
Abstract
At present, there are some problems that need to be solved in crane steel structure design, such as heavy self-weight of finished structure, high production energy consumption, and huge manufacturing costs. In view of this, a lightweight design method that meets the green product design principle is proposed for crane structure. In this method, an improved new swarm intelligence optimization algorithm named the multi-specular reflection algorithm (M-SRA) is proposed. This algorithm combines the specular reflection algorithm (SRA) with the traditional swarm intelligence optimization algorithm, which has higher computational efficiency. After that, M-SRA is applied to crane steel structure optimization. The results show that the improved algorithm has higher global searching ability and computational efficiency than traditional population intelligence optimization algorithms. The research in this paper provides a reliable design method for the green lightweight design of crane steel structure and a reference for the green design of mechanical products.
Introduction
In the manufacturing industry, cranes are important material handling equipment, which can be widely used in engineering construction and material handling processes. Due to the rapid development of the global economy, mechanical design and manufacturing technology are also continuously upgrading, which accelerates the urgency of crane development. As one of the most common lifting equipment, general bridge cranes are widely used in various fields, including: machinery manufacturing, material handling, product maintenance, and so on. The steelstructure of one crane means its basic force-bearing component, and the quality of steel structure is a decisive factor for safety performance for a crane. In recent years, lightweight, low energy consumption, and intelligence have become the direction of crane manufacturing technology. However, in order to solve the problem of complicated crane working load and huge impact caused by large speed changes, designers often choose a larger safety factor, which leads to greater structural design redundancy, excessive crane weight, unreasonable structure, and low material utilization. High energy consumption and other shortcomings increase the using cost of one crane, and lead to a huge consumption of ecological resources and giant discharge of pollutants. Considering the above problem, the need for a green and lightweight design of cranes is more pressing.
At present, the lightweight of cranes is mainly in terms of structure optimization. Design methods such as topology optimization, shape optimization, and size optimization are used to optimize the steel structure of the crane or its parts. There are many studies that have explored the above problems. Li et al. 1 established a rapid lightweight design system for cranes, which integrated zero-order optimization, parameter rounding, and partial secondary optimization after rounding, so that the weight of the crane structure is reduced by 10% and the cost is saved. Li and Liu 2 adopted the design method of super-element global modal parameterization, and they carried out lightweight design of crane frame structure. Deng et al. 3 took the trackless telescopic gantry crane structure as the research object, through ANSYS software, the weight of the crane steel structure is optimized by 23.4%, which improves the utilization rate of materials
Xiao et al. 4 adopted the topology optimization method to carry out the lightweight design of the crane gearbox, which verified the rationality of the box improvement method. Jiao et al.5,6 established a mathematical model for periodic topology optimization of the main girder, taken the volume as the constraint and the minimum flexibility as the goal, this method provides a reference for the optimization of the size and shape of the general bridge crane. Li and Liu 7 used super-element technology combined with topology optimization technology to optimize the crane frame structure, and used finite element analysis and fatigue tests to verify that the super-element method can handle complex structures.
Although the topology optimization method can acquire a lighter crane steel structure and achieve the purpose of lightweight, the complexity of the crane structure’s topology shape increases the difficulty of the manufacturing process. Different from topology optimization, size optimization of the whole crane or its parts is more common in the field of structural optimization. Qu et al. 8 combined the ant colony algorithm with mutation-based local search (ACAM), and the optimization efficiency is better than other intelligent algorithms. Fan and Zhi 9 applied the RBDO method to the actual crane structure to balance economy and safety, and the convergence speed was increased by three times. Tang et al. 10 used the advantages of the Latin hypercube design, BP neural network, and Hooke-Jeeves three design methods to propose a more efficient crane optimization method. Savković et al. 11 used the firefly algorithm, bat algorithm, and cuckoo search algorithm to optimize the design of single-girder bridge crane steel structures, and revealed the advantages and disadvantages of each algorithm in solving the crane steel structure. However, the constraints of material fatigue, manufacturing technology, and economic costs are not considered.
Since the determination of the design parameters of the main girder of the crane is a very complicated task, considering the constraints introduced in the optimization process, the selection problem of the optimization algorithm will arise. Neither traditional optimization methods nor direct search methods can give accurate solutions in the global optimal area. Fortunately, modern intelligent optimization algorithms can quickly and accurately find the optimal solution in the global area. In the field of modern intelligent optimization algorithms research: Prayogo et al. 12 proposed a new hybrid meta-heuristic algorithm – (DBB-BC), this algorithm improves the exploration and exploitation capabilities of the original BB-BC algorithm, especially in Looking for global solutions. Oliveira and Pessoa 13 proposed an improved branch-Cut-and-Price algorithm for Parallel Machine Scheduling Problems. Tawhid and Savsani 14 proposed a new artificial algae algorithm, which can be used to solve multi-objective engineering optimization design problems. Arora and Singh 15 proposed a butterfly optimization algorithm by simulating the behavior of butterflies looking for food and mating. Hakli 16 proposed an improved algorithm based on the traditional elephant group optimization algorithm (EHO).17–19 Inspired by (PSO) search operator, Wang et al. 20 improved the artificial bee colony algorithm to handle the proposed dual-objective optimization model. Gu et al. 21 designed an adaptive step size control factor to control the search range of the evolution phase of the algorithm, and proposed a multi-neighborhood local search method to search the high-quality solution region. A hybrid cuckoo search algorithm (HCSA) is proposed. In addition, there are cuckoo and its improved algorithm,22–26 whale algorithm,27–29 wolf pack algorithm,30–32 lion algorithm,33–36 monkey algorithm,37–39 dolphin algorithm, 40 etc. The above algorithms provide a reference for the optimization of engineering products.
The algorithm-based lightweight design method of the main girder has been relatively established in theoretical application, but there still remain some shortcomings. From the perspective of the research object, the researchers not only didn’t make detailed steel structure design on a specific model of crane, but also didn’t consider the influence of the simplified structure model on the calculation results. From perspective of the verification method, the structural stress test of the crane under actual work hasn’t been carried out, and most of the researches are analyzed and verified by finite element or similar theoretical models, which leads to the partiality, contingency, and incompleteness of the research results. In this paper, through a combination of theoretical analysis and experimental verification, the lightweight design of the crane’s main girder structure is carried out. A dynamic loading test was carried out on the main girder structure of the crane, which verified the rationality of the simplified structural model. The best results were found in the lightweight design of the crane, while meeting the requirements of the design specifications, thus decreasing the use of materials. This paper provides a scientific and effective design method for the green design of crane steel structure.
Multi-specular reflection algorithm (M-SRA)
Introduction to M-SRA
M-SRA is a new type of hybrid intelligent optimization algorithm, which is evolved from the Specular Reflection Algorithm.41,42 Early versions of various swarm intelligence algorithms usually occur premature, and the best results can be achieved by making certain corrections or combining with other algorithms. Like the Specular Reflection Algorithm (SRA), the principle of M-SRA is to simulate the reflection phenomenon of light from the mirror surface, and the observer finds the target object through this natural phenomenon. The practical meaning of the M-SRA is shown in Figure 1. In the design space, all single-specular reflection models are used to find the target object (the book in Figure 1). But in some extraordinary cases, the target object is difficult to be found. In this case, it needs the help of mirrors to change the direction of light propagation in order to find the target object.

