
Abstract
In order to improve the bearing capacity of soft actuators, this article presents the development of the rigid-hoop-reinforced (spring or steel hoop) multi-DOF soft actuator. The actuator is composed of a rotary module with spring reinforcement on the silicone rubber-based body and a bending module with steel hoop reinforcement on the body. Compared with fiber-reinforced actuators, the bearing capacities of rigid-hoop-reinforced actuators made of 65Mn spring steel are improved. The radial and the axial bearing capacity for the bending module and the rotary module is raised by 29.6%, 28.2%, 30.6%, 49.6% respectively; under the same pressure, the spring-reinforced interval increases the maximum rotary angle of the rotary module, the steel hoop-reinforced interval increases the maximum bending angle of the bending module; with the same reinforcement type, the bending module with reinforcement interval of 10 mm has good bending characteristics that the bending angle changes with the pressure gently; the lower the hardness of silicone rubber base body, the better the adaptability and flexibility of the actuator, and the higher the hardness, the greater the bearing capacity of the actuator. Due to the above advantages, the rigid-hoop-reinforced multi-DOF soft actuator can be applied to medical devices which need high load-carrying capacity.
Introduction
Comparing with traditional robots, the soft robot is a highly active research topic with a wide range of applications such as in medical, deep-sea or other harsh environments robots owing to its flexibility, compliance, and compatibility. 1 In the field of medical applications, for example, Matteo et al. 2 presented the suitable technologies that can be used in the development of an innovative surgical robot with the abilities of stiffening, elongation, and bending. Wang et al. 3 of Shanghai Jiao tong University in 2016 developed a cable-driven soft robot system to alleviate the burden of surgeons and improved the accuracy of the operations. In the field of deep-sea applications, for example, Andrew et al. 4 of Massachusetts Institute of Technology in 2014 described an autonomous soft-bodied robotic fish that is both self-contained and capable of rapid, continuum-body motion using fluidic elastomer actuators. Phillips et al. 5 of Harvard University in 2018 presented a soft robotic manipulator for deep-sea biological sampling. In other harsh environments, for example, Michael et al. 6 of Harvard University in 2014 used composites consisting of silicone elastomer, polyaramid fabric, and hollow glass microspheres to fabricate a soft robot, which can be resilient to a variety of adverse environmental conditions including snow, puddles of water, direct exposure to flames, and the crushing force of being run over by an automobile.
Soft actuators, which are the most important components of soft robots, have attracted the attention of many scholars due to their ability to achieve multiple degrees of freedom (DOF).7,8 Comparing with traditional electromechanical systems, soft actuators have advantages of multi-DOF and simple control, because soft actuators use silicone rubber as the base and cooperate with pneumatic or hydraulic drive mode.9,10 The soft actuator can be divided into rotary module and bending module according to its mode of action. When driven by pneumatic or hydraulic pressure, the silicone rubber base expands, adversely affecting the motion of soft actuators. To deal with this question, Martinez et al. 11 of Harvard University in 2013 designed a soft robot arm for three-dimensional motion, and improved the outer surface of the arm with fold structure, thus avoiding the expansion of the arm and making the bending motion more flexible. Gong et al. 12 of Beijing University of Aeronautics and Astronautics in 2016 proposed a soft three-dimensional moving manipulator, which proved that modifying the texture of the surface of the soft manipulator can constrain the radial expansion. The above two methods used the pleated surface structure to solve the problem of expansion of the bending actuator, but brought new problem, that is, the diameter of the bending actuator is increased correspondingly resulting in a larger volume. To deal with the emerging question, Connolly et al. 13 of Harvard University in 2015 studied the influence of fiber angle on the actuator, and designed a soft-worm-like robot that can realize bending, rotation, telescopic, and other actions. Galloway et al. 14 of Harvard University in 2016 used fiber lines to restrain bending actuator to realize bending action. Kurumaya et al. 15 of Tokyo Institute of Technology in 2018 modularized the rotary actuator and the bending actuator on the basis of the predecessors and conducted experimental tests on the influencing factors of the actuators by varying fiber number and silicone hardness with both pneumatic and hydraulic pressure. While using fiber lines to restrain the bending actuator, on the one hand, the problem of expansion of the bending actuator can be avoided, on the other hand, it will not increase the volume of the bending actuator. However, the fiber-reinforced method also brings new problem: it has high flexibility, but it still has the shortcomings of insufficient rigidity and small payload. In order to address the above disadvantages, Abeach et al. 16 of University of Salford in 2018 presents the design and testing of a variable stiffness, three fingered soft gripper which uses pneumatic muscles to actuate the fingers and granular jamming to vary their stiffness, but it is more difficult for the soft gripper to restore the initial state because of the existence of gravity and friction. Although the soft hoop-reinforced pneumatic actuator has a certain improvement in load performance compared to the conventional soft actuator, to the best of our knowledge, the question of weak rigidity and poor load performance of the soft actuator has not yet been well solved. Therefore, in our article, a new rigid-hoop-reinforced (spring or steel hoop) soft actuator was put forward to improve the bearing capacity of its rotary and bending modules.
