
Abstract
In this article, a robust discrete-time open-closed-loop proportion integral differential (PID) -type iteration learning control (ILC) algorithm is developed for the high-precision trajectory tracking control of tracked mobile robots (TMRs) with external disturbances and noises. The proposed ILC algorithm adopts the past, current, and predictive learning error items of the former and current iterations to correct the current control input variables, which finally converges to the desired trajectory through continuous iterative learning. The convergence characterization of the algorithm for TMRs under both external disturbances and noises is carried on rigorous mathematical proof. Numerical simulations and physical experiments are provided to verify the feasibility and effectiveness of the algorithm. The comparative results of two ILC algorithms indicate that the tracking performance of the proposed ILC algorithm is superior to the traditional PID-type ILC algorithm in terms of tracking accuracy and convergence rate.
Keywords
Introduction
With the wide application of mobile robots in industry, agriculture, military, and other fields, the demand for their autonomous control technology is gradually increasing. Among all kinds of mobile robots, tracked mobile robots (TMRs) can move autonomously in different terrain environments due to the advantages of large contact area between the mobile mechanism and the ground, large adhesion, strong obstacle surmounting ability, and so on. 1,2 Trajectory tracking control is a hot topic in the research of unmanned tracked robots, and their accurate trajectory tracking is the basis of autonomous navigation of TMRs. 3,4 However, in practical applications, several classical control methods are difficult to realize high-precision tracking performance because of the inaccuracy of measurement and modeling, the change of load, various uncertainties for the real TMRs. Therefore, an efficient and robust tracking control method for TMRs with strong coupling, nonlinear, and multi-variable characteristics is urgently needed.
At present, an enormous number of advanced control algorithms for the trajectory tracking problem of mobile robots have been proposed, such as neural network control, 5,6 fuzzy control, 7,8 sliding mode control, 9 backstepping control, 10 and adaptive control. 11 Zou et al. 12 analyzed the dynamic modeling and movement control of tracked vehicles undergoing skid-steering on horizontal. A computer-torque controller based on the backstepping method and a modified PID was proposed. The motion control approach accurately predicted the motion of the tracked vehicles under the presence of slippage, and improved the accuracy of the robot tracking. For the fixed-time trajectory tracking control of autonomous surface vehicles system with model uncertainties and external disturbances, Cui and Sun 13 developed a new control scheme by combining an integral sliding mode controller and a fixed-time disturbance observer, which can achieve both disturbance compensation and chattering-free condition. Compared with the trajectory tracking methods mentioned above, ILC approaches can be well applied in the trajectory tracking control of robots with repetitive tasks because they are simple and do not require the precise mathematical model of dynamic systems. ILC can also effectively avoid some problems existing in the above-mentioned control methods, for example, poor real-time capability for the neural network control, control inaccuracy with heavy computation for the fuzzy control, control discontinuity for the sliding-mode control, and explosion of terms for the backstepping control.
