
Abstract
This article is dedicated to solving the problem of predefined-time cooperative control for autonomous surface vessels encountering model uncertainties and external perturbations. By virtue of the prescribed-time stable theory, a robust formation controller is constructed, with which the settling time of the cooperative system can be prescribed in advance. The controller is developed under the backstepping framework, where the dynamic surface control is applied to generate the real-time command. Considering the unmodeled autonomous surface vessel dynamics, the neural network-based nonlinear approximator is incorporated with minimum-learning-parameter technique. Under this scenario, the real-time control can be pursed with one parameter being estimated. Finally, comparative simulation examples are provided to exhibit the effectiveness and advantages of designed control strategies.
Keywords
Introduction
In the past, formation control has become a hot topic in the ocean engineering industry and been known as one of the most promising technologies. Compared with the single vehicle, formation enjoys a variety of appealing features for ocean surveillance, resource detection, and geochemical sampling, to just name a few. However, the ever-increasing complexity of marine missions and fragile onboard devices render it a tough work to devise cooperative controller. To overcome these obstacles, numerous methods have been resorted to, involving backstepping methodology, 1 –3 neural networks (NNs) control, 4 –7 and adaptive control. 8,9
Although there is substantial research that has been undertaken, the problem of model uncertainties is fundamentally ignored in the studies of Fu and Yu 10 and Xiao et al. 11 Considering the imprecise model parameters, extensive uncertainties are usually resident in autonomous surface vessels’ (ASVs) model dynamics. To enhance ASV systems’ adaptation, adaptive control approaches, 7,12,13 NNs, 14,15 and observer technologies 16 –18 were widely employed. For the path-following problem of a single surface vessel, Wang et al. 19 revisited the above problem via a novel adaptive-based NNs strategy, which possesses the disadvantage of enormous weight matrix to be estimated. To obtain less computation burden, Lu et al. 6,7 proposed minimum-learning-parameter (MLP)-based control strategies for multiple ASVs to reinforce the robustness despite of uncertainties. However, it still needs further investigation on how to solve the time-consuming problem of NNs for formation systems.
It is somewhat defective that only the asymptotical stability was achieved in the majority of foregoing mentioned approaches. Compared with the asymptotical controller, 20,21 the unique character of finite-time control lies in the fast response. 22 –26 However, the positive correlation between the initial states and convergence rate renders it no more practical to some extent. This calls for the appearance of the fixed/predefined-time control. 17,27 –29 In this regard, a new-type of performance function with predefined-time convergence is introduced by Wang et al., 30 and Zhang et al. 31 have investigated a fixed-time tracking control for a family of ASVs with a novel bounding function. Nevertheless, one notable caveat is that the problem of “complexity explosion” in backstepping is not considered in the study by Zhang and Yang. 31 With this in mind, there still needs research on the backstepping control problem considering “complexity explosion.”
Motivated by the above observations, a predefined-time distributed cooperative controller for ASV formation is constructed in this article. Comparing to the current literatures, the main contributions of the proposed controller are summarized as follows:
Compared with the existing finite-time and asymptotic control methods, 7,13,20 predefined-time stability of the closed-loop signals is effectively ensured under the backstepping framework, which means that the formation achieves the asymptotic tracking with prescribed-time performance.
The unmodeled ASV dynamics are well addressed with radial basis function neural networks (RBF NNs). Simultaneously, the excessive time-consuming defect of NNs is well modified synthesizing with the MLP algorithm, by which the estimation dimensions of online parameters decrease.
In the existing adaptive controllers for formation issues, 4,6,23,32 the centralized framework is deployed. Totally different from such strategy, a weighted directed graph is introduced into the controller design process to circumvent the single-point failure.
The remainder of this article is structured as follows. The mathematical model and the interact topology of ASVs formation are described in the second section. The cooperative controller with corresponding stability analysis and control performance are given in the third and fourth sections, respectively. Finally, conclusions are drawn in the last section.
Preliminaries and problem formulation
Interaction graph
Consider a group of N fully actuated ASVs in
Lemma 1
The Laplacian matrix
Mathematical model of the ASVs
For a group of ASVs suffering from external disturbances, the mathematical model of the

where the
Function approximation based on RBF NNs
Lemma 2
For any given real continuous function

where n is the dimension of the input vector, p is the number of neurons, ε is the bounded function approximation error, and

where
Notations
Throughout this article,
Control objective
Consider a group of N fully actuated follower ASVs and a directed interaction graph

where Tc
is the user-defined settling time,
Assumption 1
For the reference trajectory
Assumption 2
The external disturbances possess an upper bound, that is,
Lemma 3
For any scalar

