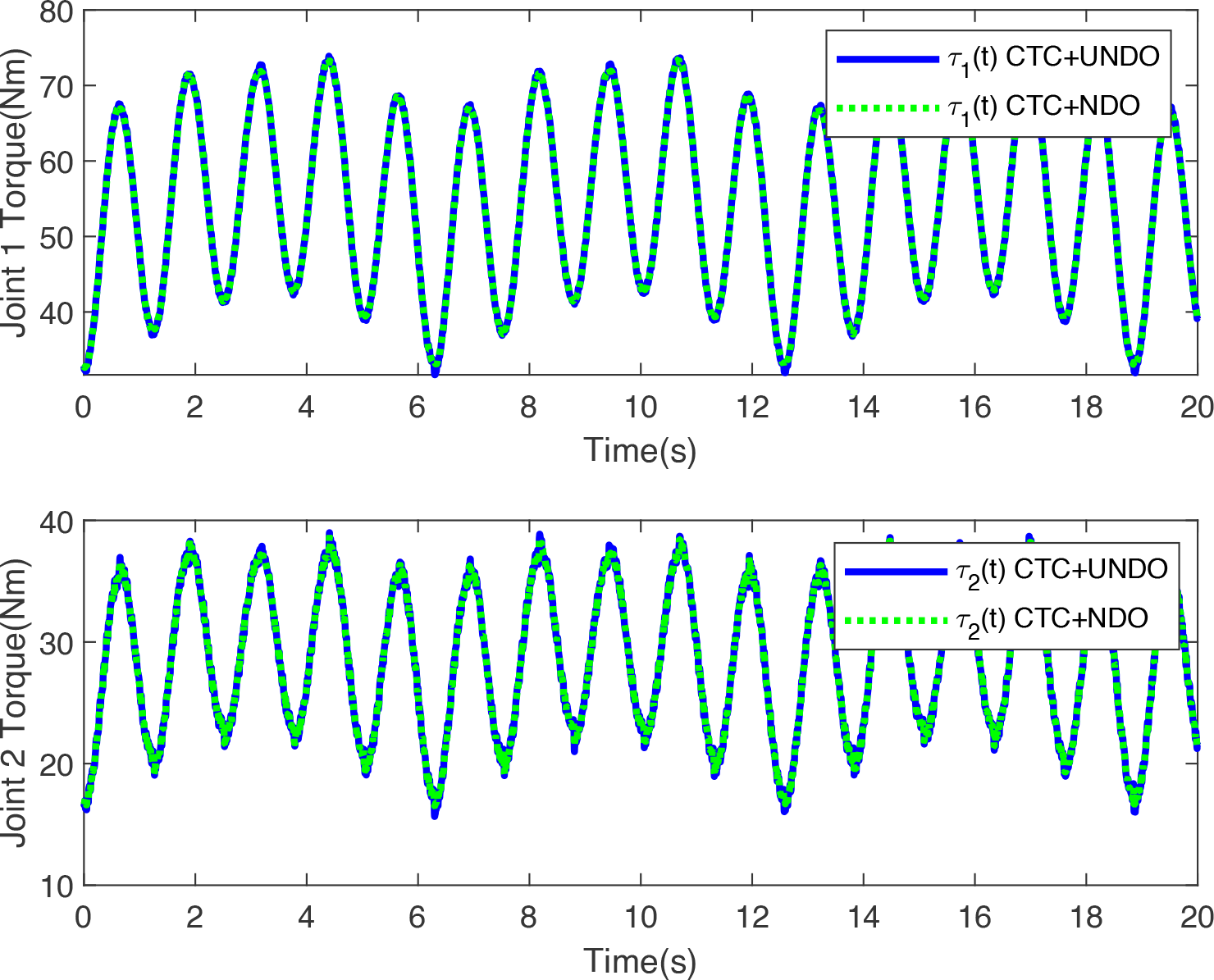
The disturbance and its estimation are shown in Figure 9. The positional tracking performance of the robot is shown in Figure 10. The angular velocity tracking performance of the robot is shown in Figure 11. The torques are shown in Figure 12.
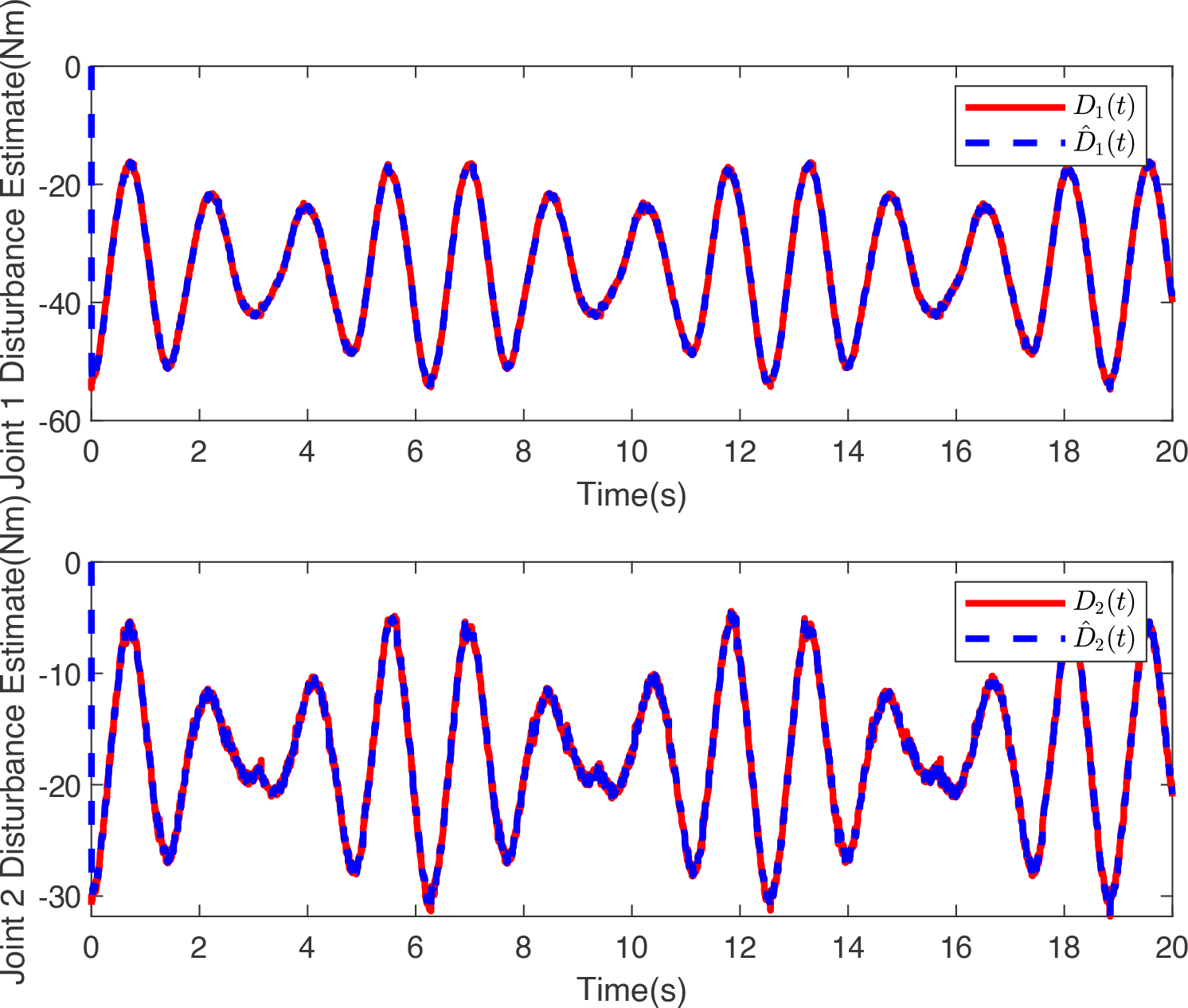
Disturbance and its estimation.

Positional tracking performance of the robot.

Angular velocity tracking performance of the robot.

Applied torques.
Figure 9 shows that the estimated disturbance
Conclusions
The behavior of the current NDO is restricted by the design of the observer gain matrix. To this end, we modify the structure of NDO into UNDO, and consequently the option range of the observer gain matrix is extended into any positive definite matrix which helps to obtain better performance. Furthermore, according to the vector differential equation of estimation error and transfer function, we analyze the stability, the transient performance, and the steady-state performance of the observer to supervise the applications. The simulation shows that the UNDO can even estimate the uniform white noise with the frequency 100 Hz. In addition, when the unknown disturbance consists of centrifugal/Coriolis force, gravity, friction, unknown payload, and modeling uncertainties, the UNDO can estimate the unknown disturbance very well in our simulation. These two simulations demonstrate the effectiveness and superiority of this proposed method.
Footnotes
Data availability
The experimental data used to support the findings in this article are available from the first author and corresponding author upon request.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China [grant no. 62103407].