ILC can be divided into three types: open-loop ILC is essentially a feedforward control, which only uses the information of the previous iteration of the system and ignores the information of the current iteration, so that the system has no stabilizing effect on the controlled object even if the system convergence conditions are met. Adding appropriate feedback to ILC forms a closed-loop ILC that can reduce the system error and improve the stability of the system. However, the closed-loop ILC often needs a high-gain feedback, which affects the iterative convergence speed of the system. Moreover, the closed-loop ILC only uses the current iteration information and ignores the information of the previous iteration. Therefore, by using feedforward and feedback iterative learning, open-closed-loop ILC has been sparked by widespread interest. Many open-closed-loop ILC algorithms have been used in trajectory tracking control of mobile robots in the past few decades. Yu et al. 14 adopted past, current, and predictive learning items to design an ILC law which was applied in complicated trajectory tracking of wheeled mobile robots by quantitative simulations. However, this algorithm has poor performance in real robot applications because its sampling interval was set up so small that the real robot cannot respond in time. Wang et al. 15 proposed an ILC algorithm combined with observed motion information to overcome the uncertainties of mobile service robots in path tracking. On the side, several studies combine the advantages of mature PID technology and ILC algorithm. Kang et al. 16 presented an open-closed-loop P-type ILC algorithm to enhance the path-tracking precision of nonholonomic mobile robots with state disturbances, but the convergence speed and relative stability of the algorithm can be improved further. Wang et al. 17 extended the work by adding a variable forgetting factor to improve the robustness and stability of the algorithm. However, the value of the variable forgetting factor must be small enough for the system to obtain a better tracking performance. Ma and Li 18 proposed an open-closed-loop PID-type ILC method for linear time-invariant systems with initial state errors, but it is not suitable for the nonlinear time-variation mobile robot systems. Dong et al. 19 proposed an open-closed-loop PD-type ILC algorithm for solving the trajectory tracking problem of a two-wheeled self-balancing mobile robot by introducing a variable forgetting factor.
Through the analysis of relevant literature, the technical challenges for trajectory tracking of TMRs can be summarized as follows: Most of related works regarding the combination of PID idea and ILC algorithm only considered the combination of some parts of each
16,17,19
, and focused on the continuous time system rather than discrete-time system.
18
