
Abstract
The optimization of energy control strategy is one of the key technologies of plug-in hybrid vehicles (PHEVs) to improve the capabilities of energy saving and emission reduction. In order to improve fuel economy of PHEV, adaptive equivalent minimum fuel consumption strategy (A-ECMS) is proposed. Firstly, optimization methods of different energy control strategies are analyzed, and the Pontryagin’s Minimum Principle (PMP) and the equivalent fuel consumption theory are selected to optimize energy control strategy of the PHEV. Secondly, the configuration of PHEV and research objectives of the power control system are determined. Thirdly, the energy control problem is analyzed by the PMP theory, and the improvement measures for the energy control problem are put forward by the equivalent minimum fuel consumption strategy (ECMS). Fourthly, after analyzing the relationship between the equivalent factor and reference SOC, adaptive equivalent minimum fuel consumption strategy (A-ECMS) model is established by MATLAB/Simulink. Finally, combined with Cruise software, the PHEV simulation model is simulated, and the simulation results are analyzed. The results show that compared with the CD/CS energy control strategy, the A-ECMS energy control strategy reduced the 100 km fuel consumption of the vehicle by 7% under three times WLTC driving condition.
Keywords
Introduction
Compared with the traditional control strategy of HEVs, PHEV not only has a large power battery page, but also can obtain electricity through an external charger. 1 Therefore, the main function of the energy control strategy is to improve the efficiency of the engine and the efficiency of the battery pack. At present, energy control strategies can generally be divided into four types: logic threshold energy control strategy, 2 global optimization energy control strategy, 3 instantaneous optimization energy control strategy, 4 and intelligent optimization energy control strategy. 5
The logic threshold control strategy is mainly designed according to the designer’s engineering experience and the working characteristics of every power component, which has many advantages, such as simple design, fast response, good robustness, and so on. 6 Therefore, the hybrid power system can be divided into different working modes by a series of threshold values. Du et al. 7 used the improved NSGA_II algorithm to optimize logic threshold value, proposed a real-time control strategy for multi-mode hybrid electric vehicle. However, the logic threshold control strategy cannot guarantee the optimal fuel economy of PHEV under changing working conditions.
The global optimization energy control strategy is a reverse optimization control strategy, which ensures the vehicle distribute energy optimally under a predefined driving cycle. Li et al. 8 designed a novel correctional DP algorithm, which is brought forward to balance the optimization of fuel economy and drivability and can guarantee that the engine and the electric machine work in the high-efficiency area with optimal energy distribution. However, the DP algorithm needs to predefined driving cycle and reverse solution requires a lot of complex operations. Therefore, the global optimized energy control strategy can only be used as a theoretical optimal solution. 9
Compared with DP algorithm, PMP algorithm is a typical instantaneous optimization algorithm, not only has the advantage of less computation, but also can meet the real-time requirements by appropriately improving. Ouddah et al. 10 used the PMP algorithm to obtain the bus’s optimal energy control strategy based on fixed line in off-line state, and to realize the online application of energy control strategy through SOC feedback regulation. Whether DP or PMP algorithms are employed, driving cycle’s information needs to be obtained in advance. However, future speed and other driving conditions are difficult to obtain accurately. Therefore, the above optimization algorithm is difficult to be applied to vehicle controller.
Intelligent control energy control strategies are used to optimize PHEV energy allocation by the artificial neural network algorithm, genetic algorithm, particle swarm optimization, and other intelligent control algorithms,. Chen et al. 11 used the particle swarm algorithm to optimize four thresholds of the proposed three rule-based strategies and achieve the efficient utilization of vehicle energy. But the intelligent control energy control strategy often needs a lot of data to train the model, so that the result of its optimization often depends on the training data.
The energy control strategy has developed from single goal and single system to multi-objective integration optimization, information sharing of multi-system, and from rule-based control strategy to intelligent control strategy. As shown in the above research, the most logical threshold energy strategies are designed based on the working characteristics of the engine, the electrical machinery and other power components. 12 The optimized energy control strategy is mainly regard the energy allocation problem of power system as mathematical problem with constraint, and then the logical threshold control strategy is continuously improved by the corresponding optimization control theory, so as to overcome the shortcomings of logical threshold control strategy and improve the fuel economy under different driving conditions. At the same time, the control results are formed into a simple MAP diagram which is obtained by the optimization algorithm, and the control rules can also be used to control the power system quickly and effectively. Therefore, there is no strict standard for the division of energy control strategies, but only different forms of energy control strategies. The different types of control strategies can be converted to each other. 13
The organizational structure of this paper is as follows. Section II determines the objectives and energy optimal control methods of the PHEV, and uses PMP theory to solve the optimization problem of energy control. In Section III, the ECMS optimized energy control strategy is designed according to the PMP optimal algorithm and the ECMS energy control model is established. In Section IV, the A-ECMS energy control model is proposed. In Section V, the simulation and test validation is implemented. Finally, Section VI concludes this article.
Optimal control objective function of hybrid power system and its solution
According to the power transfer mode and the layout structure of each power component, the PHEV configuration can generally be divided into three types: series type, parallel type, and mixed type. This paper uses the PHEV of coaxial parallel configuration as the research object, and its structure is shown in Figure 1. The engine and motor are connected to the drive shaft through a mechanical coupling device and can output a certain proportion of power. Therefore, the PHEV not only can be driven by engine and motor alone or together, but also braking energy can be recovered by motor. Its configuration has smaller power components, such as lower capacity power battery page and smaller motor, which greatly reduces the quality and cost of the whole vehicle. However, because of the mechanical connection between engine and wheel, the working efficiency of engine is greatly affected by driving conditions. The basic structural parameters of the vehicle are shown in Table 1.

