
Abstract
To study the nonlinear vibration behaviors of rotor system coupled with floating raft-airbag-displacement restrictor under ship heaving motion, the dynamic model is established considering the effect of heaving motion, its steady-state responses are numerically obtained using Runge-Kutta method and the results are surveyed by tools such as the spectrum waterfall diagram, time-domain response, frequency-domain response, axis orbit, and Poincaré map. The effects of rotating speed, ship heaving amplitude, and its frequency on the nonlinear dynamic behavior of the system are mainly studied. The results show that the responses of the rotor and raft are of obvious nonlinear behaviors such as amplitude jumping, bifurcation, and chaos due to the effects of nonlinear oil film force and ship heaving motion. With the increase of rotating speed, the motion of rotor and raft presents quasi-periodic and chaotic vibrations. Ship heaving amplitude and its frequency all have great effect on the vibration of rotor and raft; as heaving amplitude or frequency increases, the motion state of rotor and raft changes, and the amplitude of raft increases significantly. The displacement restrictor can effectively limit the vibrating displacements of the raft when ship heaving amplitude or its frequency is large.
Keywords
Introduction
Ship heaving motion is a common form of ship motion, which has the characteristics of large motion amplitude and low frequency and has a great effect on the safety and applicability of marine equipment.1,2 The vibration generated by marine rotating machinery seriously threatens the concealment of ships and the comfort of staff; therefore, it is of great importance to study the dynamic behaviors of the core component rotor-bearing system. Moreover, it is also necessary to assemble the floating raft isolation device to realize the vibration control of the rotor-bearing system. However, with ship heaving motion action, the vibration of rotor and raft will be affected by the heaving inertial force, and it is urgent to realize parameter optimization and vibration control of the system. Thus, it is vital to study the nonlinear vibration behaviors of the marine rotor system coupled with floating raft-airbag-displacement restrictor under ship heaving motion.
In recent years, many scholars have made useful explorations on rotor-bearing system dynamics considering the base motion. For instance, Zhu and Chen3,4 established the dynamic model of the rotor-bearing system under arbitrary maneuver flight conditions based on Lagrange’s equation, and they studied the effect of maneuvering flight on the dynamic characteristics of the rotor-bearing system by the numerical calculation. And Hou et al.5–7 considered the influence of aircraft maneuvering flight on the vibration of rotor-bearing system, assuming that the support of the bearing on the rotor is Duffing nonlinear support and the maneuvering flight is sinusoidal flight, the dynamic equation is derived and solved by the multiple scale method, and the response and bifurcation characteristics of the system are analyzed. Furthermore, Qiu et al. 8 and Yi et al. 9 established a finite element model of the rotor-bearing system under base angular motion and studied its dynamic behavior considering the effect of time base angular motion on the dynamic behaviors of the asymmetric rotor-bearing system. Considering the effect of base motion, a dynamic equation of rotor system supported by squeeze film damper under base excitation was established by Chen et al.,10–12 and the dynamic characteristics of the system were studied, and Gao et al.13,14 analyzed the dynamic characteristics of aero-engine rotor system under maneuvering flight from theoretical simulation and experimental perspectives. The above researches are all about the dynamic behaviors of the rotor-bearing system considering base motion in the airborne field.
The motion of the ship has the characteristics of large amplitude and period under the effect of wind and wave, which is quite different from the maneuvering flight of the aircraft. More and more studies on the dynamics of the shipboard rotor-bearing system considering the base motion. For example, Soni et al.15,16 considered the effect of the ship’s foundation excitation on the rotor system that is supported by the magnetic bearing; then, they used Floquet-Liapunov theory to analyze the stability of the system and studied the dynamic behavior of the rotor system under base motion. Considering the effect of pitching and rolling motion on the dynamic characteristics of a marine rotor-bearing system, a dynamic model of the system was established by Zhang et al., 17 and the nonlinear dynamic behaviors of the system were studied. Han and Li 18 and Du and Li 19 considered the effect of heaving motion on the dynamic characteristics of a rotating machinery system, and the dynamic behavior of rotating machinery system under heaving motion was studied by numerical method and multiple scale method. All of the above studies paid attention to the dynamic behaviors of the rotor-bearing system under base motion.
Because the floating raft-airbag vibration isolation device has the characteristics of low natural frequency, large bearing capacity and flexible structure, it is widely applied in the vibration control of marine rotating machinery. 20 For instance, Fang et al.,21,22 Jiang et al., 23 and Lei et al. 24 studied the vibration characteristics of rotating machinery coupled with floatingraft-airbag vibration isolation device. Fang et al.21,22 analyzed the vibration transmission characteristics of a floating raft isolation system on the average method to obtain the approximate theoretical solution. And Jiang et al. 23 took the floating raft active vibration isolation system as the research object and realized effective vibration control based on vibration acceleration and changes in vibration acceleration. In order to control the severe vibration problem of the heavy compressor, Lei et al. 24 proposed a composite vibration control method, which used the floating raft isolation system and particle dampers to achieve effective vibration control.
There are few studies on rotor-bearing system dynamics considering both base motion and floating raft vibration isolation. With ship heaving motion action, the dynamic behaviors of the rotor system and the damping performance of the floating raft-airbag vibration isolation device need to be studied. Hence, in this study, we consider the effect of ship heaving motion on the dynamic behaviors of the marine rotor-bearing system coupled with floating raft-airbag-displacement restrictor structure. A dynamic model of the system is established and solved by a numerical method. Moreover, we focus on the effects of rotating speed, heaving amplitude and its frequency on the dynamic behaviors of the system.
Dynamic model
Dynamic differential equations
A typical model of marine rotor system coupled with floating raft-airbag-displacement restrictor under heaving motion is shown in Figure 1, in which