Most of the literature focuses on the trajectory tracking issues of wheeled mobile robots (WMRs),
20,21
autonomous underwater vehicles (AUVs),
22,23
and unmanned air vehicles (UAVs).
24,25
However, only a few studies investigate the trajectory tracking of TMRs, because it is difficult to achieve flexible control of TMRs with complex dynamics.
10,12
The sampling time adopted by the traditional ILC algorithms in numerical simulations cannot meet the real-time response of actual TMRs, for which the sampling time was set so small to acquire well tracking performance.
14
To address the aforementioned problems, we propose a discrete-time open-closed-loop PID-type ILC algorithm for the trajectory tracking control of TMRs. The main contributions of this article can be summarized as follows: The proposed algorithm not only combines the open-loop PID-type ILC and closed-loop PID-type ILC but also adapts past, current, and predictive errors to correct current control inputs. The rigorous mathematical proof of the convergence characterization of the proposed ILC algorithm for TMRs with disturbances and noises is given. In addition, the influence of disturbances and noises on the robot tracking effect are also considered in the simulations. To improve the persuasion of simulations about the sampling time, we take full account of the consistency of sampling time between numerical simulations and physical experiments, so that the sampling interval can be selected as more reasonable when it applied to real robot systems.
The organization of this article is as follows: In the “Problem description” section, we give the notations as well as their meanings involved in this article and certain mathematical definitions. The kinematic model of a tracked mobile robot and its trajectory tracking issue are described. In the “Controller design and convergence analysis” section, an open-closed-loop ILC algorithm is developed, and then the rigorous mathematical proof of the convergence of the algorithm is provided. In the “Simulations and experiments” section, the comparative results of numerical simulations and physical experiments using two ILC algorithms are analyzed. Lastly, conclusions are given in the final section.
Problem description
Notations and mathematics backgrounds
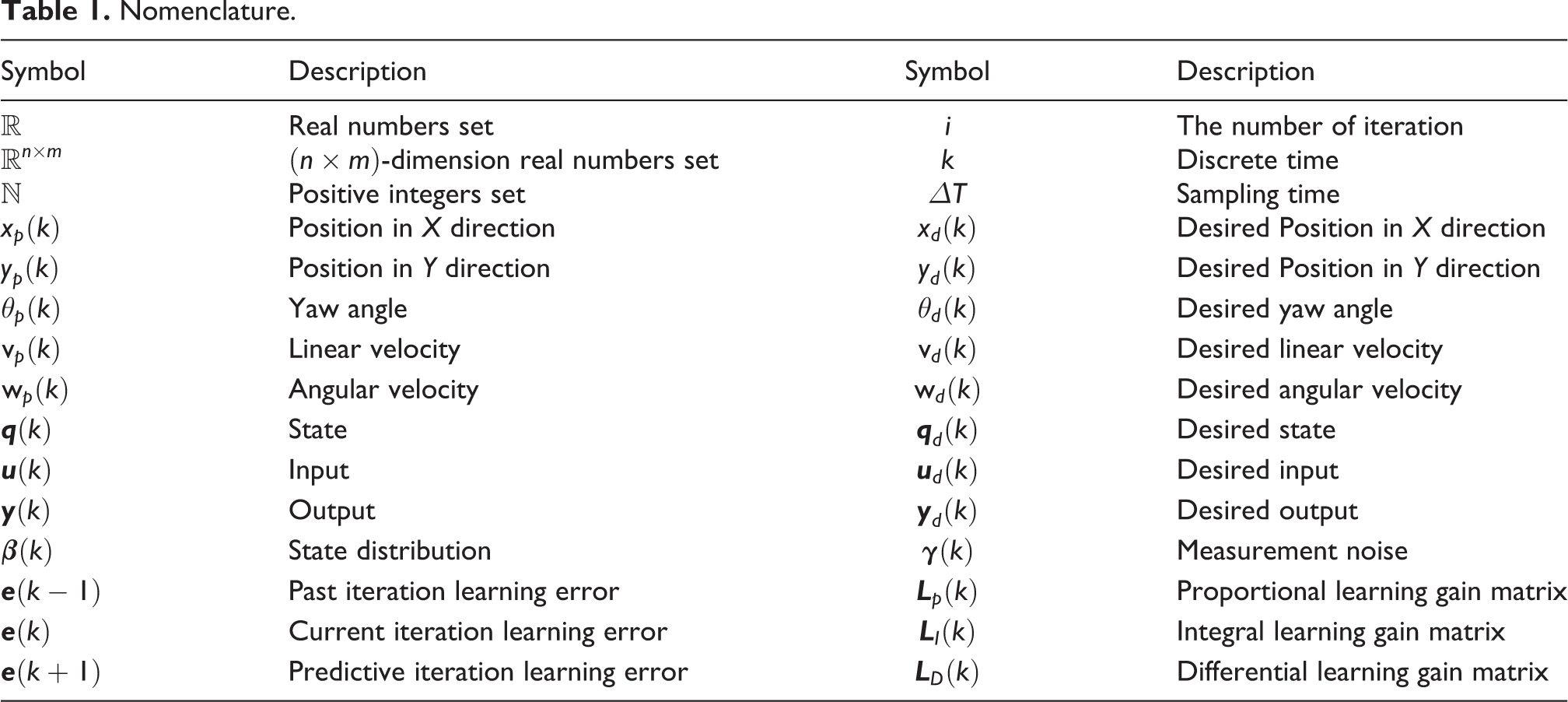
In this article, the following notations will be indicated in Table 1. In addition, some related mathematical definitions will be involved.
Nomenclature.
For a vector The α norm of a positive real function f: The
System description
A typical kinematic model of a unicycle-type tracked mobile robot is shown in Figure 1. The steering motion of the differential tracked robot is realized by controlling the relative speed of tracks on both sides. In order to simplify its kinematic model, three assumptions are made: Three is no idling phenomenon when the tracked robot moves, and it is in contact with the ground completely; The mass distribution of the tracked robot body is uniform, and the center of the mass is located on the geometric longitudinal symmetry line of the robot, that is, the geometric center point and the center of mass coincide; The slippage rate of track–ground interaction is not considered, that is, the lateral slippages on both sides of the tracks are zero.

