This paper presents the weak formulation of a quasi-static evolution model for two deformable bodies with uni-directional adhesive unilateral contact on which external loads act. Small deformations and linearized elastoplasticity with hardening are assumed. The adhesion component is rate-dependent or rate-independent according to the choice of the viscosity coefficient of the glue; elastoplasticity is considered rate-independent. The weak formulation is expressed as a doubly non-linear problem with unbounded multivalued operators, as a function of internal and boundary displacements, plastic and symmetric strain tensors, and the bonding field and its gradient. This paper differs from other formulations by coupling the equations defined inside and on the boundary of the solids in functional form. In addition to this novelty, we verify the existence of solutions by a path other than that displayed in similar articles. The existence of solutions is demonstrated after considering a succession of doubly non-linear problems with an unbounded operator, and verifying that the solution of one of the problems is also a solution to the objective problem. The proof is supported by previous results from non-linear Partial differential equations theory with monotone operators.
Quasi-static problems of adhesive contact with elastoplasticity have focused on energetic solutions, for example, the case of contact and elastoplasticity with hardening,1 delamination problems,2,3 the rate-independent model with damage,4 adhesive contact with temperature,5 the numerical approach developed in Panagiotopoulos et al.,6 among others. A novelty of this document consists of the weak formulation from standard models of elastoplasticity and adhesion (which considers interactions between the bonding field and the displacement on the border), together with the proof of the existence of weak solutions (without going into the field of the energetic solutions). We also obtained an abstract representation of the set of equations in a single differential inclusion with unbounded multivalued operators. The problem is described below.
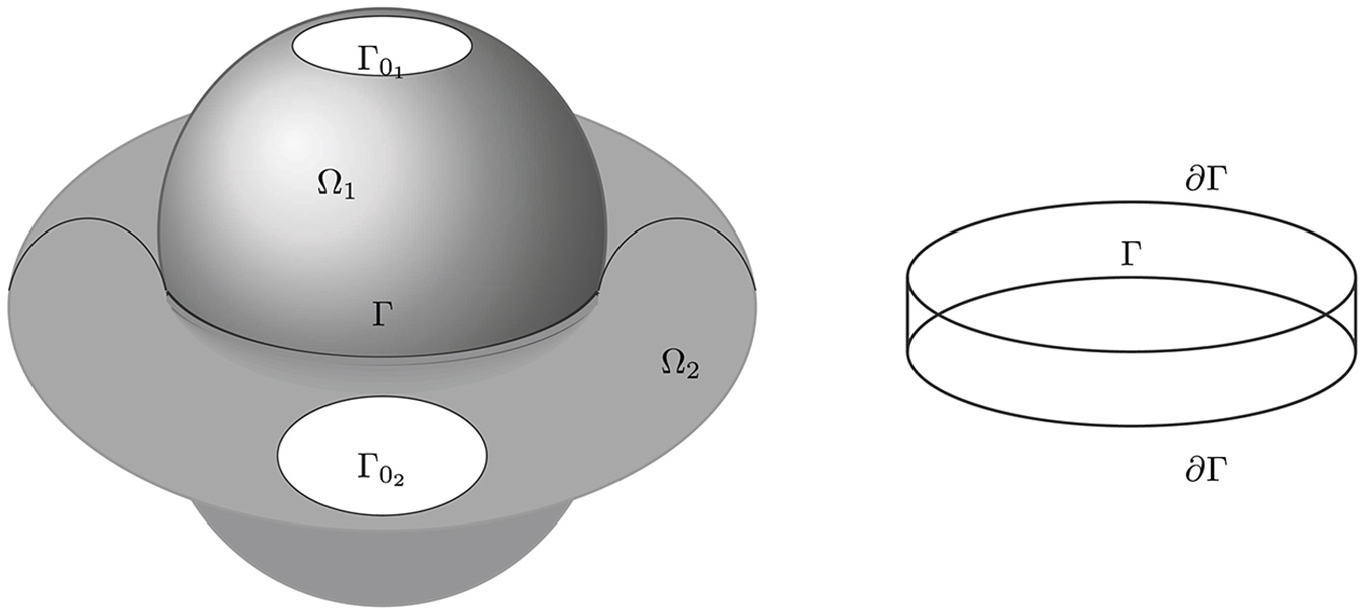
Two deformable solids occupying reference domains Ω1, Ω2 are considered in adhesive contact in a common region Γ = ∂Ω1∩∂Ω2 (see Figure 1). Both solids with a boundary ∩∂Ωi\Γ, with prescribed displacement ). For each material, we consider a dissipation potential and a stored energy density , where is a Hilbert space for ( is the linearized symmetric strain tensor and is the plastic tensor). The elastoplastic component is defined by a momentum equation and a plastic flow rule as a function of and . The treatment in this paper does not include damage and temperature. We consider a unidirectional (irreversible) and unilateral (no penetration between solids) adhesive contact through differential Fremond inclusions on the contact boundary.7 The bonding field , the displacements on the boundary and indicator functions define these differential inclusions. There is extensive literature on adhesive contact problems in Refs.8–10 among other works.
