
Abstract
In this paper, an electrothermal shape memory alloy helical spring actuator constructed from shape memory alloy with copper-cored enameled wire is presented and fabricated. Based on the shear constitutive model of a shape memory alloy, the Thermo equilibrium equation and the geometrical equation of helical spring establish the thermomechanical theoretical model of helical spring actuator with electrothermal shape memory alloys under different scenarios. The thermomechanical behaviors of the actuator were verified by numerical simulation with experimental tests, and the actuator thermomechanical properties were derived from the analysis with current, temperature, response time, restoring force, and axial displacement as parameters. The experimental results show that the actuator produces a maximum recovery force of 70.2 N and a maximum output displacement of 7.7 mm at 100°C. The actuator response time is 26 s at a current of 3A. It is also demonstrated that the theoretical model can effectively characterize the complex thermo-mechanical properties of the actuator due to the strong nonlinearity of the shape memory alloy. The experimental temperature-force response and temperature-displacement response, as well as the force-displacement response at different temperatures, provide references for the design and fabrication of electrothermal shape-memory alloy coil spring actuators.
Introduction
Shape memory alloys (SMA) are a class of smart alloy materials with shape memory effect (SME) and superelasticity. Smart actuators constructed from SMA can accomplish complex functions driven by stress or temperature, and because of the unique and excellent characteristics of SMA, such as compact structure, high power density, and high fatigue resistance to cyclic motion, SMA actuators have unique technical advantages in light-weight robots and miniaturized systems.1–3 The process by which SMA produces shape memory effect is that loading SMA transforms the austenite phase to stable non-twinned martensite phase when SMA is below the austenite phase transition temperature, heating SMA after unloading brings it to the austenite phase finish transition temperature, SMA reverses from non-twinned martensite to austenite phase and macroscopically shows that deformation gradually recovers after SMA heating.4–6 Smart components made of SMA-based shape memory effect are widely used in medical,7,8 control,9,10 mechanical,11,12 and Aerospace.13,14
SMA helical spring is a device that combines an actuator, a temperature sensor, and a displacement amplifier. Although the structure of the SMA spring is simple, the performance of the SMA spring is complex due to its strong non-linear thermomechanical properties.15–18 Ma et al. 19 analyzed a biased bidirectional SMA actuator composed of SMA spring and steel spring, and established the relationship of output displacement and force of SMA spring actuator with temperature, stress-strain, material parameters as well as dimensional parameters. Gédouin et al. 20 present a theoretical method for the analytical study of SMA helical spring actuators, which can effectively predict the thermomechanical behavior of linear biased spring actuators. Stachowiak and Kurzawa 21 proposed an SMA micro spring-driven rotary motor achievable to operate in a continuous and bi-directional rotation mode where the speed and torque are determined by the driving sequence. Wang et al. 22 perform finite element simulation on the training behaviors of SMA wave spring actuators, which provides an effective method for the design and optimization of SMA wave spring actuators.
Most of the above SMA actuators transfer heat with fluid as medium or load current to produce Joule heat to cause shape memory effect, but these two ways have certain defects. Limited by the heat transfer performance of fluids, SMA actuators that transfer heat from the fluid to the medium respond slowly, and the temperature rise of the fluid medium during heat transfer causes the loss of heat energy. Because SMA resistance is small, it needs to load larger current on SMA to generate enough heat to cause shape memory effect, higher performance requirements on power supply, and higher energy consumption, meanwhile, SMA exhibits many alterations in metallographic organization during temperature increase, which leads to the SMA resistance becoming highly non-linear, so it is very difficult to precisely control this type of SMA actuators. To address the deficiencies of the above SMA actuators, a novel helical spring actuator with electrothermal SMA is proposed, which is compact in structure and high energy density and can significantly reduce actuator response time.
Theoretical model
The electrothermal SMA helical spring specimen is shown in Figure 1(a). Polyurethane copper-cored enameled wires are spirally wrapped around the SMA wires to prevent short circuits in electrical appliances. Meanwhile, to generate significant Joule heat and to exchange heat rapidly with SMA wire, the enameled wire and SMA wire are tightly bonded. The upper and lower ends of the electrothermal SMA helical spring are tightened and ground for load-bearing stability, so no enameled wire was wrapped around the SMA wires at the upper and lower ends.