The schematic diagram of M-SRA.
Taking the minimization optimization problem as an example, the M-SRA is used to optimize the design of the actual problem. The calculation process is as follows:
(1) Randomly search for initial feasible solutions
(2) According to the known initial feasible solution, the number of specular reflection models is determined as n, and each specular reflection model contains three subjects: mirror, specular reflection image, and observer.
(3)
(4) According to the value of

(5) According to the current specular reflection model, search for the target object in the feasible space.


Where rand is a function that can generate random numbers uniformly distributed between (0, 1),
(6) Compare the objective function values of the two new solutions, choose the better parameter of the two as the new solution

(7) The way to update the current specular reflection model is shown in Table 2, that is, the update strategy of the search point;
(8) Set the stopping criterion and judge whether the algorithm satisfies the stopping criterion. If so, stop the calculation and output the best solution, otherwise return to step 5 to continue the calculation.
Define the specular reflection model.

Update the specular reflection model.

The flow chart of M-SRA is shown in Figure 2.
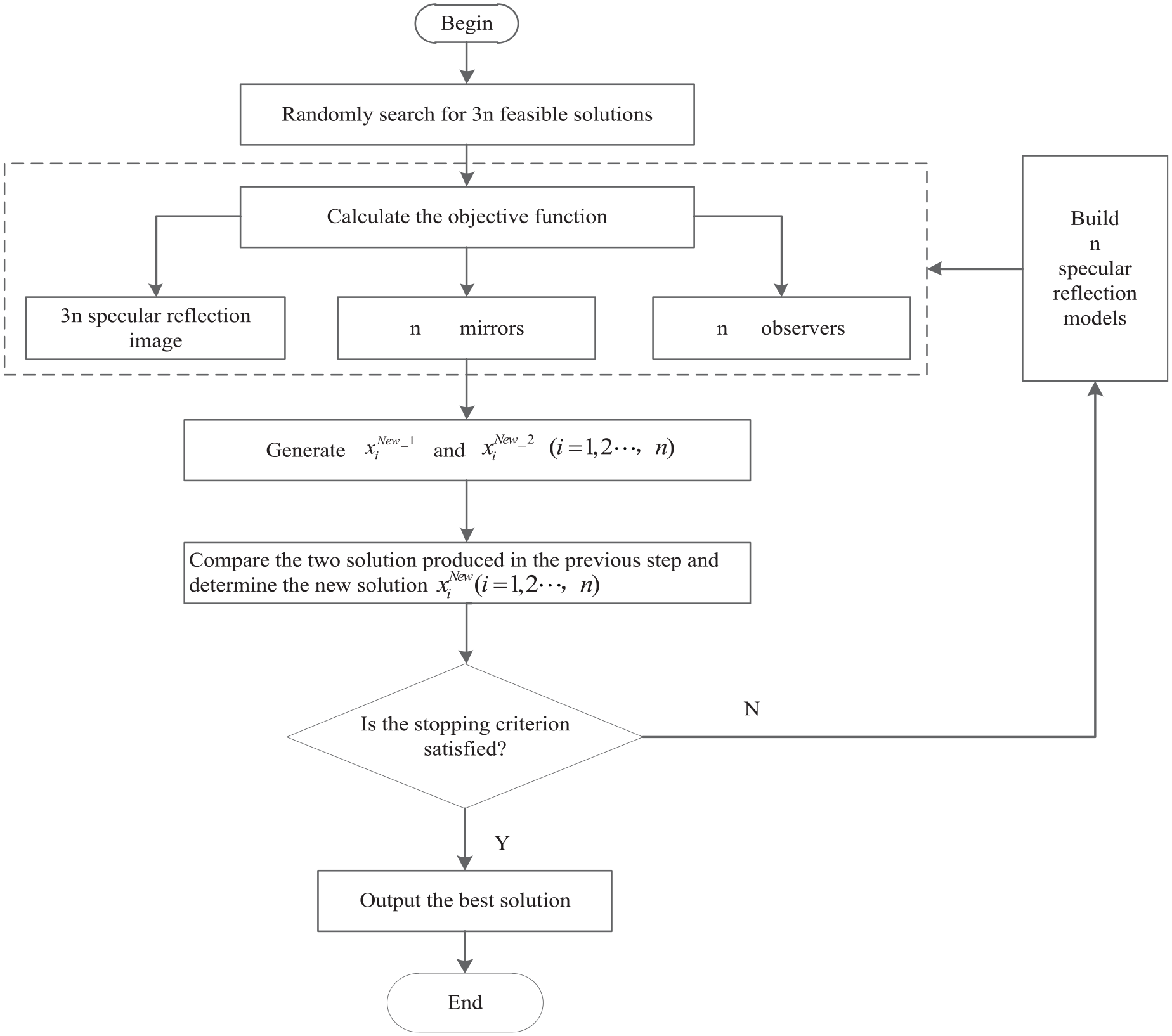
The flow chart of M-SRA.
Analysis of algorithm computing power
In order to verify the calculation performance of the M-SRA, four classic optimization algorithm test functions are used. The four test functions are shown in Table 3
Test function.
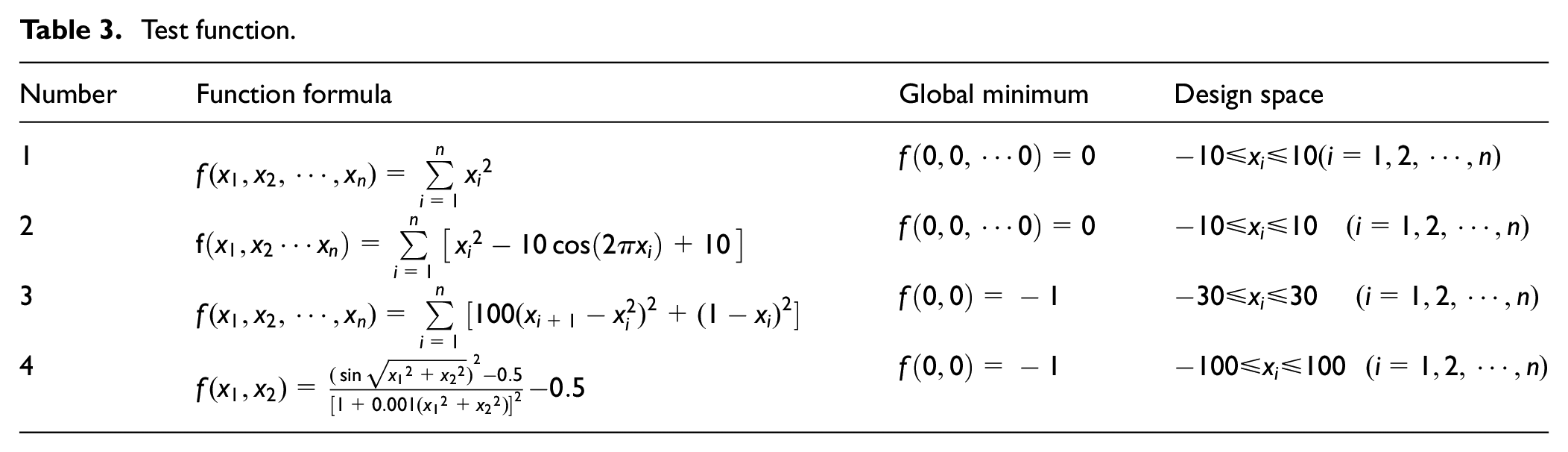
The SRA and the M-SRA are respectively used to analyze the above four test functions. MATLAB software is used to write a special optimization test program. This program verifies the calculation ability of M-SRA algorithm from two aspects: different design space dimensions and different mirror numbers, run independently 100 times, the optimization results are shown in Table 4. The number of iterations and calculation time in the table are the average of 100 results, the optimal solution is the best value among the 100 optimization results, and vice versa is the worst solution. The stopping criterion of the algorithm iteration is shown in equation (5), which is determined by the maximum number of iterations and the iteration accuracy.

Where It is the maximum number of iterations, F is the current fitness value, BF is the fitness value of the previous generation. The fitness is the function value corresponding to the search point in the algorithm optimization process.
Optimized calculation results.

