
Abstract
Structures dynamic characteristics and their responses can change due to variations in system parameters. With modal characteristics of the structures, their dynamic responses can be identified. Mode shape remains vital in dynamic analysis of the structures. It can be utilized in failure analysis, and the dynamic interaction between structures and their supports to circumvent abrupt failure. Conversely, unlike empty pipes, the mode shapes for pipes conveying fluid are tough to obtain due to the intricacy of the eigenvectors. Unfortunately, fluid pipes can be found in practice in various engineering applications. Thus, due to their global functions, their dynamic and failure analyses are necessary for monitoring their reliability to avert catastrophic failures. In this work, three techniques for obtaining approximate mode shapes (AMSs) of composite pipes conveying fluid, their transition velocity and relevance in failure analysis were investigated. Hamilton’s principle was employed to model the pipe and discretized using the wavelet-based finite element method. The complex modal characteristics of the composite pipe conveying fluid were obtained by solving the generalized eigenvalue problem and the mode shapes needed for failure analysis were computed. The proposed methods were validated, applied to failure analysis, and some vital results were presented to highlight their effectiveness.
Introduction
Indeed, the involvement of pipes for conveying fluid is increasing on a daily basis and there is no sign that the trend will cease or decline in the nearest future. This is due to the frequent use of pipes for conveying fluid in oil and water pipelines, marine risers, chemical plants, nuclear industry, aerospace, irrigation, and municipality just to mention a few. These pipes are subjected to flow-induced vibration during the operation as a result of turbulence in the flow and this may easily cause pipe failures. Thus, dynamic analysis of the pipes conveying fluid is necessary for monitoring the pipes integrity to avoid failure. Many investigators have worked on pipe failure analysis using different techniques. Bhardwaj et al. 1 examined the reliability of the structure of a pipe-in-pipe in deep-waters under critical operating conditions. In their study, the First-Order and Second-Order, reliability techniques, and Monte Carlo Simulation methods were employed. Chu et al. 2 analyzed the failure of a steam pipe that has been in service for more than one decade. Finite element analysis and experimental methods were considered during the analysis. Majid et al. 3 carried out the failure analysis of eroded pipe using the computational fluid dynamics and experimental methods. Some researchers have also made use of machine learning and dynamic analysis in the pipe failures analysis. For instance, Tang et al. 4 investigated the plastic water pipe failure using Bayesian network models in which a guided method and automated learning algorithms were employed. Also, Robles-Velasco et al. 5 employed support vector classification and logistic regression as predictive systems to predict water pipe failures. Ashrafizadeh et al. 6 studied the crack failure of a gas pipe that has been in service for roughly three decades. In their investigation, dynamic analysis, first mode shape, and others were considered. El-Gebeily et al. 7 developed a method for detecting pipe internal damage in which vibration modal characteristics were employed and B-spline scaling function was used to formulate the model. Other investigations that have been carried out on pipes failure analysis can be found in Ying et al., 8 Rezaei et al. 9
It can be observed in the above review that pipe mode shapes have not been given much attention in the failure analysis. However, with proper monitoring of the pipe system, any pipe that has been compromised due to internal damage, erosion or chemical attack, and other factors can be detected through the mode shapes. Since geometry can affect mode shapes, monitoring mode shapes can be employed to avoid failure due to the fact that a compromised pipe will display abnormal mode shapes. As a result the majority if not all the failure types or modes observed or mentioned in the review may be avoided. Nevertheless, unlike empty pipes, dynamic analysis of the fluid pipes is difficult because the undamped pipe will become damped as fluid starts flowing through it. Consequently, complex eigenvalues and eigenvectors will emerge and mode shapes constructions become complicated. A suitable technique needs to be employed to be able to obtain mode shapes that can be used in failure analysis, damage assessment, shape estimation, and in order to avoid pessimistic effects of vibration. While significant attentions have been given to the techniques that can be employed to obtain mode shapes of other structures,10–16 few researchers have paid attentions to the methods for obtaining the mode shapes of pipes conveying fluid. Liu et al. 17 utilized frequency response function based technique to compute mode shapes of fluid pipe while natural frequencies were obtained using a hybrid analytical numerical technique based on the Transfer Matrix Method. Yun-dong and Yi-ren 18 investigated the free vibration analysis of a pipe conveying fluid with different boundary conditions using He’s variational iteration technique and the real part of complex modes was employed to obtain mode shapes. Mediano-Valiente and Garcia Planas 19 studied the dynamics and stability of clamped-pinned pipes conveying fluid using eigenvalues of a Hamiltonian linear system and the natural frequencies and mode shapes employed in their study were also obtained using ANSYS. Arjmandi and Lotfi 20 obtained the mode shapes of fluid-structure systems using an accelerated pseudo symmetric subspace iteration method in conjunction with finite element program developed for dynamic analysis of systems. Ryu et al. 21 employed the concept of quasi-mode shape to examine unstable modal shapes associated with flutter of viscoelastic cantilevered pipes conveying fluid wherein extended Hamilton’s principle was used to obtain equation of motion. Wang et al. 22 investigated the mode shapes of cantilevered pipes conveying fluid at different flow velocity in which equation of motion was solved using Differential Quadrature Method. Zhou et al. 23 studied the mode shapes of axially functionally graded cantilevered pipes conveying fluid. Their governing equations and the equations for boundary conditions were also discretized using Differential Quadrature Method. Sarkar and Paidoussis 24 utilized semi-analytical approach to obtain the proper orthogonal modes of non-linear oscillation of a cantilevered pipe with end-mass conveying fluid.
Regarding marine risers used widely for conveying fluid, Alfosail et al. 25 have obtained the natural frequencies and mode shapes of a marine riser using Galerkin approach in which Euler-Bernoulli beam theory was employed to model the riser. Chen et al. 26 utilized differential transformation method to study natural frequencies and mode shapes of marine risers with different boundary conditions.
From the review, one can infer that more needs to be done on the construction of mode shapes of structures or pipes conveying fluid in order to be able to use them to examine the integrity of the pipes regularly to avoid plant down time, revenue loss, and catastrophic failure. The work presented in Oke et al. 27 was expanded in this study, more AMSs were presented for different pipes at different velocities, and these mode shapes were used to investigate fluid pipe failure analysis. Hamilton’s principle was utilized to obtain the equation of motion of the composite pipe conveying fluid. The equation was discretized using the wavelet-based finite element method in which Euler-Bernoulli beam theory was employed. The equation obtained was then expressed in state space to obtain the generalized eigenvalue problem. The AMSs used for failure analysis were then constructed from the complex modal characteristics obtained for composite pipe conveying fluid by solving the generalized eigenvalue problem.
Composite pipe conveying fluid system formulation
As the fluid flows through the pipe (see Figure 1) with inlet velocity