Power system structure of the parallel PHEV.
Basic structure parameters of PHEV.

Vehicle model
The vehicle model mainly includes engine model, motor model, and power battery pack model. Because only the fuel economy and power of the vehicle are analyzed, these models are all mathematical models. The details are as follows 2.1.1 Engine model.
In the paper, the experimental data modeling method is used to establish the engine model, which mainly considers its input and output characteristics, simplifies its internal thermodynamic process. According to the torque and speed of engine, its instantaneous fuel consumption can be determined by using interpolation method, as shown in Formula (1).

where,
Motor model
The paper only considers the input and output characteristics of the motor, and does not consider its internal complex working principles. The motor model is established by the experimental data modeling method, and the drive and power generation parts of motor are symmetrically processed. According to output torque and speed of motor, the work efficiency of the motor is obtained by looking up table and interpolating. Among them, the torque of motor is positive, which means that the motor drives the vehicle just as a motor, and the torque of motor is negative, which means that the motor works as a generator, and power of motor can be described in Formula (2).

where,
Power battery model
The paper does not consider the effect of the temperature change on the battery efficiency, and the ambient temperature is set at 25°C. If only study the open circuit voltage, internal resistance and current of power battery pack, and establish the first-order RC model of power battery pack, then its current can be expressed as a function of power, open circuit voltage, and internal resistance, as depicted in formula (3).

where,
Using the ampere hour method, the SOC of power battery can be expressed as formula (4).

where,
Determination of optimization target and solving method
Optimization objects of energy control strategy are various, such as fuel consumption, exhaust emission, and operating cost. 14 In the paper, the minimum fuel consumption of PHEV is selected as the objective function, and power battery pack SOC is chosen as the state variable. Its main constraints can be included in formula (5).