Next, this paper is organized as follows. The structure design, fabrication method of the rigid-hoop-reinforced multi-DOF soft actuator are introduced in Section 1 and 2. In Section 3, the influencing factors of rotary module and bending module (reinforcement type, reinforcement interval, coupling effect between the reinforcement, and the silicone rubber base body) are simulated and verified by four groups of experiments. And the bearing capacities of rotary module and bending module are tested. Section 4 provides the summary and some extensions of our study.
Design methods
The rigid-hoop-reinforced multi-DOF soft actuator is composed of a rotary module and a bending module which realize the axial rotation motion and the space bending motion respectively.
Rotary module
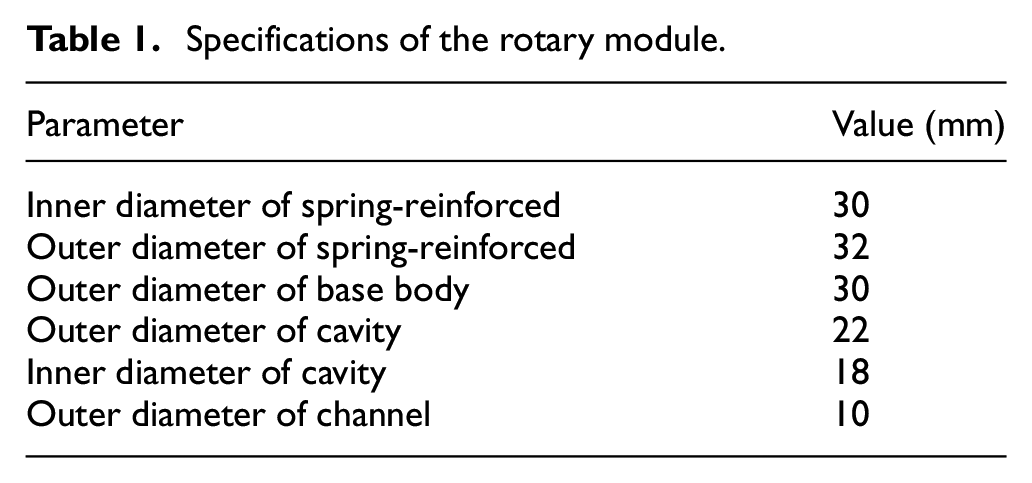
Figure 1 shows a rotary module with the spring reinforcement on the silicone rubber base body. There are two symmetrical cavities inside the base body and a built-in channel for placing the trachea. Spring reinforcement is fitted to the outer surface of the base body with an interference fit. Figure 1(a) and (b) are the schematic view of the outline and the schematic cross-sectional view of the rotary module separately. The nominal dimensions of the rotary module are shown in Table 1. The working mechanism of the rotating module is as follows: The radial expansion of the base body can be achieved by simultaneously applying air pressure in the two cavities. 17 The spring reinforcement causes the base body to twist in the direction of the spiral of the spring, thereby achieving the deflection of the rotary module.
