
Abstract
The main purpose of this manuscript is to analyze the stability of the shock response of the electric vehicle (EV) powertrain when considering the electro-mechanical coupling effect. The nonlinear drive-shaft model of the powertrain is built using the Lagrange method, based on which the shock response equation is also deduced. Meanwhile, the number and properties of the equilibrium points are studied. Two kinds of equilibrium points, saddle node and central point, which can induce different dynamic behaviors are found. The simulation results show that the trajectory of the shock response may be unstable if the parameters are chosen in the region that has a saddle node. If the parameters of the powertrain fall into the region that has only one central point, the trajectory of the shock response will be attracted by the stable limit cycle. Therefore, to ensure that the shock response is more stable, the parameters should be chosen in the region where only one central point is present.
Keywords
Introduction
Due to the fact that the torsional dynamics may result in severe damage to the components of the powertrain, it has attracted wide attention in the past years.1,2 The torsional dynamics of the powertrain can be roughly divided into two types: torsional vibration and shock. Torsional vibration of the powertrain usually happens when there exist excitations, such as the harmonics of the engine. 3 In the meantime, resonance is an important part that should be considered when studying torsional vibration as it may destroy the powertrain when the frequency of the outer excitation equals or near the resonance frequency of the powertrain. 4 Generally, there are two kinds of methods that are usually used to control the torsional vibration of the powertrain: add some dampers to the powertrain 5 or design active control methods. Compared with the resonance, shock6,7 is a kind of transient behavior, such as judder8,9 or shuffle, 10 which usually happens during start/stop 11 or tip in/out. 12 The shock of the powertrain is considered to be more damaging as the working condition may change frequently. Since the shock of the powertrain can only be reduced but not eliminated, the dampers or active damping methods are also designed to reduce the influence of shock.13–16
As the vehicle industry progresses, electric vehicle becomes an inevitable trend. However, it has also introduced new problems to the vehicle powertrain, such as the electro-mechanical coupling effect17,18 that is caused by the addition of the driven motor. The corresponding torsional dynamics of the electric vehicle powertrain are also arisen from the electro-mechanical coupling effect. 19 As the electro-mechanical coupling effect is considered, the mathematical model of the powertrain is changed from a linear model to a nonlinear model. 20 Moreover, the dynamics and stability of the powertrain are also influenced by nonlinear terms. For instance, the peak of the resonance curve may be shifted which may make the resonance curve loses its stability when considering the effect of the nonlinear parameters. 21 The reason that causes the occurrence of the unstable dynamics to the resonance curve is the appearance of the fold bifurcation. However, if the parameters of the electric vehicle powertrain are properly designed, the fold bifurcation can be eliminated, and the unstable dynamics of the resonance can also be controlled. 4
Even though the torsional dynamics of the electric vehicle powertrain have been widely studied, there are still several issues that must be discussed properly, such as the stability of the shock response of the electric vehicle powertrain when considering electro-mechanical coupling effect. If the parameters of the electric part or the mechanical part are not chosen properly, the electric vehicle powertrain may not work stably after the impact. As a result, the analysis of the dynamic behaviors and stability of shock response becomes so important when designing the electric vehicle powertrain, which is also the focus of this manuscript.
In this manuscript, the electro-mechanical coupling effect of the electric vehicle powertrain is considered, and the influence of the parameters and the initial conditions on the stability of the shock response of the powertrain are discussed. The structure of this manuscript is organized as follows: firstly, the shock response equation of the powertrain is deduced in section 1; then, the number and the properties are discussed in section 2; thirdly, the shock response is simulated in section 3, and finally, the conclusions are drawn in section 4.
Modeling of shock response equation
The drive-shaft model, which contains the flexibility of the half shaft and the conversion ratio of the transmission and the final drive, is shown in Figure 1, where

Drive-shaft model.
Based on the Lagrange method, the equivalent torsional vibration model of the drive-shaft model can be described as follows:


where,
Since the mathematical model of the driven motor in the rotating coordinate system, which is often used when trying to control the dynamics of the powertrain, will increase the dimension of the total drive-shaft model and is not convenient for theoretical analysis. The analyzed form of motor torque is chosen here and is obtained using Maxwell’s equation.19–21 It is true that if the torque fluctuation of the driven motor is considered, the motor torque will contain a series of harmonics, and the torque can also be obtained using the Taylor expansion method.
The Maxwell’s electromagnetic torque of the driven motor,

where,
It is assumed that the nonlinear model receives an impact moment at the load end which is opposite to its rotation direction. The torsion angles at the driving end and the load end are

where,
The shock response equation (4), can be rewritten as the state-space form:

where,
Dynamics and stability analysis of shock response
Number of the equilibrium points
The equilibrium equation of (5) can be obtained as

