
Abstract
The motion simulation analysis of the control rod drive mechanism is a typical multi-disciplinary cross-coupling problem covering electromagnetic field, flow field, and dynamic field. Ensuring effective simulation accuracy is an important advance for accurately predicting the reliability of nuclear reactors. In this paper, a multi-disciplinary co-simulation method is proposed based on time unit differentiation, which solves the coupling problem of parameters by micro-element thought. It can avoid affecting the accuracy of simulation results due to the inequality of multi-disciplinary parameters in the co-simulation process. This paper takes the nuclear reactor control rod drive mechanism as the verification object. The multi-disciplinary co-simulation platform in Isight is built based on the co-simulation method. By differentiating the overall process of multidisciplinary co-simulation according to time unit and using the same simulation time interval for each discipline, the Newmark method is used to determine the minimum simulation time integration step of each discipline. The multi-field co-simulation is carried out including electromagnetic field, flow field, gravitational field, and motion field of the driving mechanism in the working process. Through comparison with the actual measurement results, the simulation results have an error within 5%, which is better than existing motion simulation results of driving mechanism.
Keywords
Introduction
With the increase of the scale of modern engineering system, the system covers more disciplines, the coupling relationship between different disciplines become more complex, and the demand of multi-disciplinary associated simulation and multi-objective optimization become more prominent. 1 Since the 21st century, with the exploitation of non-renewable energy becoming less, nuclear energy as a new type of energy has received extensive attention from community. 2 Due to the characteristics of strong radiation and high energy density of nuclear energy, it is an important research topic to use and control nuclear energy reasonably. 3 The stepping magnetic lifting control rod drive mechanism is a key component of the third-generation nuclear reactor. It is energized by the coil according to given timing. The coil sequentially controls the lifting armature, moving armature, holding armature to complete the stepping lifting, and inserting actions of the control rod to control working status of nuclear reactor. 4 The motion process of the driving mechanism is a typical multi-field coupling complex system such as electromagnetic field, flow field, and temperature field in the liquid environment of high temperature and high pressure. The motion displacement and velocity of driving mechanism change with the dynamic variation of electromagnetic force, friction force, and liquid resistance, and its motion process is a complex multi-field coupling problem. How to ensure the simulation accuracy of the driving mechanism plays an important role in accurately predicting the reliability and life of the reactor. 5
Solving the motion process of driving mechanism is a transient dynamic analysis problem. For this kind of problem, the Newmark method in stepwise integration method is representative in numerical method. Taherifar et al. 6 and Gorini and Callisto 7 applied this method to architecture to explore how to enhance the bearing capacity of building materials and the key factors that affect the dissipation performance of equipment. Zhuogen and Pu 8 combined the Newmark method with modal damping or approximate modal damping, and established the iterative solution process of implicit method, which can be used to calculate the dynamic response of structures with strong modal characteristics. Lu et al. 9 employed the Newmark method to resolve differential equations and obtain the additional acceleration, then used it to perform dynamic reliability analysis of a filtering reducer. In addition, Newmark method is also widely used in geology and vibration.10,11
The driving mechanism of nuclear reactor control rod is affected by coupling electromagnetic force and water resistance in the process of motion. At present, most of the studies are completed under a single action. For example, in the field of electromagnetic field simulation, the researchers obtained the electromagnetic characteristics of the driving mechanism and other systems in the process of transient action under different working conditions.12–19 In the aspect of flow field, Xie et al. 20 and Xiaochen et al. 21 carried out grid division and flow field analysis of cooling channel. Jintao et al. 22 proposed a coupling simulation method of reactor control rod falling rod behavior based on dynamic grid, and achieved a good compromise between calculation time and solution accuracy. Some scholars have studied the motion of the driving mechanism, solved the internal calculation program of the falling rod dynamics problem, and developed a three-dimensional virtual motion system.23–25
Based on the above methods and results of single-disciplinary analysis, the multi-disciplinary associated simulation is used to restore the real motion of the driving mechanism, and the coupling relationship between the parameters of each subject is solved. Liu et al. 26 and Yantao and Hongbiao 27 calculated the dynamic equation of step motion by numerical method, and establish dynamic calculation model to verify it with the help of finite element analysis tool. Luo et al. 28 proposed a new method of co-simulation of parallel robot based on multi-platform to improve the accuracy of the dynamic response analysis of the part. Qiang et al. 29 built a dynamic analysis system through Matlab/Simulink coupling to establish an interface, and obtain the relationship between the key motion parameters and time. Wei et al.30,31 calculated the electromagnetic field and flow field iteratively, and introduced the convergent results into the sports field to calculate. In addition to the dynamic characteristic curve, the step jump load was quantitatively analyzed for the calculation of strength and fatigue life.
At present, when carrying out multi-disciplinary associated simulation, one subject simulation model is generally selected as the center, and the design parameters of other disciplines are called through the simulation interface to complete the multi-disciplinary simulation task. Although this associated simulation method can realize the process of parameter transfer between disciplines and improve the simulation efficiency to a certain extent, there are the following two outstanding problems: one is the unequal status of design parameters in each subject, which leads to the emphasis on the design parameters of a certain discipline. In the process of multi-disciplinary associated simulation, there is no difference in status between different disciplines and different types of parameters in essence. The simulation process centered on the design parameters of a certain discipline can easily lead to the consistency constraint when solving the coupling relationship between the design parameters of a discipline or a few disciplines. The results of multi-disciplinary associated decoupling under this constraint are often different from those obtained in engineering practice. On the other hand, the number of design parameters is inconsistent. There is coupling relationship between design parameters of different disciplines in the process of associated simulation, especially that the same design parameters need to be calculated with different dimensions in different disciplines. So it is difficult to realize the real-time unification of parameters in the simulation process, which takes the simulation results of one discipline as a whole and introduces them into other disciplines as a whole. The reliability of the simulation results will be affected.
In order to solve the above two problems, in this paper, a multidisciplinary co-simulation method is proposed based on time unit differentiation. It uses Newmark method to determine the integral step size of simulation time and bring the simulation process of each subject into the unified simulation process. The method is applied to the simulation process of control rod drive mechanism, and a multi-disciplinary associated simulation platform system is constructed. Through comparison with the actual measurement results, the simulation results have an error within 5%, which is better than the existing motion simulation results of driving mechanism.
Multi-disciplinary associated simulation method of mechanism motion based on Newmark method
According to interdisciplinary issues, the multidisciplinary co-simulation process which is based on analysis of various disciplines and their coupling constructs mapping relationships and simulation platform for model interconnection and data exchange. So it can simulate the real situation to the greatest extent and draw corresponding conclusions. For the problem that the parameter status is not equal and the dimension is not consistent in the process of multi-disciplinary associated simulation, the fundamental reason is that the coupling of parameters between disciplines is strong. In the traditional multi-disciplinary simulation method, the simulation process between disciplines is relatively independent, so it is impossible to simulate the motion of the system covering multiple disciplines. In order to improve the accuracy of multi-disciplinary associated simulation, it is necessary to ensure that the parameters of each subject can transfer and interact in real time in the simulation process. It is an effective way to solve this problem by using microelement method to differential the simulation time unit.
Multi-disciplinary associated simulation method of mechanism motion based on microelement thought
The multi-disciplinary associated simulation method based on microelement idea is shown in Figure 1. In the first, Tasks of the simulation problem need be distincted. The mapping relationship between the subject model and the parameters of each subject involved in the associated simulation need be determined. Then the independent simulation models and the data interaction interface module between these models is developed according to the need of different disciplines. Each subject simulation model is called to calculate the associated simulation system in the micro-element unit in turn. Data transfer is carried out according to the parameter mapping relationship between each subject. The simulation result of each micro-element time period is used as part of the final result and the input part of other micro-element time periods.