M is the number of mirrors in the M-SRA, and n is the dimension of the design space.
This paper evaluates the algorithm performance from three aspects: calculation time, optimal solution accuracy, and robustness, and the results are shown in Table 4.
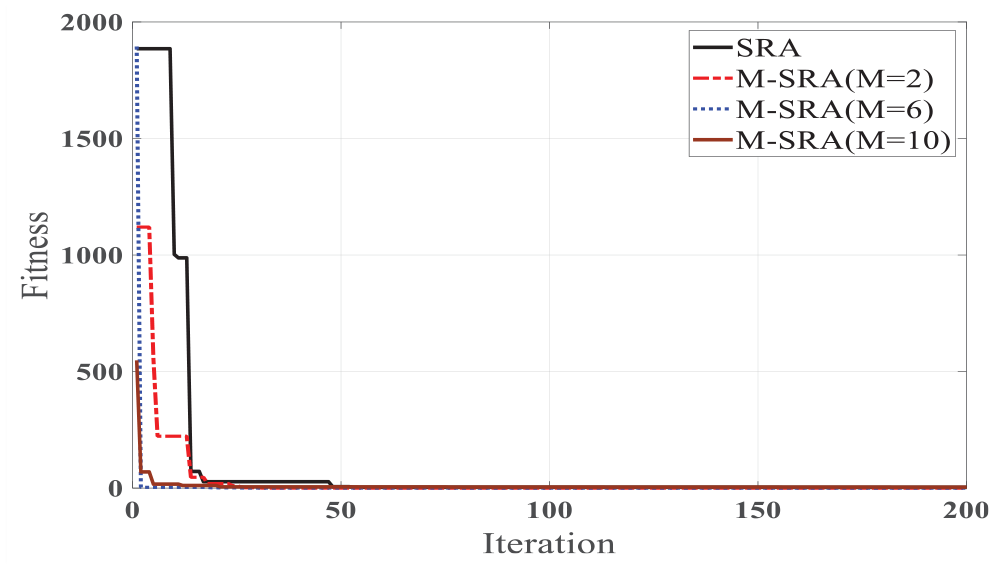
As can be seen from Table 4, as the number of mirrors increases, the iteration speed of the algorithm is significantly reduced, which proves that the improved algorithm is more efficient in a single iterative search, and it is easier to find the optimal solution. However, it can be found that the calculation time has increased slightly. The reason is the increase in the number of mirrors. The number of mirror reflection models and the number of search points in each search process also increase. The calculation amount of each search process will increase correspondingly, which will eventually cause an increase in calculation time. As shown in Table 4, the calculation efficiency of the improved algorithm (M-SRA) is better than that of the SRA algorithm. The improved M-SRA can significantly improve the search speed and accuracy of the algorithm.
Figures 3 to 12 are the average optimal fitness evolution curves of the SRA and the M-SRA when optimizing the four test functions.

Iterative curve of test function 1 (n = 2).
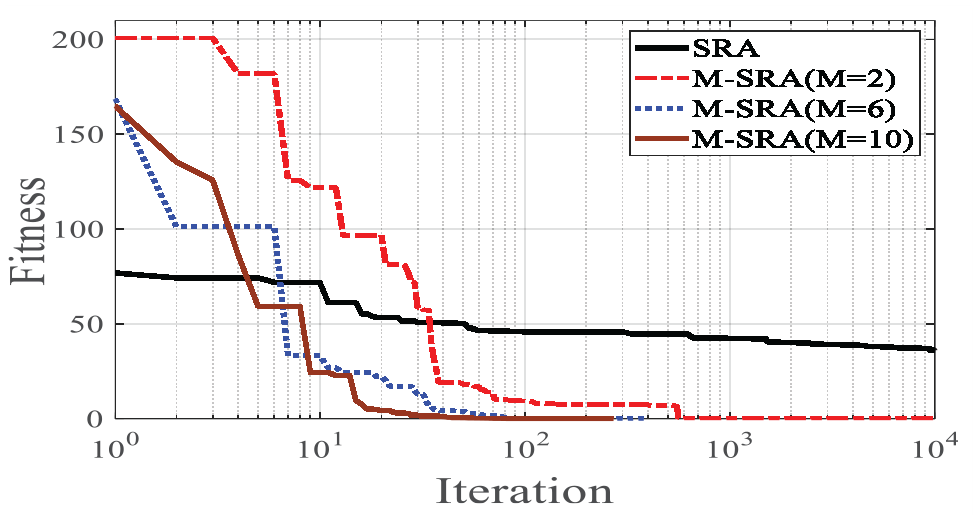
Iterative curve of test function 1 (n = 10).

Iterative curve of test function 1 (n = 30).

Iterative curve of test function 2 (n = 2).

Iterative curve of test function 2 (n = 10).

Iterative curve of test function 2 (n = 30).
Iterative curve of test function 3 (n = 2).

Iterative curve of test function 3 (n = 10).

