
Abstract
To improve the ride comfort of electric vehicle, the vertical dynamic model of electric vehicle is established under the excitation of road surface and wheel hub motor. The road excitation is divided into random continuous road and convex road, and the influence of motor electromagnetic excitation on vibration is analyzed. To avoid the empirical value influence of each index weight coefficient on the main vibration control, the weight coefficient is determined by analytic hierarchy process (AHP), the LQG controller of vehicle active suspension is designed by using optimal control theory, and the comprehensive optimization of performance index is realized. The effectiveness of control effect is verified by comparing active and passive control based on single and double excitation.
Introduction
Electric vehicles (EVs), which are receiving considerable attention, are effective solutions for energy and environmental problems.1,2 Wheel hub motors (WHM) are currently being considered as an opportunity to propel electric vehicles (EVs).3,4 The wheel hub motor-driven electric vehicle has larger utilization space, more reasonable equipment distribution, omitting part of the transmission device, higher efficiency, and full energy utilization after simplification. 5 It can realize multiple braking modes, and the lost energy is easy to be recycled, thus improving the economic type, good acceleration performance, and more flexible steering.6,7 However, the new driving form and special structure layout aggravate vehicle vertical vibration, which makes ride comfort and handling stability worse. 8 There are various studies in the literature on wheel hub motor control robustness enhancement. An improved deadbeat predictive stator flux control (DPSFC) based on disturbance observer is proposed to address the problems of the steady state tracking error and robustness decrease due to the detrimental parameter mismatch and disturbance. 9 The other MPCC cancels the cost function, it selects the optimal voltage vector based on a current track circle instead of a cost function. 10 Sun et al. 11 combined composite sliding mode observer with deadbeat predictive controller for delay compensation and robustness enhancement for PMSMs. Li et al. 12 proposed a multi-objective optimization control method for active suspension system, and established a comprehensive model considering the electromechanical coupling of motor electromagnetic excitation and vehicle transient dynamics. As for the influence of wheel motor excitation on the ride comfort of electric vehicles, the elimination and influence degree have been studied.13–15 In this paper, vertical vibration is comprehensively analyzed under random and convex road and electromagnetic force of motor is included as excitation source.
There are two methods to suppress and control vibration: passive control and active control.16,17 Traditional passive suspension can not give consideration to ride comfort and handling stability. If the suspension stiffness is lowered, the acceleration of vehicle body will be reduced, and the comfort of vehicle can be changed, but the displacement of vehicle body will increase, which will easily lead to lateral sliding, jumping, and poor grip ability, which will affect the driving safety.18,19 Passive suspension has not reached the required performance requirements, so active suspension with stronger control ability is used to alleviate the contradiction between ride comfort and handling stability to adjust the vertical vibration of vehicle, which brings an opportunity to solve this problem.20–22 The active control method introduces the active force element to control the vibration of the target structure. 23 In this paper, the active control force is exerted by shock absorber, which is installed between the body and the suspension, so as to establish the active suspension system.
The essence of active control method is to apply external excitation to reduce vibration displacement, which can make up for the inherent lack of robustness of passive control technology and achieve better vibration control effect. 24 The research of active control technology is mainly based on control algorithm. If there are defects in the design of control system and control loop, the vibration control device may turn into a vibration generator and become an unstable factor.25,26 Active suspension control includes modern, intelligent, and compound control.27–29 Considering the nonlinear characteristics of continuous variable semi-active shock absorber, Chen et al. 30 obtains the damping force by subtracting the air spring force from the optimal comprehensive suspension force calculated by LQG control. Yoshiki et al. 31 proposed a method to control the primary suspension vibration to reduce vehicle body vibration, numerical simulation, and excitation test were carried out based on LQG control theory. The active suspension with LQG control strategy can control many indexes, and the control effect is obvious and stable.32–34 This paper adopts a more perfect quadratic linear optimal control. The objective function of traditional LQG control method usually adopts random empirical value. In order to avoid the influence of uncertain empirical value on control effect, AHP is adopted to calculate the uncertain random weight value.
In this paper, to solve the vibration problem caused by wheel motor driving in the vertical direction, the model is established and studied, and the generation and transmission mechanism of the force are studied. The active suspension is used to improve the transmission path and improve the vehicle ride comfort. The model of electric vehicle is established for vibration analysis, and the optimal control strategy is proposed, which analyzes by comparing the passive suspension and provides a theoretical basis for improving the vertical vibration of vehicle.
Quarter vehicle dynamic model under double excitation
Road excitation model
The time domain expression of road input is shown as follow. 35