Assuming that

where,

As shown, the number of the equilibrium points
22
is determined by
If
If
If
Stability and bifurcation of the equilibrium points
The Jacobian matrix of the equilibrium point can be written as:

The corresponding characteristic equation can be written as:

The root of the characteristic equation can be expressed as:

The stability of the equilibrium point22–24 can be classified into the following conditions:
If
If
If
Equilibrium curves in parameters plane
Based on the analysis in 2.1 and 2.2, the curves of equilibrium points versus
If
If
If
If
If

The equilibrium curves versus
Simulation analysis of the influence of the parameters on the shock response
To further analyze the stability of the shock responses when the parameters fall into different regions and with different initial conditions, the phase diagrams are drawn in 3.1–3.4, where the stability characteristics of the shock response are also analyzed.
Stability analysis of the shock response when there is only one saddle node
If

Phase diagram when
Stability analysis of the shock response when there are two saddle node and one central point
If

Phase diagram when
Stability analysis of the shock response when there are one saddle node and one central point
If
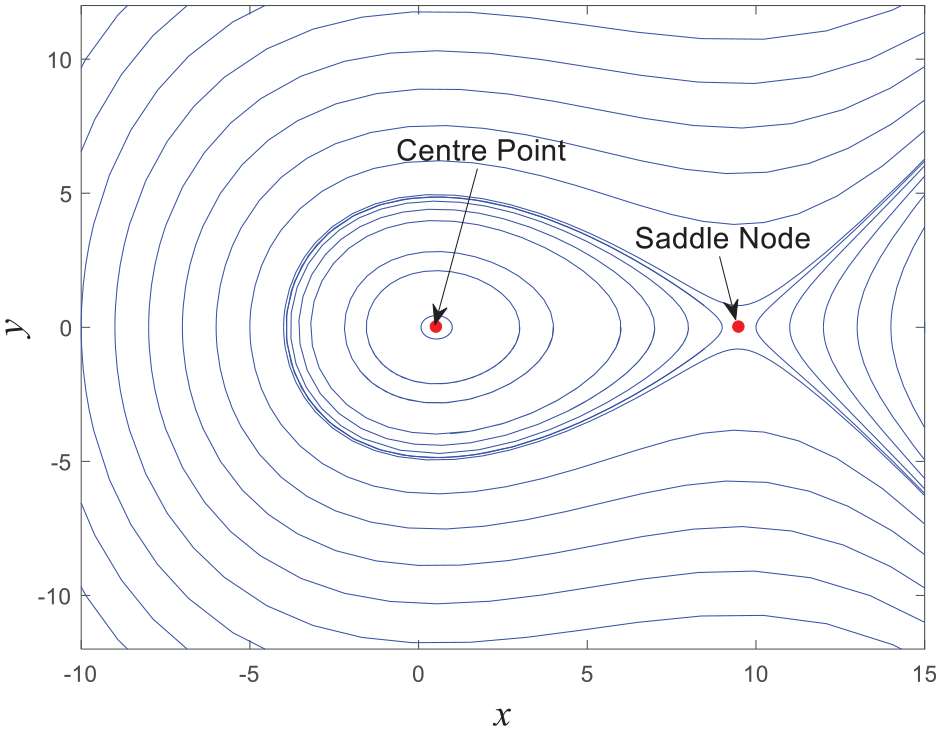
Phase diagram when
Stability analysis of the shock response when there is only one central point
If

Phase diagram when
Conclusions
The stability of the shock response of the electric vehicle powertrain is studied in this manuscript. The following conclusions are drawn:
The shock response is unstable if the parameters of the powertrain are chosen in the region that only has one saddle node;
The stability of the shock response depends on the initial condition after the impact if the parameters of electric vehicle powertrain are chosen in the region that has two saddle nodes and one central point or one central point and one saddle node;
To ensure the electric vehicle powertrain can work stably after the impact, the parameters of the powertrain should be chosen in the region where only one central point is present.
Footnotes
Handling Editor: Dr James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (51875258, 12072311).