where,
At present, three kinds of solutions can be employed to optimize the objective function for PHEV, which are the dynamic programming, Pontryagin minimum principle and the minimum equivalent fuel consumption.
The dynamic programming can reversely solve the above objective function, and get the minimum fuel consumption and the best exhaust emission performance, so it is theoretical optimal solution and can be used as the optimal bench mark of other solving methods. 15 On the premise of the known vehicle driving cycle, the continuous variables of the power system are discretized by DP theory, which realizes the global optimal distribution of the vehicle power in the whole driving process. 16 However, Reverse solution requires complex calculation process, which stops DP algorithm from carrying out real-time control.
The Pontryagin’s minimum principle constructs Hamilton function which is solved by introducing Lagrange operator its control effects is close to DP algorithm. 17 Although the algorithm has good analytical properties, the solution is more complicated.
In the ECMS energy control strategy, the electric energy consumption of motor is equivalent to the fuel consumption of the engine by the equivalent factor, and the optimal torque distribution between engine and motor can be obtained by solving the minimum equivalent consumption function. 18 Zeng et al. 19 optimized the equivalent factor by particle swarm algorithm, obtained the equivalent factor MAP of the SOC and mileage, and made the algorithm have a good control effect. ECMS energy control strategy can obtain control effect, which is very close to the optimal global optimization and does not need to predefined driving condition. Therefore, this method can realize real-time control of vehicles.
According to the above analysis, compared with dynamic programming, the ECMS energy control strategy can be used for real-time control, and can obtain almost the same fuel economy. Besides, it can be approximated to the PMP control algorithm if the voltage and internal resistance of the power battery do not change with the SOC of the power battery. Furthermore, the selection of equivalent factors determines the control effect of ECMS energy control strategy, and the equivalent factors in ECMS energy control strategy are equivalent to the cooperative state variables in PMP algorithm. 20 Therefore, objective function in energy control strategy can be solved by solving Hamiltonian function method. 21 In the paper, ECMS energy control strategy is designed based on the principle of PMP, and A-ECMS energy control strategy is proposed.
The minimum optimization principle of Pontryagin’s minimum principle
Pontryagin’s Minimum Principle (PMP) is also known as the Pontryagin’s maxima principle, and is the optimal control theory which is proposed by the former Soviet scholar. It is mainly used to solve continuous or discontinuous optimal control problems, and is an important part of modern control theory to solve optimal control problems after replacing the classical variational method.
22
PMP principle proposes that a necessary condition for a performance index function to reach the minimum is that the optimal control sequence
According to optimization objective of the control system, the Hamilton function is established, and the necessary conditions and the boundary conditions for obtaining the optimal solution of the Hamilton function are listed.
When
The necessary conditions of the optimal solution are obtained by optimal control decision
Energy control model based on PMP
In the paper, the fuel consumption of the whole vehicle is chosen as the objective function, which makes the fuel consumption of the whole vehicle minimize under certain working conditions. The PMP algorithm can optimize the objective functions of exhaust emission, battery SOC.24,25 On the premise of the PHEV dynamics, the whole vehicle power system is considered as a complex nonlinear system, and the minimum fuel consumption problem is equivalent to the constrained optimal control problem.
The global optimization problem of the energy control is transformed into several instantaneous optimization problems with Hamilton function by introducing the cooperative state quantity. The Hamilton function is equal to the sum of the engine instantaneous fuel consumption and product of the synergetic state variable and SOC instantaneous variation. 26 The torque distribution of power system will get the corresponding results by solving the minimum value of Hamilton function at each moment. It should be noted that the initial value of the synergetic state variable will vary with different driving events.
The Hamiltonian function of PHEVs is established by introducing the synergetic state variable.

where,

The optimal result

The synergetic state transfer equation is as follow.

State variables and synergetic state variables satisfy the following constraints under the optimal solution of system control variables.




where,
Because the instantaneous fuel consumption of the engine is mainly affected by the torque and speed of engine. The state transfer equation of the control system can be described in formula (14).
Therefore:
Although the Hamiltonian operator has the possibility to use the PMP control strategy for real-time control, it is difficult to obtain the initial value of the synergy state and update the value of the synergy in practice. Therefore, the ECMS energy control strategy is designed according to the necessary conditions which use the PMP control algorithm to solve the optimal solution of the objective function.
Optimization design of the energy control strategy
ECMS control theory
ECMS is a semi-analytical method based on PMP theory, which has advantages of the fast calculation speed, strong real-time performance, compatibility with any configuration HEV and no need for global condition information. 27
The working principle of the ECMS is shown in Figure 2. Power battery is used as a virtual engine. The total fuel consumption is equivalent to the sum of the fuel consumption by engine and fuel consumption of virtual engine which is converted from electricity consumed by the vehicle virtual engine. 28 At the stage of electricity consumption, the PHEV adopts the working state of motor drive and engine as auxiliary. At this time, most of the electricity consumed will be replenished through the power grid in the future, and a small amount of electricity consumed will be replenished through braking energy recovery. At any time in the future and at any given operating point, power battery pack will have charging and discharging working states, and the energy flow of the PHEV will be converted into equivalent fuel consumption by the equivalent factor. If the motor charges the power battery pack, the equivalent fuel obtained by virtual engine is equivalent to being put back into the tank. Here, it is equivalent to saving fuel consumption, and fuel storage rate is negative.