where is road roughness displacement, is Gaussian white noise.
In addition to the above-mentioned continuous random road surface, the car will pass through the deceleration strip, concave, and convex road surface. W

Pulse bump road excitation.
Motor excitation model
The torque ripple of wheel drive motor directly affects vertical force between wheel and road surface, which aggravates the vibration of vehicle body and worsens ride comfort. A disk type permanent magnet brushless iron core DC motor is selected as research object, and the excitation of wheel motor to vehicle vibration system is analyzed and determined. Because the vehicle vertical vibration is the main content of this paper, and the human body is the most sensitive to the vertical vibration, it is necessary to determine the variation law of the motor excitation force in the vertical direction. When establishing the vibration model of permanent magnet synchronous motor (PMSM), motor vibration is caused by torque fluctuation. The vertical component of tangential force and radial force between rotor and stator is taken as excitation source.
Compared with the radial field motor, the structure of the disk permanent magnet brushless motor is only changed, and the basic electromagnetic relationship is not changed. Therefore, the electromagnetic torque formula can be deduced as follows.

where
The relationship between tangential force and time is shown in equation (3).

where
The components of tangential force in the vertical direction are as follows.

where
According to equations (1) and (2), the excitation force is as follows.

For the wheel hub disk permanent magnet DC motor, its main parameters are shown in Table 1.
Parameters of permanent magnet DC motor.

According to electromagnetic torque and the excitation force of motor in the vertical direction, the curve of vertical exciting force versus time is calculated and drawn, as shown in Figure 2.
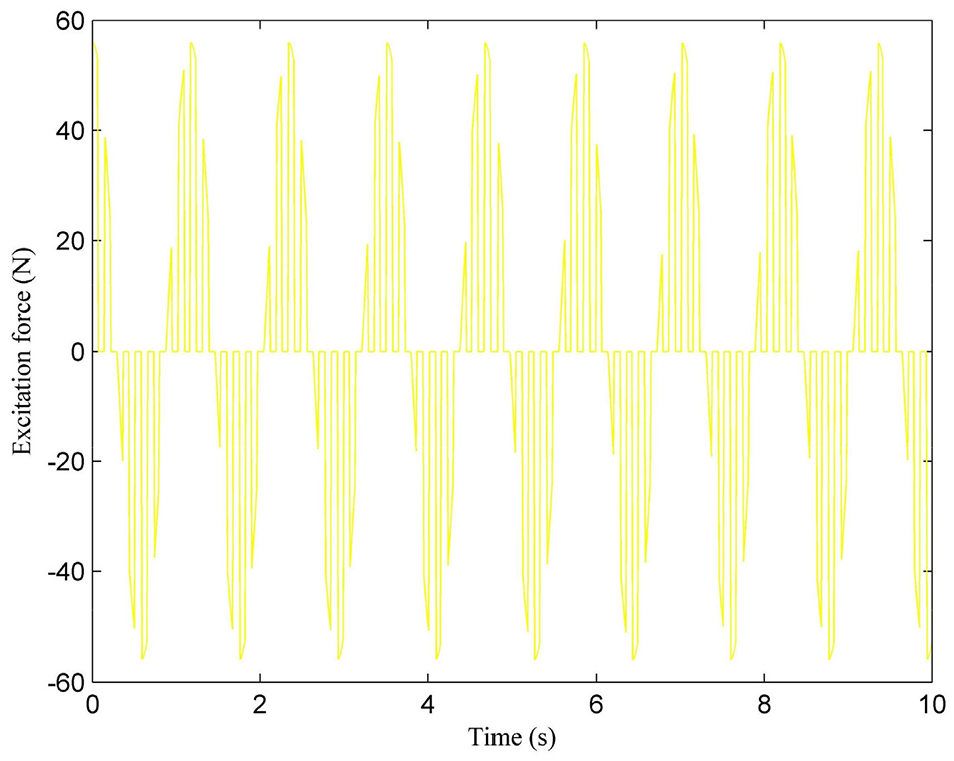
Vertical excitation force of motor.
As shown in Figure 2, the vertical excitation force of motor changes periodically, excitation force amplitude varies greatly, and the variation frequency is very large. Therefore, the electromagnetic force has a great impact on ride comfort. When electric vehicle is parking and the motor is still working, road excitation can be ignored, and only the motor excitation force is input source.
When only motor excitation is used as input source, the results obtained are shown in Figure 3. It can be seen that the influence of motor excitation on vehicle ride comfort cannot be ignored.

