
Abstract
Sea cucumber fishing is an important application of underwater robots. In order to realize the function of sea cucumber fishing, an underwater robot system for sea cucumber fishing is designed, which can reduce operation requirements and costs while realizing sea cucumber fishing. The overall system plan includes the design of subsystems such as power supply system, fishing system, transmission system, propulsion system, balance and positioning system, and anti-collision airbag. According to the actual needs of sea cucumber fishing, the mechanical structure and size of each subsystem are designed, and SolidWorks is used to complete the three-dimensional modeling of the overall system. The sliding mode control and adaptive sliding mode control algorithms are used to compare the positioning control effects of the underwater vehicle to verify the effectiveness of the system design.
Keywords
Introduction
Sea cucumber has been known as the “eight treasures of seafood” since ancient times, and its nourishing effect on human body is no less than ginseng. In addition to its health benefits, sea cucumbers are also loved for their unique taste, making them the darling of mariculture.
Meng et al. 1 mentioned in the paper that in spring and autumn, sea cucumber farmers must hire professional fishermen with professional diving equipment to fish sea cucumbers. The industry is high risk and high pay, as sea cucumber fishermen are threatened by high pressure, low temperatures, and other risks when fishing at sea. In addition, sea cucumber fishermen can stay underwater for 30–40 min at a time and dive for 4–5 h a day. Jiansong and Yugui 2 mentioned the current situation of sea cucumber fishing. The market demand of sea cucumber is rising rapidly, and the prospect is very broad. The data in this article fully illustrate the trend law of current global sea cucumber harvest and cultivation yield change, which can make people think and find innovative application points. This article is to seize the gap advantage, advocate the use of professional sea cucumber fishing robot instead of expensive human labor, recommend the design of a new creative underwater robot into the fishery industry, to provide an interesting direction for the future development of the industry.
At present, underwater robot systems are widely used to complete tasks such as seabed and pipeline survey, cable maintenance, offshore structure monitoring and maintenance, and biometric acquisition/release. Underwater vehicle (underwater vehicle-manipulator system (UVMS)) equipped with underwater manipulator can complete complex underwater tasks instead of human, which has broad research prospect and engineering significance.
Antonelli 3 gives examples to illustrate the development status and research progress of different types of underwater robots and systematically expounds the modeling and control theory of UVMS. In the book, UVMS is equipped with one or more manipulators on the body of an underwater robot. The UVMSs are still under development. Marani and Yuh, Introduction to Autonomous Manipulation: Case Study with an Underwater Robot, SAUVIM, 4 studied the working state of semi-autonomous underwater vehicle for intervention (SAUVIM) in an uncertain environment and carried out relevant experimental verification work. UVMS system control technology 5 is a systematic introduction to UVMS, including UVMS dynamic modeling, coordinated control strategies and methods, and so on. In addition, some work about underwater vehicles and underwater robots also includes some content about underwater manipulator, which has certain reference significance for the study of sea cucumber fishing robot. 6 –9 In view of the research status of underwater robots at home and abroad, this article mainly designs a sea cucumber fishing robot which is applied in the field of aquatic products and equipped with a manipulator.
Eriksson et al. 10 provided data on resource users, fishing methods, governance networks, and population health classification. This article takes into account the sustainability of sea cucumber fisheries. Takagi et al. 11 designed an underwater robot to determine the size of sea cucumbers with a stereo camera, with the purpose of assisting fishermen to observe sea cucumbers and clearly judge whether the size of the target sea cucumbers conforms to Japanese laws and regulations. The sea cucumber fishing robot proposed in this article can be observed and operated. If the claw is not the right size for the target sea cucumber, the sea cucumber will slip out of the claw. This clever structural design ensures the sustainability of sea cucumber production.
Ming et al. 12 discussed key technologies such as man-machine, electricity, fluid, and intelligent recognition of underwater fishing machines based on the technical level of existing underwater robots and the specific environment of underwater fishing. Geng et al., 13 based on SolidWorks virtual design technology, carry out the overall modular design for deep-sea operation robot. This article uses this method for reference to effectively improve the efficiency of the design of sea cucumber fishing robot.
Many researchers have used professional control technology to conduct extensive discussions on the stability, path tracking, and anti-interference performance of underwater robots. Zhigang et al. 14 designed a backstepping path tracking controller based on biological inspiration in the path tracking control of underwater robots, which can effectively overcome speed jump in the tracking control of underwater robots. Shaohua et al. 15 provide a new judgment of control ability, which combines traditional methods and resistance energy to find the best control method. Different types of controllers are simulated under instantaneous and random disturbances. Fengqiang et al. 16 provide a multi-signal analysis method to guide robots to move underwater and capture seafood. Serdar Soyl et al. 17 proposed a new multi-input multi-output control law to improve the ability of remote operated vehicle (ROV) to perform tasks requiring high-precision position and speed control. According to the principle of sliding mode control, Mingjun and Zhenzhong 18 proposed a sliding mode control method combined with neural network. Bolun and Qi 19 proposed a dual-ring sliding mode controller, which effectively reduces the impact of sensor measurement noise. In this article, Lyapunov theory is used to prove that the tracking error of the control system of sea cucumber fishing robot is uniform and finally bounded. In order to solve the stability problem of the underwater robot designed to capture sea cucumbers, this article proposes a control law for the robot to achieve the best control effect and make up for the shortcomings of the traditional sliding mode control algorithm.
Underwater sea cucumber fishing robot is bound to become the future development direction of the industry instead of sea cucumber fishing personnel. Although the current underwater robot technology is mature and has experienced the actual test, the research of underwater robot with the special function of fishing sea cucumbers is a new field, so it is necessary to use the existing underwater robot technology and modify it to meet the needs of fishing sea cucumbers in the seabed.
Design of overall system of underwater sea cucumber fishing robot
The wild sea cucumbers are planted artificially in natural waters with a water depth of 15–30 m and are harvested only when they grow up to meet the commercial specifications. Wild sea cucumbers generally live in the pure seabed of about 20 m deep, as shown in Figure 1. Sea cucumbers are mostly attached to rocks, and there are various kinds of sea cucumbers with different preferences and habits, some bare, some hidden, and some drilled in sand. They live at depths of 2–40 m. The water temperature is 0–28°C and the salinity is 28–31‰. As shown in Figures 2 to 4, sea cucumbers can only be caught manually at present. Workers need to tie more than 30 kg of lead lump to the bottom of the sea to search for sea cucumbers. When a sea cucumber is found, the crew grabs it and puts it in a net. When the net is full, the crew rises to the surface and hands the net to a partner on the boat. They then continue to go into the sea and repeat the process over time. Workers only rely on tens of meters of breathing tube and contact with the shore, protection measures are not in place, so fishing accidents occur frequently, not only that, the deep sea temperature is low and the pressure is high, all of which pose a great threat to the health of workers.