Ω1 adhered to Ω2 in Γ, with prescribed displacement in A figure made with Latex Tikz package.
Doubly non-linear problems have been mainly addressed by Refs.11–14 The weak model will have the abstract representation where and are unbounded multivalued monotone operators. The proof of the existence of weak solutions cannot be direct since the operators and are not bounded. For this reason, we will construct a sequence of doubly non-linear problems that present solutions, and we will prove that one of them also solves the original problem. The contributions to be considered in this work are: the strong monotony proof of (Theorem 11), the proof of the existence of solutions (Theorem 14), and the weak formulation based on its extended variables and the loads applied to the interior and exterior of solids (Theorem 6).
The document has been organized as follows: Section 2 describes the classical formulation of elastoplastic models and differential inclusions for adhesion. It also defines the monotone operators, the doubly nonlinear problems, and presents a theorem of existence and uniqueness of solutions. Section 3 defines the weak formulation of the problem, as well as the solution spaces. Finally, Section 4 demonstrates the existence of solutions of the weak model. The reader who is not very interested in the mathematical foundations of the model can omit the Sections 2.3 and 4 of this document.
Model equations
This section summarizes the basic concepts of elastoplasticity and adhesion and displays the constitutive equations of the model. The elastoplastic model with hardening that we present follows the variational formulation proposed by Stefanelli15; the notations and other considerations of the elastoplastic model as a rate-independent system are taken from Liero and Mielke.16
Linearized elastoplasticity as a rate-independent system
Rate-independent systems (RIS17) arise in various phenomena such as elastoplasticity, delamination damage, fracture propagation, ferroelectricity, among others. In a RIS problem, any monotonous reparameterization of the time variable in the solution of the problem solves the original problem with the respective reparameterization. Therefore, it does not display an intrinsic time scale.
Consider two domains () with boundary of class , and where is the part of the boundary with the Dirichlet condition
and let . It is also assumed that , so the pair satisfies the Korn’s inequality for some and all .18 Here, is the symmetric tensor of linearized strain.
The elastoplastic properties of each body are prescribed by the stored energy density and the potential of dissipation where:
,
is continuous and coercive,
is continuous, convex and 1-homogeneous (i.e. for all which guarantees that the material response is rate-independent).
The solution of a rate-independent linearized elastoplastic problem has to solve the momentum equation
and a differential inclusion called plastic flow rule
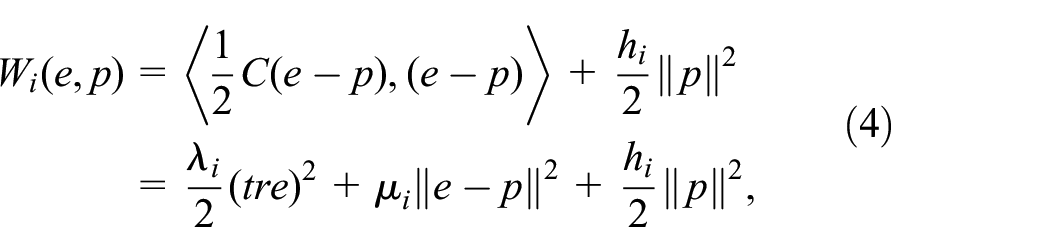
where is the subdifferential of in and it is a density of force per unit volume. Particularly we consider stored energy density to the quadratic functional (in the isotropic and homogeneous case)
where , are the coefficients of Lamé and a measure for the kinematic hardening. In this particular case, the stress tensor is determined by the derivative of the energy functional concerning the deformation tensor: . On the other hand, dissipation potential is considered as
where is the yield stress. According to (4), we have to and On the system (2)–(3), we will assign the boundary conditions
where denotes the normal external vector to is a force density per unit area and
Adhesion
A contact problem with small deformations is a system of constitutive equations or abstract equations, which models the deformation of two or more bodies under load. They can include effects such as damage, adhesion, memory, friction, temperature, and other dissipative responses. The classic adhesive contact models such as the one discussed in this paper are idealized cases that assume cohesive zones independent of time, and that generally introduce inconsistencies in the model (see Heitbreder et al.19 for a more in-depth discussion); However, this analysis is outside the theoretical scope of this paper as is the thermodynamics associated with the boundary,20 and instead we will consider the standard approach of Fremond7 on adhesive contact.