Effect of motor excitation on vibration.
Quarter vehicle dynamics model
The electric vehicle driven by wheel hub motor concentrates the motor in each driving wheel, which makes chassis structure change obviously. The electromagnetic vibration will directly act on suspension, and then transfer to the body. And road excitation acts on the wheels, which aggravates body vibration and has adverse effects on vehicle ride comfort and safety. When the road roughness and electromagnetic excitation of motor are considered, the model is shown in Figure 4. And the 1/4 vehicle model parameters are shown in Table 2.

Dynamic model under double excitation.
Parameters of 1/4 hub drive electric vehicle.

The mathematical model is as follows.

where
Passive control of wheel drive quarter vehicle model
To optimize vehicle body acceleration, tire dynamic displacement, and suspension dynamic deflection, passive control is used to alleviate the vibration generated by road excitation and motor excitation. And the three evaluation indexes are compared and analyzed under road excitation and double excitation.
Passive control under road excitation
When only the road excitation is considered as the input source of vibration, the passive control model of 1/4 vehicle are shown as follows.


The state vector of vibration system is as follows:

Input vector is as follows:

Then system output vector is as follows.

The state and output equations of system are as follows:


where



According to state space equation and the calculation results of various parameters, the simulation module of passive control is established and the simulation results are shown in Figure 5.

Passive vibration control under road excitation: (a) vertical vibration acceleration, (b) wheel dynamic displacement, and (c) suspension dynamic deflection.
When the road surface is convex road with deceleration belt, the control effect can be obtained by using passive control, as shown in Figure 6.

Passive control under convex road surface: (a) vertical vibration acceleration, (b) wheel dynamic displacement, and (c) suspension dynamic deflection.
When passive control is adopted under road excitation, the control effect of wheel dynamic displacement and suspension dynamic deflection is ideal, the RMS value of wheel dynamic displacement is 0.0093 m, the RMS value of suspension dynamic deflection is 0.0048 m, and the minimum value of body vertical acceleration is large, which affects the improvement of vehicle ride comfort and vibration control effect is not ideal. When vehicle passes through convex road, evaluation index value increases significantly compared random road excitation.
Passive control under double excitation
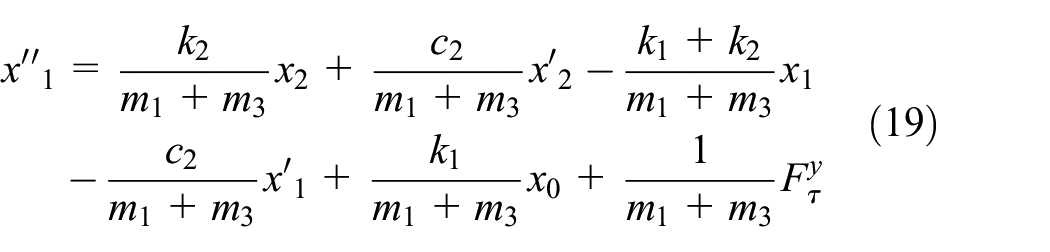
When considering road excitation and motor electromagnetic excitation as vibration input sources, the 1/4 vehicle vibration passive control model is given, and equation (10) can be transformed into equations (18) and (19).

