
Abstract
Considering the requirements of high scientific return, low cost, less complexity, and more reliability for the robot proposed by the extreme environment exploration task on the planet surface, this article comprehensively reviews the history of the special spherical robot used for extraterrestrial surface exploration and summarizes the environmental characteristics and task difficulties of different planet surface. This article compares the advantages of different types of ground spherical robots and points out the superiority of special spherical robots, such as omni-direction, airtightness, zero-radius turning, under-actuated, swarming, and lightweight. In addition, the research progress of special spherical robots for extraterrestrial exploration, such as wind ball, jumping ball, fly ball, ball with leg, pendulum driven ball, tensegrity structure, are reviewed respectively. Finally, the performance characteristics of all these robots are analyzed, their application scope given.
Keywords
Introduction
Extraterrestrial exploration is of great significance: explore life or higher intelligent organisms outside the earth, develop and utilize the rich resources and energy of extraterrestrial, explore and transform the habitable planet of interplanetary immigrants, and ensure the peaceful and sustainable development of mankind. Extraterrestrial exploration missions have been and will continue to rely on automated unmanned spacecraft and robots to obtain the scientific data we need to enhance our understanding of the universe for a long time in the future.
The Moon is the outpost of space exploration. Whether manned or non-manned missions, lunar exploration is concentrated in the “Apollo” era. The “Chang’e” mission is a new round to explore the lunar surface in the past decade. Mars is the focus of extraterrestrial exploration. In the past 20 years, NASA has landed several rovers on the surface of Mars, and after the “Perseverance,” the Chinese “Zhu Rong” became the second rover to successfully land on Mars in 2022. Asteroids are the hotspot of space exploration. Asteroids and comets are small bodies in the solar system. They are not only considered to be the remnants of the early formation of planets, but also may be the origin of water on the earth. In 2020, Hayabusa 2 returned to the earth with samples of Ryugu. Unmanned robot is an important tool to replace human in extreme environment, and plays an extremely important role in planet exploration. 1
Robots can walk in different environments, complete complex tasks, and meet human needs. In order to achieve this goal, people have developed various mobile robots, including wheeled, legged, and spherical robots. Wheeled robots can move at high speed efficiently and smoothly on flat ground, and legged robots can climb obstacles. The current lunar rover and Mars rover generally adopt the wheel leg structure. The spherical robot can move in all directions, and its sealed shape protects the internal mechanism and electronic equipment from external interference. The shape of the spherical robot also helps it recover from collision and has the anti-overturning ability of moving on steep slopes. Therefore, spherical robot is also one of the feasible solutions with the potential of mobile exploration in the complex terrain of extraterrestrial planets.
In fact, some related articles have been published in the past few decades on the investigation of spherical robots (as shown in Figure 1). In 2006, Crossley 2 briefly summarized the driving mode, dynamic modeling methods and applications of spherical rolling robots. Suomela and Ylikorpi 3 introduced the development history of “Roll” series ball shaped robots, and Rhodri and Julian 4 classified the design principles of rolling robots from the perspective of bionics. Richard and Abhilash 5 reviewed the driving principle of spherical robots from 1996 to 2012. In 2019, Zhan and Li 6 introduced the structural design, dynamic modeling and control methods of BHQ series spherical mobile robots. In 2021, Bahar et al. 7 reviewed the research progress of amphibious spherical robots since 2015, and divided their driving modes into three categories: leg drive, combined drive, and linear drive. In 2022, Bujnák et al. 8 divided the driving principle of spherical robots into three categories: direct drive, gravity drive, and angular momentum drive, summarized the corresponding dynamic empirical formula, and proposed a spherical robot concept that can be used for underground gas exploration. In contrast, this article attempts to review all relevant published reports in the field of spherical robots related to extraterrestrial exploration, which can be used as examples of robot design, modeling, planning, control and application in extreme service environments.

Systematic review flowchart. (a) Review of spherical robot. (b) Papers about spherical extraterrestrial explorers.
This article is based on the reports available before May 2022, including published journals, conferences, dissertations, official organization web pages, videos, and so on. The journal and conference data are from IEEE, Scopus, Web of Science (WOS), EI village, ISTP, and CNKI. The keyword “spherical robot” is used for retrieval, and then “planet exploration” is used for secondary screening, and the preliminary search results are obtained. Finally, in the process of reviewing these documents, about 86 directly related documents were obtained. Ten reviews related to spherical robots were retrieved, including seven in 2012 and before, and one review related to spherical robots for extraterrestrial exploration, which was published in 2005. The rest did not specifically report spherical robots for extraterrestrial exploration. Based on the classification of 86 directly related literatures, this article also reviews the jumping ball, fly ball, and ball with foot that are not summarized in detail in 10 reviews.
Based on the above views, this article is organized as follows: after the introduction, in the first section, the characteristics and existing problems of different exoplanet surface mobile exploration missions are reviewed, and the advantages of different types of ground spherical special robots are compared. In the second section, we analyze the types and characteristics of various spherical mobile robots with the ability to detect the surface of extraterrestrial planets, and summarizes the research progress of various types according to the timeline. In the third section, some conclusions are drawn in order to provide useful references for the research and application of extraterrestrial planet surface exploration robot technology in the follow-up tasks in the field of deep space exploration in the future.
Characteristics and problems of different extraterrestrial planet surface mobile exploration missions
Extreme environmental conditions on the surface of different extraterrestrial planets (as shown in Table 1) pose severe challenges to the design and exploration tasks of exploration robots. The difficulties faced by the exploration robot mainly include: (1) To pass through bumpy and dangerous rugged terrain; (2) avoid or climb over large obstacles (rocks, steep slopes); (3) the soft extraterrestrial surface soil reduces the traction of the small probe vehicle; (4) no atmosphere or low atmospheric density makes heat dissipation (heat conduction and heat convection) difficult; (5) the temperature difference between day and night is large, such as the temperature difference between day and night on the Moon can reach 310°C; (6) there is the influence of dust or strong wind (on Mars), the static electricity of lunar dust affects the exposed electrical system, and the sticky dust of Mars will cover the solar panels; (7) low gravity or microgravity; (8) long or permanent darkness (Moon night, lava tube); (9) cosmic ray interference; (10) hidden dangers of vacuum cold welding; (11) the cost of long-distance transportation is high, especially when returning and soft landing need to be considered. The main requirements of the exploration mission mainly include: (1) high quality scientific return; (2) low cost, low complexity and high reliability. As one of the mechanisms with the potential of extraterrestrial exploration, spherical robot has appeared a variety of driving concepts from the beginning of this century to recent years. Each driving mode is discussed from the adaptability of extraterrestrial special environment, motion flexibility and control complexity, which is the necessary condition for putting forward a new concept of extraterrestrial exploration spherical robot.
Environmental considerations for rover design.