Suppose that and are glued in a common region of contact , it is assumed that is of class and that it also satisfies the Korn inequality. In addition to the variable introduced in Section 2.1, the variable models the evolution of the surface fraction with active glue fibers, which break or mend by microscopic motions (solid glue is assumed and for such irreversibility of the break). When there are no active glue bonds, when all bonds are active, when , there is a proportion of active glue bonds.
Because of the conditions imposed on the border of solids, trace theorem extends the displacement field with to each of the points , in particular, can be extended over It will be denoted by the gap on the contact surface , where is the small displacement of the solids on at the macroscopic level. For the sake of simplicity, it neglects the thermal phenomena and excludes the temperature as a state quantity. Also, no work involving microscopic motions is provided to the system, that is, there are no chemical, radiative, optical, or electrical actions. The differential inclusions used by Fremond for the adhesion problem are
where:
the parameter measures the intensity of microscopic interactions,
is an elastic constant of the adhesive material,
is the viscosity coefficient of the glue,
is the indicator function,
is an impenetrability constraint of both solids (unilateral contact),
characterizes the irreversible behavior of solid glues (uni-directional contact),
is the energy of Dupré which consists of the work required to separate two adhered bodies.
In case of considering reversible adhesion, the relation is removed from the equation. The boundary and initial conditions for are
where denoting the normal vector exterior to
Doubly nonlinear problems
Several authors have studied doubly non-linear problems, including,11,12,21 and the references in them. The differential inclusion related to this model has the representation
The approach to be used corresponds to the developments made by Colli,12 where and are monotonous operators. The theorem that guarantees the existence of solutions of (10) is enunciated at the end of this section. Before that, the section presents some definitions and results of the convex analysis. In particular, we will use functions that are convex, lower semi-continuous (i.e. is l.s.c. if for every ), proper (i.e. ), and sub-differentiable ( if and for every ) in .
Example 1.
(1) If closed and convex, the indicator function is lower semi-continuous and convex (see Temam,22 Prop 2.3).
(2) If is convex, proper and semi continuous in , then (see Temam,22 Cor 2.5, Prop 5.2).
The solution space is defined as a Cartesian product of spaces and Sobolev spaces Some distinctive results of these spaces are:
There is a continuous immersion of in ,
is a dense subspace of
The containment of in is compact (usually symbolized by ) (see e.g. Adams and Fournier,23 Th 6.2 or Brezis,24 Th 9.16).
Multivalued monotone operators are now introduced.
Definition 2.Let , linear spaces. A multivalued operator is a relation from to (), that is, . In this case, if
Definition 3.Let be a Banach space and a multivalued operator.
(1) is monotone if for all , , it is verified
(2) is strongly monotone if there exists such that for any , one has
It is time to consider the problem
where , and is assumed to be reflexive and strictly convex ( is strictly convex if the sphere in does not contain any line segment).
Theorem 4.
Let such that, , dense in , and let proper, convex, and l.s.c. functions such that
is bounded (i.e. maps bounded sets into bounded sets),
is strongly monotone in
and there exists
where is the conjugate function () of
Then there exists a triple satisfing
Weak formulation
A variational or weak formulation of a physical model consists of rewriting the differential equations as functional acting on a space of functions. Such functionals defined by integrals will have a representation by derivatives whose order may decrease or even not exist by way of integration by parts. Due to the multiple connotations of the term “variational” it has been decided to call this section “weak formulation” so as not to confuse it with other formulations.25 In this regard, this section states the weak model of adhesive and elastoplastic contact as a function of u, p, and of the surface and volume loads acting on each solid in theorem 6.