The schematic diagram of rotor system coupled with floating raft-airbag-displacement restrictor under ship heaving motion: (a) Ship heaving motion and (b) coordinates of rotor system coupled with floating raft-airbag-displacement restrictor.
For the rotor system coupled with floating raft-airbag-displacement restrictor, here are the following assumptions: (1) The rotor is rigid, and its mass of disk is
According to the Newton Second Law, the dynamic differential equation of rotor system coupled with floating raft-airbag-displacement restrictor under ship heaving motion can be obtained
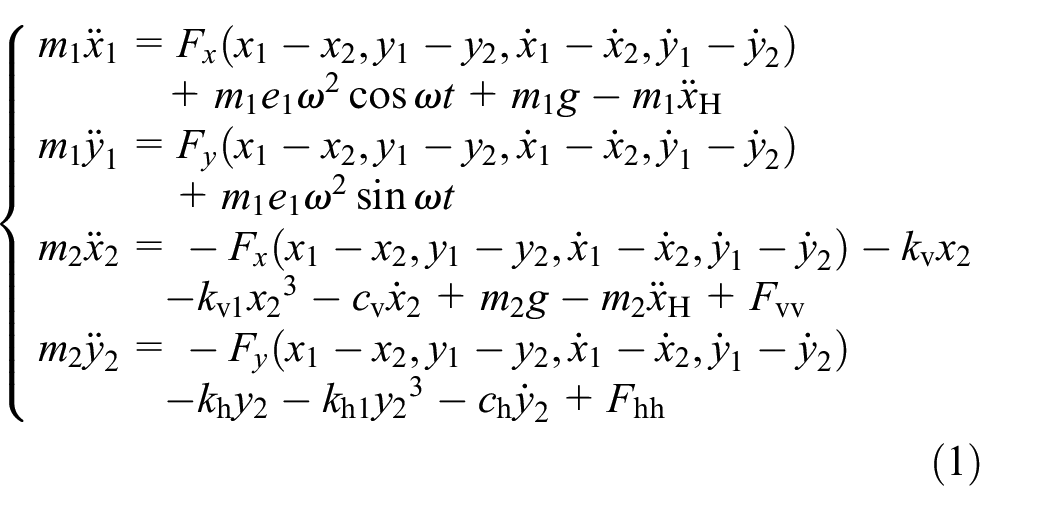
in which

where
Figure 2 shows the schematic diagram floating raft-airbag-displacement restrictor structure. The displacement restrictor will provide the vertical elastic force