When the spherical robot is performing environmental detection, it is necessary to ensure the stability of the camera and other airborne equipment inside the robot, and it can move according to the remote-control command or along the planned path, which requires the spherical robot to have good motion controllability and stability, real-time and high motion precision. However, the spherical robot has the characteristics of non-holonomic constraints, under actuation, non-chain, strong coupling, and so on, and has a tendency to oscillate, which makes its theoretical model very complicated. The motion control of spherical robots has always been a difficult problem to solve. In addition, most of the traditional nonholonomic constraint control theories are researched on chained systems, but the spherical robot model cannot be transformed into chained systems, which makes it difficult to apply relevant theories to the motion control of spherical robots, which further hinders the application and development of spherical robots.
Structure and characteristics of different types of spherical robots
After more than 20 years of development, spherical mobile robots have evolved into a variety of structural forms, which can be divided into four types: land, water, air and multi-habitation according to application scenarios. For extraterrestrial planets in different extreme environments, spherical mobile robots with different application scenarios can be adopted. The summary of the existing spherical mobile machine structure may help to inspire the design of new mechanisms for alien planet detection robots.
In this article, spherical robots are divided into 14 categories according to the driving mode (as shown in Figure 2), including: single wheel drive, trolley drive, mass block drive, pendulum drive, flywheel drive, deformation drive, hemispheric differential, jump, pneumatic, hydraulic, electromagnetic, propeller, rotor, hybrid drive. The driving mode shown in Figure 2(a) to (i) can be summarized and explained in the existing literature, while hydraulic and electromagnetic driving are emerging driving modes, especially electromagnetic driving shows its potential in the medical field. Propellers are generally suitable for downstream water, rotors are generally suitable for air flight, and hybrid driving is suitable for amphibious or obstacle climbing. It can be used for different purposes according to different driving principles.

Structural diagrams of different types of spherical robots. (a) One wheel, (b) car drive, (c) mass block, (d) pendulum, (e) flywheel, (f) deformation, (g) halfsphere, (h) hopping, (i) pneumatic, (j) hydraulic, (k) electromagnetism, (l) propeller, (m) quad-rotor, and (n) hybrid drive.
Spherical robots generally adopt the internal driving principle, that is, the driving mechanism and electrical equipment are inside the spherical shell. The fully sealed spherical shell can be used as a thermal insulation and pressure protection structure, which can prevent the internal electronic components and joint bearings from being polluted by external dust or scratched by sharp objects, so that the robot has omni-directional anti overturning performance and amphibious characteristics. Therefore, the spherical robot has the potential of extraterrestrial exploration.
Classification and research status of spherical mobile robots for planetary surface exploration
According to the reports consulted, the types of spherical robots studied for planet exploration can be mainly divided into: wind ball, jumping ball, fly ball, ball with leg, pendulum driven ball, tensegrity structure, and so on.
Wind ball
In the face of long-time and long-distance unmanned mobile exploration on the surface of planets, it is necessary to find effective solutions that can improve the endurance of robots. Solar energy, soil chemical energy, and wind energy are considered as feasible in-situ enabling technologies to improve the endurance of unmanned exploration robots. At present, solar energy is the most widely used and mature in the planet exploration. The probes that have landed on the Moon and Mars use solar energy technology for endurance. But solar energy is not the only and probably not the most reliable source of energy, because the planet far from the sun receives very little sunlight, and the polar regions of the planet maybe are dark for several months every year. Recently, human beings have collected new soil samples from the Moon and asteroids, so the soil chemical energy may become a new in-situ propulsion technology in the near future.
Wind power is an ancient way of in-situ propulsion. From 1995 to 2006, the application of wind power for Mars exploration has been effectively demonstrated in ground experiments. In 2005, Hajos et al. 9 summarized the development history of Tumbleweed Rovers according to research institutions, including JPL, NASA Langley Research Center, Swiss Federal Institute of Technology Lausanne, Texas Tech University (TTU), and North Carolina State University (NCSU).
Antol 10 introduced a series of ground experiments of different types of Tumbleweed Rovers. Research shows that on Mars, a 20 kg Tumbler Rover can carry a payload of equal mass. Under the wind speed of 20 m/s at noon on Mars, it can roll at a speed of about 10 m/s, and it is easy to climb a 20° slope. When the wind speed reaches 30 m/s, it can even climb a 45° slope. The Tumbleweed rover can easily climb over these obstacles, when the diameter of rover is three times the height of obstacles.
The main problem of the Tumbleweed rover is that it cannot move directionally because there is no active drive installed inside. In 2004, Ylikorpi et al. 11 developed a Russian thistle prototype with the support of the European Space Agency’s Ariadna project. The prototype is driven by a pendulum, which can realize directional movement. Ylikorpi changed the diameter of the sphere through the ratio of atmospheric density between earth and Mars, so as to simulate the equivalent Martian aerodynamics on earth. The research results show that under a given wind speed, to maintain the same rolling torque, the diameter of the ball required on Mars is four to six times that of the ball on earth. At a given wind speed, the resistance of a ball 11.7 m in diameter on Mars is similar to that of a ball 1.5 m in diameter on earth.
Before 2012, the research focus of wind driven ball was Tumbleweed. 9 –12 After that, Moball, which can generate electricity by itself, has received extensive attention. In 2012, Davoodi and Davoudi 13 proposed a concept of spherical mobile sensor platform with wind energy collection capability, called Moball (as shown in Figure 3(a) to (c)). Moball is equipped with three orthogonal tubular linear drivers/generators, each of which is composed of a moving permanent magnet (PM) and several solenoid stators (as shown in Figure 3(e)). This design generates the ball centroid offset and electromagnetic inductive effect through the movement of PM, so as to realize the main steering control and energy collection. Moball’s exploration targets are the glacial polar regions of Mars, Europa and the Earth. Its electrical system has passed the extreme temperature test of −180°C to 110°C, which provides a guarantee to adapt to the extreme temperature difference of planets surface. Moball can also be used to establish a distributed sensor network. 14 Multiple Moballs can communicate with each other to share data, and transmit the data to orbital satellites, so as to realize low-risk deployment and exploration of large-scale wireless networks (as shown in Figure 3(d)). The effectiveness of Moball’s energy generated by wind is verified by simulation 15 and prototype test 16 (as shown in Figure 3(f) and (g)). The experimental test in Greenland polar environment shows that, Moballs can effectively generate electricity and collect data in extreme environments. 17 The memory and computing resources of the extraterrestrial exploration robot are limited, so reducing the computing requirements in the robot control process must be considered. The Lagrange equation based on BKMM method can effectively simplify the complex dynamic equation form of Moball, 18 and this method is also applicable to legged mobile robots. In 2017, by establishing a simulation experimental platform (as shown in Figure 3(h)) to track the characteristic trajectory of a single quality control element, the performance of the solenoid actuator was quantitatively evaluated. 19