(a) Electrothermal SMA spring sample and (b) schematic of the structure.
The simplified model established from the electrothermal SMA helical spring specimen is shown in Figure 1(b). In the simplified model of electrothermal SMA spring, the diameter of SMA wire is
Working principle
The critical temperatures of SMA in the unstressed state are
Pure shear constitutive model of SMA
The thermodynamic process of shape memory effect of SMA can be accurately described by shape memory factor

Assuming a linear relationship between shape memory factor

Where

The strain of the SMA has three components: elastic strain, shape memory strain as well as thermal expansion strain, which puts the SMA strain

Where

Assuming SMA to be an isotropic material,

the SMA shear modulus

Where
From equation (6), it can be concluded that corresponding to a certain initial state, the three-dimensional fine constitutive equation of SMA under pure shear mode can be expressed as

Thermodynamic model of electrothermal SMA spring
Enameled wire as a heat source to activate the shape memory effect of SMA, with one part of its Joule heat being transmitted to the SMA and the other part to the air around the electrothermal SMA spring, which is thermally exchanged as shown in Figure 2. In order to avoid the heat transfer from the enameled wire into the external environment causing a decrease in electrothermal performance, a polyurethane thermal insulation is placed on the outer ring, and to simplify the complexity of the analytical model, the thermal insulation is assumed to be completely adiabatic. Meanwhile, in order to maintain the structural stability of the electrothermal SMA spring, the inner ring of the spring is set on a cylinder, which is also insulated to avoid heat loss.

Schematic diagram of electrothermal SMA spring thermal exchange.
The process of Joule heat transfer from enameled wire to SMA includes three forms: heat radiation, heat conduction and heat convection. But electrothermal SMA spring during thermal transfer, the ultimate operating temperature of enameled wire is below 150°C and at the same time the austenite finish transition temperature

Where
Considering the effect of latent heat of the phase transformation of SMA, the thermodynamic equilibrium equation of electrothermal SMA spring is 26

Where
The rate of change of the martensitic volume fraction

The temperature of enameled wire increases gradually after current is applied, and the relationship between its resistance

Where ρ is the electrical resistivity of the enameled wire at 0°C,
Thermomechanical properties of electrothermal SMA spring
During electrothermal SMA spring loading, the direction of force follows the axis of the spring, so the SMA wire is always subjected to pure shear load. When

Where
The axial deformation of the SMA spring can be expressed as

The spring geometry equation shown in equation (13) and the SMA pure shear constitutive model shown in equation (8) indicate that the relationship between the torsion angle of the SMA wire and the shear stress in the section is 19
Subsequently, equation (14) is brought into equation (15), and the axial deformation

Where

Where

Where
Combined with equations (15) and (16), it is concluded that the axial displacement

The intermediate variable

Based on equation (19), it can be concluded that the recovery force

The stiffness coefficient

Shear modulus
Numerical simulation of electrothermal SMA spring
Material properties and analysis setup
When the enameled wire is energized to produce Joule heat to raise the SMA temperature to

Electrothermal SMA helical spring boundary conditions: (a) No restraint at the end, (b) Force applied at the end.
The spatial structure of SMA spring is too complex to solve by finite element method (FEM), and the surface heat flux

Where

Where
Electrothermal SMA spring can be used as different types of actuators, but the process by which SMA obtains shape memory characteristics is consistent. Therefore, the driving characteristics of electrothermal SMA spring as different types of actuators can be analyzed by applying different constraints or loads when SMA recovers non-linear strain. For the stability of the SMA spring during loading and unloading, the bottom of the spring is a fixed constraint. Meanwhile, the mechanical properties of SMA are defined by subroutine. The material parameters of SMA (Ni51Ti49 (at. %)) are shown in Table 1.
SMA (Ni51Ti49 (at. %)) material parameters.