The living environment of sea cucumber.

The crew dived to the bottom.

Workers grab sea cucumbers.

Workers fished out sea cucumbers.
The underwater sea cucumber fishing robot is an underwater robot that can be used to realize the special function of sea cucumber fishing. Its invention can effectively replace the artificial deep-sea fishing sinking, effectively solve the problem of labor cost and prevent artificial accidents, has a huge role in promoting the development of aquatic industry.
Its workflow is: the camera finds the sea cucumber; the propeller controls the robot to move directly above the sea cucumber; the underwater sea cucumber fishing robot adjusts posture; fishing device is put down to catch sea cucumbers; retract the fishing device and put the sea cucumbers in the storage box. In order to achieve the above goals, the overall system of the underwater sea cucumber fishing robot can be divided into four parts: fishing system, transmission system, propulsion system, and balancing and positioning system. The fishing system includes an end-effector and a mechanical arm; the transmission system includes a transmission device and a sea cucumber storage box; the propulsion system includes a propeller and a redirection mechanism; the balance and positioning system includes an attitude stabilization device and a positioning device.
20
In the design process, the above subsystems are not relatively independent but have strong coupling characteristics. It is needed to consider the relationship between them and get a relatively optimal design plan when designing. This article mainly designs schemes for fishing systems, conveyor systems, propulsion systems, balancing and positioning systems, and anti-collision airbags. The functions of each subsystem are as follows: The design of the end-effector, which can grab sea cucumber in the seabed sediment and reef; The design of the mechanical arm, this subsystem can transport the end-effector to perform the sea cucumber fishing task; The design of conveyor belt and storage box, this subsystem can collect the harvested sea cucumber together to improve the fishing efficiency; The design of the propeller, this subsystem can provide the driving force for the underwater sea cucumber fishing robot; The design of the reversing mechanism, this subsystem can change the direction of the driving force to control the direction of movement; The design of attitude stabilization device and positioning device, this subsystem can calculate the attitude and position of the underwater sea cucumber fishing robot in order to control the propulsion system; The design of airbag, this subsystem can protect underwater sea cucumber fishing robot from violent impact.
Design of the end-effector
The end-effector of the robot is the functional realization part of the robot. Currently, the two most commonly used end-effectors in the underwater fishing industry are the gripping mechanical claw and the sucking straw. 21 The bionic manipulator can simulate the process of grasping sea cucumber by hand to the maximum extent, and its progress is difficult to be matched by other end-effectors. However, the control of the end finger of the manipulator is a very complex nonlinear process, and the control strategy will become very difficult to achieve high-precision grasp, and the related design cost will be greatly increased. If a relatively simple control strategy is adopted, the precision of the finger end will be reduced. If the precision is not enough, it may cause great stimulation to the sea cucumber and stimulate its dirty escape response, which will damage the captured sea cucumber and reduce its commercial value. If the suction method is adopted, the vacuum pump is used to suck the sea cucumbers and then capture them. However, considering that sea cucumber fishing is carried out in the sea level of 10–15 m, it is difficult for the vacuum pump to effectively absorb sea cucumbers in this environment. In addition, different from the static water, sea cucumbers will escape after being stimulated. At this time, if the absorbed force is too small to escape, sea cucumbers will be damaged if it is too large. Bionic manipulator has many degrees of freedom (DoFs), so the difficulty of analysis and control is greatly increased, but if the DoF is changed to the most common two DoFs, that is, the way of grasping and improving the two claws, it can reduce the difficulty of design and successfully complete the task. The designed mechanical claw is gripper type, which can not only ensure the accuracy of grasping sea cucumber but also reduce the complexity of analysis and control. Therefore, the end actuator adopts the clamping mechanical claw.
Design of camera acquisition system
In this design, the outer side of the underwater robot’s head is equipped with a light, and the camera is placed on the transparent inner side of the underwater robot’s head. If the sea cucumber fishing robot needs to move to the vicinity of the sea cucumber, it must be able to collect sea cucumbers in the water. First, the sea cucumbers in the water collected by the camera can be image-enhanced, pre-processing is completed by filtering, and then the image segmentation is completed by edge detection, and the function of discovering sea cucumbers is finally realized.
Design of power supply system