Moball series wind driven self generating spherical robot.
In 2017, Zhai et al. 20 of Shanghai University tested the influence of different layout of pipelines in the Moball on power generation. By comparing the power generation performance of pipelines in different positions, combined with simulation and experiments, the correctness of the pipe power generation model of self-generating spherical robot was verified. Different spatial structures of power generation pipelines in Moabll will have an impact on power generation efficiency. Using the energy acquisition system (as shown in Figure 3(i)), the research results on the power generation performance of the device under different speeds and magnetic block layout show that the short pipeline structure can increase the speed range of acquiring electromotive force, 21,22 and the induced electromotive force value obtained by the single unit pipeline structure model is greater than that of the double unit pipeline structure model. However, the stability of the two unit pipeline structure model is better. 23
Jumping ball
According to the law of energy conservation, equal elastic potential energy can obtain greater displacement in low gravity or microgravity environment, so jumping is an effective way of movement in low gravity extraterrestrial environment. Jumping robots are mostly based on bionic design, with four legged frogs, six legged grasshoppers, and two legged kangaroos as typical representatives. These bionic design trajectories are generally limited by the plane where the connecting rod is located, and there is the possibility of rollover. In the actual extraterrestrial exploration mission, the robot needs to have omni-directional motion ability, and the spherical jumping robot provides this possibility. According to the structural characteristics, the spherical jumping robot can be divided into: closed structure jumping ball, semi closed structure jumping ball and open structure jumping ball.
Closed structure jumping ball
Closed structure jumping ball refers to the structural mode in which the internal mechanism and components are completely wrapped by a closed spherical shell. In 1999, Fiorini et al. 24 of JPL introduced a compact and lightweight spherical robot Hopper (as shown in Figure 4), which can roll and jump. The Hopper is composed of a transparent spherical shell, a bouncing leg, a camera swing arm, and so on. The direction can be adjusted by rotating the camera swing arm, and then the bouncing leg acts with the ground to jump to the specified position.

JPL Hopper.
In 2005, Prof Dubowsky’s team 25 proposed the concept of Microbots (as shown in Figure 5), which is aimed at large-scale planetary surface and underground exploration. One Thousand Microbots have the same mass and volume as a single Mars rover Spirit. Simulation analysis shows that Microbots can jump up to 1.5 m in height and 1 m in horizontal distance under the gravity of Mars. Microbot with a diameter of about 100 mm and a mass of 100 g can jump more than 2000 times in Mars missions, and its life span can be as long as 10 years. 26 Microbot uses dielectric elastomer actuators (DEAs) to generate jumps, and high-efficiency hydrogen fuel cells can provide power for DEAs. 27 Lithium hydride hydrolysis is a highly efficient hydrogen fuel storage and release method, and its theoretical fuel specific energy is as high as 4900 wh/kg, which makes it possible for Microbot to have a long endurance. 28 Both Hopper and Microbot, from the perspective of reducing the number of drives, overall size and weight, have the characteristics of lightweight, low power consumption, less complexity and swarm exploration. They are typical representatives and enlighteners of spherical jumping robots in extraterrestrial exploration applications.

Microbots for mars mission. (a) Structure of Microbots. (b) Swarm exploration concept of Microbots. (c) Prototype of Microbots.
In recent years, Jekan Thangavelautham of the Space and Ground Robot Exploration Laboratory (Spacetrex) of Arizona State University has proposed the concept of SphereX series of spherical robots for planet exploration. The main purpose of this series of robots is to realize jumping movement, which is divided into fuel injection and mechanical jumping. Among them, fuel injection (as shown in Figure 6(a)) can realize various movements of jumping, flying and rolling in the lunar vacuum environment. The fuel injection SphereX can fly 5 km in the lunar environment each time, with a flight time of 0.7 h. 29 Its jet dynamics characteristics and mapping navigation control technology have been verified on the UAV carrying 3D laser radar. 30

SphereX robots. (a) SphereX driven by fuel. (b) SphereX driven by spring. (c) Multiple SphereX climbing sequences in low gravity. (d) Carrying scheme of SphereX on CubeSat Lander. (e) Cave exploration scheme of SphereX.
SphereX based on electromechanical jumping (as shown in Figure 6(b)) is not limited by the amount of fuel it can carry. It is composed of three support feet that can operate independently to change the jumping angle and a spring mechanism that can jump intermittently. 31 During the lunar day, SphereX collects energy through solar energy for endurance. During the lunar night or in the dark Moon lava tube, energy can be transmitted to SphereX from the base by laser, so that SphereX can complete charging without returning to the base. 32
Several SphereX robots can be used to explore the caves, valleys, craters, and other places that are not easy to reach by active rover of the Moon, Mars and frozen satellites. 33,34 Cover the surface of each SphereX with micro barbs, and connect multiple SphereX with spring ropes (as shown in Figure 6(c)), imitating the actions of mountain climbers. SphereX can also realize the climbing function on steep cliffs and canyon walls. The research results show that with the increase of the number of robots, the climbing speed is faster and the failure risk is lower. 35 Figure 6(d) shows the specific scheme of CubeSat cube satellite lander carrying multiple SphereX, 36 and Figure 6(e) shows the process of SphereX from landing to entering the lunar lava tube exploration. 37 With SphereX, we can fly into or jump into the cave directly from the lava tube skylight without the traction of the descent rope.
The pendulum driven spherical robot can also jump, and its vertical take-off condition is proportional to the square of the absolute angular velocity of the weight rotating around the center of the ball when taking off. 38 Through the combination of spring tensioning mechanism and pendulum mechanism, the spherical robot can realize directional and repeated jumping. 39,40 The shell of the spherical robot is generally made of hard materials, while the soft spherical shell is deformable and lighter, and the jumping height is higher than the hard spherical shell, but the rolling controllability is poor. 41 In 2022, for the complex and unknown terrain in deep space exploration, Wang et al. 42 proposed a multi motion mode spherical robot (as shown in Figure 7). The robot rolls through a pendulum and a two degree of freedom rotating frame, and jumps through an internal spring mechanism. The minimum turning radius of the prototype is about 150 mm, the maximum rolling speed is 800 mm/s, and the vertical jump is about 170 mm, which is 1.13 times its own diameter. Through numerical simulation, the author verifies that the spherical robot mechanism has faster rolling speed and higher jumping height in microgravity environment, and can be used for rapid and long-distance mobile exploration of unstructured planets such as the Moon and Mars.