Multi-disciplinary associated simulation process.
Through the micro-element thought in this multi-disciplinary associated simulation method, the relationship of the complex coupling variables is solved by time unit and parameters transfer. The consistency constraint of discipline simulation center or multi-disciplinary decoupling cannot be set, which can effectively avoid the unequal status of multi-disciplinary simulation design parameters. Because this method can realize the continuous process automatically, the efficiency of the simulation process is improved. And the continuous input of parameters can be realized in multi-disciplinary co-simulation platform, which creates the favorable conditions for the optimization.
The method based on time unit differentiation can adapt to various complex motion processes. The simulation method transforms the complex multi-discipline and multi-parameter coupling problem into a simple motion problem in micro-element time period. The time step is adjusted to ensure that the assumption of the motion simplification is true, thereby improving the simulation accuracy of the entire complex multi-disciplinary co-simulation result. Therefore, this method has strong adaptability for solving this kind of problem.
Multi-disciplinary associated simulation model of mechanism motion based on Newmark method
The motion process of control rod driving mechanism is a complex multi-disciplinary problem. Under the action of electromagnetic force, spring force and fluid resistance, it is necessary to solve the relationship between electromagnetic force and time and the variation law of displacement, velocity, and acceleration of driving mechanism. In order to explore this law, it is necessary to calculate the motion response of the driving mechanism under the action of external force at each time. It is difficult to find the general solution of the combination of motion equations in various disciplines because of the complexity of the coupling relationship between the external forces. The motion process can be subdivided according to time by the idea of micro-element to be simplified. According to the Kinematic equation:

In equation (1), [M], [C], and [K] are the mass matrix, damping matrix, and stiffness matrix of the moving mechanism,
The Newmark method in the stepwise integration method makes use of the microelement idea to carry out Taylor expansion and approximate calculation of equation (1). It uses the recurrence method to concatenate each microelement section to obtain the numerical solution of the whole dynamic equation. In this paper, the motion response of the next stage of the system is deduced by the way of time integral step based on Newmark method. It is assumed that the relevant parameters at




Where:
The above equation shows that after the inherent parameters of the system [M], [C], [K], the variation of the external load with time
Determination and accuracy analysis of microelement time step
The selection of
Condition 1. Assuming that the total time length of the simulation process under the engineering problem is T, the value is calculated by dichotometry, and the approximate range is determined

In equation (6),
Step1: Input:
Step2: Calculate the simulation results when
Step3: Calculate the correlation index