We define the space as the set of triples
such that Since and have boundaries of class , the elements of can be extended to the boundary from the trace operator .26 The representation of this extension will be the pair where We define
and we represent with the space of the vector functions
such that For short we will use the notation 〈·,·〉 to indicate any of the products
Theorem 5.and are Hilbert space under the inner product
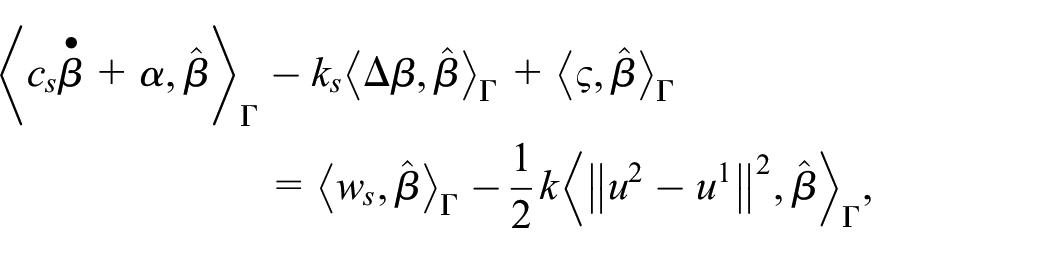
Equation (12) is immediate by (3). Multiplying the first equation of (7) by , the second by and integrating over ,
where
If and satisfy the relation (6), then for all
and by condition (8),
We will write the equations of the theorem 6 so that the adhesive contact model can be represented as a doubly non-linear problem. The sum of the terms (11)–(14) will be grouped taking into account the pairings and
where The first summation corresponds to the product where
while the second adding corresponds to the product where
The last term is the product between and where
Definition 7.We define by and the functional
and their respective subdifferentials and by
Definition 8.For we define the mapping by
for each
Problem 9. The weak problem of contact with adhesion and elastoplastic deformation is defined by:
Find such that
Definition 10.A solution of the Problem 9 is a triplet satisfying (20).
Existence of weak solutions
Theorem 11. is strongly monotone
Before making this proof, we will prove that
Theorem 12.The mapping is strongly monotone.
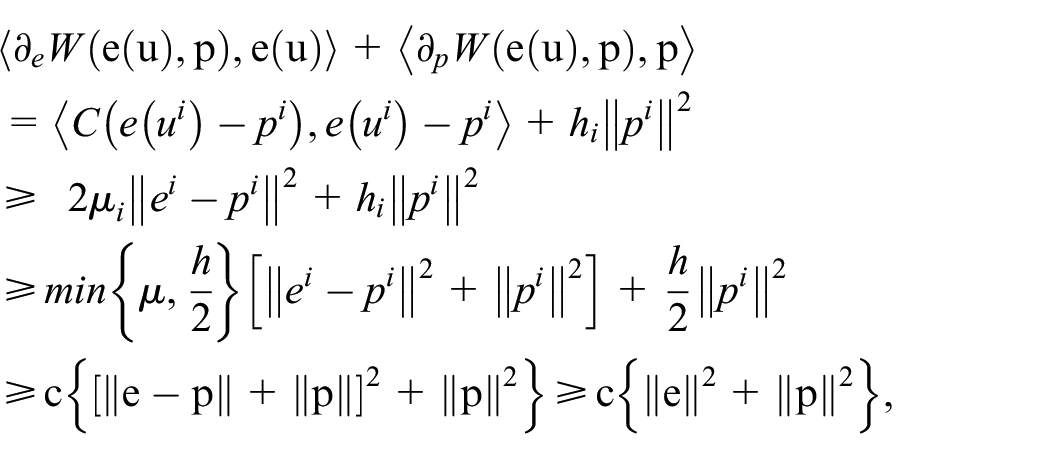
Proof. Since and are linear for all we will prove that there exists such that
For short we will symbolize and From equation (4), and Using the Einstein summation convention,
and by the Korn’s inequality,
By the linearity of and
Proof of Theorem 11. Because and are convex, proper and l.s.c,
We want to guarantee the existence of solutions through the Theorem 4, but not directly since is not bounded. So, we will prove the existence of solutions of the following differential inclusion:
with bounded, where
Later it will be proved that this solution also solves problem 9. In the rest of the document we will symbolize
and
Theorem 13.If then for each ,
Proof. Since , must be assumed. Consider the representation
Since and then for all
for each So
and for all
Theorem 14.Given with the hypotheses of the Theorem 13, then there is a weak solution to the problem 9.
Proof. It is not difficult to verify that and are proppers, l.s.c., and convex functions. Further, is monotone (see e.g. Showalter,27 p. 158) and bounded. By Theorem 13, for all and by Theorem 11 is strongly monotone. By Theorem 4, for each there exist that satisfy differential inclusion (23), this is,
If for some we prove that , then we will have proved that is a weak solution to the problem 9.
We must assume (otherwise and a weak solution to the problem is obtained). Therefore, implies and for each
If then there is a sub-sequence of and a sub-sequence such that and . It is clear that since Multiplying by the component of the inclusion (23),
so which contradicts that For this reason it follows that
and there exists such that for all This proves that and since for all it follows that is a weak solution to the problem 9.