In the overall design, the design of the power supply system is based on the principle of reducing the structural complexity and the weight of the body. Two 12VDC 100AH batteries are placed in series on the mother ship on the surface. 22 The battery supplies power to the robot system through a cable, which is connected to the power supply module in the tail compartment. The sea cucumber fishing robot system has a built-in power management module. The power module is placed in a sealed bin to ensure its normal working conditions, realize the reasonable distribution of voltage, and transmit the appropriate voltage to different drive modules. In addition, the BUCK drop is used. The voltage module performs synchronous rectification to ensure the stability when transmitting current. According to the data, its operating temperature is −40°C to +85°C, so it can work underwater for a long time. In addition, it provides protection functions such as overcurrent, short circuit, and leakage to improve the safety of this module.
Design of conveyor belt
The designed conveyor belt can move in a circular motion in the shell of the underwater sea cucumber fishing robot, requiring that the conveyor belt can hold the sea cucumber at the bottom, and when it reaches the top, the sea cucumber will fall into the storage box from the overturned conveyor belt. The conveyor belt consists of gears, a bottom plate, a baffle, and a transport gap. The bottom plate is used to store the sea cucumbers caught, and the baffle plate is used to prevent the sea cucumbers from falling when they are transported vertically. The transport gap can significantly reduce the mass of the conveyor belt, increase the robot’s controllability, and reduce energy consumption. Although the above design scheme can eliminate the complex motor control system and reduce the weight increase brought by too many motors, but it is corresponding to increase the conveyor belt control system and transmission weight. In order to reduce the total weight of the underwater fishing robot, the whole conveyor belt can be designed as a multistage conveyor belt with gaps. In this way, it is only necessary to ensure that the mechanical claw grabs the sea cucumber and enters the inner chamber, and the mechanical claw is released when the belt passes directly under the mechanical claw.
Design of attitude stabilization device and positioning device
The degree of freedom (DOF) control of the underwater sea cucumber fishing robot depends on the control algorithm to adjust. According to research, an effective attitude measurement device so far is an inertial sensor composed of a gyroscope and an accelerometer. 23 The inertial sensor can obtain the attitude information of the robot by integrating the angular velocity of the robot. After the posture information is obtained, the posture adjustment can be carried out using such as sliding membrane control, and the sliding mode control algorithm can be used to realize the positioning function of the underwater robot. 24 Moreover, the problem whether robot can maintain its own balance under strong external interference is not considered. This problem can be solved by designing a medium-pressure water tank similar to a submarine. Once the balance state of the robot is broken, the water tank can adjust the state of the robot to restore the balance by pumping or sucking water.
Design of airbag
Since sea cucumbers live mostly in crevices in the rocks, the robot needs to crawl between rocks on the seafloor to grab them. This puts the robot at risk of collision with rocks and damage. Therefore, the design of the underwater fishing robot includes four cylindrical hollow plastic airbags distributed on the four sides of the robot. The design of the airbag can not only reduce the water resistance but also provide certain buoyancy to offset part of the gravity of the robot to reduce the output power of the propeller.
Design of sea cucumber fishing robot subsystem
The functions of the entire system and the framework of the system are presented above. In order to complete the task of fishing sea cucumbers, it is necessary to analyze the advantages and disadvantages of the existing fishing schemes and choose a more appropriate scheme for each system. When designing the system, the principle is that the design of each function of the system can meet the sea cucumber fishing task and can achieve high efficiency and low cost as much as possible. In order to complete the task of fishing sea cucumbers, reasonable subsystems are combined to complete the overall system design. When designing each subsystem, it is necessary to pay attention to maximizing the utilization of the internal space of the fishing robot system. 25
Design of fishing system (mechanical claw)
If the mechanical claw wants to catch sea cucumbers, it must first meet the conditions that the open width of the claw can be used to catch the sea cucumber and the closed width to be able to clamp the sea cucumber. Considering the average length, width, and height of cultured sea cucumber are 10–20 cm, 4–6 cm, and 5–8 cm, respectively, the maximum opening width of the design claw is 6 cm, the closing width is 4 cm, the claw length is 8 cm, and the height is 10 cm. In addition, considering that seawater will reduce the friction of the sea-participating claws, anti-slip patterns are added to the gripping parts of the claws to increase the friction to prevent sea cucumbers from escaping. In addition, sea cucumbers live in stone crevices. A 45° dip angle shovel structure is added to the lower part of the hand claw for the convenience of clamping. The structure can effectively scoop up the sea cucumber and hold the sea cucumber to prevent it from falling after grabbing. The design diagram of the mechanical claw is shown in Figures 5 and 6.