Spherical jumping robot from BIT.
Semi-closed structure jumping ball
The semi-closed jumping ball has a spherical structure, but the spherical shell is not a fully sealed structure. It is generally composed of hollow spherical shell or two hemispheres, and jumping by internal flywheel or jumping legs between hemispheres.
In 2012, NASA and Stanford University 43 –45 cooperated to develop a robotic Hedgehog (as shown in Figure 8). The robot is covered with thorny support legs outside and installed with three rotatable flywheels with different directions inside. The inertia force of the flywheel’s sudden acceleration drives it to jump. The thorny support legs avoid the problem of the robot losing adhesion and idling in the asteroid microgravity environment.
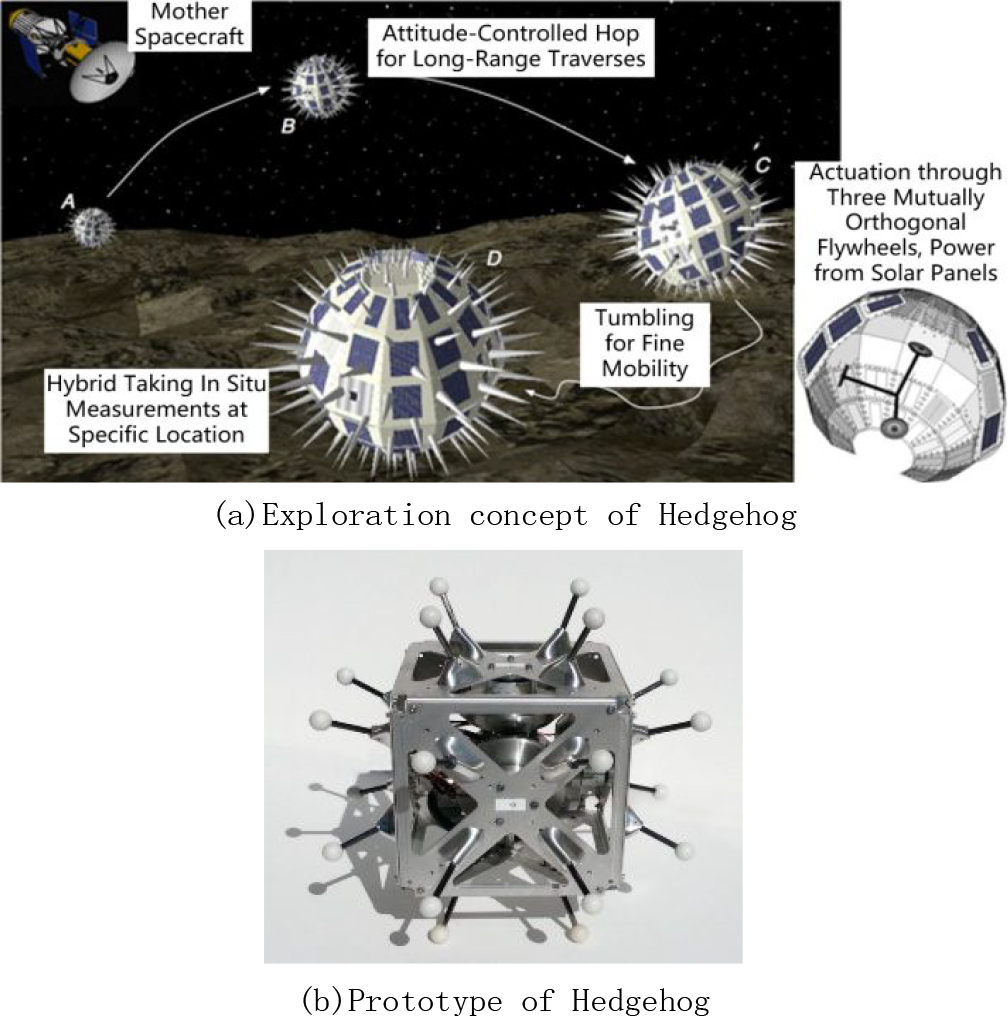
Hedgehog robot. (a) Exploration concept of Hedgehog. (b) Prototype of Hedgehog.
In 2017, Space and Terrestrial Robotic Exploration (SpaceTREx) Laboratory of University of Arizona 46 proposed a jumping spherical rover with a mass of 2 kg and a diameter of 150 mm. This rover is one kind of SphereX series (as shown in Figure 9). The two hemispherical shells of SphereX are designed with a large number of lug, which can improve its traction on the soft ground of the planet. The middle opening of the robot is equipped with two cameras. The elastic jump arm is periodically stored and released by a spiral cam. By building a low gravity migration and motion aided simulation system to simulate different terrain and slopes under Martian gravity, the jumping performance of the SphereX was tested. In its preliminary design experiment, the jumping height of SphereX in Martian gravity simulation environment was 80–100 mm.
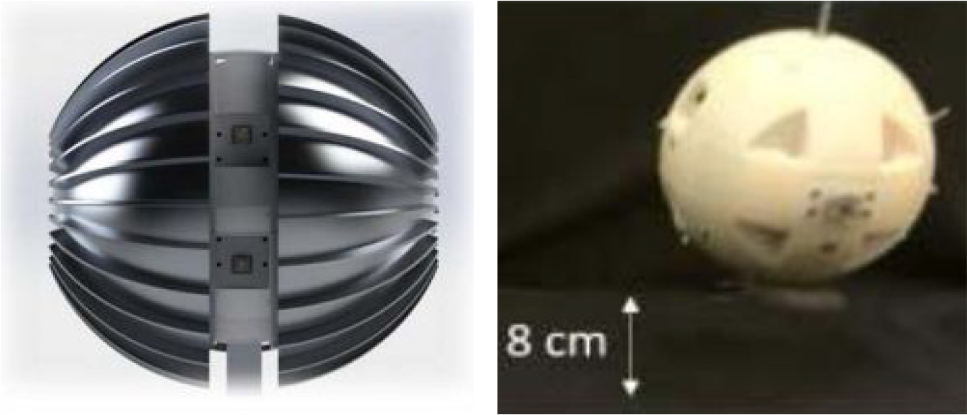
SphereX driven by jumping leg.
The spherical jumping Rover 47 (as shown in Figure 10) developed in 2019 based on the German Space Agency’s MASCOT("Mobile Asteroid Surface Scout") mission is also driven by three action wheels. The robot installs all scientific instruments of MASCOT, including Micro-Omega magnetometer, GNC sensor, solar array, and antenna, in a sphere with a diameter of 20 cm, in order to measure the magnetic field near the Apollo17 landing area. The spherical structure can improve the mobility and walking distance, but due to the difficulty of spherical processing, the designer finally adopted the completely open cage structure.