Step4: Calculate
Step5: When
When
Step6: Input
Step7: Calculate the simulation results when
Step8: Calculate
Step9: Calculate
Step10: When
Step11: Repeat until
Condition 2: Assuming that the approximate range of Δt is
Step1: Input:
Step2: Calculate the simulation results when
Step3: Take 10 points on each curve and ensure that their abscissas correspond to the same, set point
Step4: Set
Step5: Calculate standard deviation
Step6: Calculate
Step7: When
When
Before the simulation of the engineering problem, the value range of Δt can also be roughly determined by consulting relevant documents to reducing the amount of calculation, instead of condition 1 for the initial range determination process.
Multi-disciplinary associated simulation method of control rod drive mechanism based on Newmark
A numerical method for solving the motion of fuel bar driving mechanism based on Newmark method
The control rod drive mechanism of reactor is affected by electromagnetic force, water resistance, spring force in the process of motion. The external load changes constantly with the movement process of the driving mechanism, and there is a coupling relationship between them. In order to simulate and analyze this kind of complex motion process under the chance of these load, the motion process of driving mechanism is subdivided according to time based on Newmark method. The multi-disciplinary simulation and parameter transfer are carried out in the micro-element unit after microelement. The motion parameters of the driving mechanism are obtained by recurrence of the simulation results after microelement.
The motion of the armature part of the driving mechanism is analyzed according to the actual size and material parameters. The mass matrix [M], stiffness matrix [C], and damping matrix [K] are the inherent properties of the system, which do not change with the motion of the object, and can be derived by finite element analysis software. Electromagnetic force, fluid resistance, and spring force change in the process of motion, and the calculation equation takes the lifting process as an example4,34,35:
Electromagnetic force:

resistance:

Spring force:

Where:
External load:

In order to study the variation process of displacement, velocity, and acceleration of armature in the process of driving mechanism motion, the average acceleration method, a special form of Newmark method, when
Bring equations (7)–(10) back to equation (2):




Bring equation (12) back to equations (3), (4), (11):