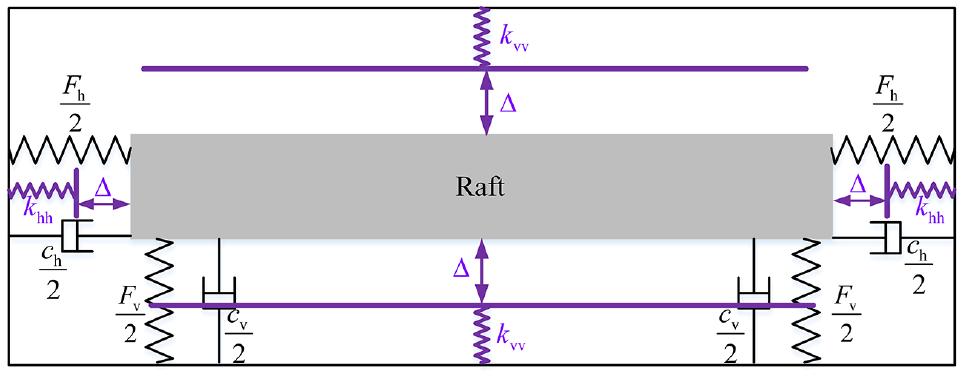
The schematic diagram of floating raft-airbag-displacement restrictor structure.
where

By simplifying equation (1), we can obtain

in which

where
Bearing oil film force
The structure diagram of the journal bearing, see in Figure 3. The transient oil film pressure distribution


The diagram of journal bearing.
in which
According to the short bearing assumption and semi-Sommerfeld boundary condition, the oil film force expressions of bearing with the radial and tangential directions10,11,18

in which

The expression of oil film force in the

in which
Dimensionless equation
In order to eliminate the influence of physical units, the time scale
The dimensionless parameters.

Dimensionless to equation (5), and the dimensionless equation of the system under ship heaving motion can be obtained

in which

where

moreover,

where

where
Numerical solution and simulation
Numerical simulation
The dimensionless dynamic equation of the rotor system coupled with floating raft-airbag- displacement restrictor under heaving motion, which has four degrees of freedom, is obtained in Section 2. It is extremely difficult to obtain the analytical expression of the system solution because the bearing oil film force has strong nonlinear characteristics and the displacement restrictor provides the piecewise linear elastic force. In this study, we use the Runge-Kutta method to solve the dimensionless differential equation, and the steady-state response of the system can be obtained. The coordinates
The dimensionless parameter values of the rotor system coupled with floating raft-airbag- displacement restrictor.

The values range of dimensionless parameters for ship heaving motion.

Figure 4 shows the steady-state response of the system when

The steady-state response of the system when
Figure 5 depicts the steady-state response of the system when

The steady-state response of the system when
Effect of rotating speed
The rotating speed directly affects the nonlinear characteristics of oil film force, and its effect on system dynamics needs to be specifically analyzed, especially when the system under ship heaving motion. In order to reflect the effect of the rotating speed on the dynamic behaviors of the system, we take the parameter values
The relationship between the amplitude of the system and the rotating speed during the acceleration and deceleration process is shown in Figure 6. In order to save the calculation time, we take the last set of values obtained from the previous rotating speed calculation as the initial value of the next rotating speed calculation. From Figure 6(a), with the change of the rotating speed, the amplitude of the rotor has three resonance peaks, and the first resonance peak where rotating speed

The amplitude of system and rotating speed curve during the acceleration and deceleration process: (a) the amplitude of the rotor and (b) the amplitude of the raft.
Figure 7 illustrates the spectral waterfall diagram of the system when the rotating speed changes. From Figure 7(a), when the rotating speed is low, the spectrum of the rotor response presents a large amplitude of the rotating frequency

Spectral waterfall diagram of the system when the rotating speed changes: (a) rotor and (b) raft.
Figures 8 to 11 describe the steady-state responses of the rotor when the rotating speeds