Hopping Rover for MASCOT mission.
In 2022, Chang et al. 48 designed and implemented a new spherical robot RolLeapO with rolling and jumping capabilities (as shown in Figure 11). The robot has two independently driven hemispheres, which can produce rolling and rotating motions. The robot also has a five link mechanism with a release/retract mechanism for jumping. And that uses only one degree of freedom to control and switch the mechanism in three different stages: retraction, maintenance and release. The average jumping height of the robot reaches 254 mm, which is equivalent to the diameter of the sphere. The robot can also jump when rolling to an obstacle of 14 cm, which is equivalent to 1.14 times the radius of the sphere.
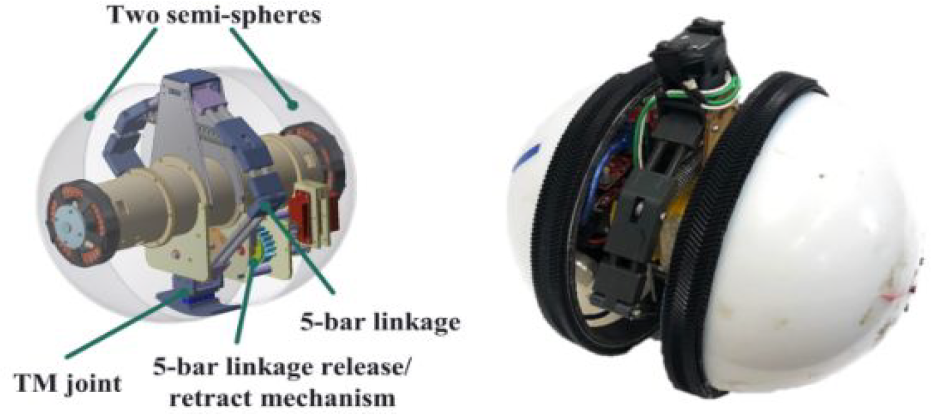
RolLeapO.
Open structure hopping ball
The open structure hopping ball is generally a cage structure, which has the characteristics of light weight and large deformation. ‘Superball" 49 is an elastic ball composed of an internal rotor and an external elastic ball shell (as shown in Figure 12(a)). Theoretical analysis and simulation have proved the necessary conditions for the bouncing ball to jump and climb back and forth in two vertical planes. This ability plays an important role in the exploration of extraterrestrial cave cracks. In 2005, Ritsumeikan University 50 in Japan proposed a spherical jumping prototype composed of shape memory alloys (as shown in Figure 12(b)), which realizes deformation jumping through high-voltage charging and discharging. Jollball spherical hopping robot 51 (as shown in Figure 12 (c)) is composed of metal ring springs, which deform the metal ring by contracting the intermediate shaft to realize rebound. Ecole Polytechnique Federale de Lausanne in Switzerland (École Polytechnique Fédérale de Lausanne, EPFL) has developed two micro jumping robots EPFL I and EPFL II with self-healing function. EPFL I 52 (as shown in Figure 12(d)) is composed of a single bionic jumping leg and a circular outer cage, which can overcome 76 cm obstacles at a 75-degree take-off angle. EPFL II 53 is a pear shaped mechanism (as shown in Figure 12(e)) that can control it to carry out continuous step jumping. In 2022, Hawkes et al. 54 published an article on nature introducing a jumping mechanism (as shown in Figure 12(f)), with a diameter of 0.3 m, a total mass of 22.5 g, and a jumping height of 30 m, which is far higher than the jumping height of the existing artificial jumping mechanism, and an order of magnitude higher than the jumping height of the best natural creatures. On the Moon, the jumping height of the robot can reach 125 m, and the jumping distance can reach half a kilometer, this is the performance limit of jumping robots at present. The state of art of spherical jumping robot is as shown in Table 2.

Spherical jumping robot with open structure. (a) Superball, (b) SMA, (c) Jollball, (d) EPFL I, (e) EPFL II, (f) Jumper.
The lightweight structure of the open structure hopping ball can greatly reduce the launching and carrying costs, and the ability of repeatable directional jumping and self-recovery can realize large-scale controllable movement and obstacle surmounting. But at the same time, it’s noted that the open structure makes the electrical system vulnerable to extraterrestrial extreme environmental interference, and the flexible elastic structure may not be able to carry a large mass scientific load, which may lead to a single exploration result and a reduction in the quality of scientific returns.
State of art of spherical jumping robot.

Spherical aircraft
Fast large-area scanning is an effective way to detect the unknown unstructured environment, and flight is an effective means to achieve fast scanning. There are two main ways to realize fast and long-distance flight on the surface of planets: jet and propeller. Sphere-X is a representative of jet, which can be used for the exploration of planets without atmospheric pressure, such as the Moon. However, the limited fuel reserves determine that its farthest exploration distance is also limited. For planets with atmospheres such as Mars and Titan, the portable and foldable flight mode of propeller is an excellent choice. As of April 2022, NASA’s ‘Ingenuity’ Mars helicopter has completed 25 flights to Mars, with a cumulative flight distance of 5824 m. In 2019, NASA also proposed a shapeshifter robot (as shown in Figure 13), 55 which is planned to explore Saturn’s Moon—Titan. Shapeshifter robot is composed of several small robots called Co-bots, each equipped with a small propeller that allows them to move independently of each other. Shapeshifter can change its combined shape according to the type of external terrain it encounters. They can fly along the cliff edge, conduct cave exploration activities, and form a daisy chain pattern to maintain contact with the ground. Finally, they will become spheres to roll on a flat surface to save energy. The author simulated the terrain of Titan with ROS/Gazebo. The simulation model was obtained from the elevation map of Titan captured by Cassini.