FEM analysis results
The stress distribution of an electrothermal SMA spring as a displacement actuator is shown in Figure 4. The spring in the initial state is shown in Figure 4(a). In the loading phase, the spring is compressed, and the stress at the ends of the spring is small, and the stress in the rest of the spring is 66.3 MPa at its maximum value, and the stress distribution is shown in Figure 4(b). In the unloading stage, the spring compression is reduced by a part, and the SMA spring stress is reduced to 0 MPa, and the stress distribution is shown in Figure 4(c). In the heating stage, the spring shape returns to the initial state shown in Figure 4(a), and the stress distribution is as shown in Figure 4(d).

Stress distribution simulation of electrothermal SMA spring displacement actuator: (a) Initial state (T=299K), (b) Loading state (T=299K), (c) Unloading state (T=299K), (d) Loading state (T=373K).
The complete process of SMA generating shape memory effect is composed of Figure 4(a) to (d). In this process, the electrothermal SMA helical spring has a fixed constraint at one end only, and the compressed spring is restored to its initial form by heating, so the process mainly simulates the driving characteristics of the electrothermal SMA coil spring when it as a displacement actuator.
The stress distribution of the electrothermal SMA spring as a pressure actuator is shown in Figure 5. The initial state, loading state, and unloading stage are consistent with the stress distribution of the displacement actuator. In the heating stage, the temperature increases SMA produces shape memory effect, but the two ends of the electrothermal SMA spring are fixed constraint and force constraint respectively, the electrothermal SMA helical spring can only produce a reaction force of 71 N on the constrained surface and the stress increases to 57.5 MPa, as shown in Figure 5(d). The thermomechanical characteristics of the electrothermal SMA spring as a pressure actuator are completely simulated by Figure 5(a) to (d).

Stress distribution simulation of electrothermal SMA spring pressure actuator: (a) Initial state (T=299K), (b) Loading state (T=299K), (c) Unloading state (T=299K), (d) Loading state (T=373K).
The stress-strain curve during the shape memory effect generated by the electrothermal SMA spring displacement actuator simulated by the FEM is shown in Figure 6. The nonlinear stress caused by the external force load (
Shear stress-strain curve of displacement actuator.
The stress-strain curve during the shape memory effect generated by the electrothermal SMA spring pressure actuator simulated by the FEM is shown in Figure 7. The stress-strain curve of the pressure actuator and the displacement actuator during the loading and unloading phases of SMA are the same. However, there is a force constraint at one end of the SMA spring of the pressure actuator, and the residual strain cannot be recovered to recover during the heating phase, so the SMA spring generates a reaction force of 71 N on the constrained surface.