Working process of the ECMS under the states of power battery charging and discharging.
The equivalent fuel consumption factor determines the oil-electric conversion efficiency of the PHEV power system in the ECMS energy control strategy. If the equivalent factor becomes larger, the power battery discharge is reduced, whereas the power battery discharge is increased. Since the electric energy consumed by the vehicle is converted to fuel consumption by a certain coefficient, the total instantaneous equivalent fuel consumption of the PHEV at time t is:

where,
Design of ECMS energy control strategy
On the premise of known driving conditions, the equivalent factor

In the process of solving the optimization objective function of energy control offline, the variation range of the synergy state variable is very small, which can be regarded as a constant.

If the synergetic state value is a constant, the first term of formula (16) is expressed as the instantaneous fuel consumption of engine, and the second term is expressed as the instantaneous equivalent fuel consumption of motor the ECMS optimization function is very similar to Hamilton function. Therefore, the ECMS Hamiltonian function

where, the synergy state variable
When the required torque is known, the optimal output torque sequence

where,
Since the PHEV has a large power battery pack and the SOC changes greatly, the SOC rate of change will affect parameters of the power battery pack. Differential equations of the SOC change cannot be considered in the actual work of the power battery pack. Therefore, the equivalent factor needs to be adjusted accordingly with time.
According to the above analysis, the ECMS algorithm transforms the global optimization control problem of the hybrid power system into local optimization problem, and applied to the real-time optimization control problem. Therefore, the equivalent fuel consumption rate of the engine and electrical machinery output power under each combination is calculated within the working constraints of the engine and motor, and the control combination which satisfies the minimum equivalent fuel consumption rate of the vehicle is selected as the optimal control output state. The ECMS control model framework is shown in Figure 3.

ECMS’s energy control strategy architecture.
Solving process of the Hamiltonian function
ECMS objective functions are mainly solved by analog approximation. Through the analysis of the ECMS energy control strategy in the previous section, the demand torque and speed of the vehicle are calculated at any time, and the all output torque combinations of the engine and motor are obtained under constraints of the objective function. Then the equivalent fuel consumption rate of all combinations is calculated according to the motor efficiency characteristic diagram, engine efficiency characteristic diagram and fuel consumption MAP diagram. Finally, the optimal combination control variable is selected, which can make the engine work in the high efficiency region and minimize the objective function value. The Hamilton function solution process is shown in Figure 4.

Solving process of the Hamilton function.
The implementation steps are as follows:
Determination of the control variable’s range
According to parameters of the vehicle velocity, power battery pack SOC, engine output power, and the total demand torque of vehicle is obtained at the present time. The range of the control variable is as follows.

where,
When the motor acts as a generator, the maximum generation torque of the electric generator is as follows.

where,
When the electrical machinery acts as the motor, the maximum output torque of the motor is as follows.

where,
Through the above analysis, the output torque of engine is as follows.

All alternative engine operating points are determined within total demand torque and constraints of vehicles, and combined with engine fuel consumption map, the instantaneous engine fuel consumption
Combined with the working efficiency MAP chart of the electrical machinery and the equivalent factor
Repeating calculation of (2) and (3) steps, instantaneous total fuel consumption of vehicle is calculated according to
Calculation of the equivalent fuel factor
In the solving process of the equivalent factor, the SOC value is set to 0.7, the engine and motor speed is set to 2500 rpm, the initial value of the equivalent factor is set to −3 kg, the demand torque of the vehicle is set to 90 N m. The optimal output torque sequence of the electrical machinery is obtained by solving the minimum value of Hamilton function based on ECMS.
The maximum output torque of the engine is 150 N m by solving Hamilton function, and the mass flow of the engine varies with the engine output torque as shown in Figure 5.