where


in which

where

Laminated composite pipe conveying fluid.
Equation of motion of composite pipe conveying fluid
The Hamilton’s principle can be defined as

By substituting equations (1) and (2) in equation (5), it gives

Then, equation of motion for the laminated composite pipe with fluid flow can be obtained through the simplification of equation (6) as

where
The finite element formulation of composite pipe conveying fluid
Using the Euler-Bernoulli pipe element, equation (7) has been discretized in order to solve it, wherein theB-spline wavelet on the interval was used as it was in Oke and Khulief. 28 As a result, equation (7) can be stated in a condensed form as

where

Besides, equation (8) can be stated in state space using the state vectors

where

These vectors can be expressed for harmonic motion as

By substituting equation (10) in equation (9), the generalized eigenvalue problem can be obtained as

where
Now, the dimension of each matrix in equation (8) is
Numerical results and discussion
Here, AMSs of six pinned-pinned pipes (four composite and two isotropic pipes) were examined and subsequent failure analysis of one of them. The results obtained are as follows:
Composite pipes
The composite pipes (
Composite pipes properties.


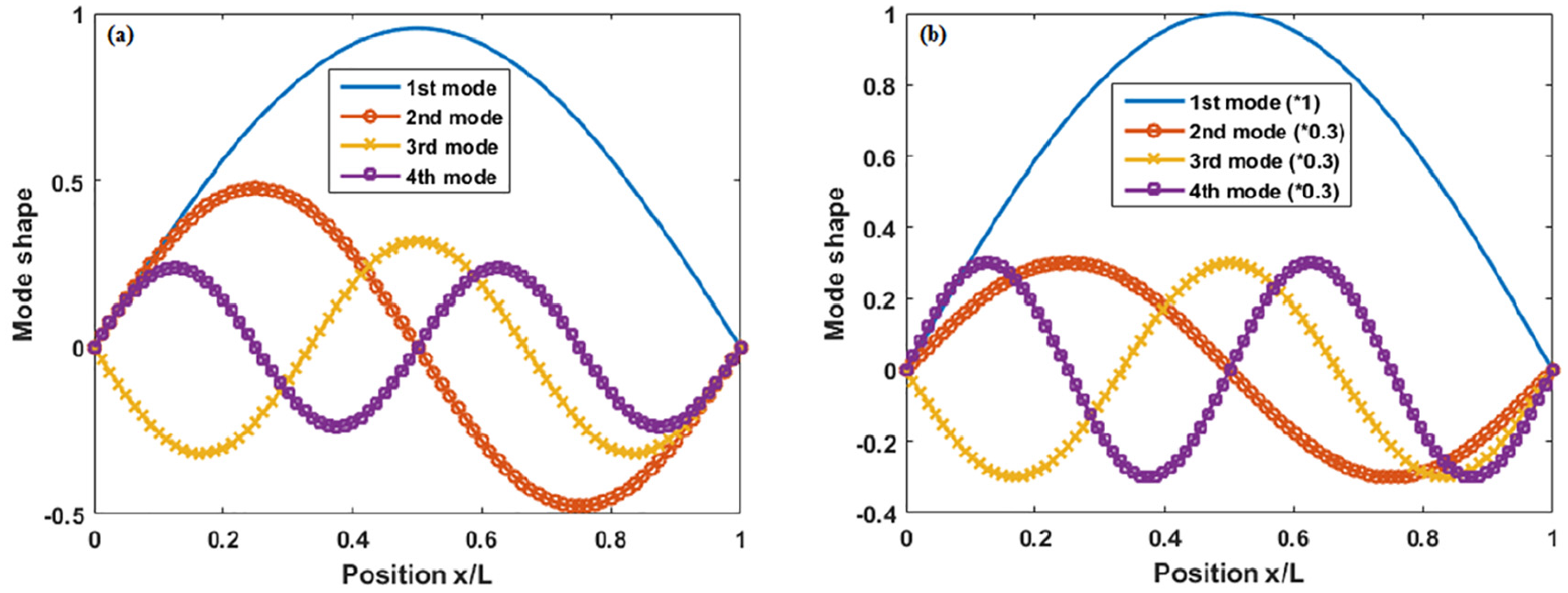
Different pipes mode shapes for the first four frequencies: (a)
Moreover, each of these pipes was then studied one after the other as the pipe conveying fluid at five different velocities that are less than each pipe critical velocity