The steady-state response of the rotor when

The steady-state response of the rotor when

The steady-state response of the rotor when

The steady-state response of the rotor when
Comparing Figure 9(a) with Figure 8(a), we can find that the amplitude of the rotor in Figure 9(a) is larger than that in Figure 8(a). As shown in Figure 9(a), the rotor orbit is “banana shape,” and there are two closed curves on the Poincaré map which means there is the bifurcation phenomenon before
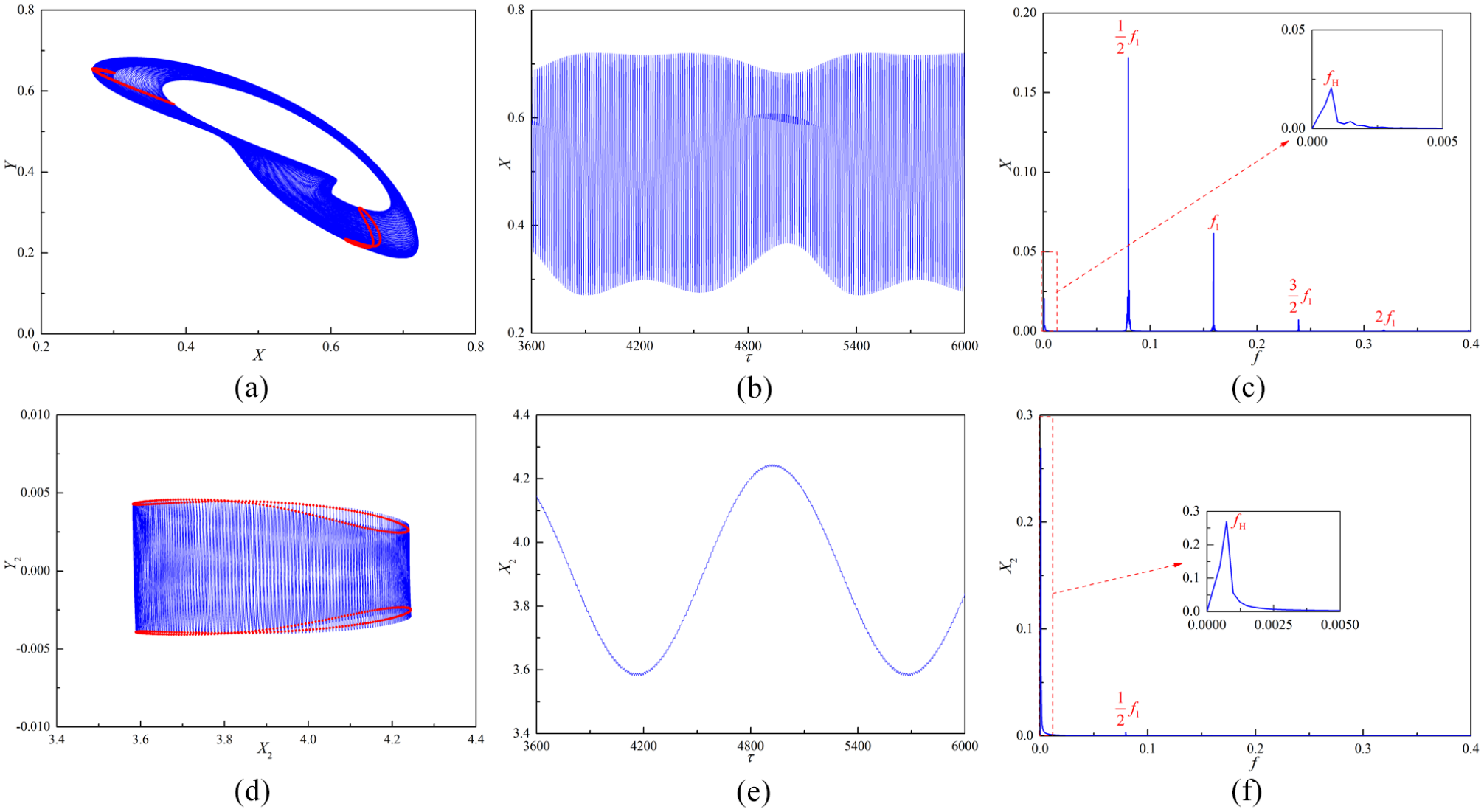
Comparing Figure 10(a) with Figure 9(a), it is easy to find that the amplitude of rotor in Figure 10(a) is smaller than that in Figure 9(a). As shown in Figure 10(a), the rotor orbit is an “elliptical ring” composed of multiple elliptical lines, and there is a closed curve on the Poincaré map. In Figure 10(c), the spectrum of the rotor response presents a large amplitude of the rotating frequency
From Figure 11(a), the rotor orbit seems regular but never repeats, and there are many scattered points on the Poincaré map. From Figure 11(b), the change of the displacement of the rotor with time is irregular. As shown in Figure 11(c), the spectrum of the rotor response is continuous and has multiple spectrum components. At this rotating speed, the vibration of the rotor and the raft appears as chaotic vibration.