Shapeshifter robot concept and its experimental prototype.
Similar to the jumping spherical robot with open structure, the spherical flying robot also has a lightweight cage structure, which has the anti-collision characteristics of protecting the propeller and the function of rolling on the ground. According to the mechanism of aircraft, spherical flying robots can be divided into coaxial spherical flying robots and multi axis spherical flying robots.
Coaxial spherical aircraft
Coaxial aircraft can be divided into spiral single propeller and coaxial double propeller. Its structure mainly consists of cage shell, propeller and control rudder blade. In 2011, Sato Humiyuki, 56 a researcher at the Japan Technology Research and Development Institute (TRDI), developed a Japanese flying Sphere (JFS) (as shown in Figure 14(a)). The JFS includes a propeller, eight control blades and a small wireless camera, which can realize stable hover monitoring. When the power is low, it can use the rolling mode to roll omnidirectionally on the ground. Following JFS, the typical structures of single propeller and control blade are BYFQ 57 (as shown in Figure 14(b)), UFRO 58 (as shown in Figure 14(c)), TVAC 59 (as shown in Figure 14(d)), and UNI-copter 60 (as shown in Figure 14(e)). Beyer and Costello 61 proposed a micro coaxial two propeller robot hopping Rotochute (as shown in Figure 14(f)) with flying and jumping capabilities for complex environments such as caves and collapsed buildings. Its structure does not control the rudder blade, but generates pitching torque through the offset of an internal mass block. Kyosho space ball 62 (as shown in Figure 14(g)), which is similar to the hopping Rotochute in structure, can roll but has no jumping function. Gimball 63 is a spherical flying robot including two orthogonal rotating frames (as shown in Figure 14(h)). The external spherical frame of Gimball is composed of carbon fiber connecting rods and three-way connectors. The internal drive of Gimball is composed of coaxial twin blades and four control blades, equipped with high-definition cameras, ultrasonic sensors, six-axis IMU, and other micro sensors. Two internal orthogonal rotation frame can make the coaxial propeller tilt to any angle.

Coaxial spherical aircraft. (a) JFS, (b) BYFQ, (c) UFRO, (d) TVAC, (e) UNI-copter, (f) Hopping Rotochute, (g) Kyosho Space Ball, (h) Gimball, (i) Symmetrical propeller, and (j)Three blade aircraft.
Santos-Medina G et al. 64 proposed a coaxial symmetric two propeller spherical aircraft without control blades (as shown in Figure 14(i)), which has an inner and outer frame similar to Gimball, but it does not control the blades, but controls the direction of the robot through the asynchronous rotation of the upper and lower propellers that can rotate independently. Malandrakis et al. 65 studied the coaxial double propeller with three blades (as shown in Figure 14(j)) and proposed a disturbance observer adaptive control algorithm based on neural network. 66
Multi axis spherical aircraft
In recent years, multi axis aircraft, especially four rotor aircraft, has been a research hotspot. The cover article of Science Robot in May 2022 introduced the optimal planning algorithm to enable groups of small four rotor flying robots to explore the unknown environment independently and safely. In 2010, Quanser 67 launched a spherical aircraft called Qball-x4 (as shown in Figure 15(a)). The whole quadrotor UAV is wrapped in a carbon fiber cage, and the quadrotor UAV is fixed with the carbon fiber cage through a connecting rod. The four rotors of HyTAQ 68,69 (as shown in Figure 15(b)) are connected with both ends of the cylindrical outer cage through a connecting rod and can rotate relatively. This flight/rolling hybrid motion makes the walking distance of HyTAQ about four times that of pure flight, and the running time about six times that of pure flight, so the operation efficiency is higher.

Multi axis spherical aircraft. (a) Qball-X4, (b) HyTAQ, (c) Skye, (d) ATR, (e) Elios, (f) Elios3, (g) PRSS UAV, (h) HIT, (i) Rollocopter, and (j)FBall.
Skye 70 (as shown in Figure 15(c)) is composed of helium filled balloons and four uniformly distributed propeller propellers. Because the helium balloon itself can float freely in the air, this design can run in the air for a longer time, which is very beneficial in the exploration of extraterrestrial spheres with atmosphere such as Mars or Titan. ATR 71 is a micro air ground robot (as shown in Figure 15(d)), which has the ability of air flight and ground rolling, and its application range includes search and rescue, map drawing and monitoring. Its small size makes it easy to carry and enables the robot to move in a narrow space (such as an air duct).
On the basis of Gimball, Flyability launched Elios series 71 (as shown in Figure 15(e)) spherical aircraft products, which are equipped with sensors such as thermal cameras, radars, and LED lighting systems, and have been widely used in natural gas pipeline exploration, mine cave exploration, public safety exploration, and other fields, In May 2022, Flyability released Elios 3, the world’s first anti-collision lidar UAV for Indoor 3D mapping (as shown in Figure 15(f)). PRSS UAV 72,73 is an unmanned aerial vehicle with a passive rotating spherical shell (as shown in Figure 15(g)). The UAV and the spherical shell are connected by a three degree of freedom gimbal mechanism, so that they can rotate independently in all directions. When the UAV collides with obstacles, it can still maintain its flight stability, because only the shell is disturbed and rotated.
PRSs UAV has been proved to be used for bridge short-range damage exploration. Zhang et al. 74 proposed a multi posture spherical robot (as shown in Figure 15(h)), which combines four legged crawling, spherical rolling and four rotor flight, and can take off and land on uneven terrain.
In 2019, the University of Arizona, JPL laboratory and Cornell University 75,76 jointly proposed a rolling helicopter Rollcopter (as shown in Figure 15(i)). Rollcopter is used to verify the movement ability of Shapeshifter in spherical mode and to detect planets and satellites with atmospheres. Rollcopter includes three pairs of six propellers, each pair of which is orthogonal, so it can generate airflow in any direction. Six propellers are wrapped in hollow soft spherical shells, so it can fly in any direction, and has the functions of rolling on uneven ground and mitigating collision. FBall robot 77 (as shown in Figure 15(j)), whose shell is composed of hexagonal hollowed out foam, is internally equipped with a small four rotor UAV. In rolling mode, the pitch angle of two propellers is set to a negative value, and the pitch angle of the other two propellers is set to a positive value. In flight mode, the pitch angle of all propellers is set to the same value.
The flying spherical robot is composed of simple mechanical structure and ready-made commercial off the shelf (COTS). With the increasingly mature teleoperation flight control technology, it has been widely used in many fields on the ground, and can carry a variety of sensors, which provides a reliable technical foundation for the exploration of extraterrestrial space. Table 3 shows the performance comparison of different spherical flying robot.
Performance of different types of spherical aircraft.