Shear stress-strain curve of pressure actuator.
Experiments and analysis
Experimental setup
Thermal actuation performance test device of electrothermal SMA helical spring as shown in Figure 8, the device can test the driving characteristics when electrothermal SMA spring is a pressure actuator. The main components involved in the test include: digital display force dynamometer (SH-200N), digital display thermometer (TES-1310), manual base, digital display scale (HLB), rotating resistance box, digital DC power supply (RXN-3010D), and digital multimeter (DT-9927).
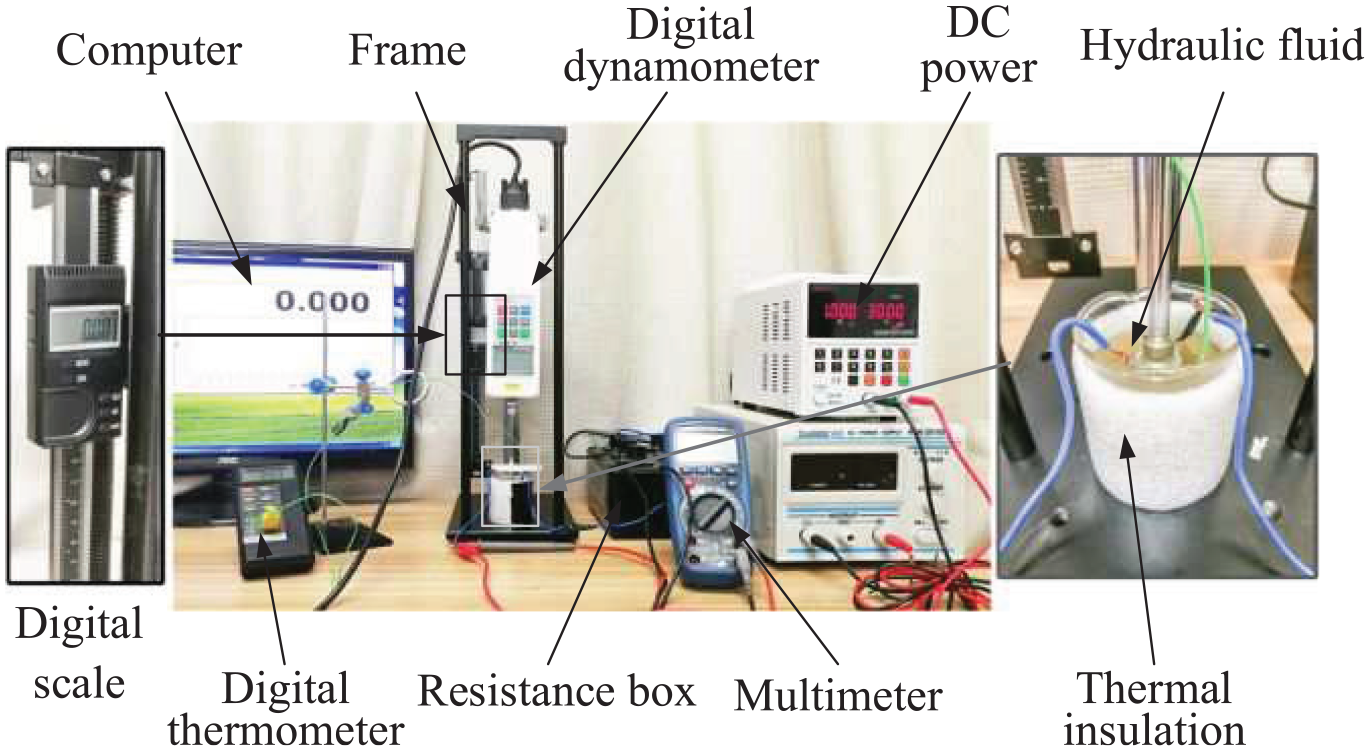
Electrothermal SMA helical spring recovery force testing device.
The beaker sets up a layer of thermal insulation (polyurethane foam) and the top of the beaker is fitted with a removable thermal insulation cover (polyurethane foam). To keep the SMA spring stable when tested, the bottom of the beaker was bonded with a guide bar that could install the SMA spring. Upon powering up heating on an electrothermal SMA spring, which will cause high temperature and large strain on the SMA surface, the thermocouples bonded on the SMA surface ware prone to fall off resulting in inaccurate test data. Therefore, to accurately measure the temperature of SMA, the electrothermal SMA spring was filled with hydraulic oil (specific heat: 1.7 KJ/(kg·°C), heat transfer rate: 0.2W/(m·°C) between the inner wall of the beaker. Compared with the air hydraulic oil has better heat transfer, the hydraulic oil effectively transfers heat from SMA to thermocouple through heat conduction, thus effectively improving the precision of temperature measurement on SMA.
When the electrothermal SMA spring as a pressure actuator, the testing device mainly measured the relationship between the electrothermal SMA spring recovery force
When an electrothermal SMA spring as a force-displacement actuator, the test setup measures the relationship between the electrothermal SMA spring recovery force
The test device for thermal-displacement performance of electrothermal SMA spring is shown in Figure 8, which can test the driving characteristics of electrothermal SMA spring as displacement actuator. The main components involved in the test device include: TES-1310 digital thermometer, SK-199 digital dial indicator, magnetic base, rotary resistance box, DC power supply and DT-9927 digital multimeter. To accurately measure the surface temperature of SMA (similar to the test device shown in Figure 9), the electric SMA spring was submerged in an insulated beaker filled with hydraulic oil. At the same time, to reduce heat loss, a removable thermal cover was installed on the top of the heat insulation beaker, and polyurethane foam was installed between the bottom of the beaker and the metal base to insulate the heat.