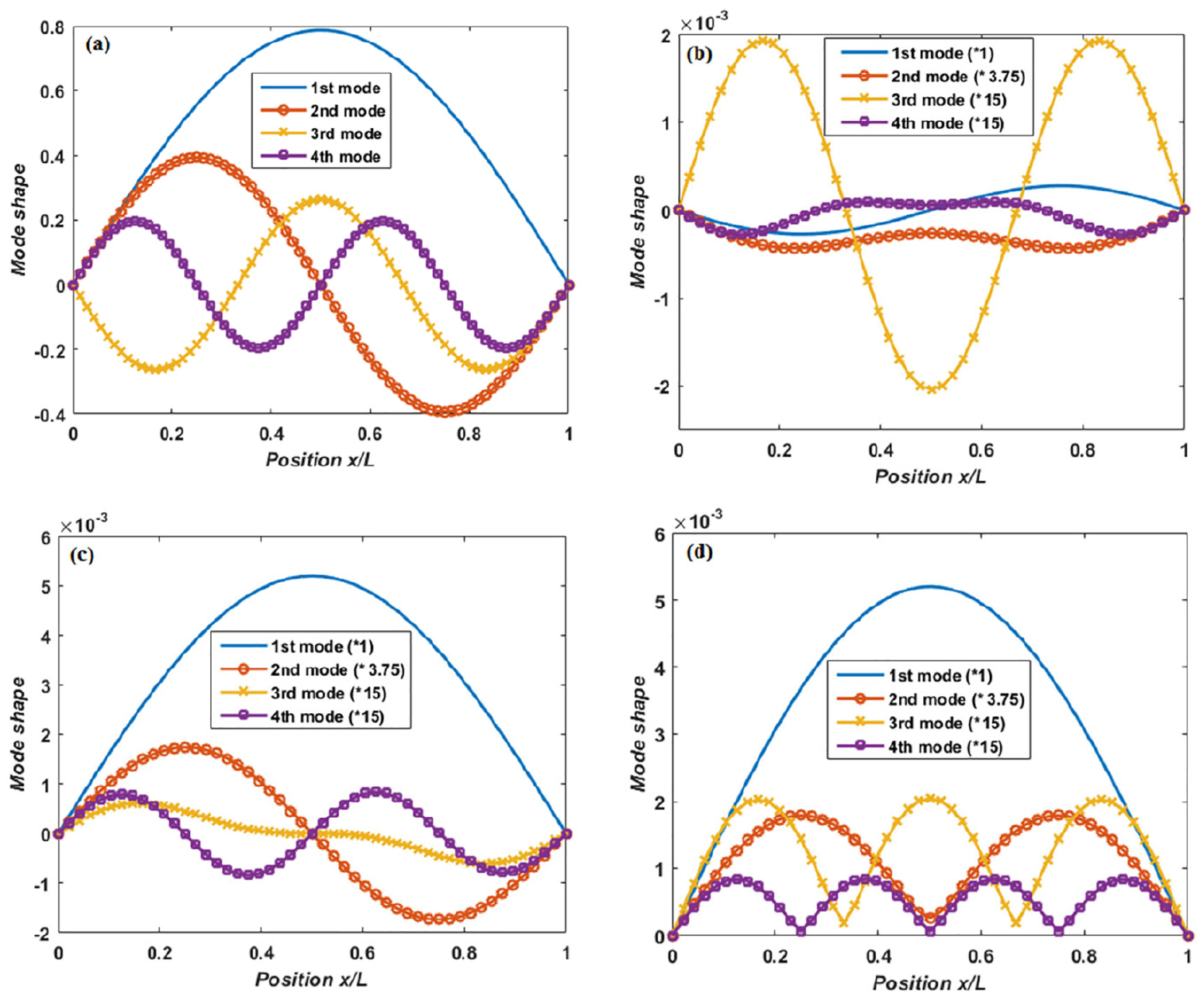
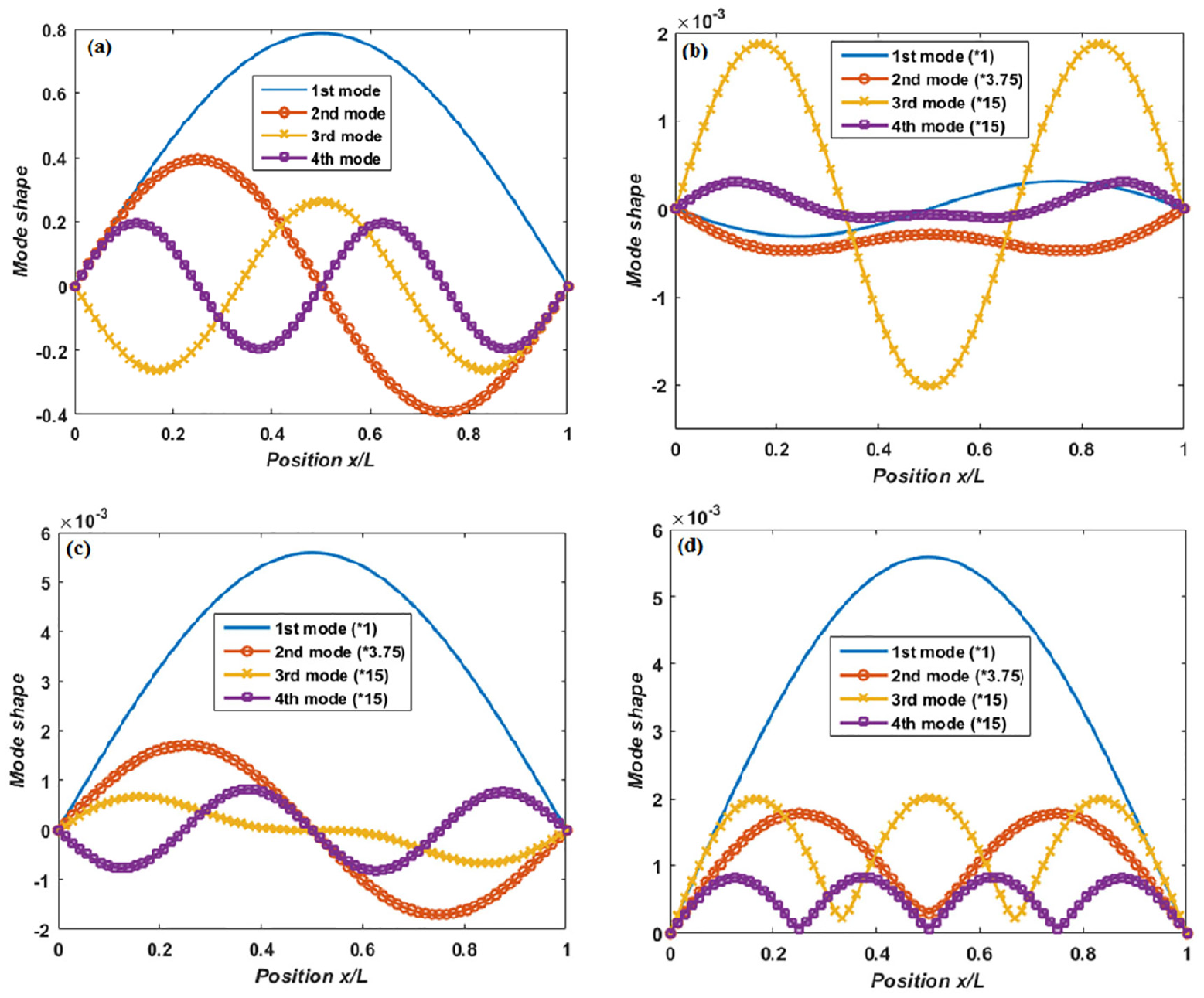
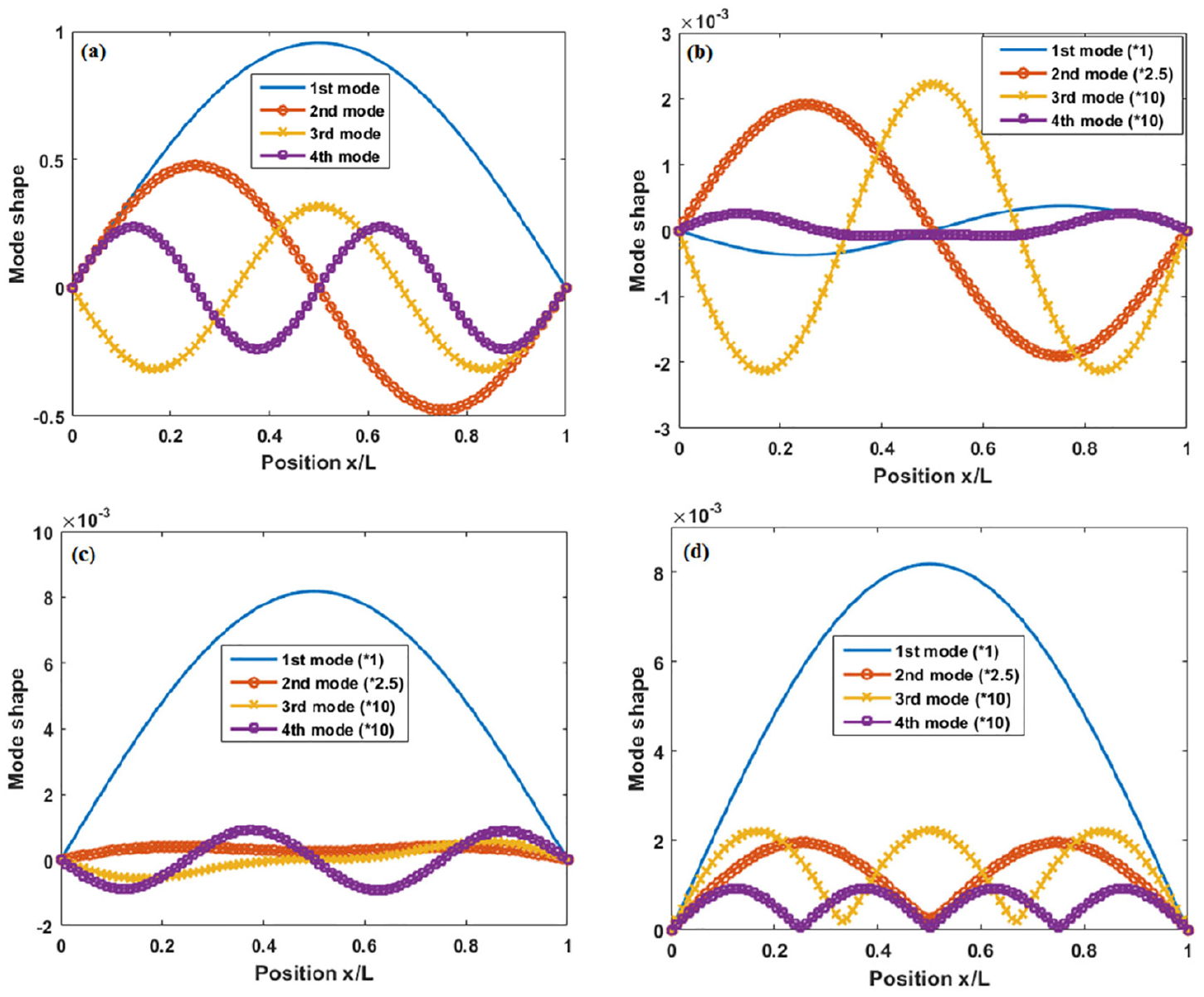
(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 10 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 60 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 70 m/s.
(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 80 m/s.
(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 90 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 10 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 40 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 50 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 60 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 70 m/s.