Iterative curve of test function 3 (n = 30).
Iterative curve of test function 4 (n = 2).
Steel structure design and lightweight of general bridge crane
Bridge crane is horizontally mounted over the workshop, warehouse, and factory for material lifting. It is the most widespread crane model, which is widely used. The general bridge crane structure as shown in Figure 13 is taken as the research object.
General bridge crane.
Firstly, the traditional stress ratio method is used in the structural design of crane to obtain a reliable and precise design method of crane steel structure, and the accuracy of the calculation method is determined through the crane load experiment. According to theoretical calculations and experimental results analysis, the design method adopted in this paper has high accuracy, and the safety and reliability of the crane structure can be guaranteed. Finally, the M-SRA mentioned above is used to lightweight design the main girder structure of crane to achieve the minimum structure weight on the premise of qualified structural design indicators. Under this method, the consumption of materials and energy is reduced, and the ecological protection of products is improved.
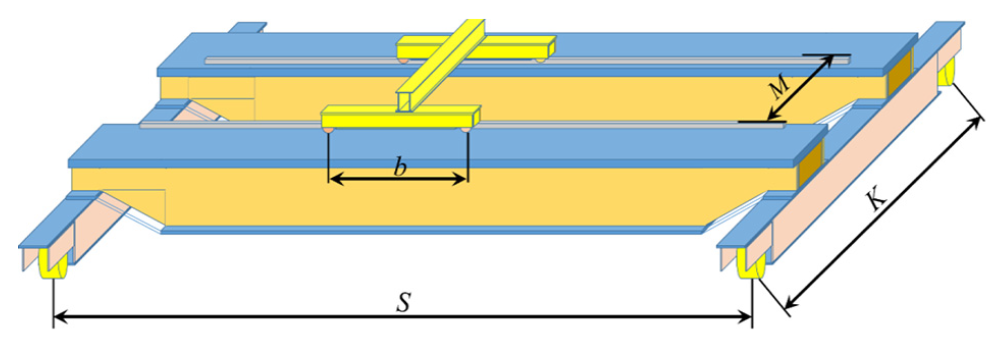
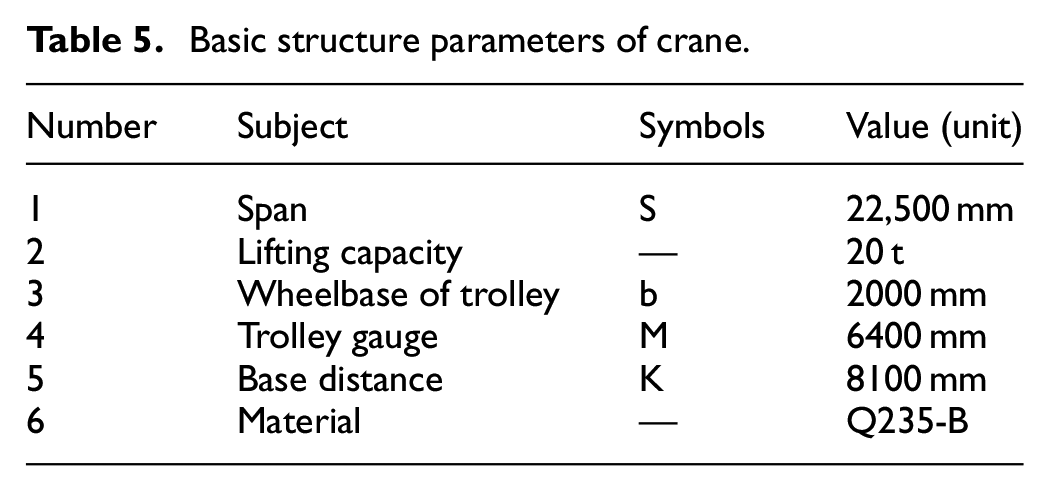
The overall design parameters of the general bridge crane are shown in Table 5. The main girder section of the crane adopts the bias railed box girder structure as shown in Figure 14, that is, the trolley running track is installed on the top flange plate directly above the main web.
Basic structure parameters of crane.

Mid-span section of main girder.
Steel structure design of crane main girder
The load capacity of the crane mainly depends on its main girder structure, which directly takes the load caused by goods and trolley. Therefore, the quality of the crane structure is directly affected by the design level of the main girder structure. The main girder of the crane shall take the fixed uniform load