Motion model of a tracked mobile robot and its trajectory tracking issue.
The tracked robot moves in a 2D workspace, and the representative point and the desired trajectory of the robot are denoted as
For the representative point

where
Let


where
The motion equations (2) and (3) satisfy the following properties and assumptions. 16
Property 1
The desired trajectory can be considered as ideal motion of the tracked robot, that is


where
Property 2
The matrix function

for all
Property 3
The matrix
Assumption 1

Assumption 2
The disturbances item

for some b β > 0 and b γ > 0.
Assumption 3
For all iteration operations, the initial state of the trajectory is within a neighborhood of
Controller design and convergence analysis
Algorithm design
We propose a discrete-time open-closed-loop PID-type ILC algorithm for trajectory tracking of TMRs, namely

where

It is worth emphasizing that the subscript i and i+1 denote the former and current iterations, respectively. For the ith iteration,
The framework of the entire control scheme using the proposed ILC algorithm is shown in Figure 2.

A kinematic trajectory tracking control scheme using the proposed ILC algorithm for the tracked mobile robot. ILC: iteration learning control.
Convergence analysis
In the section that follows, we will provide rigorous theoretical analysis for the convergence of the proposed ILC algorithm that applied in trajectory tracking of TMRs.
Theorem 1
Let us consider the discrete-time nonlinear system denoted by equations (2) and (3). If the system satisfies Assumptions 1–3, the following inequality can be true for all

If the state disturbances, output noises, and initial state errors are ignored, that is,
Define 1
The α norm of a function f with positive real:

Proof
The state error equation can be obtained by subtracting (4) from (2), that is,

Considering Properties 2 and 3, Assumptions 1 and 2, the equation (13) satisfies the following inequality

Let

By recursion of inequality (15), and considering Assumption 3, we can get

From (9) and (13), we can get the current control input error as

where

Let

Substituting (11) and (16) into (19) gives

Multiply both sides of (20) by

Taking
That is to say

Because





Let

where


By recursion from (29), we can get

Let us select

Similarly, the both sides of the inequality (16) multiplied by

Since

Substituting (33) into (35) gives

Next, from (3) and (5), we can get

and multiplying both sides of (37) by

Substituting (36) into (38), we give

Consequently, from (33), (36), and (39), we can draw the conclusion that when
Simulations and experiments
To compare the tracking performance of the proposed open-closed-loop PID-type ILC algorithm with that of the PID-type ILC algorithm, 26 several numerical simulations and physical experiments are carried out. In the simulations, two typical trajectories that circle and cosine curve and two ILC algorithms are executed on the MATLAB R2018b platform which runs on a laptop with Intel i5-8265U CPU @ 1.80 GHz. Then, the same two tracking trajectories and the two ILC algorithms are performed on a tracked mobile robot that is equipped with Ubuntu 18.04 with ROS (Robot Operating System).
For the discrete kinematic system (2) and (3), we assume that the initial state error of the control system in each iteration is zero, that is,
Simulations
Circular curve
The discrete-time equation of the circular trajectory is

The tracking process of the circular trajectory with increasing iterations. (a) The tracking process using PID-type ILC algorithm; (b) the tracking process using open-closed-loop PID-type ILC algorithm. ILC: iteration learning control.

The tracking effect of the circular trajectory in the last iteration. (a) The tracking effect using PID-type ILC algorithm; (b) the tracking effect using open-closed-loop PID-type ILC algorithm. ILC: iteration learning control.

Convergence process of state errors with increasing iterations for the circular trajectory. (a) Max absolute errors of the x direction; (b) max absolute errors of the y direction; (c) max absolute errors of the yaw angle.
Cosine curve
The equation of the cosine trajectory is