Closure dimension of mechanical jaw.

Opening dimension of mechanical claw.
The opening and closing control of the claws uses two gears meshed together, so that only the movement of one claw can be controlled to control the other claw. In addition, if the mechanical claw is to grab the sea cucumber, the length of its claw should be parallel to the length of the sea cucumber. This requires that the mechanical claw can rotate 360° in the horizontal direction to adjust the position, so a motor that can rotate in the horizontal direction is needed to realize this function.
The design of the robotic arm
The task of the robotic arm is to flexibly retract and retract the mechanical claws. Considering the influence of seawater buoyancy and submarine currents, the multi-DoF manipulator is beneficial for the mechanical claw to flexibly grasp the sea cucumber in all positions. The robot can calculate the end pose according to the joint angle, so as to realize the trajectory planning of the mechanical gripper. At the same time, in order to place the mechanical claw at the determined position of the sea cucumber, the joint angle can also be calculated by the end pose. The design of the robotic arm is shown in Figure 7.

The design of the robotic arm.
Design of conveyor system
Conveyor belt is divided into four conveyor belt and four gap structure to minimize weight and improve work efficiency. If the conveyor belt is too small to catch the second sea cucumber before the first one is sent into the box, then there will be no extra conveyor belt to transport the second sea cucumber, which will cause a waste of time; too many conveyor belts will not reduce weight effectively. The control strategy of the conveyor belt is that the gap should appear under the mechanical claw when the arm is lowered, and the conveyor belt should be under the mechanical claw when the arm is retracted to receive the sea cucumbers caught. The conveyor belt is 20 cm long and 10 cm wide and has a semicircular device on the wide edge. The device can hold the sea cucumber when the belt moves vertically to prevent it from falling, and flip it when the belt moves over the container to dump the sea cucumber into the container. The design of the semi-arc conveyor belt should consider that the centroid of sea cucumbers can fall into the inside of the arc in the vertical direction to prevent falling, and the centroid is outside the arc to make sea cucumbers fall when it comes to the top of the storage box. Therefore, the diameter of the arc is designed to be 5 cm. The transmission design is shown in Figure 8.

Design of conveyor belt.
The conveyer belt transportation mode can be regarded as the movement mode of bicycle chain driving wheels. There are grooves at the lower part of the conveyor belt, and a circle of chain is outside. When the chain moves, it will drive the conveyor belt to move, and the conveyor belt will stop when it stops. The movement of the chain is driven by four motors at four corners. According to the size of the fishing device and the storage box, the external rack of the conveyor belt is 65 cm long and 55 cm wide. The rack design is shown in Figure 9.