Mechanical model of the main girder in the vertical direction.
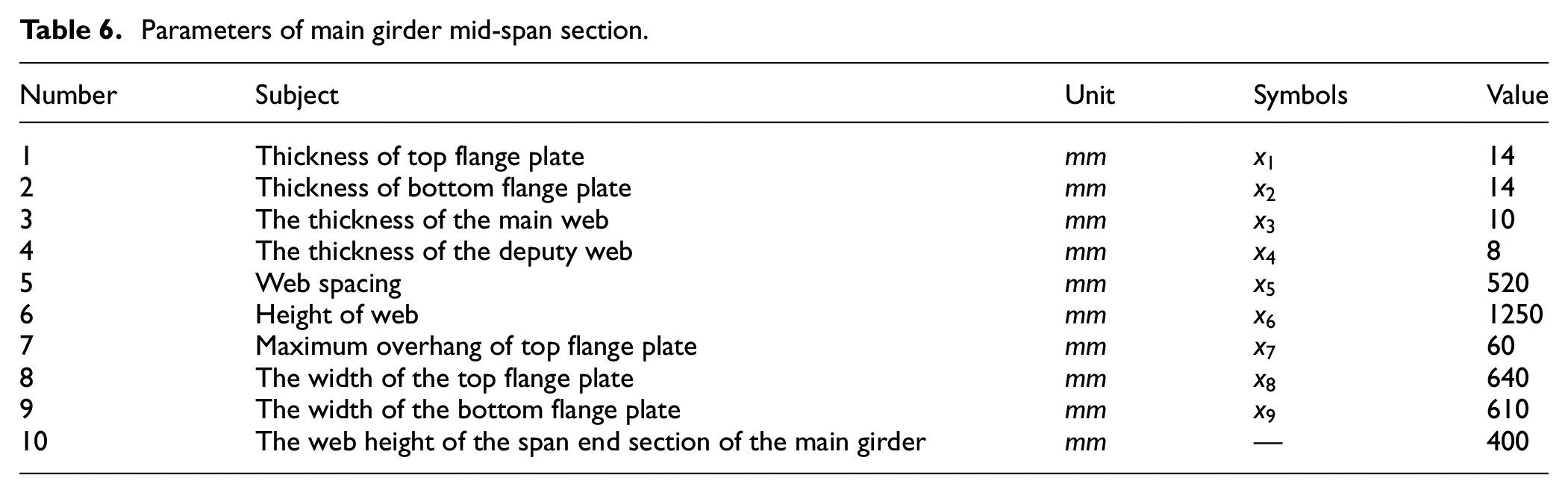
Parameters of main girder mid-span section.
Where
When the crane is started or stopped, it will cause the bridge, the trolley, and the goods to induce horizontal inertial loads. Therefore, in the horizontal direction, the main girder structure also needs to bear the horizontal inertial load along the traveling direction of the crane. The horizontal mechanical model of the main girder is shown in Figure 16.


Horizontal mechanical model of main girder.
Where

Where
According to the known mechanical model and known design parameters, the main girder steel structure of the crane is designed based on traditional mechanical methods. The distance from the wheel on one side of the fully loaded trolley to the end-span of the main girder is Lx (as shown in Figures 15 and 16), when the value of Lx is respectively equal to 11.25, 10.25, 9.25, 8.25, 7.25, 6.25, 5.25, 4.25, 3.25, 2.25, 1.25, and 0.25, calculate the static strength at the calculated point 1 (as shown in Figure 14) of top flange plate of main girder, and the results are shown in Table 7.

Where

Where

Where
Calculation result of static strength of main girder.

The normal stress caused by the bending moment is calculated according to equation (9).
The shear stress caused by the shear force is calculated according to equation (10).
The combined stress is calculated according to equation (11).
According to the calculation results in Table 7, the biggest stress of calculation points is 109.3234 MPa, which is less than the allowable stress (158.78 MPa), and the static strength of the structure meets the design requirements. Since the design margin of static strength is equal to
Crane model and load simplified verification experiment
In the optimization process, the structure of the crane is complex, and the simplification of the crane model is particularly important. The simplified model can often achieve better optimization results. In order to verify the accuracy of the structural calculation model and the load simplification adopted in this paper, a dynamic loading test was carried out on the crane main girder structure. The specific test plan is as follows: When the crane is not running, starting from the position of

Experimental site.
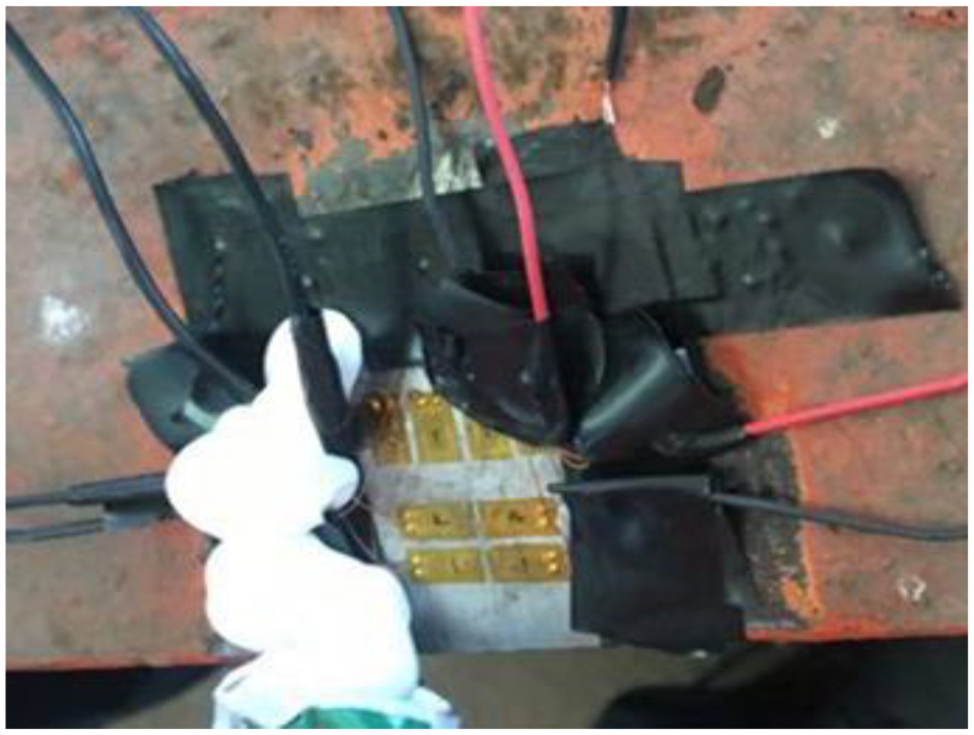
Installation of strain gauges on the experimental site.
In order to obtain the accurate normal stress of the main girder structure at the check point, the position of the strain gauges should be arranged accurately. When placing the strain gauges, it is necessary to try to avoid the strain gauges close to the main girder stiffeners, rails, and the joints of the plates. The layout of the strain gauges in this article is shown in Figure 19. This layout will enable the strain gauges to measure the normal stress (tensile stress) of the top flange plate in vertical direction.