Multi-disciplinary associated simulation process of control rod driving mechanism
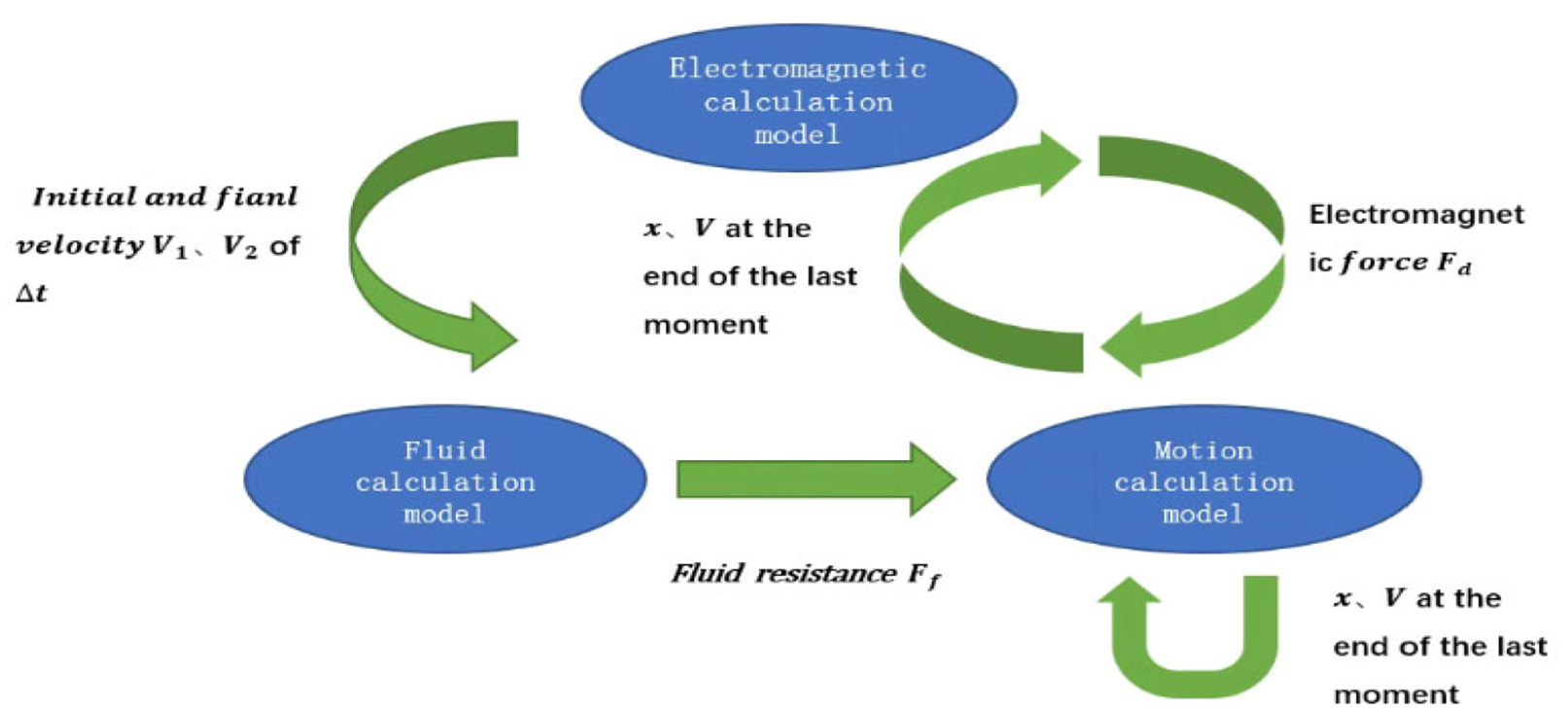
Based on the Newmark method, the numerical calculation of the multi-disciplinary associated motion of the control rod driving mechanism is solved. The equations (7)–(9) shows that the external load of the driving mechanism has a nonlinear relationship with the motion parameters in the process of its motion. The whole process of armature from initial motion to adsorption and impact is differential. The time step is
The magnitude of electromagnetic force varies with the change of armature position and the current value loaded on coil by external circuit. For the electromagnetic field model of driving mechanism, the input is the coil current value (loaded according to the actual requirements) and the displacement of armature at t time (assuming the initial position of armature is 0). The electromagnetic force generated by the electrified coil of the armature moves upward for a distance, which is
It is assumed that the acceleration of reactor coolant flow is constant, and the variable factors that determine the fluid resistance of armature are the velocity of upward motion and the velocity of coolant. The velocity of coolant can be predefined in the flow field model. Thus the input of the flow field analysis model is the initial velocity
In the dynamic field model, it is necessary to carry out the movement simulation of the armature integrated the electromagnetic force, fluid resistance, spring force (all average) and gravity, velocity, and acceleration of the armature calculated at the end of t time calculated by other disciplines. The armature motion parameters
Multi-disciplinary associated simulation design parameter transfer process of control rod driving mechanism.
The simulation process of the driving mechanism mainly includes:
The initial point of armature motion is set to the zero point of position coordinate, the direction of motion is positive, and the initial velocity is
According to the parameter mapping relationship, the multi-disciplinary simulation process is built. The parameters obtained from the motion process simulation at each
In essence, Newmark method is a kind of recurrence process, which needs to be deduced by the idea of cycle in motion simulation of driving mechanism based on Newmark method. The most critical step in the construction of the cycle is the simulation analysis data
The number of cycles:
In the concrete realization of the loop, the traditional multi-disciplinary simulation process generally adopts the way of manual introduction, which carries on the parameter transfer and the model setting among the disciplines. Because the value of
Multi-disciplinary associated simulation platform for control rod drive mechanism
Based on the proposed multi-disciplinary associated simulation method of control rod drive mechanism, this paper constructs a multi-disciplinary associated simulation platform of control rod drive mechanism based on Isight. Isight is a tool platform which can integrate multiple simulation software. It can call the integrated simulation software sequentially through the established simulation flow, and realize the mapping and interaction of simulation data by developing the interface program between the simulation model and the platform. The key to build the platform is to build the simulation model interface and data interaction mode. Because
Construction of platform simulation model interface module
In this paper, Maxwell, Fluent, and Adams are selected for the simulation and analysis tools of electromagnetic field, flow field, and dynamic field of control rod driving mechanism. Because the simulation software of different disciplines is relatively independent, secondary development is needed when constructing the model interface traditionally between multiple simulation models. Isight tool integrates each software through the unified platform, which effectively reduces the difficulty and universality of the interface construction. According to the Newmark method, the simulation process is divided into several time periods, and the interface content changes with the calculation model in each simulation. Only by finding the location of the required data in each simulation, the results of each model analysis can be accurately and timely imported into the platform, and the data transmission can be carried out according to the preset ways. The aim is to ensure the correctness and timeliness of the interface between the model and the platform. Taking electromagnetic field (Maxwell) as an example, the construction process of simulation model interface module is shown in Figure 3. Isight integration component simcode module includes input data exchange, execution of external application program, and output data exchange. The two data exchange parts are the interface between the simulation model file and the Isight platform. The input file and output file of electromagnetic field simulation model are exported to simcode. Transmission process of input and output parameters can be completed by writing and reading the corresponding position data.