Instantaneous fuel consumptions change of the engine with the engines output torque.
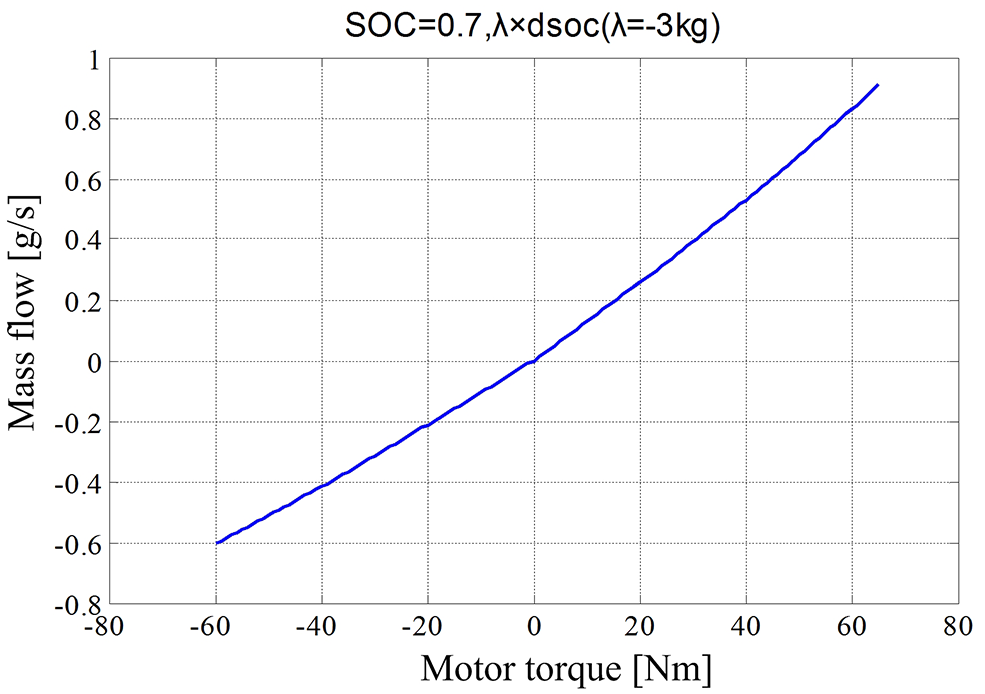
When the electrical machinery speed is 2500 rpm, the output torque of the electrical machinery is −75∼75 N m, and the instantaneous change rate of SOC with time is as shown in Figure 6. The curve of the SOC instantaneous change rate

The battery SOC’s change with the motor torque.
Equivalent instantaneous fuel consumption of the motor output torque.
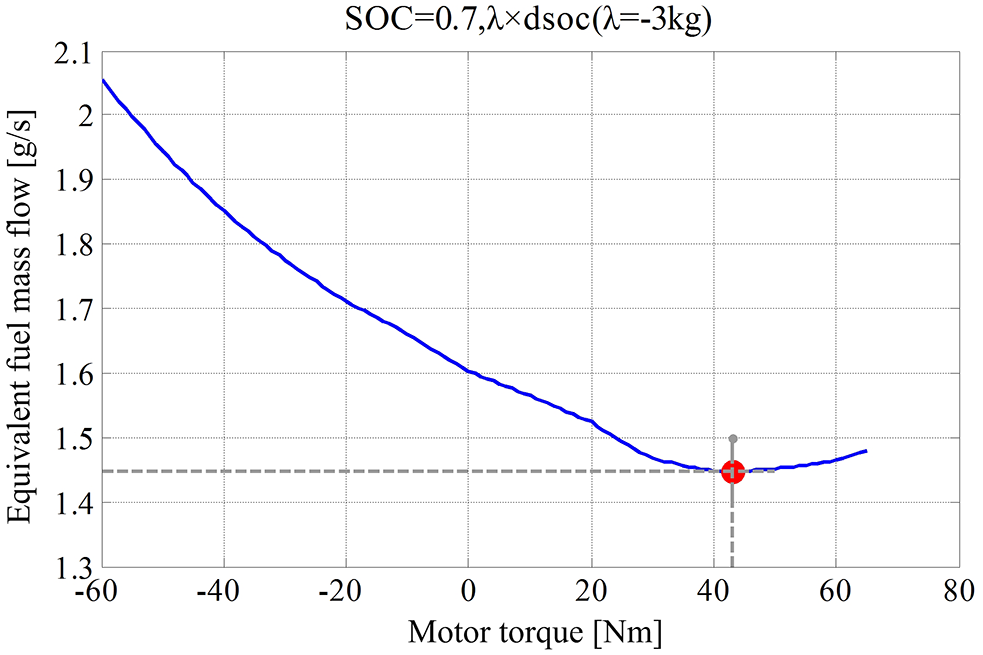
Equivalent fuel consumptions change with the motors output torque.
A-ECMS energy control strategy based on reference SOC
In the paper, the A-ECMS energy management strategy is proposed by the reference SOC, so as to improve the robustness of ECMS energy management strategy. Under different initial SOC of power battery pack, SOC trajectory of the optimal should show an approximately linear decline with the mileage.
30
According to the driving mileage, the energy control strategy is designed to make SOC reach the minimum value at the end of trip. Reference SOC principle designed in this paper is shown in Figure 9. Among them, the abscissa represents mileage, the ordinate represents SOC, the thin line drawn between the two points (0,