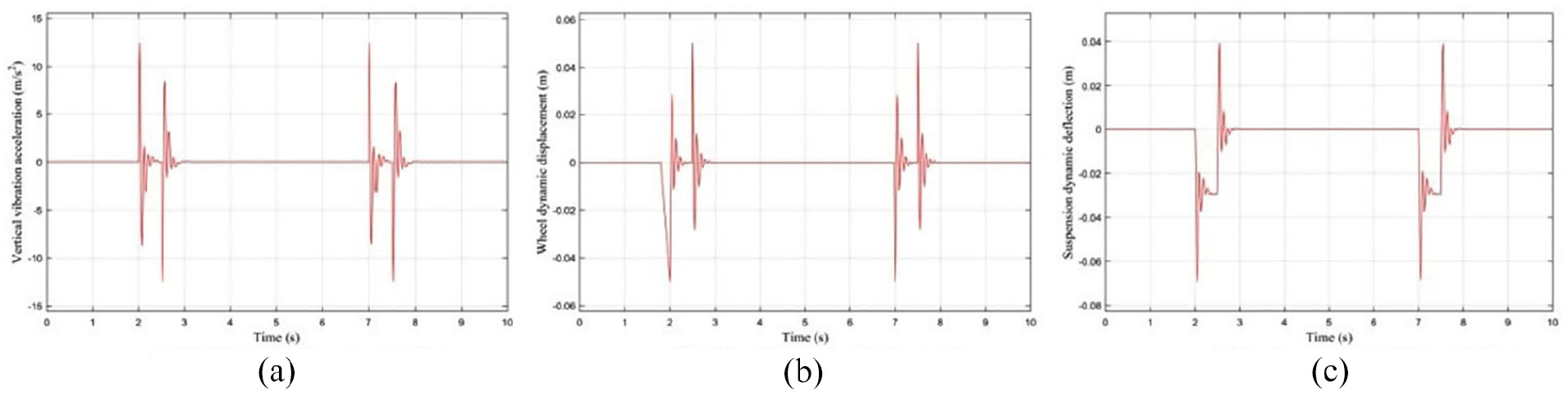
The state and output equations are analyzed. According to the state space equation and the calculation results of various parameters, the passive control simulation module of double excitation is shown as follows in Figure 7.

Passive control under random road and motor excitation: (a) vertical vibration acceleration, (b) wheel dynamic displacement, and (c) suspension dynamic deflection.
The results are as follows under the double excitation of raised road surface and motor.
The simulation results show in Figure 8 that the RMS values of wheel dynamic displacement and suspension dynamic deflection are 0.0096 and 0.0149 m, respectively. However, the vertical vibration acceleration is larger under passive control. When the vehicle passes through convex road, the index value increases and decreases sharply, and the effect of passive control is not ideal, which is not conducive to the improvement of vehicle ride comfort.