Construction of interface module for simulation model.
The interface file for the electromagnetic field model is as follows:
The data of the corresponding position in the electromagnetic field can be set as input or output variables, such as the initial position (“InitPos:=”,), the initial velocity (“Velocity:=”), the output electromagnetic force (“Force=”), etc. The interface between the analysis model and the integrated platform can be completed. In order to realize the automatic simulation process, the integrated platform must be able to automatically call the corresponding analysis software for simulation. The call command must be saved in file format of bat.
When the microelement idea is used to build the associated simulation platform of the driving mechanism, it is necessary to call the analysis software repeatedly to analyze and output the results according to the given simulation steps under different input conditions in order to realize the recurrence process. The solution to this problem is to input the simulation process into simcode as a script. Only the value of the input parameters is changed in the script at each simulation, and the rest of the simulation process is repeated. Some contents of the simulation script of electromagnetic field, flow field, and dynamic field are shown as follows:
After the input and output file templates in simcode are setting and the corresponding program call commands and scripts are writing, the process of building the interface between the model and the simulation platform is realized, and the data interaction setting is entered.
Platform data interaction module construction
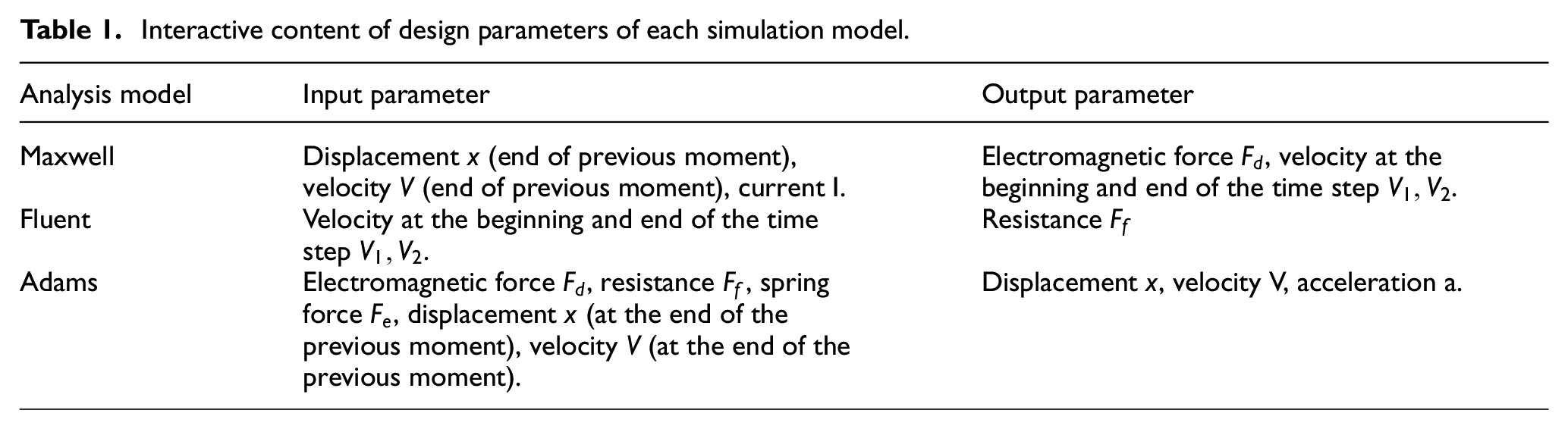
When constructing a multi-disciplinary simulation platform, data must be interacted and transmitted between analysis models of various disciplines according to a certain logical relationship. The data interaction method in Isight is to define the input and output parameters of each model on the premise that the model interface is created. Then establish the corresponding mapping relationship through the connection method in the mappings interface. According to the time dimension assumption made according to the Newmark method, the input and output parameters of each model in each time of
Interactive content of design parameters of each simulation model.
Based on the driving mechanism motion multi-disciplinary associated simulation time microelement, associated simulation process between various disciplines are completed through the construction of a loop. The criteria for the number of cycles and the termination of cycles are defined in the “LOOP” component as 38 times (

Associated Motion Simulation workflow based on Isight.
Analysis of associated simulation process and results of driving mechanism
Determination of associated simulation step size of driving mechanism
After the simulation platform is built, a reasonable value of




Points and mean calculation when

The calculated results:
Simulation process and result analysis of various disciplines when
Electromagnetic
The electromagnetic working principle of the control rod drive mechanism is that the electromagnetic field is generated by the working coil installed on the outside of the claw shell. The electromagnetic field passes through the claw shell, control the magnetic pole and armature to drive the claw action, and finally make the drive rod and control rod which is connected with it move. The input parameters of electromagnetic field include external coil current, initial displacement and initial velocity. The electromagnetic model in Maxwell is shown in Figure 9. The coil current is controlled by an external circuit to control the nuclear reactor components to complete the specified action. The output

Two-dimensional diagram of electromagnetic field analysis model.