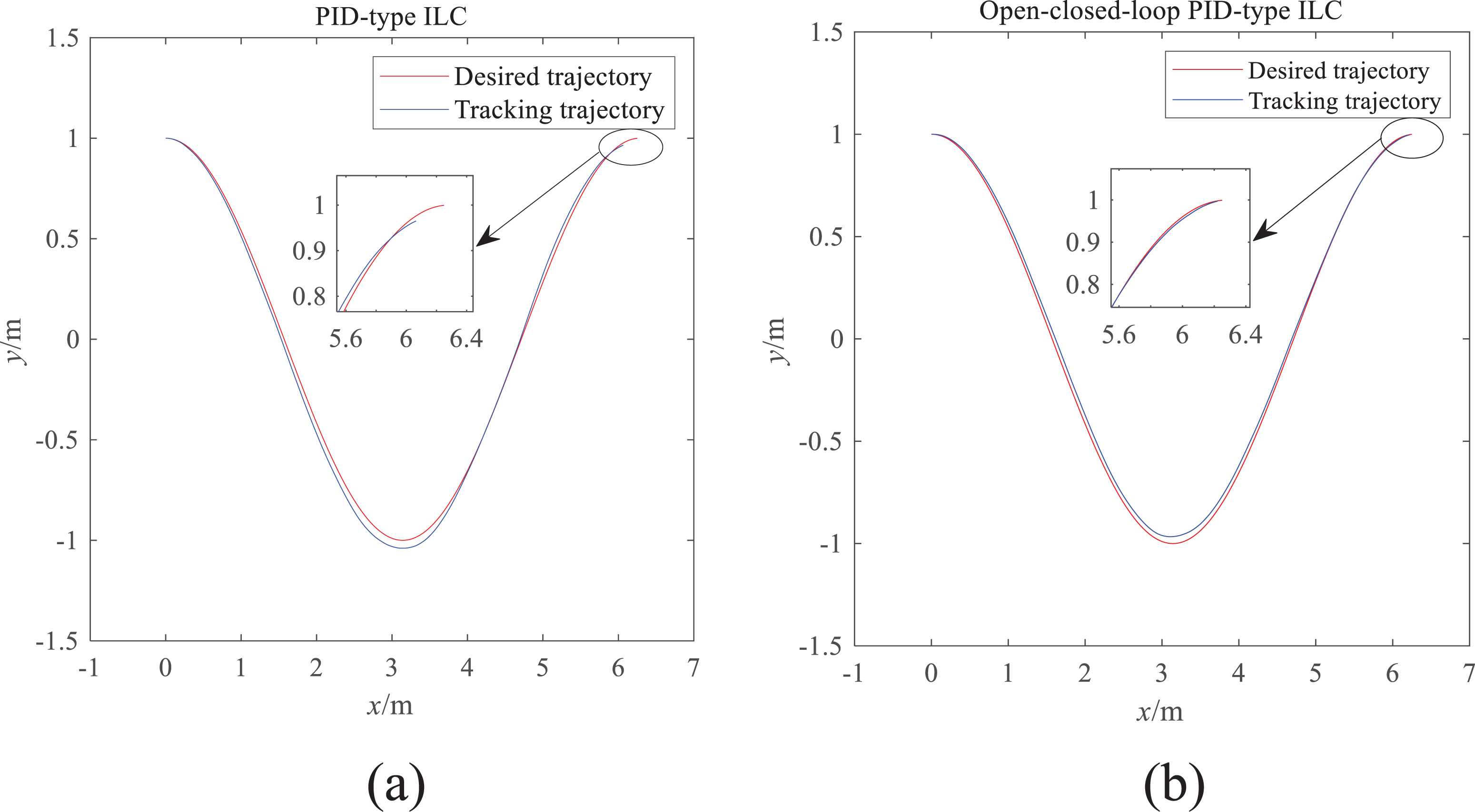
The tracking process of the cosine trajectory with increasing iterations. (a) The tracking process using PID-type ILC algorithm; (b) the tracking process using open-closed-loop PID-type ILC algorithm.

The tracking effect of the cosine trajectory in the last iteration. (a)The tracking effect using PID-type ILC algorithm; (b) the tracking effect using open-closed-loop PID-type ILC algorithm.