(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 10 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 40 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 50 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 60 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 70 m/s.
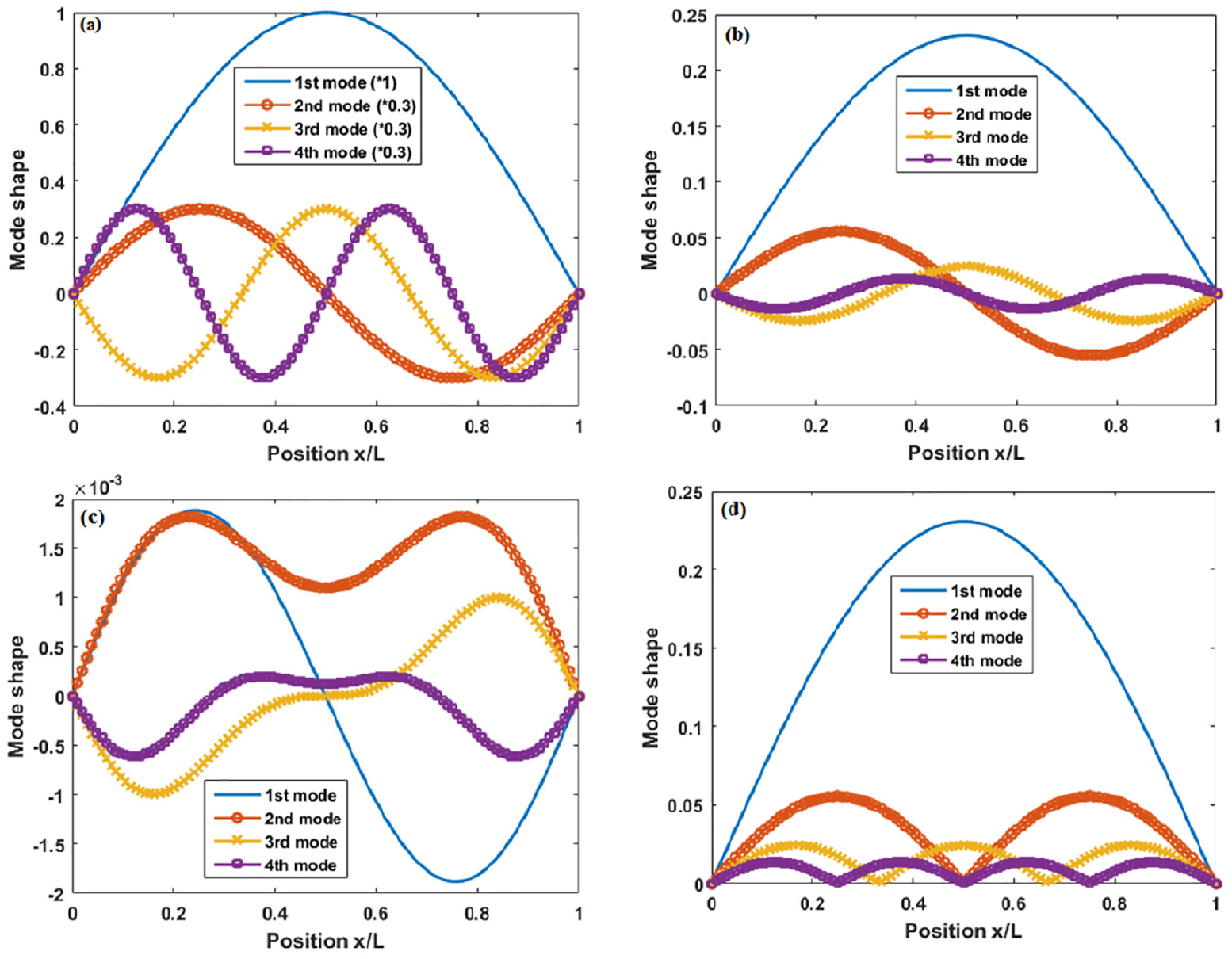
Furthermore, it can be observed from these figures that among the three methods examined for obtaining mode shapes from the complex eigenvectors, mode shapes from either absolute or imaginary part of eigenvectors can be used to study fluid pipe displacement, failure, and other analyses at lower velocities. Conversely, at higher velocities, the mode shapes from absolute or real part of eigenvectors can be employed for fluid pipe displacement, failure, and other analyses. It becomes necessary to point out that the mode shapes obtained from absolute eigenvectors that is consistent at any velocity can be modified to look like Figure 2 by changing the signs of the required areas. Thus, instead of employing the mode shapes shown in Figure 2 that are not correct mode shapes for the pipe conveying fluid for failure and further analyses, AMSs obtained from any of these methods can be utilized.
In addition, the very significant observation was observed when acceptable AMSs for
Transition and critical velocities.