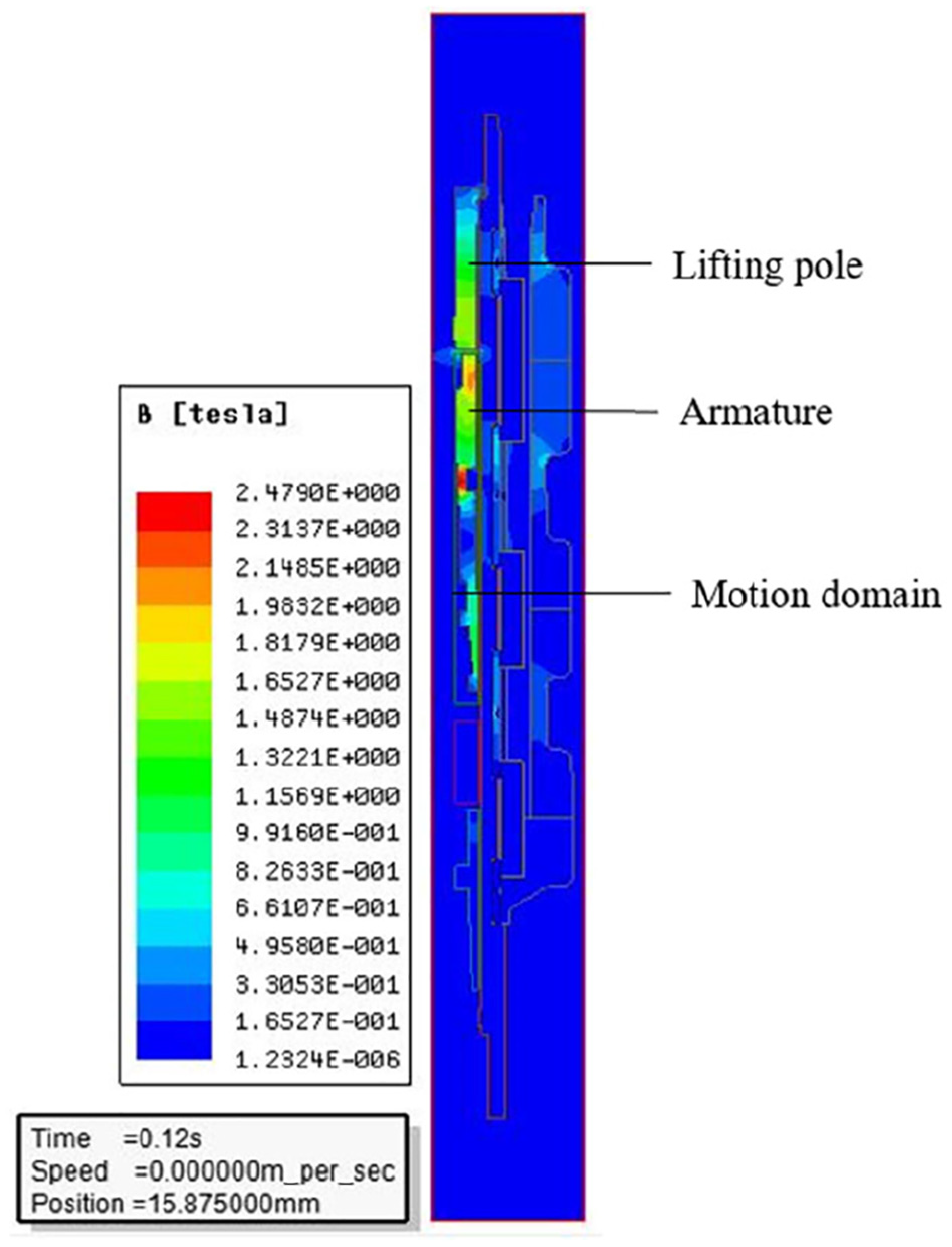
Intensity distribution cloud chart of magnetic induction.
Flow field
The control rod driving mechanism is distributed inside the top cover of the reactor pressure vessel, and its surroundings are filled with high-temperature water heated after flowing through the fuel rods. When the drive mechanism moves the control rod, it is subject to fluid resistance. These fluid resistances include the end pressure resistance, the shape resistance, the viscous resistance, etc. The end pressure resistance has a greater impact on the movement process of the drive mechanism. The dynamic mesh technique is used to analyze and calculate fluid resistance. The average value of the initial and final velocities

Three-dimensional model diagram of flow field analysis.