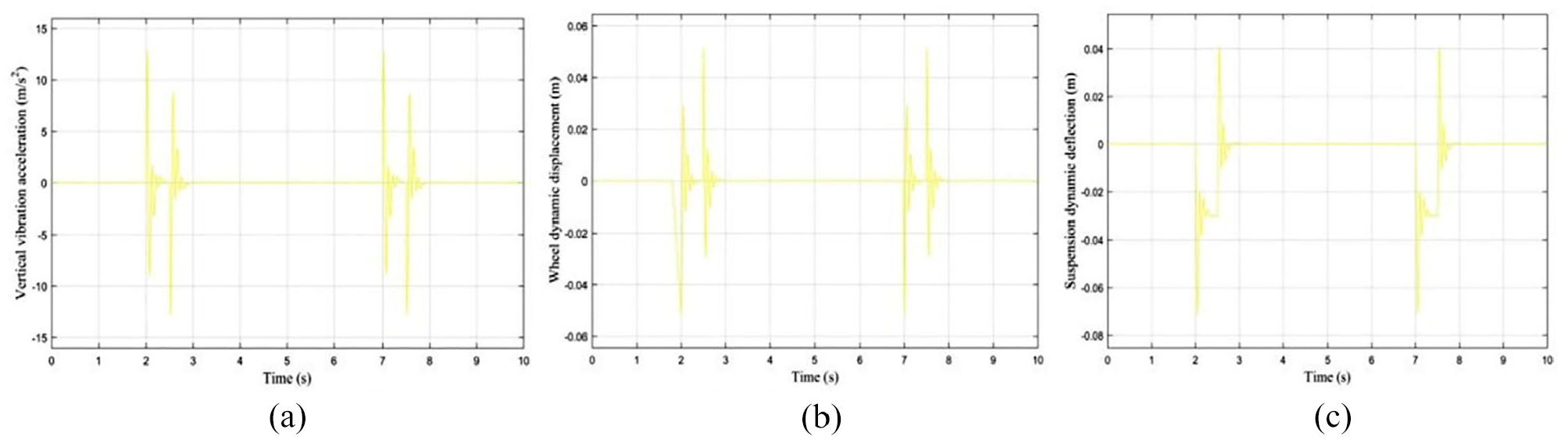
Passive control under convex road and motor excitation: (a) vertical vibration acceleration, (b) wheel dynamic displacement, and (c) suspension dynamic deflection.
Active control of wheel drive quarter vehicle model
Active control can carry out optimal control and the actual state of vehicle operation, so that overall driving performance can reach the best. The main characteristic of active control is that it can provide energy actively. Compared with traditional passive control, its biggest advantage is that it has a high degree of adaptability. According to different control strategies, active control can be divided into canopy damping control, adaptive, and optimal control. However, skyhook damping control cannot make overall performance reach the optimal, and the accuracy of adaptive control is not high. Therefore, this paper adopts a more perfect quadratic linear optimal control. But the random empirical value is usually adopted for the objective function in LQG. To avoid the influence of uncertain empirical value on control effect, the analytic hierarchy process (AHP) is used to determine the weighting coefficient. The vertical vibration acceleration, wheel dynamic displacement, and suspension dynamic deflection are analyzed by building active control model and simulation calculation.
The performance objective evaluation function J of LQG controller design is as follows:

The weighting coefficients of each performance evaluation index of LQG controller are as shown in Table 3. 35
Index weighting coefficient.

Active control under road excitation
To obtain active suspension system, a controller is installed between vehicle body and the suspension to exert active control force. The dynamic model of 1/4 vehicle active control is established in equation (21).

where
The results of vertical acceleration, wheel dynamic displacement, and suspension dynamic deflection are shown in Figure 9.

Active vibration control under random road excitation: (a) vertical vibration acceleration, (b) wheel dynamic displacement, and (c) suspension dynamic deflection.
The results of active control under convex road are shown in Figure 10.
Active vibration control under convex road excitation: (a) vertical vibration acceleration, (b) wheel dynamic displacement, and (c) suspension dynamic deflection.
Active control under double excitation
When road excitation and electromagnetic force of motor are considered, the dynamic model of active suspension system is shown in equation (22). And the results are shown in Figure 11.