Ball with foot
The rolling performance of the spherical structure on the flat ground has the advantage of faster moving speed and smaller turning radius than the wheeled or legged structure, but the legged robot shows greater advantages in multi-level obstacle crossing or gully crossing. Therefore, some scholars have transformed the closed spherical shell into a deployable petal structure or designed a legged structure that can extend the spherical shell. Thus, the mobile ability of the spherical robot in the field or disaster site and other complex terrain is improved.
Edwin and Mazzoleni 79 of North Carolina State University in Raleigh, aiming at the problem that the traditional exploration vehicle with rocker bogie suspension is not suitable for driving on steep slopes, proposed a concept of variable roaming exploration vehicle (TRREX) that can be used to cross rough terrain (as shown in Figure 16(a)). TRREX adopts the bionic armadillo design, has two hemispheres that can be opened, and each hemisphere is composed of four deployable spherical shells with rollers. The author considers the conditions of sliding and no sliding in the rolling process, establishes the dynamic model of TRREX in the lunar environment, and verifies the driving rolling through computer simulation. The results show that the spherical rolling mode can enhance the mobility of TRREX rover, and when TRREX goes downhill, it can change the direction of motion through the alternate opening and closing of the spherical shell, so as to avoid obstacles on the slope.

Ball to foot robot. (a) TRREx, (b) Hex-A-Ball (HAB), (c) RSR, (d) KisBot, (e) MorpHex, (f) BYQ-XI, (g) HQSMR, (h) QRoSS, (i) SHU.
The concept of ball to foot was put forward in 2006, called Hex-A-Ball (HAB) 80 (as shown in Figure 16(b)), which is composed of a hemisphere and six feet. In 2008, Jearanaisilawong and Laksanacharoen 81 proposed a reconfigurable spherical robot (RSR) (as shown in Figure 16(c)), which can be transformed into two interconnected hemispheres and three omni-directional wheel structures. Kisbot 82 is a spherical robot that can extend two support arms (as shown in Figure 16(d)). The robot is divided into three parts. The body in the middle and the hemispheres on both sides can move independently of each other. When the robot goes uphill and climbs over obstacles, it can rely on the arms on both sides to provide additional support. In 2012, Norwegian Halvorsen 83 designed and manufactured MorpHex (as shown in Figure 16 (e)), which realized the 12 foot walking and rolling of the spherical robot. In 2013, we proposed the BYQ-XI 84 spherical robot (as shown in Figure 16(f)), which can realize slope turning with two telescopic support legs. HQSMR 85 is a hybrid quadruped spherical mobile robot (as shown in Figure 16(g)), which is composed of a spherical shell and four pendulums, which can change the center of mass of the robot and support it. QRoSS 86 is a quadruped walking robot with a spherical shell (as shown in Figure 16(h)), which is composed of a spherical cage, a central rod with a rotating spring and four mechanical legs with 3 degrees of freedom. In 2017, Shanghai University (SHU) 87 proposed a spherical robot (as shown in Figure 16(i)) that relies on a double pendulum to roll and a quadruped to cross obstacles. The experimental prototype shows its design feasibility.
Pendulum driven ball
Among many kinds of spherical robots, the pendulum spherical robot is the most widely studied one 6 –8 . It is similar to a tumbler structure. When the pendulum swings, the balance position of the tumbler is changed, and the spherical shell begins to roll until another balance position. The BYQ series 88 –92 spherical robot Sun HX proposed are designed by using the pendulum driving mechanism, which has the characteristics of underdrive and zero radius turning. In terms of planet exploration, Michaud 93 designed and manufactured a three-drive pendulum spherical robot in 2001, and analyzed the advantages of the spherical robot in planet exploration. In 2008, Bruhn et al. 94 proposed the concept of planetary surface spherical motion detectors (SMIPs) (as shown in Figure 17), aiming to improve the performance limit per unit weight of robots by using micro electro mechanical systems (MEMS) and higher-level multifunctional Microsystems (MMSs), so as to meet the needs of extreme miniaturization of space systems. The preliminary study of the concept of SMIPs shows that compared with traditional robots and rovers, SMIPs has some advantages in operability, coverage, size and quality. The article also puts forward a preliminary design scheme of inflatable multi-function shell driven by pendulum. Later, the Swedish company Rotundus 95 launched the Groundbot series of spherical robots on this conceptual design. The Groundbot can roll at a speed of 10 km/h and can move in mud, sand, snow and even water. It has two wide-angle camera sensors fixed on the rotating bracket, which can transmit the real-time 360-degree wide-angle image back to the control center.

Planetary surface spherical motion detector-SMIPS.
Another kind of robot that can carry out video monitoring and return is the spherical mobile Lunar Rover (as shown in Figure 18) proposed by Lledo AC. 96 This robot won the Google Lunar X-Prize award. PicoRover is one of the three Rovers planning to launch to the Moon. In this scheme, the spherical shell is made of methacrylate, but in the final implementation, the team considers using aluminum alloy with side glass windows. Through testing in the volcanic environment of the Canary Islands, it is proved that it can realize free movement and high-definition video transmission at a distance of 2 km.

Lunar exploration robot-PicoRover.
In 2020, European Space Research and Technology Centre (ESTEC) 97 built a robot called DAEDALUS (as shown in Figure 19(a) and (b)), which is planned to be used in the lunar cave exploration project, and will focus on ‘Descent and Exploration in Deep Autonomy of Lava Underground Structures.’ The diameter of DAEDALUS robot is about 46 cm. In order to test sensors and motion systems, ESTEC has built three prototypes. The upcoming fourth prototype will be more compact and integrated, with a high degree of autonomy in addition to the payload. The fourth prototype robot is equipped with a series of push rods that help roll and can be used to remove obstacles and analyze rock properties, as well as measure temperature and radiation levels. After the 3D map of the cave is drawn by lidar, the data can also be transmitted back to the base station. The robot aims to observe the surrounding environment in 360 directions (including camera based stereo vision and laser ranging systems), and can protect itself from the harsh environment of the Moon.