In short, the system under ship heaving motion, with the change of rotating speed, the response of rotor and raft show obvious nonlinear characteristics such as amplitude jump, bifurcation, and chaos; and the nonlinear characteristics of oil film force are reflected when
Effect of ship heaving parameters
Heaving amplitude and frequency are essential characterization parameters of ship heaving motion, and their changes will affect the vibration of the whole system. In this section, we mainly study the dynamic behaviors of the marine rotor-bearing system coupled with floating raft-airbag-displacement restrictor under ship heaving motion when the heaving amplitudes and frequencies change.
Effect of heaving amplitude
To reflect the effect of heaving amplitude on the dynamic behaviors of the system, we take the parameter value heaving frequency
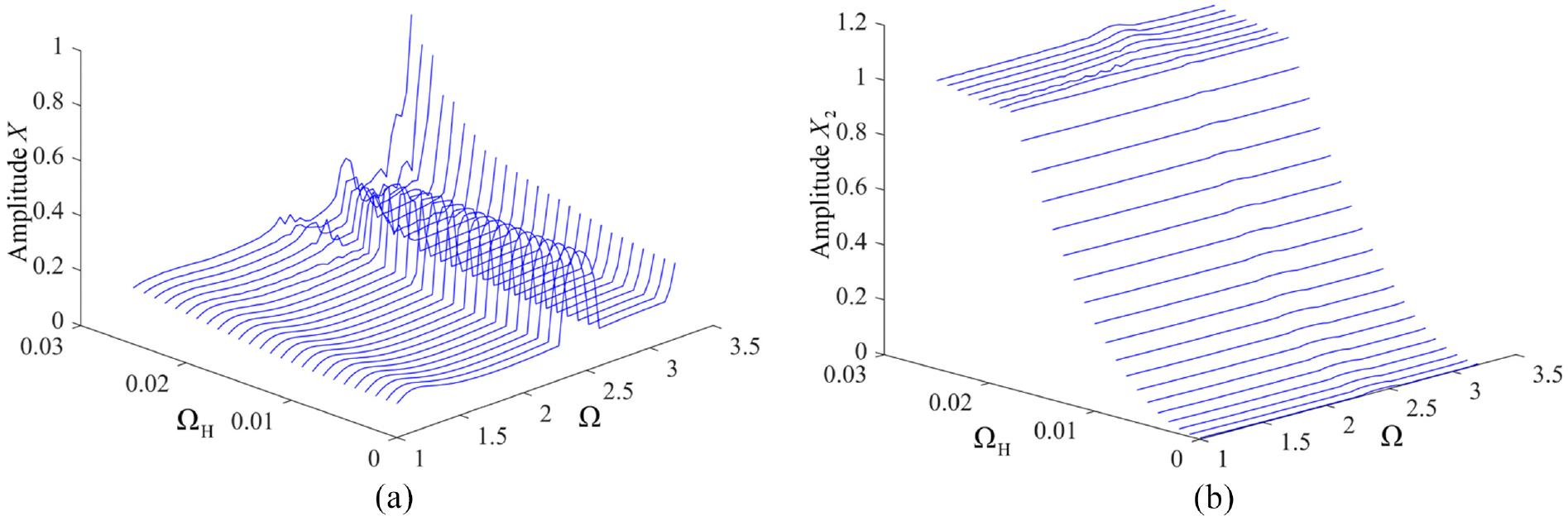
Figure 12 depicts the relation of system amplitude with rotating speed and heaving amplitude. As shown in Figure 12(a), the rotor amplitude and rotor speed curves at different heaving amplitudes have similar topological structures when the heaving amplitude