Active control under random road and motor excitation: (a) vertical vibration acceleration, (b) wheel dynamic displacement, and (c) suspension dynamic deflection.
The results of active control under convex road and motor excitation are shown in Figure 12.
Active control under convex road and motor excitation: (a) vertical vibration acceleration, (b) wheel dynamic displacement, and (c) suspension dynamic deflection.
According to the established active control model, the control effects under single excitation and double excitation are analyzed respectively, and the root mean square values are shown in Table 4.
Comparison between active and passive control.
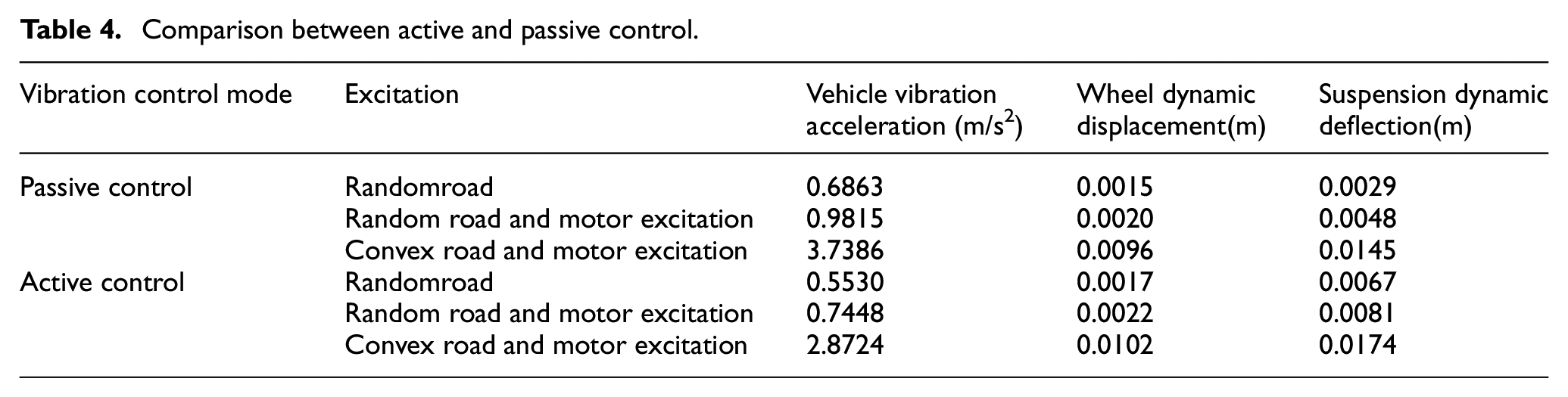
It can be seen from Table 4 that when passive control strategy is adopted, the amplitude of each index fluctuates greatly under single excitation and double excitation, especially when vehicle passes through the convex road. When the motor vibration excitation is introduced, the vertical vibration acceleration of vehicle body increases greatly. Therefore, the motor excitation cannot be ignored when analyzing vehicle ride comfort. Compared with the passive control, the designed control strategy can significantly reduce vertical vibration acceleration, while suspension dynamic deflection and wheel dynamic displacement are not well controlled. The reason for this phenomenon lies in the contradiction between the evaluation indexes. In order to improve the vertical vibration acceleration of vehicle body, the performance of other indexes is sacrificed to a certain extent.
Conclusions
To improve the ride comfort of wheel drive electric vehicle, the vertical dynamics models of wheel drive electric vehicle are established under road and motor excitation, and the evaluation index of vehicle vibration is analyzed by using passive and active control, respectively.
Road roughness is the main excitation input source which leads to vehicle vibration. The electromagnetic field of hub motor can also make electric vehicle produce periodic excitation force in vertical direction, which cannot be ignored. When passive control is adopted, the control effect of vertical vibration acceleration, wheel dynamic displacement, and suspension dynamic deflection are very poor under the excitation of convex road and motor, and the convex road seriously affects vehicle ride comfort. When the active control is adopted under the excitation of random road and motor, the three indexes can get better control, but the amplitude changes greatly.
AHP is used to determine the random weight of LQG control, which can effectively avoid the influence of uncertain empirical value on the effect of three vibration control indexes. The body acceleration control effect under the proposed active control method is significantly improved. The influence of motor electromagnetic force on body acceleration can not be ignored. The motor excitation needs to be input as the excitation source to establish the active vibration control of electric vehicle.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.