Electrothermal SMA helical spring thermal-displacement testing device.
This device mainly measures the relationship between axial spring deformation
Force driving properties
The temperature dependence of the recovery force derived from the electrothermal SMA coil spring thermal drive performance test setup is shown in Figure 10. The force-temperature curve of the electrothermal SMA spring is highly nonlinear at 3A current, and there are two obvious inflection points in the curve, which are closer to

Relationship between the recovery force and temperature.
The experimental results of the finite unit method with the temperature curve and the recovery force when the loading current is 3A are the same. When the temperature of SMA reaches 40°C, the spring recovery force
By estimating the gradient of the electrothermal SMA helical spring force-temperature curve, the SMA recovery rate at 3A current is obtained as shown in Figure 11. As the temperature of the SMA spring increases, there is a large wave peak in the recovery rate curve, and the temperatures at the beginning and end of the wave peak are close to the SMA

Relationship between SMA temperature and response rate.
The surface temperature of the electrically heated SMA spring under a current loading of 3A versus the current loading time is shown in Figure 12. At a loading current of 3A, the Joule heat generated by the enameled wire can bring the SMA to the

Relationship between SMA temperature and current loading time.
The thermodynamic equilibrium equation for the electrothermal SMA spring shown in equation (10) shows that the temperature is linearly related to the time when a constant current is loaded, so the SMA temperature at different currents simulated by the FEM is highly linearly related to the current loading time. Due to the simplification of the ambient heat exchange conditions set by the FEM and the existence of errors in the test environment, the temperature derived from the test is close to a linear relationship with the loading time. At SMA temperatures in the range of 40°C–80°C, the test data are overall smaller than the simulated results, but the simulation results of the FEM are in general agreement with the test data.
Displacement driving characteristics
The relationship between displacement and temperature at 3A current obtained from the electrothermal SMA spring thermal-displacement test device is shown in Figure 13. When current

Displacement-temperature curve of electrothermal SMA spring.
Due to the measurement errors in the experiments and the simplification of the theoretical model, the theoretical values of the displacement-temperature curves shown in Figure 13 are greater than the experimental values in the range of 25°C–55°C, and the theoretical values of the displacement-temperature curves are less than the experimental values in the range of55°C–100°C. However, the axial displacement-temperature curves of the electrothermal SMA coil spring from the finite unit method simulation are consistent with the experimental values.
By estimating the gradient of the displacement versus temperature curve, the displacement recovery rate of the electrothermal SMA spring is obtained as shown in Figure 14. When the SMA temperature does not reach