Convergence process of state errors with increasing iterations for the cosine trajectory. (a) Max absolute errors of the x direction; (b) max absolute errors of the y direction; (c) max absolute errors of the yaw angle.
As we can see from Figures 4 and 7, the tracking trajectories using the two ILC algorithms can converge to the given circular and cosine trajectories in the last iteration, but we can see from Figures 3 and 6 that the tracking effects of the proposed ILC algorithm are better than that of another algorithm as the increasing of the iteration numbers. For a more detailed tracking comparison results of the two algorithms, one can refer to Figures 5 and 8, from which it is not difficult to see the proposed open-closed-loop PID-type ILC algorithm is superior to the PID-type ILC algorithm in terms of convergence speed and tracking accuracy. Meanwhile, it can be found that the proposed algorithm has smaller tracking errors as well as faster convergence speed in the whole iteration process and achieves complete convergence after 50 iterations. On the contrary, the traditional PID-type ILC algorithm has larger tracking errors as well as slower convergence speed and can be completely converged after 200 iterations. In addition, the state errors of the two algorithms are shown in Table 2, from which we can see that the tracking performance of the proposed ILC algorithm is better than PID ILC algorithm, in which for the robot tracking the desired circular curve, and the maximum absolute error in the x direction decreased by 39.87%, in the y direction decreased by 45.83%, and in the yaw angle decreased by 52.26%; in which for the robot tracking the desired cosine curve, and the maximum absolute error in the x direction decreased by 58.84%, in the y direction decreased by 55.53%, and in the yaw angle decreased by 51.43%.
The comparison of the maximum absolute errors of two learning algorithms in the last iteration of the simulations.

The above simulation results show that the actual motion trajectories of the robot using open-closed-loop PID-type ILC algorithm can better track the given expected trajectories through fewer iterations than that using the PID-type ILC algorithm. In addition, the tracking accuracy using the proposed algorithm is superior to another algorithm in the presence of disturbances and noises.
Experiments
To further indicate that the proposed ILC algorithm is effective and feasible, a crawler-type mobile robot, as shown in Figure 9, is used as an experimental object to test the tracking effect of the two ILC algorithms on the above two curves. When the robot and computer are in the same WLAN (Wireless Local Area Network), the communication between the two can be realized. For the tracked mobile robot, a Jetson Nano B01 is used as ROS upper controller and a STM32F103VET6 as the bottom controller; each of the two driving wheels is equipped with a high-resolution photoelectric encoder which provides odometry data, and then the obtained IMU (Inertial Measuring Unit) data and odometer data are fused in the EKF (Extended Kalman Filter) fusion algorithm, and finally the real-time pose of the tracked robot is obtained. We take the real-time pose of the robot and the desired trajectory as the input of the above two ILC algorithms, and then calculate the linear and angular speeds of the robot in real time, and finally convert it into the speeds of the left and right driving wheels to realize the motion of the robot. 27

Structure diagram of a crawler-type mobile robot using ILC algorithm.
Circular curve
The equation of the desired circular trajectory and the parameters in the physical experiment are the same as that of simulation in the “Circular curve” section. The whole motion views of the robot are recorded, parts of which are shown in Figure 10. Then, the experimental results of the robot tracking circular curve are shown in Figures 11 and 12. As we can see from Figure 11, the robot using the two ILC algorithms can track the desired circle trajectory but have a certain error owing to the influence of disturbances, noises, and other uncertain factors. For more detailed comparison results of the two algorithms, one can look at Figure 12, from which it is easy to see the tracking accuracy of the proposed algorithm is superior to the PID-type ILC algorithm because the tracking errors are generally smaller.

The motion views of the crawler-type mobile robot tracking the circular curve: (a) t = 0s; (b) t = 10s; (c) t = 20s; (d) t = 30s; (e) t = 40s; (f) t = 50s.

The experimental results of two algorithms tracking a circular trajectory. (a) The tracking effect of the robot using PID-type ILC algorithm; (b) the tracking effect of the robot using open-closed-loop PID-type ILC algorithm.

The state absolute errors of the robot tracking the circle curve in the last iteration: (a) The absolute errors of the x direction; (b) the absolute errors of the y direction; and (c) the absolute errors of the yaw angle.
Cosine curve
We also test the tracking effect of the two algorithms on the cosine curve, and parts of the motion views are shown in Figure 13, which show that the motion trajectory of the robot is in accordance with the desired cosine curve. In addition, we can see from Figure 14 that both algorithms can track the desired cosine trajectory very well. The tracking effect of the two algorithms can be seen in detail in Figure 15, from which it is easy to find out that the tracking errors of our proposed algorithm are also smaller than that of the PID-type ILC algorithm.