Layout of main girder strain gauges.
The stress detection system is composed of strain gauges, AD data acquisition module, instrument power supply module, field data processing instrument, and data wireless transmission module. The system structure is shown in Figure 20. Since the self-weight load of the crane structure is inherent, the strain gauge can’t measure the structural stress caused by self-weight load during the structural stress test. In order to ensure the consistency of the calculation results and the experimental results of the main girder structure, the calculation results of the mid-span section of the main girder structure should be revised, and the revised results are shown in Figure 21. The abscissa in the figure is the distance that the trolley moves from the mid-span position (LX = 11.25 m) to the end-span of the main girder. The corrected stress calculation value at the calculation point of the mid-span section of the main girder structure is shown in the curve (a) of Figure 21.

Structure of detection system.

Stress curve of the measured point.
It can be seen from curve (a) that when the fully loaded trolley is positioned near the mid-span section of the main girder (the abscissa is 0–2), under the action of the fully loaded trolley wheel pressure, the maximum bending stress will be generated at the mid-span section of the main girder, and the maximum stress is 55.33 MPa. When the trolley gradually moves to the end-span of the main girder (the abscissa is 2–11.25), the cross-section stress at the mid-span shows approximately a linear downward trend, which is consistent with the law shown by the theoretical model used in this paper. The curve (b) shown in Figure 21 is the stress data measured on the experimental site, and the curve (b) shows the approximately same stress change trend as the curve (a). The experimental results show that under the same calculation conditions, the maximum relative error between the experimental results and the theoretical calculation results is always maintained below 6.59%, which is less than the actual allowable error (10%) in engineering. It can be seen that the calculation model of crane girder structure in this paper is correct, the strain gauge arrangement is reasonable, and the data collection results are accurate.
Lightweight design problems
Because the crane steel structure in this article has a large design margin, the structural materials have not yet fully utilized its performance, and it is necessary to make a lightweight design for the crane main girder structure.
The main girder structure of crane is taken as the experimental object, and its design variables are the combination of design parameters shown in Figure 14, which is shown in equation (12). The physical meaning of each variable is shown in Table 6:

Taking into account the actual production situation and requirements, in the optimization design, the six parameters shown in equation (11) need to be set as discrete variables, that is, by using the Round function, the initial position of the mirror and the new position generated (six design variables) are taken as integers, which ensures that each solution obtained is an integer solution, and the six variables need to meet the following design requirements respectively: ① The value of the design parameters
The optimization design of the crane main girder structure should include two constraints: one is the constraint of the main girder structure size, and the other is the constraint of the main girder structure design index, such as strength, stiffness, and stability. Due to the small span and low working level of the crane studied in this paper, the main failure mode of the crane girder is the static strength of the structure. Therefore, this paper only focuses on the static strength of the structure and overall stability constraints to carry out the optimization design of the main girder structure. The specific constraint indicators are shown in Table 8.
Constraints of the main girder structure.

In the optimization design problem, objective function is an important index to evaluate the design parameters. If the reasonable objective function is determined, the optimal solution can be more accurate. In the optimization design of crane girder structure, the ultimate goal of this paper is to minimize the self-weight of the structure