When the armature moves, it is accelerated by the electromagnetic lifting force generated by the lifting magnetic pole, and the fluid resistance during the movement reduces the acceleration increase. With the increase of speed, the resistance of the fluid continues to increase. It is noted that the final velocity
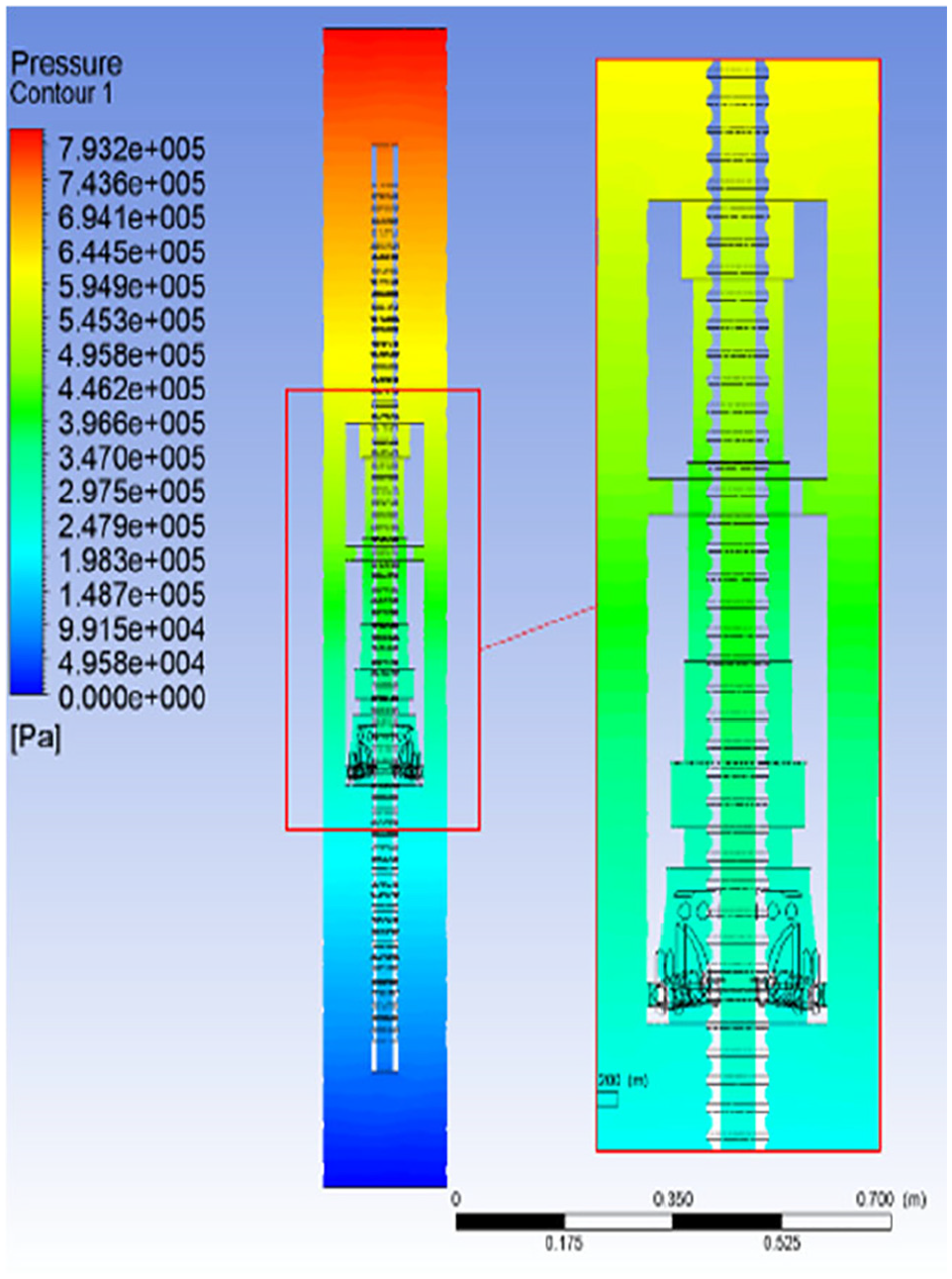
Pressure distribution map of fluid domain.
Motion simulation
During the upward movement of the moving armature, the power is the electromagnetic force generated by the moving coil, and the resistance includes its own gravity, spring force, and fluid resistance. In the initial stage of upward movement, the electromagnetic lifting force of the moving armature is not enough to overcome the resistance, and the moving armature remains stationary. As the value of current increase and reach stability, the electromagnetic lifting force exceeds the resistance, and the armature starts to move upward. As the moving armature moves up, the electromagnetic lifting force is further increased. It causes the speed and acceleration to rise continuously, and the fluid resistance it receives also increases. When it moves to the top, the armature collides with the magnetic pole and attracts.
When establishing the analysis model in Adams as Figure 15, it is necessary to set the stiffness coefficient and initial length of the spring. The displacement