Lemma 4
The following inequality holds true for any given vector

Lemma 5
For the nonlinear system (1), if the radially unbounded Lyapunov function

with
Lemma 6
The first-order filter defined in the study by Lu et al. 7 is employed here to obtain the filtered virtual command, which is described as the following equation

where

Controller design
This section focuses on designing a controller for the ASV formation using the directed graph theories, NNs approximation, and backstepping design. By virtue of prescribed-time theory, the tracking missions can be completed while maintaining desired formation shape. The design process could be divided into two parts, that is, the virtual commands design and the nominal controller design, as shown in Figure 1.

The schematic diagram of the proposed strategy.

where

Then, we define the cooperative tracking error as

Here,

where

Thus, based on the foregoing simplification and the interaction graph, the virtual command is rearranged in a compact form as

where

By the application of equations (9), (11), (12), virtual command (15), and Lemma 6,

Since

The guidelines about the parameter turning are intuitively exhibited in equation (18), from which one can deduce that

Remark 1
Compared with the coordinated controller proposed in the study by Lu et al.,
7
the main superiorities of equation (15) can be pursed in that the prescribed-time stability can be achieved for

Considering the fact that

where

where

For convenience, we define

where

Additionally, estimation errors of

Remark 2
Control parameters

Obviously, chattering phenomenon is inevitable attributing to the discontinuous term
Remark 3
In equation (25), these adaptive updating laws are structured to provide upper bounds for
Theorem 1
For the formation system (1) under Assumptions 1 and 2, if the enlarged graph
Proof
The illustration of the prescribed-time stability will be carried out in two steps, that is, to prove the uniformly ultimately bounded of estimation errors, and then to demonstrate the prescribed-time stability of tracking errors

By resorting to equation (23) and the designed controller in equation (24), the derivative of equation (28) is calculated as the following expression

Combining with

For estimation variables

Upon the employment of equation (31),

Since the parameters γ and p defined in Lemma 5 satisfy
where
Remark 4
Since the filtering error
Then, we introduce the following Lyapunov function to validate the designer-appointed convergence of formation errors

Benefiting from equations (18), (21), and (32), the time derivative of V 4 can be readily calculated as

where
Remark 5
Upon the employment of the devised prescribed-time control architecture, fast system response and high reliability are acquired when compared to the existing formation methods.
7
Specifically speaking, the control architecture
Simulations
In this section, numerical simulation examples are presented for the purpose of illustrating the appealing performance of the devised controller. The simulations are implemented on the MATLAB R2018a platform using a fixed-step Runge–Kutta solver (100 Hz). Suppose that the ASV formation consists of three follower ASVs and a virtual leader, which is arranged as shown in Figure 2.

The interaction topology of ASVs. ASV: autonomous surface vessel.
The simulation system is mainly composed of five portions, including (1) ASV model, (2) control module, (3) adaptive module, (4) RBF NNs, and (5) external disturbances. Under the controller expressed as equation (24), the formation system governed by equation (1) is able to keep three followers tracking a virtual leader while remaining a predefined formation shape despite the impact of the external perturbations. To achieve this control objective, control parameters are strictly selected. For fair comparison, the adaptive cooperative formation controllers proposed in the studies of Lu et al. 7 and Huang et al. 34 are simulated additionally under the same condition. Parameters of the formation system are adopted as the same as in the study of Lu et al., 7 that is, the mass of each ASV is 23.8 kg with its length being 1.255 m and width being 0.29 m. The external disturbances of the three dimensions are presented as

The trajectory of the leader vessel is given as
Control parameters.