Design of rack.
Encapsulation and working principle design
The shell of the underwater sea cucumber fishing robot is shown in Figure 10. After the core part is assembled, the shell is designed with the most common streamlined design. Four airbags are installed on the four ridges of the shell to protect the robot from collision and provide a certain buoyancy.

Shell of underwater sea cucumber fishing robot.
The cross-sectional view of the internal mechanical structure of the sea cucumber fishing robot is shown in Figure 11. Its working principle is that when the camera in the transparent head cabin finds the sea cucumber, it sends a reminder to the upper computer, and the operator on the ship observes the real-time picture in the upper computer. After confirming that the screen is sea cucumber, open the mechanical warehouse and release the manipulator to carry out fishing activities. After confirming the capture, retract the manipulator, close the hatch first, and then release the manipulator. The sea cucumber will automatically land on the conveyor belt and move counterclockwise through the conveyor belt before dropping into the storage tank. The power supply system, control system, and positioning device are located in the rear sealed cabin of the underwater robot. The wires connecting the head camera and the rear sealed cabin are placed in the sealing thin layer between the top and the side. This design allows the underwater fishing robot to operate normally. It also has good air tightness.
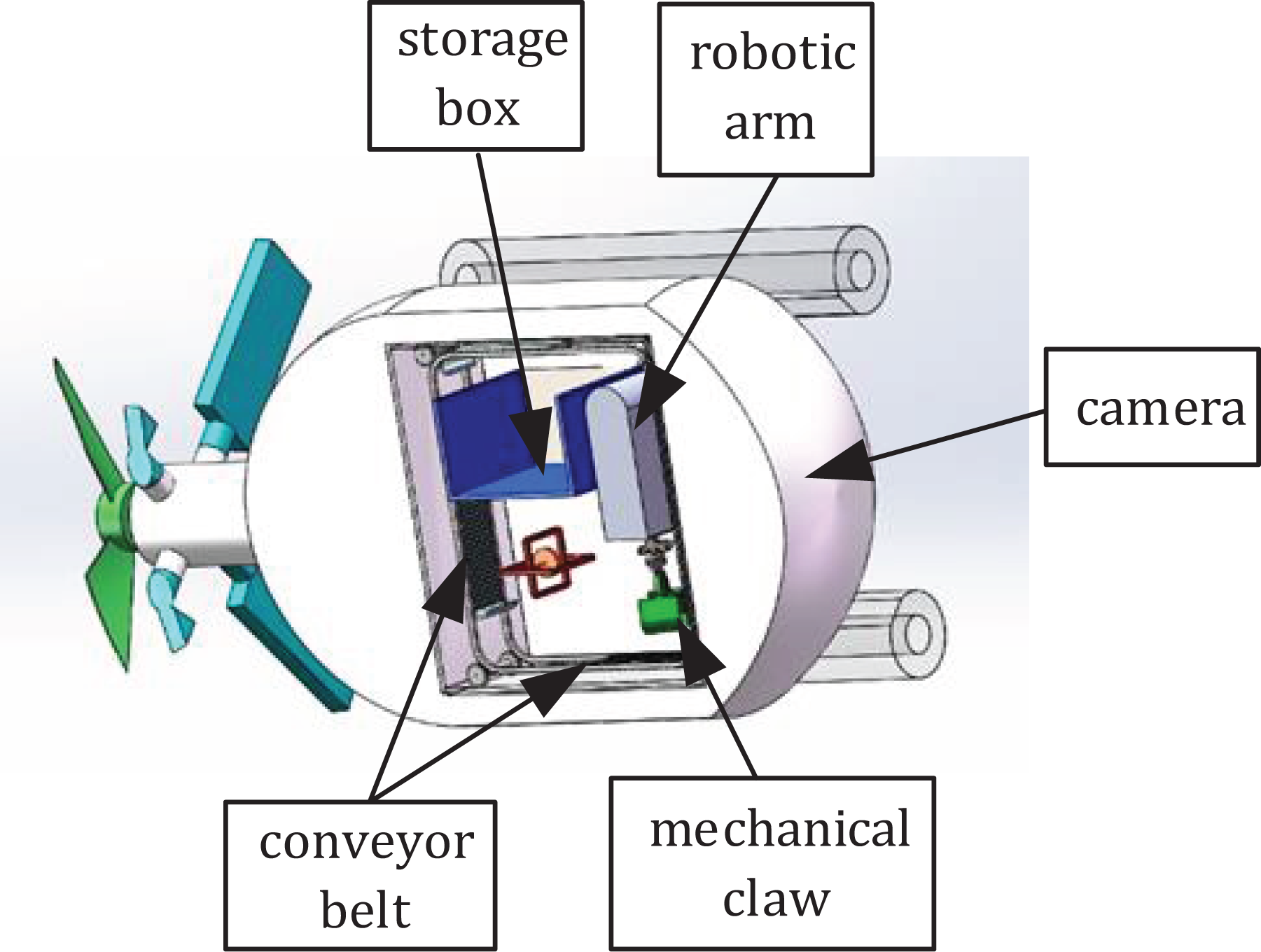
Sectional view of underwater sea cucumber fishing robot.
Adaptive sliding mode control algorithm
The system uses adaptive sliding mode control algorithm to locate, which involves the establishment of the dynamic model of underwater robot and the design of the slip mold surface. 26 The meanings of the parameters recommended by the International Tank Conference (ITTC) and the Society of Shipbuilding and Marine Engineering (SNAME) Term Bulletin are shown in Table 1A (see it in the Appendix 1).
The assumptions that have been made for the dynamics of the sea cucumber fishing robot are listed in the following:
Sea cucumber fishing robot is assumed to be hydrodynamically symmetrical about 6-DoF. Accordingly, the motions between DoFs of the vehicle in hydrodynamic can bedecoupled.
cucumber fishing robot is assumed to operate below the wave-affected zone. As a result, disturbances of waves on the vehicle are negligible.
Underwater currents are constant or nonexistent. Therefore, the equation is given in terms of the vehicle velocity ν.
Based on Euler–Lagrangian formulation, the dynamic model of the underwater robot for sea cucumber fishing under the condition of still water is deduced as follows 27