Summary and conclusions
Differential inclusions that formulate a weak uni-directional adhesive unilateral contact problem, with elastoplastic deformation and hardening, were compressed as an abstract doubly non-linear problem, with unbounded multivalued operators.
The weak formulation allowed the derivative for displacement and adhesion field to be reduced from order 2 to order 1.
The model covers both, the rate-independent case as well as the mixed case (rate-independent for elastoplasticity and rate-dependent for adhesion).
The geometric requirements on the boundaries of deformable solids demand that they be of class and that they also satisfy the Korn inequality both for the displacements and for the bonding field; For this, null displacement is required in a part of the boundary of each solid.
The displacement variable was extended to the contact boundary to interact as an inner product with the bonding field.
The paper proves the existence of weak solutions of the model without using the energy solutions approach in similar papers. To obtain the proof of existence we construct a succession of doubly nonlinear problems that approximate the model under study. It was proved that each problem in the sequence has a solution, and that one of these models shares a solution with the original model.
Footnotes
Handling editor: James Baldwin
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This Research had the support of the Universidad del Atlántico and its Doctoral Training Program for professors - Resolution 1735 of October 13, 2016. Open access license granted by SAGE Publishing.
BonettiERoccaERossiR, et al. A rate-independent gradient system in damage coupled with plasticity via structured strains. ESAIM Proc Surv2016; 54: 54–69.
5.
RossiRRoubíčekT.Thermodynamics and analysis of rate-independent adhesive contact at small strains. Nonlinear Anal Theory Methods Appl2011; 74: 3159–3190.
6.
PanagiotopoulosCGMantičVRoubíčekT.Two adhesive-contact models for quasistatic mixed-mode delamination problems. Math Comput Simul2018; 145: 18–33.
7.
FremondM.Contact with adhesion. In: ItalianaUM (ed.) Phase change in mechanics. Berlin: Springer-Verlag, 2012, pp.109–113.
8.
HanWSofoneaM.Quasistatic contact problem in viscoelasticity and viscoplasticity. Providence, RI: American Mathematical Society, 2002.
9.
ChauOFernándezJRShillorM, et al. Variational and numerical analysis of a quasistatic viscoelastic contact problem with adhesion. J Comput Appl Math2003; 159: 431–465.
10.
BonettiEBonfantiGRossiR.Global existence for a contact problem with adhesion. Math Methods Appl Sci2008; 31: 1029–1064.
11.
ColliPVisintinA.On a class of doubly nonlinear evolution equations. Commun Partial Differ Equ1990; 15: 737–756.
12.
ColliP.On some doubly nonlinear evolution equations in Banach spaces. Jpn J Ind Appl Math1992; 9: 181–203.
13.
AkagiG.Doubly nonlinear evolution equations governed by time-dependent subdifferentials in reflexive Banach spaces. J Differ Equ2006; 231: 32–56.
14.
BarbuV.Nonlinear differential equations of monotone types in Banach spaces. Springer Monographs in Mathematics. New York, NY: Springer, 2010.
15.
StefanelliU.A variational principle for hardening elastoplasticity. SIAM J Math Anal2008; 40: 623–652.
16.
LieroMMielkeA.An evolutionary elastoplastic plate model derived via Γ-convergence. Math Model Methods Appl Sci2011; 21: 1961–1986.
HeitbrederTOttosenNSRistinmaaM, et al. Consistent elastoplastic cohesive zone model at finite deformations – variational formulation. Int J Solids Struct2017; 106–107: 284–293.
20.
XuHKomvopoulosK.Surface adhesion and hardening effects on elastic–plastic deformation, shakedown and ratcheting behavior of half-spaces subjected to repeated sliding contact. Int J Solids Struct2013; 50: 876–886.
21.
RoubíčekT.Nonlinear partial differential equations with applications. Basel: Birkhäuser Verlag, 2005, 321–356 p.
22.
TemamR.Mathematical problems in plasticity. Paris: Gauthier-Villars, 1985, 1–99 p.
BrezisH.Functional analysis, Sobolev spaces and partial differential equations. New York, NY: Springer-Verlag, 2011.
25.
KrabbenhøftK.A variational principle of elastoplasticity and its application to the modeling of frictional materials. Int J Solids Struct2009; 46: 464–479.
26.
EvansL.Partial differential equations. 2nd ed.Providence, RI: American Mathematical Society, 1998, 662 p.
27.
ShowalterRE.Monotone operators in Banach space and nonlinear partial differential equations. Math Surv Monogr1997; 49: 282.