Simulation results of the prescribed-time controller
Simulation results under the proposed adaptive prescribed controller (24) are shown in Figures 3
–6 as prescribed time

Formation trajectory of ASVs in x–y plane (a) and the corresponding tracking errors
Filtering error
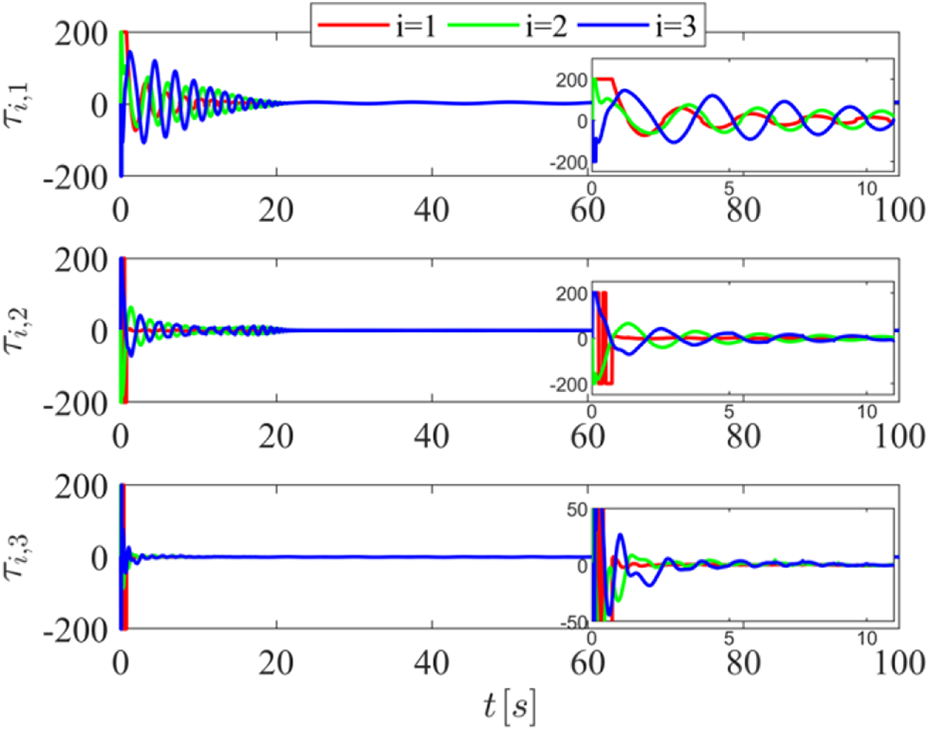
Control torque

Estimation variables
Control torques and estimation variables are presented in Figures 5 and 6, respectively. From these results, we have found that smooth control command will be deduced by this controller and all the estimated valuables will remain bounded. It follows from these related pictures that trajectory tracking and configuration remaining are fulfilled with satisfactory performance in prescribed time when the devised control scheme takes effect.
Comparative simulation results
For a better presentation of the high reliability and fast response ability of the devised controller in this article, comparative simulations are conducted in this subsection. Since the works of Lu et al. 7 and Huang et al. 34 are both about the cooperative formation control of multiple ASVs against the time-varying environmental disturbances, they are therefore deemed as the appropriate comparative examples. Lu et al. 7 proposed a disturbance-rejection controller, while a finite-time control strategy for multiple ASVs was proposed in the study by Huang et al. 34 To illustrate the robustness of the proposed control protocol, the following three types of piecewise disturbances are utilized to imitate the ocean waves and winds, which can be expressed as follows:
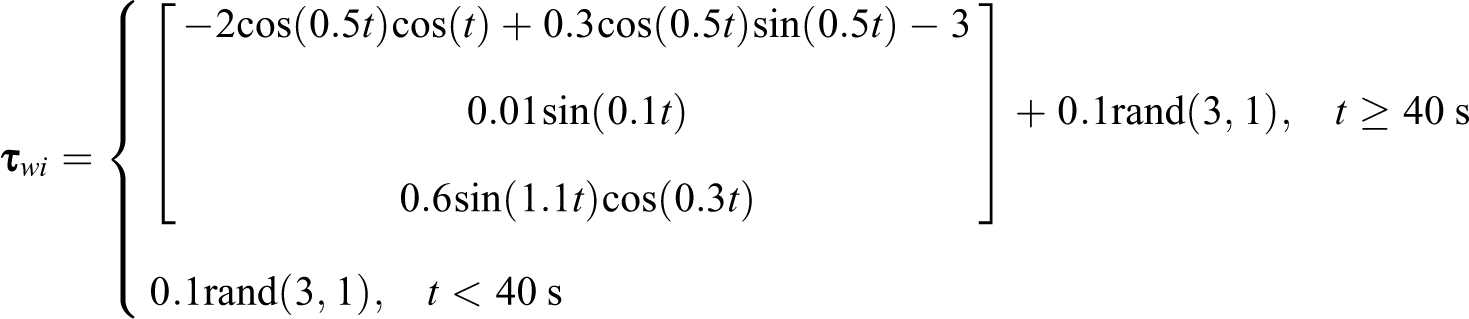