In the case of underwater interference

where M is the inertia matrix of the sea cucumber fishing robot;
(For the specific meaning of the above variables, please refer to formulas (1A) to (1E) in the Appendix 1.)
where m = 26.2 kg and I is the moment of inertia of sea cucumber fishing robot.
Inertial parameter.

Primary damping coefficient.

Secondary damping coefficient.

The basic variable relationship of the design control law




here,
Where the expected value is

here,



here,
The stability of the system is carried out by using the second method of Lyapunov

To verify the stability of the system, you must verify




Adaptation law

assuming that

Assuming that disturbance
Similarly, when the disturbance
Dynamic positioning simulation of underwater positioning device
Underwater positioning system needs real simulation of the real underwater environment, including setting density, quality numerical calculation buoyancy of water, underwater robot in grasping the sea cucumber target, first of all to ensure the positioning device in the exact position, let the fishing head on sea cucumber target, the stability of the second positioning device needs certain to devolve manipulator grasping the sea cucumber. If affected by the environment, the angle around X-, Y-, and Z-axis is not stable, it will directly lead to the robot rolling in the sea, unable to realize the underwater grasping activities.
The specific task requirements are that the designed sea cucumber fishing robot can hover stably in the water to prepare for the subsequent operation of sea cucumber fishing. After confirming the arrival of the underwater robot body at the specified position, the mechanical warehouse is opened and the manipulator is released for fishing activities.
Perform fixed-point control experiments on positioning devices based on sliding mode control
The default initial position is x = 0 m, y = 0 m, and z = 0 m; set the target position x = 5 m, y = 5 m, and z = 10 m; control the underwater positioning device from the initial position to the target position and hover after reaching the target position.
As can be seen from Figures 12 to 14, the underwater positioning device arrives at the target position in about 50 s from the initial position, then hovers, and finally the actual position of the underwater positioning device coincides with the target position, however, the shortcomings of sliding mode control are also exposed. It can be clearly seen that the sea cucumber fishing robot still has slight buffeting after reaching the fixed point.

Change curve of axial displacement x.

Change curve of longitudinal displacement y.

Change curve of vertical displacement z.
Stability analysis of direction control based on sliding mode control positioning device
By Figures 15 to 17, you can see that when positioning device fixed point run around the x-, y-, z-axis has certain angular velocity, affected by the environment or the amount of internal control, the sea cucumber harvesting robot underwater positioning device around the x-, y-, z-axis deflection of angular velocity is near 0 rad/s of a relatively small fluctuations, can be relatively steady underwater grab activity. Combined with Figures 12 to 14, the angular velocity in the three directions shown in Figures 15 to 17 was analyzed. It was obvious that although the sliding mode control algorithm could meet the basic positioning and hovering function of the sea cucumber fishing robot, it had strong imprecision to the position. Its vibration effect obviously affects the angular velocity in the three directions, and the slight change of angular velocity can play a crucial role in the size of the angle. In a word, the sliding mode control algorithm can realize the basic function, but the accuracy of the positioning function is affected by the vibration problem.