The motion views of the crawler-type mobile robot tracking the cosine curve: (a) t = 0s; (b) t = 10s; (c) t = 20s; (d) t = 30s; (e) t = 40s; (f) t = 50s.
The experimental results of two algorithms tracking a cosine curve. (a) The tracking effect of the robot using PID-type ILC algorithm; (b) the tracking effect of the robot using open-closed-loop PID-type ILC algorithm.

The state absolute errors of the robot tracking the cosine curve: (a) The absolute errors of the x direction; (b) the absolute errors of the y direction; (c) the absolute errors of the yaw angle.
In addition, the state errors of the two algorithms are shown in Table 3, from which we can see that the tracking performance of the proposed ILC algorithm is also better than that the traditional PID-type ILC algorithm, in which for the robot tracking desired circular curve, the maximum absolute errors in the x, y direction, and yaw angle decreased by 38.62%, 31.65%, and 23.57%, respectively; for the robot tracking desired cosine curve, the maximum absolute errors decreased by 78.28%, 46.18%, and 54.34%, respectively. Since there are more uncertainties for a real robot, the tracking errors of the robot in physical experiments are greater than that in simulations.
The comparison of the maximum absolute errors of two learning algorithms in the last iteration of the experiments.

Under the above numerical simulations and physical experiments, we can see that the simulation results are almost consistent with the experimental results for the robot tracking the desired circular and cosine trajectories. Our proposed open-closed-loop PID-type ILC algorithm is superior to the PID-type ILC algorithm in terms of convergence rate and tracking accuracy.
Conclusions
Tracked mobile robots are widely used in unstructured scenes. However, it is difficult to establish accurately mathematical models of tracked robots because of the influence of terrain environment, load change, external interference, and sensor measurement noises, as well as with time-vary, nonlinear, and strong-coupling dynamics properties. The trajectory tracking problem of the tracked robots is rather difficult to handle. In this work, an open-closed-loop PID-type ILC algorithm has been successful to solve the high-precision trajectory tracking issue of the TMRs. Compared with earlier ILC algorithms, the proposed ILC algorithm has a faster convergence rate and higher robustness.
The novel ILC algorithm adopts past, current, and predictive iteration learning errors to modify the current control input and give full play to the advantages of PID design idea, open-loop ILC, and closed-loop ILC. In addition, we provide a rigorous mathematical proof of the convergence analysis of the proposed algorithm under state disturbances and measurement noises. First, it is verified to be efficient through simulation tests under the disturbances and noises, and then on an actual tracked mobile robot platform. The results indicate that the proposed algorithm has well tracking performance for the tracked mobile robot on two typical trajectories of circular and cosine, and are better than the conventional PID-type ILC algorithm in terms of convergence speed and tracking accuracy.
However, ILC algorithms have a big disadvantage in that each iteration needs to start from the starting point of the desired trajectory to converge to the desired trajectory with increasing iterations. Therefore, in practical applications, the starting position of the robot must be placed near the starting point of the desired trajectory. In addition, the kinematic model of a tracked mobile robot established in this article is approximately a wheeled mobile robot, but the actual crawler robot is prone to longitudinal slip due to the special walking mechanism of the crawler. In the future work, the slip rate of the crawler robot will be considered, and the corresponding controller will be designed and the slip rate will be estimated.
Footnotes
Acknowledgments
The authors would like to thank Beijing Key Laboratory of Metro Fire and Passenger Transportation Safety, China Academy of Safety Science and Technology, for providing project funds.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received financial support for the research, authorship, and/or publication of this article: This research work was funded by Science and Technology Project of Fire and Rescue Bureau of Emergency Management Department under Grant No. 2020XFZD15; Beijing Chaoyang District Collaborative Innovation Project under Grant No. CYXC2208.