Velocity with two decimal points.
Furthermore, it can also be noticed from these figures that as velocity is closer to the transition velocity, the mode shapes obtained from the imaginary part of complex eigenvectors begin to lose their forms one after the other while reverse was the case regarding the mode shapes obtained from the real part. Hence, different from what was reported in literature, it can be inferred that neither only imaginary part nor only real part of complex eigenvectors is sufficient to obtain acceptable mode shapes of pipes conveying fluid at different velocities.
Further, another pipe
Isotropic pipes
The observations under composite pipes extended this investigation to isotropic pipes and as a result, the model was modified to be able to handle isotropic pipes. The pipes
Isotropic pipes properties.

Different pipes mode shapes for the first four frequencies: (a)
Now, as it was done under composite pipes, each of these pipes was then examined one after the other as the pipe conveying fluid at five different velocities that are less than each pipe critical velocity

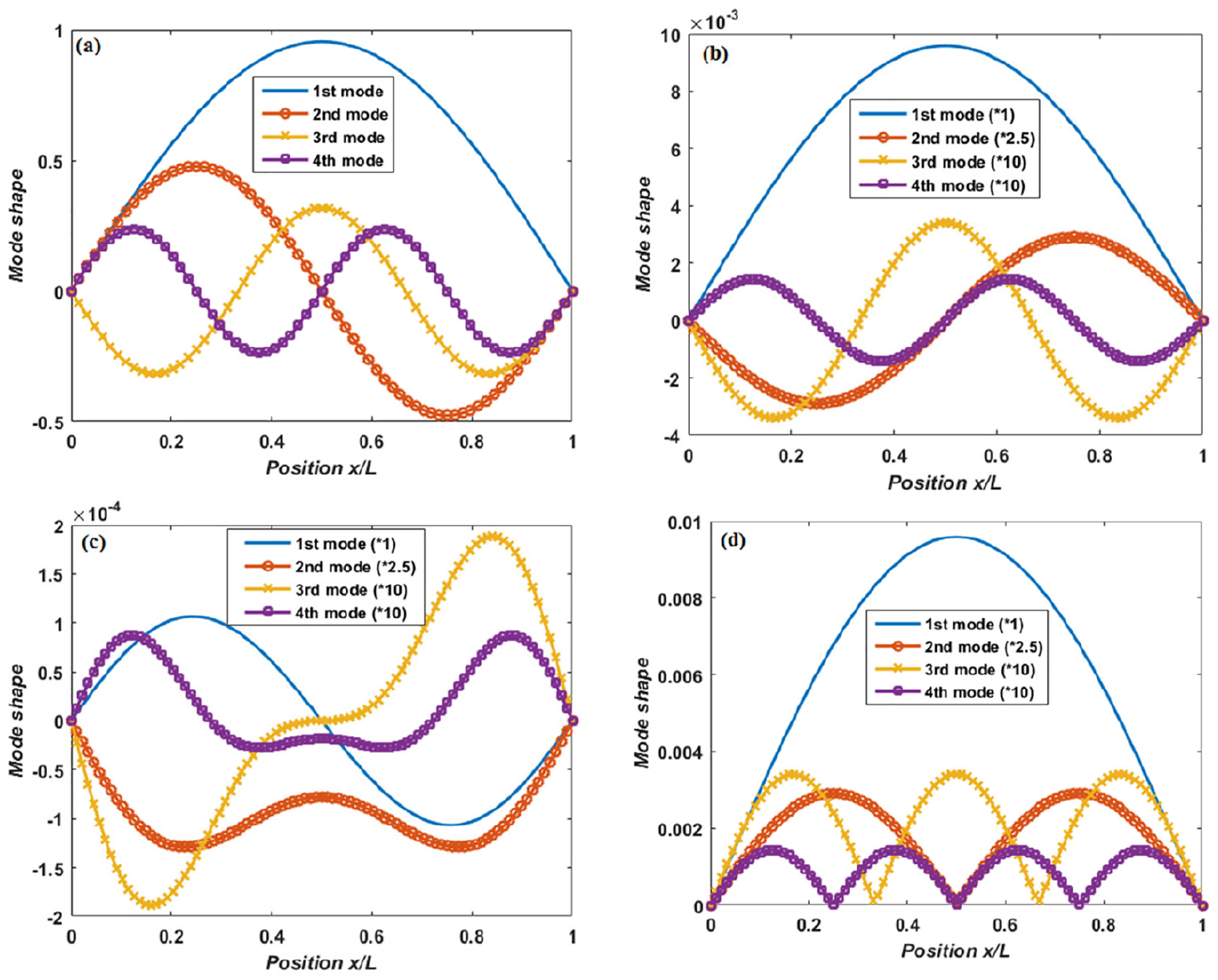
(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 10 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 70 m/s.
(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 80 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 90 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 100 m/s.
(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 10 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 50 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 60 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 70 m/s.