Variation of angular velocity ωx around the x-axis.

Variation of angular velocity ωy about the y-axis.

Variation of angular velocity ωz about the z-axis.
Simulation experiment of fixed point control of adaptive sliding mode controller
The default initial position is x = 0 m, y = 0 m, and z = 0 m; set the target position x = 5 m, y = 5 m, and z = 10 m; control the underwater positioning device from the initial position to the target position and hover after reaching the target position.
It can be seen from Figures 18 to 20 that the underwater positioning device reaches the target position in about 6 s from the initial position, hovering, and finally the actual position of the underwater positioning device coincides with the target position. The final error of the adaptive sliding mode controller is bounded. Since the verification of the adaptive control algorithm is based on a more ideal mathematical model of the sea cucumber fishing robot, the effects presented are extremely ideal, and the control effect of the algorithm can be better observed.

Change curve of axial displacement x.

Change curve of axial displacement y.

Change curve of axial displacement z.
Stability analysis of directional control of adaptive sliding mode controller
It can be seen from Figures 21 to 23 that when the underwater robot body is running, the underwater positioning device of the sea cucumber fishing robot can be deflected around the x-, y-, and z-axes due to the influence of the environment and internal control. Ignoring slight changes, the slope of the image represents the angular velocity. It can be seen from the figure that the angular velocity of deflection around the x-, y-, and z-axes is almost 0 rad/s. This algorithm better solves the chattering problem of sliding mode control and can realize underwater grasping activities more stably.

Variation of angular roll around the x-axis.
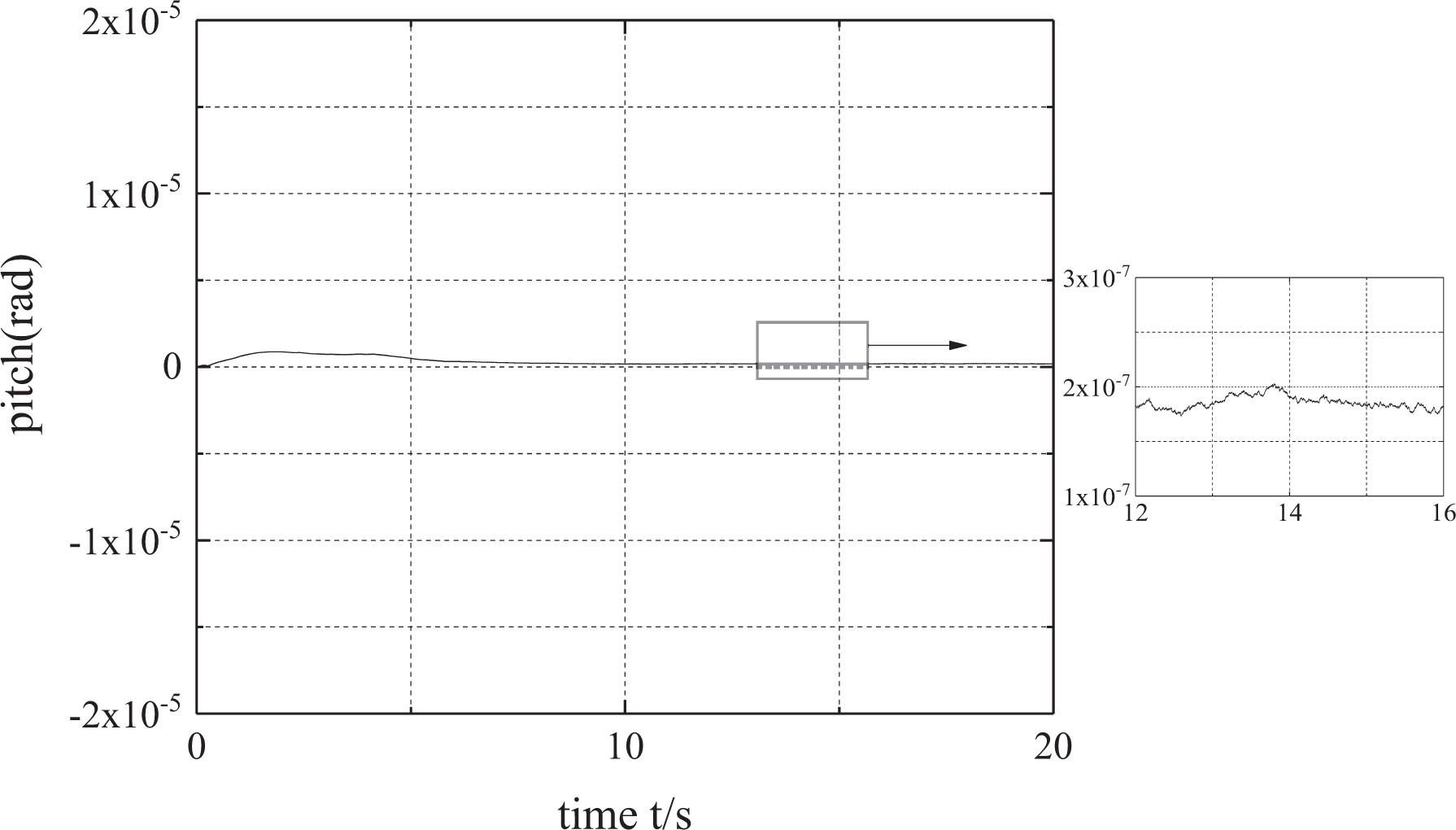
Variation of angular pitch around the y-axis.