Three-dimensional model diagram of motion field analysis.
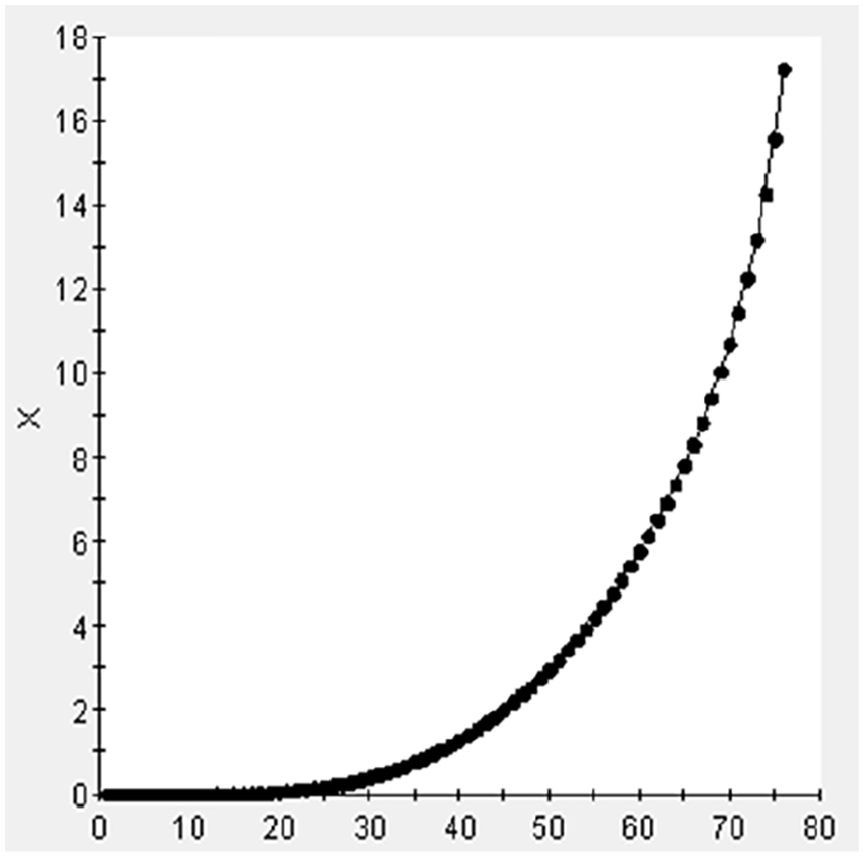
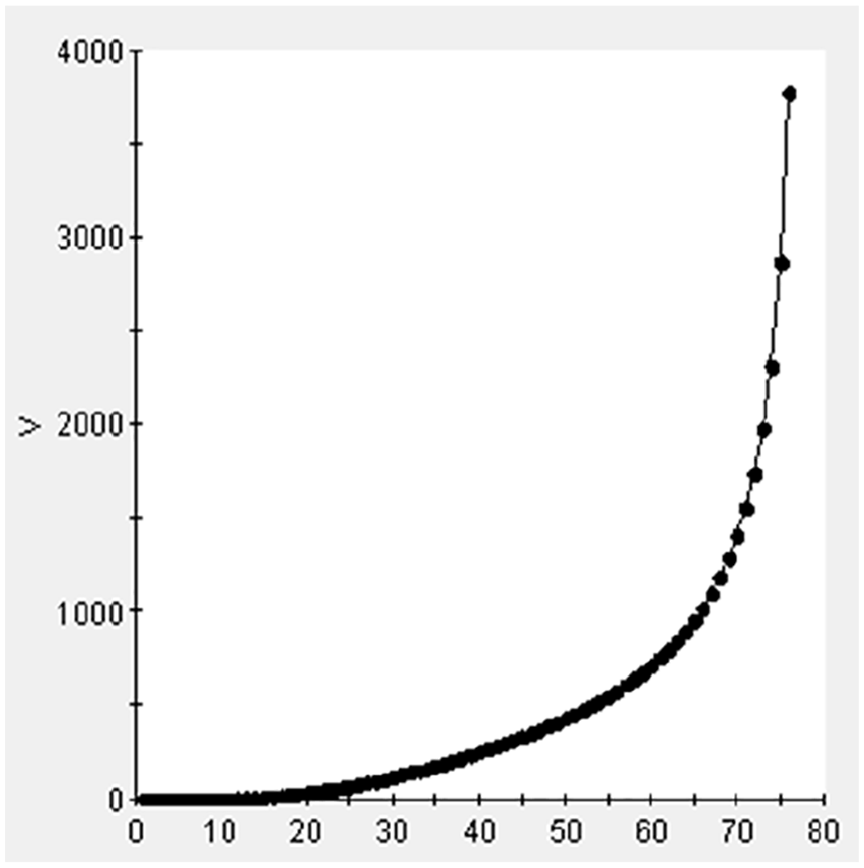

It can be seen from the diagram that with the increase of the displacement of the driving mechanism, the distance between the armature and the magnetic pole of the driving mechanism is gradually shortened, and velocity and acceleration are increased. In 0–30 ms, the velocity of motion rises slowly. From 30 ms, the acceleration increases gradually until the armature collides with the magnetic pole. The velocity of collision is about 3800 mm/s, and the acceleration is about
Conclusion
In this paper, a multi-disciplinary associated simulation method which uses time unit differentiation is proposed based on microelement idea and Newmark method, in order to solve the problem that the multi-disciplinary parameters are not equal and dimensional inconsistency caused by the traditional multi-disciplinary simulation. It makes parameters be transferred between various disciplines in each micro-element unit to solve the complex coupling relationship. The determination steps and principles of time integral step size are established from the point of view of improving the simulation accuracy.
With this method as a theoretical guide, Isight software is used as a tool to illustrate the process of building a multi-disciplinary co-simulation platform for the target in the paper. The process includes unifying the simulation time of each process, building simulation models and platform interfaces of various disciplines, and establishing the mapping between parameters according to the coupling relationship. As a whole, the recursive process is deduced in a cyclic manner to realize the joint simulation process of complex multidisciplinary problems.
The control rod drive mechanism is taken as the analysis object. A multidisciplinary joint simulation model is established through the Isight platform including electromagnetic field, flow field, and sports field. Under the given accuracy requirement, the time step t = 0.5 ms is determined. The motion parameter curve of the driving mechanism under certain working conditions is obtained. The error between the result and the measured value is small, which confirms the feasibility and efficiency of this method in solving such problems.
When using the multi-disciplinary co-simulation method proposed in this paper to solve the motion problem of the driving mechanism, the change of input parameters and the differential time unit will have an uncertain impact on the calculation result. The paper has carried out an analysis of the impact that the change of each micro-element time unit. The uncertainty analysis of the calculation results of other parameters will be described in detail in the subsequent work.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (No. 52075350); the Sichuan Major Science and Technology Project (No.2019ZDZX0001).
Availability of data and materials
Data and materials are real and transparent in the paper. The work described was original research that has not been published previously, and not under consideration for publication elsewhere, in whole or in part.