(a) Mode shapes for empty Pipe; (b–d) are imaginary, real, and absolute mode shapes for pipe conveying fluid at V = 78 m/s.
Isotropic pipes transition and critical velocities.

Velocity with two decimal points.
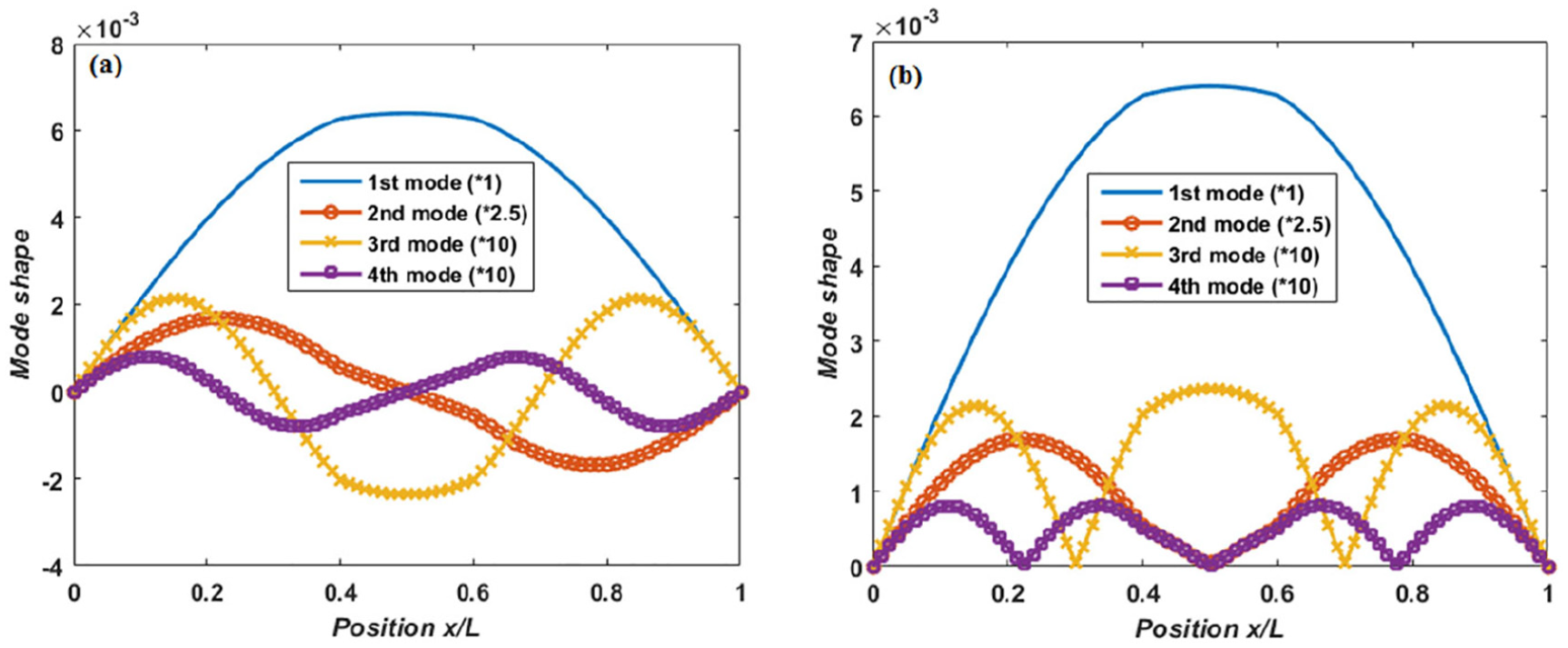
Moreover, in all the six pipes considered, it was observed that the AMSs needed for pipe failure analysis can be obtained as follows: imaginary part of complex mode shapes will give AMSs at lower fluid velocity, real part of complex mode shapes will give AMSs at higher fluid velocity while both imaginary and real parts are required to obtain AMSs around transition velocities.
Pipes failure analysis
The mode shapes obtained under different pipes are needed for successful failure analysis based on the velocity of the fluid in the pipe under consideration. It should be noted that all the pipes that have been considered above are healthy pipes and AMSs obtained at different velocities depict the actual shapes of such mode shapes. However, these mode shapes will not have the shapes of actual mode shapes once the integrity of any of these pipes (see Figure 29 ) is compromised. The pipe defect can grow in radial or longitudinal direction or both as time passes by. Thus, if the cross-sections of the region with and region without defect in Figure 29 are expanded they can be presented as shown in Figure 30. In this figure,

Pipe with internal defect.

Cross-sections of different regions of pipe with internal defect: (a) cross-section of region without defect, (b) cross-section of the region with defect, and (c) pipe defect and its width.
As a case study, pipe
Frequency of empty pipe

Frequency of pipe

Furthermore, the presence of the defect in the pipe can be noticed in the pipe mode shapes in which they will be deformed unlike when the pipe is healthy. This deformation will appear around the location where defect is present along the pipe span. Figures 31 to 33 show the new deformed mode shapes of Figure 8(b) and (d) while Figures 34 to 36 display the new deformed mode shapes of Figure 11(b) to (d) for pipe