Waterfall diagram of system amplitude varying with rotating speed
Figure 13 indicates the system amplitude and heaving amplitude curves at different rotating speeds. From Figure 13(a), when the rotating speed

The relationship between the amplitude of the system and heaving amplitude at different rotating speeds: (a) rotor and (b) raft.
Figure 14 shows the amplitude of the system and the ship heaving amplitude curve when

The relationship between the amplitude of the system and heaving amplitude: (a) the amplitude of the rotor and (b) the amplitude of the raft.
Figure 15 indicates the amplitude of the system and heaving amplitude curve during processes of heaving amplitude increasing and decreasing when

The relationship between the amplitude of the system and heaving amplitude during processes of heaving amplitude increasing and decreasing: (a) the amplitude of the rotor and (b) the amplitude of the raft.
The spectral waterfall diagram of the system when the heaving amplitude changes (when

Spectrum waterfall diagram of the system when heaving amplitude changes: (a) rotor and (b) raft.
Figure 17 describes the steady-state response of the system when
The steady-state response of the system when
The steady-state response of the system when

The steady-state response of the system when
Effect of heaving frequency
In order to study the effect of heaving frequency on the dynamic behaviors of the system, we take the parameter value
Figure 19 indicates the relation of system amplitude with rotating speed and heaving frequency. As shown in Figure 19(a), the rotor amplitude and rotor speed curves at different heaving frequencies have similar topological structures when the heaving frequency
Waterfall diagram of system amplitude varying with rotating speed
Figure 20 shows the system amplitude and heaving frequency curves at different rotating speeds. From Figure 20(a), when the rotating speed

The relationship between the amplitude of the system and heaving frequency at different rotating speeds: (a) rotor and (b) raft.
As shown in Figure 20(b), before the raft collides with the displacement restrictor, as the heaving frequency increases, the raft amplitude increases nonlinearly; however, the raft amplitude increases slightly with the increase of heaving frequency when
Figure 21 illustrates the amplitude of the system and ship heaving frequency curve when

The relationship between the amplitude of the system and heaving frequency: (a) the amplitude of the rotor and (b) the amplitude of the raft.
Figure 22 shows the amplitude of the system and heaving frequency curve during processes of heaving frequency increasing and decreasing (when

The relationship between the amplitude of the system and frequency during processes of heaving frequency increasing and decreasing: (a) the amplitude of the rotor and (b) the amplitude of the raft.
The spectral waterfall diagram of the system when the heaving frequency changes (when

Spectrum waterfall diagram of the system when heaving frequency changes: (a) rotor and (b) raft.
The steady-state response of the system when

The steady-state response of the system when
Figure 25 shows the steady-state response of the system when

The steady-state response of the system when
Conclusions
The dynamic characteristics of the rotor system coupled with floating raft-airbag-displacement restrictor under ship heaving motion are studied. We established the dynamic model of the system under ship heaving motion, and its nonlinear dynamic behaviors are mainly investigated. The conclusions are drawn as follows:
The response of rotor and raft under the ship heaving motion, the amplitude is larger than that without above motion, and the motion state becomes complex; for example, there exists the jumping phenomenon, bifurcation behavior and chaotic oscillation.
With the increase of heaving amplitude, the rotor amplitude and heaving amplitude curves corresponding to different rotating speeds are different, and there exists the amplitude jumping phenomenon in the response of the rotor; the amplitude of the raft is almost linearly increasing before it collides with the displacement restrictor.
As the heaving frequency increases, the variation of rotor amplitude with heaving frequency at different rotating speeds is different, and there is a jump phenomenon in the rotor amplitude; moreover, the amplitude of the raft increases nonlinearly before the collision with the displacement restrictor.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research work described in the paper was supported by the National Natural Science Foundation of China (Grant nos. 11972282 and 12002267).