where,

Reference SOC’s changes of power battery of with mileage.
In the actual driving process of vehicle, the difference

where,

where,
Simulation and analysis
According to the PHEV structure, the vehicle model is built by Cruise software and shown in Figure 10. The Simulink model of A-ECMS and ECMS energy control strategy are integrated into vehicle controller by the interface and Cruise software. Through the joint simulation, the performance evaluation of the CD/CS energy control strategy and the proposed A-ECMS and ECMS energy control strategy are verified by simulation under the three times WLTC driving condition shown in Figure 11. The initial SOC is 0.8, and the minimum SOC is 0.4. Besides, the optimal equivalent factor in the ECMS energy control strategy under three times WLTC driving condition is −1.82 kg and is a fixed value. The simulation results are analyzed from the changes of SOC, equivalent factor, engine working point, and fuel economy.

Parallel PHEV model based on Cruise software.

3 × WLTC cycle condition.
The drop of SOC with time is shown in Figure 12. It is not difficult to find that under the CD/CS energy control strategy, the SOC of the power battery quickly drops to the minimum value, and then goes into the CS phase and fluctuates near the minimum value. The energy control strategies of A-ECMS and ECMS can ensure the SOC reach to the minimum at the end of trip, which makes full use of the electric energy. The Energy control strategies of A-ECMS and ECMS are almost the same in the whole, but equivalent factors in the energy control strategies of A-ECMS and ECMS are different, which leads to the different torque distribution between engine and motor, and the details of SOC decline are different from each other.

SOC change’s curve under 3 × WLTC condition.
Figure 13 shows the change of equivalent factor of A-ECMS energy control strategy with the driving mileage. It can be seen that reference SOC penalty factor has modified the equivalent factor, which ensures the full and reasonable utilization of electric energy.
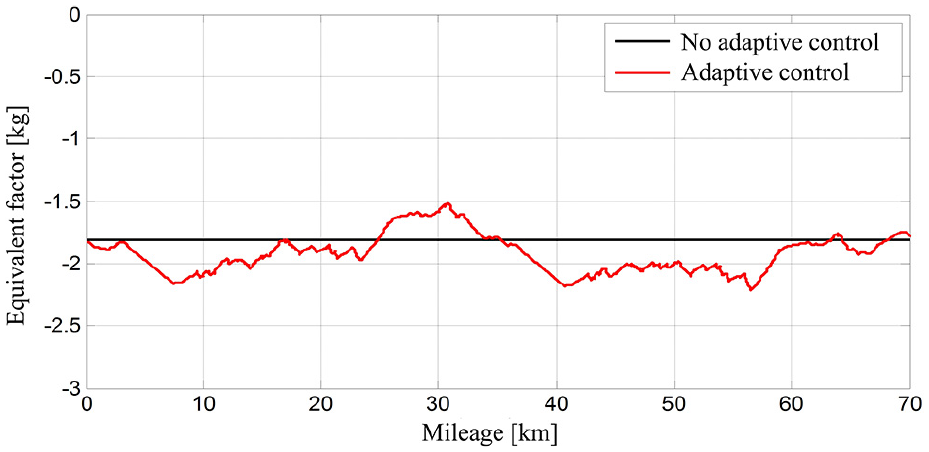
Fluctuation curve of equivalent factor with mileage.
Figure 14 shows the engine operating point distribution and efficiency ratio obtained from the simulation of CD/CS, ECMS, and A-ECMS under three times WLTC condition. It can be seen that under the CD/CS energy control strategy, a large part of engine working points are concentrated in the low efficiency area, mainly because the strategy can only switch working mode and distribute torque according to predefined rules, and cannot adjust adaptively according to the driving conditions of vehicle, Therefore, it is impossible to reasonably distribute electric energy according to the driving conditions. Compared with CD/CS energy control strategy, the ECMS energy control strategy improves fuel economy and makes engine work in high efficient working area. However, the fuel economy and working area of engine are not as good as A-ECMS energy control strategy because its equivalent factor is fixed. A-ECMS energy control strategy can automatically adjust equivalent factor, and then optimally distribute output torque of engine and motor, so that engine can work in the high efficiency area during the whole driving process, which is also the main reason that A-ECMS strategy can save fuel consumption.