(a, b) Imaginary and absolute mode shapes for pipe with internal defect at lc = L/4 and conveying fluid at V = 10 m/s.
(a, b) Imaginary and absolute mode shapes for pipe with internal defect at lc = L/2 and conveying fluid at V = 10 m/s.

(a, b) Imaginary and absolute mode shapes for pipe with internal defect at lc = 4L/5 and conveying fluid at V = 10 m/s.

(a–c) Imaginary, real, and absolute mode shapes for pipe with internal defect at lc=L/4 and conveying fluid at V=60 m/s.

(a–c) are imaginary, real, and absolute mode shapes for pipe with internal defect at lc = L/2 and conveying fluid at V = 60 m/s.

(a–c) Imaginary, real, and absolute mode shapes for pipe with internal defect at lc = 4L/5 and conveying fluid at V = 60 m/s.
Conclusions
Mode shapes are crucial in dynamic analysis of the structures. Three different techniques for obtaining AMSs of pipes with flowing fluid and their characteristics as the fluid velocity increases were presented, and their application in the pipe failure analysis were investigated in this work. It was observed that when there is substantial compromise in the pipe integrity due to erosion, chemicals in the fluid, corrosion, and so on; the mode shapes will be deformed. The real deformation that will indicate that the pipe has been compromised will appear in one or more of the three methods presented based on the fluid velocity. In this study, at lower velocities this actual deformation was noticed in the mode shapes from imaginary part or absolute of complex eigenvectors while it appeared in the mode shapes from the real part or absolute of complex eigenvectors at higher velocities. On the contrary, the deformation emerged in the mode shapes from all techniques around transition velocities. Once the actual deformation is noticed, the pipe under consideration can be marked as the pipe that will fail sooner or later if necessary maintenance is not done.
Hence, the findings in this study support the initiative that AMSs can be employed to assess or monitor fluid pipe integrity in order to reduce revenue loss, leakage, plant shutdown time, and prevent catastrophic failures.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.