Where
Steel structure optimization of main girder
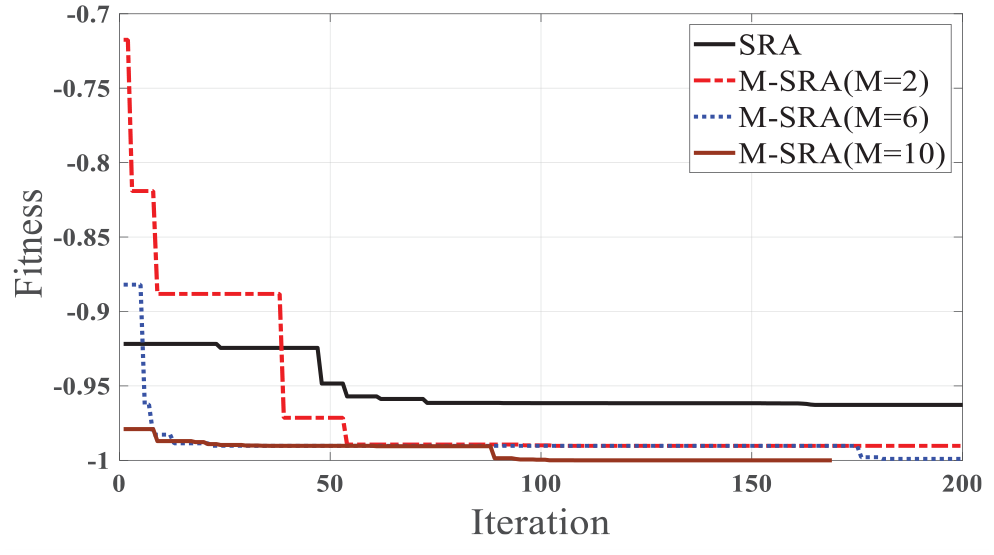
According to the determined optimization design model of the crane main girder structure, the SRA and the M-SRA (the number of specular reflection models is set to 2, 6, and 10 respectively) are used to optimize the model. The results of the optimized design are shown in Table 9. During the optimization process, the iterative curve of the objective function is shown in Figure 22. Since the minimum value of the optimization objective cannot be determined, the iterative termination condition of this optimization design is set as: the maximum number of iterations is 200.
Results of optimization design of main girder structure.

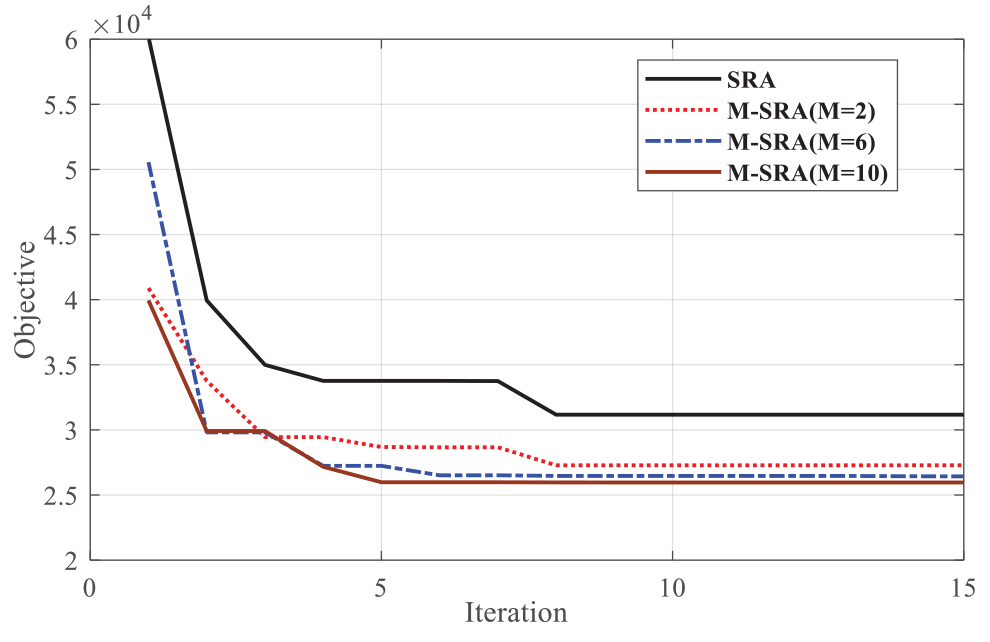
The iterative curve of the objective function of the crane girder structure optimization.
According to the calculation results in Table 9, each intelligent optimization algorithm has ability to obtain optimized solutions, the value of the optimized solution obtained by (SRA) is
Conclusion
Nowadays, green design has been widely concerned by researchers all over the world, although the theoretical method of realizing lightweight design of main girder through algorithm has been relatively established, but in the current research, the safety of the optimized crane structure is mostly verified by the finite element method or similar theoretical models. The verification in the study is not tested with specific actual models. The accuracy of the structural optimization design method is not fundamentally judged. In this paper, the M-SRA is proposed to optimize the steel structure of crane, and the accuracy of model simplification is verified by actual stress test. The main contributions of this paper are as follows:
By increasing the number of mirrors, the group advantage and global search ability of the algorithm are enhanced at the initial stage of the search; in the later stage of the search, the advantage of the strong local search ability of the specular reflection algorithm will be highlighted.
The method of combining theoretical analysis and experimental verification is used to design the crane main girder structure model. The stress curves of the measured points obtained by the two methods are approximately the same, which proves that the simplified crane structure design model in this paper is accurate.
The lightweight design of crane main girder structure is carried out by using SRA and M-SRA respectively. The results show that, compared with SRA, the performance and convergence speed of the M-SRA are greatly improved in solving discrete optimization problems in practical engineering.
There are still some shortcomings in the research content of this paper, and the following aspects can be improved in the future: The randomness of generating initial solution needs to be reduced; the research should include additional constraint functions, such as: fatigue of the material, influence of the manufacturing technology and economy; the objective function is single, and the mechanical structure can be optimized by multi-objective.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article was funded by the National Natural Science Foundation of China (51805348), Shanxi Provincial Applied Basic Research Program (201901D211287), the Science and Technology Innovation Project of Higher Education Institutions in Shanxi Province, and Shanxi “1331 Project” Key Subjects Construction.