Engine working points and efficiency ratio under: (a) CD CS energy control strategy, (b) ECMS energy control strategy, and (c) A-ECMS energy control strategy.
Table 2 describes the fuel consumption results of 100 km under three energy control strategies of CD/CS, ECMS, and AECMS. It can be seen that fuel consumption of CD/CS energy control strategy is the highest under CD/CS energy control strategy. While fuel consumption under the energy control strategy of ECMS and AECMS are relatively close, and compared with fuel consumption of CD/CS energy control strategy, the fuel saving rate can reach 7% and 6.41% respectively.
Fuel consumption per 100 km of three energy control strategies under 3*WLTC condition.

Conclusions
In order to reduce the PHEV fuel consumption and improve the electricity utilization of battery, these papers adopt the PMP and ECMS algorithm to optimize energy control strategy of PHEV. Firstly, the parallel P2 configuration of PHEV is chosen as the object of this paper through analyzing the PHEV structures, and the PMP is selected as the optimal control algorithm by studying different algorithms. Secondly, the PHEV optimization control problem is analyzed, and the optimization control objective function of power system is established by combining the PMP theory. Considering the constraints of the control system, the objective function of the PHEV is solved. Thirdly, combining with the theory of the equivalent fuel consumption and introducing the equivalent factor, ECMS energy control strategy is designed according to necessary conditions of the PMP solving the optimal problem. In order to improve the robustness of ECMS energy control strategy, A-ECMS energy management strategy is proposed. Finally, based on the MATLAB/Simulink and Cruise software, energy control strategy models of the CD/CS, ECMS, A-ECMS, and PHEV model are built and simulated by the joint simulation under the WLTC driving condition. The results show that A-ECMS energy control strategy can improve the CD/CS fuel economy, which ensures good performances of fuel economy of PHEV, improves the engine efficiency, and makes full use of electric energy.
Future studies should focus on integrating the developed procedure of the PHEV control model into a computer design support system for verifying the effectiveness of the designed control strategy by the real vehicle experiment. 31 Moreover, more advanced optimization algorithms need to consider the adaptive ability of the each optimal control strategy to different working conditions
Footnotes
Handling Editor: James Baldwin
Author contributions
In the paper, Dapai Shi analyzed the relationship between the equivalent factor and reference SOC, and established energy control model of AECMS and ECMS by MATLAB/Simulink. Kangjie Liu simulated the model by combining with Cruise and Simulink, and written and revised manuscript. Yun Wang analyzed the energy control problem by PMP theory and put forward the improvement measures for the energy control problem. Ruijun Liu determined the configuration of PHEV and the research objectives of the power control system. Shicheng Li and Yanzhao Sun analyzed optimization methods of different energy control strategies and determine the optimal control algorithm. All authors have read and agreed to the published version of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by Central Government of Hubei Province to Guide Local Science and Technology Development(2020ZYYD001), Hubei Superior and Distinctive Discipline Group of “Mechatronics and Automobiles” (XK Q2021007), Hubei Key Laboratory of Power System Design and Test for Electrical Vehicle (ZDSY202106).
Data availability
The data that support the findings of the study are available from the corresponding author upon reasonable request.