Spherical robot driven by pendulum. (a) The 1st and 2nd generation of Daedalus. (b) The 3rd and 4th generation of Daedalus.
Tensegrity
In 2013, NASA Ames Research Center 98,99 designed a soft, deformable Super Ball Bot with a remotely controllable exoskeleton (as shown in Figure 20). The robot adopts a tensioned overall structure, consisting of a group of continuous pressure rods and cables. The tensioning structure disperses and absorbs the huge impact force generated in the landing process, so as to achieve a safe landing. After the successful landing, the driving force is generated through the expansion and contraction of the tensioning structure, and rolls on the planet surface with the help of the spherical structure. The summary of the tension integral robot has been in literature, 100 so it will not be described here.

Super ball bot. (a) Prototype of Super Ball Bot. (b) Landing process of Super Ball Bot.
Others
In 2021, the Japanese space agency (JAXA) 101 proposed to deploy a baseball sized variable lunar robot (as shown in Figure 21) in 2022 to take photos of the lunar surface and collect data about lunar dust. According to the pictures and data provided by JAXA, the robot is a sphere with a diameter of about 3 inches (80 mm) and a mass of only 250 g. It can roll on the lunar surface through the sphere and two wheels, and deform into a stable support leg and camera when external exploration is required. Its compact and lightweight structure is convenient for launching and carrying, and its deformable structure is suitable for walking in the harsh lunar environment.

JAXA’s deformable lunar robot.
Bahar MB et al. 7 summarized the amphibious spherical robot, introduced the driving principle of amphibious spherical robot since 2015, and divided it into three types: leg drive (as shown in Figure 22(a) and (b)), combined drive (as shown in Figure 22(c)) and linear drive (as shown in Figure 22(d)). Amphibious spherical robots can roll on land, and can also move on water, in water or under water. Therefore, they can provide mobility and adaptability for the exploration of liquid extraterrestrial planets such as Titan.

Amphibian spherical robots. (a) ASR-I, (b) ASR-IV, (c) BYSQ-III, and (d) Sea urchin robot.
Discussion and conclusion
This article summarizes several types of special spherical robots that can be used for unmanned exploration of planets, which can be mainly divided into: wind ball, bouncing ball, flying ball, ball foot changing, pendulum driving ball, tension whole, and so on.
Table 4 shows the mobility flexibility, environmental adaptability, single launch mass, control complexity, and controllability of different types of spherical robots. It can be seen that when the robot can achieve omni-directional movement and obstacle surmounting, it has high mobility. When the robot has a closed structure that can effectively protect internal components, its environmental adaptability is high. When the average total mass of the robot is less than 1 kg, its launch mass can be considered small enough. When the robot needs to control fewer actuators, its control complexity is low. When the robot can track the trajectory with high accuracy or is not easy to be affected by external factors, it is considered to be highly controllable.
Performance of different types of spherical robots.

1: Wind ball; 2: Bouncing ball; 3: Flying ball; 4: Ball to foot; 5: Pendulum type; 6: Tensegrity.
In recent years, NASA, ESA, JAXA, and other world-famous space agencies and space robot laboratories have put forward the concept and mission plan of the spherical robot for planet exploration, and carried out relevant ground simulation experiments to verify the feasibility of the corresponding spherical robot. The conclusions are as follows: (1) The wind ball and tensegrity can realize the integration of landing inspection, which is not limited by the landing conditions of the lander, and can be used to detect places that cannot be reached by active detectors such as lava tube skylights and mountains and gullies on extraterrestrial planets; (2) the miniaturized and lightweight spherical robot can carry more quantities because of the lower cost of single launch and transportation, and can be used for multi machine or cluster exploration, which can reduce the task risk while ensuring the exploration range; (3) the energy consumption of spherical rolling motion is lower than that of flying and crawling, which makes the spherical robot have longer endurance and longer moving distance; (4) a variety of spherical robot designs have been proposed for different extraterrestrial extreme service environments and exploration mission scenarios, which enrich the design connotation and form of extraterrestrial exploration robots.
According to our group’s research on spherical robots for many years, in-depth research and technical updates on the following key issues faced by spherical robots will help them break through the bottleneck of applications: (1) obstacle-surmounting ability. Compared with legged robots or the modified wheeled robot, the traditional single spherical robot mobile robot cannot climb stairs and climb over vertical obstacles. However, in the face of unknown unstructured environments such as the moon, good obstacle surmounting ability is the key factor to ensure the passing requirements; (2) movement stability. Due to the point-contact characteristics of the robot and the ground in the spherical mode and the internal pendulum driving method, the spherical robot is prone to instability on rough ground and the braking distance may be long. And the navigation planning of the robot itself brings adverse effects; (3) external perception ability. Compared with the characteristics of the open platform of wheeled robots, which can be easily equipped with various sensors, in the spherical closed mode, the occlusion of the spherical shell limits many commercial applications. The use of off-the-shelf sensors restricts its external perception level. How to design a clever mechanical structure for carrying sensors and select more abundant and reasonable sensor types is one of the key issues to be solved; (4) payload ratio. For the detection of unknown unstructured environments on alien planets, robots need to complete tasks such as mapping, sampling, and experiments. Therefore, the payload that a robot can carry directly affects the feasibility of subsequent tasks. The heavy pendulum of the traditional pendulum eccentric robot occupies a large part of the mass of the whole ball. These heavy pendulums often use lead or iron blocks, which limits the load-to-weight ratio of the spherical robot. Therefore, how to improve the payload ratio of the whole ball is a key technology One of the indicators; (5) the ability to operate externally. The integration of the mobile mechanism and the external operating mechanism will double the application range of the robot, but the research on spherical robots that can be operated externally is still relatively poor. If the spherical robot can obtain a good external operability will undoubtedly further expand its own application field and help break through its own application bottleneck.
Footnotes
Authors’ note
MG Li and HX Sun contributed equally to this work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received financial support for the research, authorship, and/or publication of this article: This research is funded by National Natural Science Foundation of China (52075046) and National Natural Science Foundation of China Youth Foud (52205016).