Variation of angular yaw around the z-axis.
Underwater robot system is a complex system, which is characterized by high coupling, poor timeliness, and easy to be affected by the forces of multiple directions underwater. Fuzzy control and sliding mode control do not need the system model, fuzzy control according to the actual reflection of the system membership function. There is no need to establish mathematical model for fuzzy control, and the control mechanism is in line with people’s intuitive description and logical thinking of process control. Its disadvantage is that the design lacks systematicness and the selection of control rules adopts trial and error method. Sliding mode control is achieved by changing the structure of the system so that it is often ideal and is adaptive to the general idea of comparing model output with the actual output of the system. It can solve optimization problems with minimal deviation. This model can reflect the actual situation of the system, and then the corresponding control law u can be calculated according to the model. By modifying its parameters in time, the dynamic characteristics of the control system object and disturbance can be adaptive. The sliding mode variable structure has fast response, especially its simple algorithm and easy engineering implementation. The advantage of adaptive sliding mode control is that it combines the advantages of sliding mode control and adaptive control. Compared with fuzzy control, the adaptive slide mode control method is more systematic and timeliness. It can adjust the strategy according to the changes of the system, so as to ensure strong realizability and intelligent effect.
By comparing Figures 18 to 20 with Figures 12 to 14, it is obviously observed that after reaching the specified position and stabilizing, the control effect of adaptive sliding mode control is better. Unlike the sliding mode control algorithm, it does not show repeated back and forth movement near the target value, which effectively alleviates the tremor problem. It can also be seen from Figures 21 to 23 that the angles of the three directions are maintained well, with only minimal fluctuations and little influence on positioning. Therefore, the adaptive sliding mode control method effectively makes up for the defects of sliding mode control, and achieves the effect of vibration reduction, with strong control accuracy.
This experiment verifies that the underwater positioning device based on the adaptive sliding mode control algorithm can realize the positioning function more stably.
Conclusion
The main work completed in this article is to design and control an underwater robot suitable for sea cucumber fishing. Underwater robot technology is mature, but the use of underwater robots for sea cucumber fishing is an emerging idea, and there are relatively few related papers. Therefore, the article mainly uses other underwater robot technologies and discusses the feasibility of applying these technologies to sea cucumber fishing, and improves these technologies according to the special requirements of sea cucumber fishing. The innovation of this article is to use the existing underwater robot technology to build a sea cucumber fishing robot that can be invested in research, focusing on the application in the field of aquatic products. In this article, the shape of the robot is modular design, in the combination of the process of full consideration of the practical application of various problems, such as assembly problems, follow-up maintenance problems, robot resistance in the water, and strive to achieve the design can be used in practice. In other areas, such as conveyor belt systems, voids are also used to reduce weight.
After decades of development, the technology of underwater robots has become more and more mature, and the scope of application has changed from simple underwater navigation to complex underwater operations. However, the commercialization degree of underwater robots is still not enough at present, so the development of specialized functional robots like sea cucumber fishing robot is slow. And it is also a business opportunity, if you can with the economic and reliable underwater sea cucumber harvesting robot quickly occupy the market and form the industrial chain, later in order to design the thinking of sea cucumber harvesting robot assembly system to design other specialized type of underwater robot, can form effective and cheap underwater robot industry chain to fill the blank in this field.
Footnotes
Appendix 1
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Scientific Research Foundation of Nanjing Institute of Technology under grant number CKJA201903; the National Natural Science Foundation of China under grant number 51505213; and the QingLan Project of Jiangsu Province.