Relationship between SMA temperature and displacement recovery rate.
Force-displacement driving characteristics
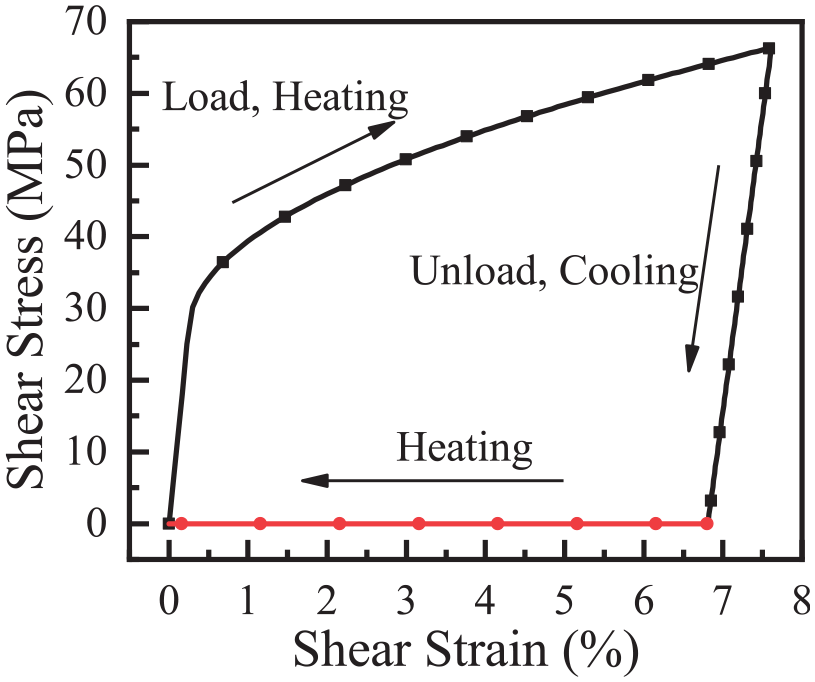
When the electrothermal SMA spring is used in smart actuators, it is necessary not only to output pressure as a force actuator or displacement as a displacement actuator, but also to output displacement followed by a recovery force in specific application scenarios. The force-displacement response curve of an electrothermal SMA spring at 100°C, as obtained by the force-displacement test device, is shown in Figure 15.
Force-displacement response curve of electrothermal SMA spring actuator.
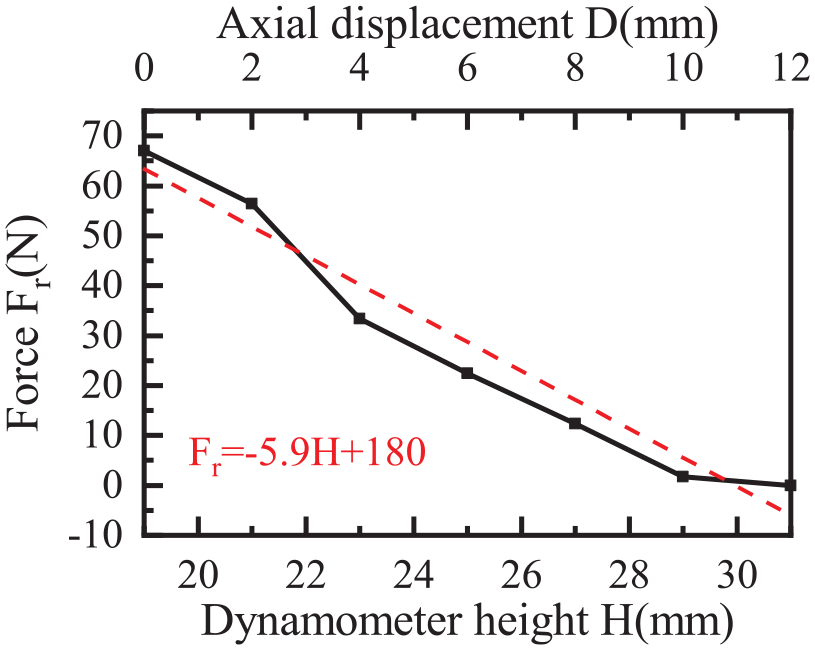
As shown in Figure 15, the height
From equation (20), it can be seen that when the SMA temperature is constant, the return force

Force-displacement response curves of electrothermal SMA springs at different temperatures.
Conclusions
In this paper, a new type of electrothermal SMA helical spring actuator is proposed, which generates Joule thermal excitation SMA by enameled wire to generate shape memory effect, continuously and stably controls the phase transformation process of SMA by controlling current. The actuator has a compact structure, high energy density, and fast response. The thermomechanical characteristics of electrothermal SMA spring actuator were derived by theoretical and FEM analysis. The numerical simulation of the electrothermal SMA coil spring actuator was realized by the FEM, and the thermo-mechanical characteristics of the electrothermal SMA coil spring actuator obtained by the FEM are consistent with the experimental results.
The results show that the electrothermal SMA coil spring produces a nonlinear response force or nonlinear displacement with increasing temperature when used as an actuator. The proposed theoretical model can be used for the design and experimental analysis of electrothermal SMA helical spring actuators. The experimental temperature-force response and temperature-displacement response, as well as the force-displacement response at different temperatures, provide references for the design and fabrication of electrothermal shape memory alloy coil spring actuators.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to gratefully acknowledge the National Natural Science Foundation of China (NO. 51875068, NO. 51905060).