where
Simulation environment and ASV models are directly inherent from previous subsection, involving the same initial states and disturbances under
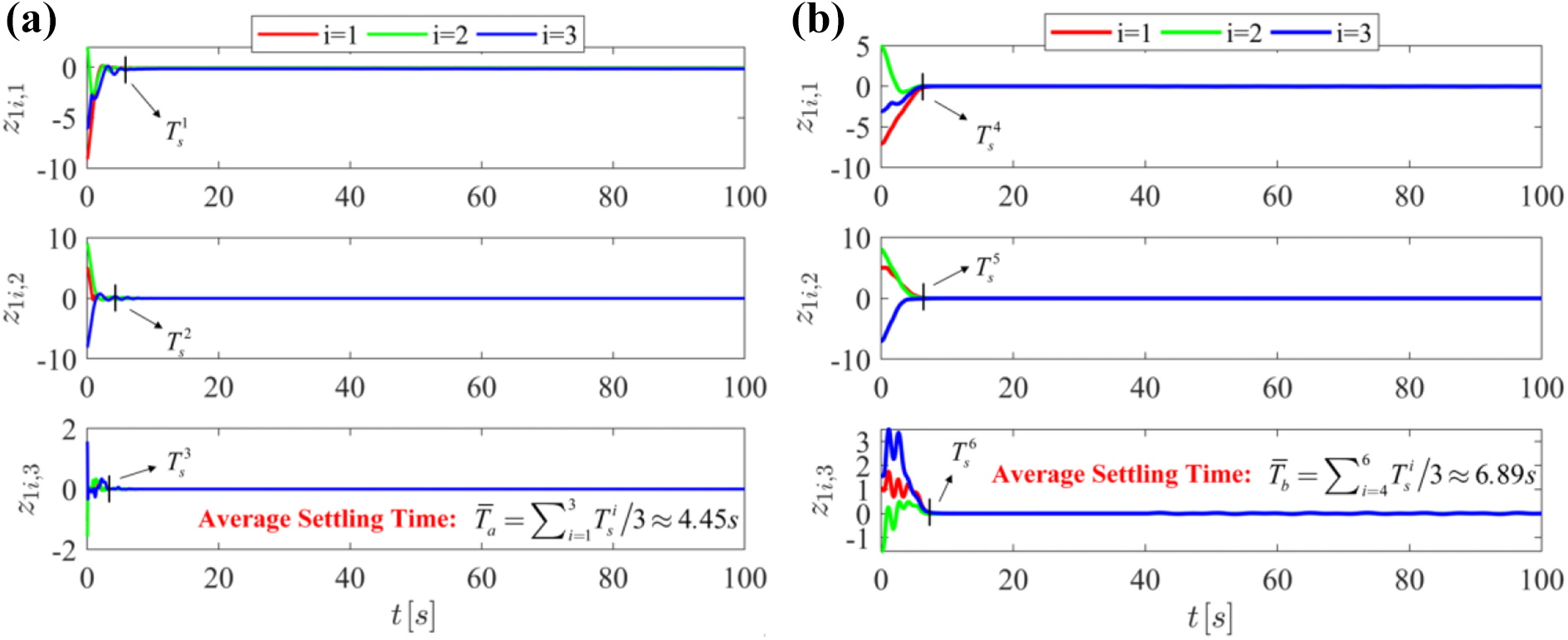
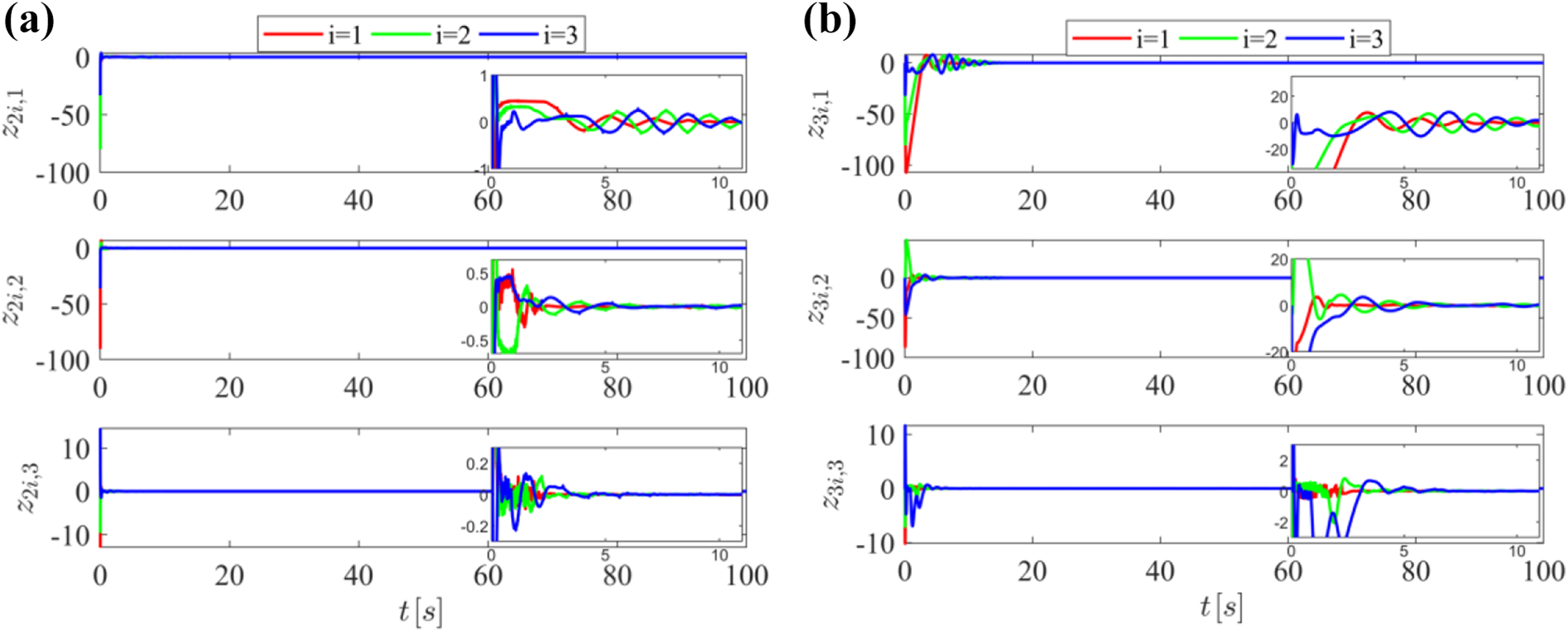
Formation error
Observing the average settling time

Formation error
As seen from Figure 9(a), the output of controller in the study by Lu et al.
7
under

Control torque
Conclusion
In this brief, the predefined-time tracking control problem is addressed for multiple ASVs exposed to model uncertainties and external perturbations. Three unique features distinguish the devised algorithm from the existing ones are: (i) The predefined-time control protocol is developed, which augments the feasibility of the proposed strategy. (ii) The adverse impact enticed by external disturbances is tackled considering “explosion of terms.” (iii) Rapid system response is provided with MLP algorithm. Since the tracking accuracy is purely characterized by the designed parameters, future work will be dedicated toward removing this constraint in a user/designer-friendly way.
Footnotes
Appendix 1
Some of the related nomenclatures are given in Table 1A.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was co-supported by the Fundamental Research Funds for the Central Universities (GK2010260307, GK2010260338), Science and Technology on Underwater Vehicle Laboratory under Grants 6217905300000870562 and JCKYS2020SXJQR-03, the China Postdoctoral Science Foundation funded project (No. 2020M681081), the project supported by Hei Long Jiang Postdoctoral Foundation (No. LBH-Z20130).