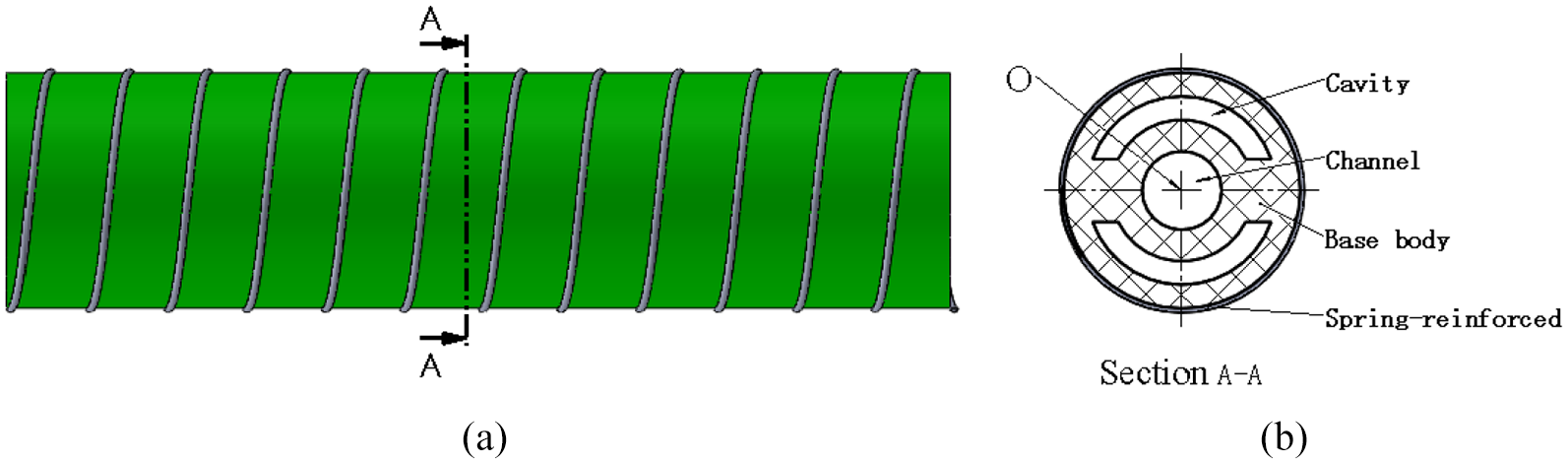
Schematic diagram of the rotary module: (a) the schematic view of the outline and (b) the schematic cross-sectional view.
Specifications of the rotary module.
Bending module
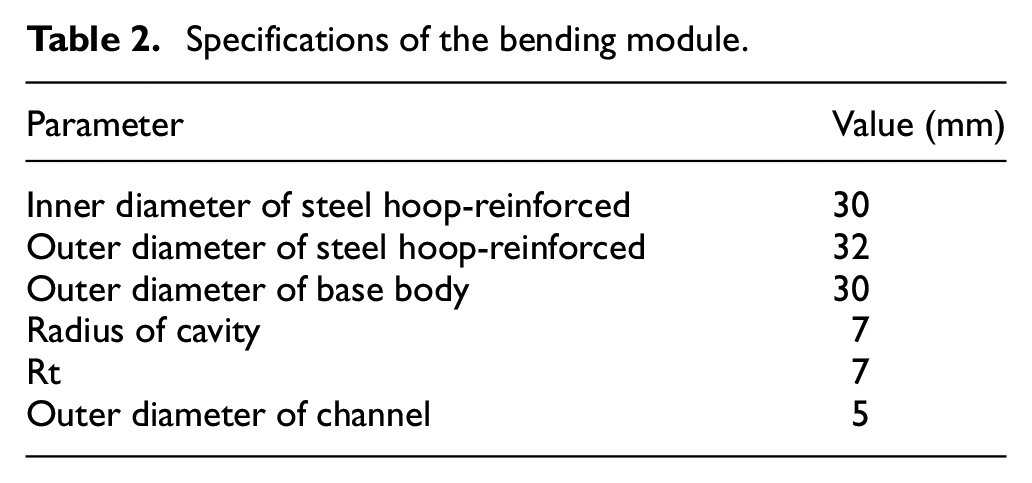
Figure 2 is a bending module with the steel loop reinforcement on the silicone rubber base body. There are three semicircular cavities inside the base body and a built-in channel for placing the trachea. The steel loop reinforcement is fitted to the outer surface of the base body with an interference fit. Figure 2(a) and (b) are the schematic view of the outline and the schematic cross-sectional view of the bending module separately. Three cavities are equiangularly arrayed around the point O, and the center of the three cavities is located on a circle having a center of point O and a radius of Rt. The nominal dimensions of the bending module are shown in Table 2. The working mechanism of the bending module is as follows: The expansion and bending of the base body can be achieved by applying the air pressure in either cavity. However, the constraint of the steel loop limits the expansion of the base body.

Schematic diagram of the bending module: (a) the schematic view of the outline and (b) the schematic cross-sectional view.
Specifications of the bending module.
Fabrication methods
The production of the rotary module is divided into a base body fabrication and an external spring reinforcement arrangement, 17 and the bending module is produced in a similar process.
Base body fabrication
Base body material selection
The base body material is composed of edible silicone rubber (IHCR950, brand: Bluestar International, origin: Shanghai, China) and dimethyl silicone oil (PMX-200, brand: Fuyu, origin: Shanghai, China) in a certain ratio. Referring to Table 5, the base body material of different hardness can be obtained by changing the ratio.
Base body fabrication process
The liquid by the configured base body material is poured into the already-printed mold, and after curing for 8 h, the corresponding base body (silicone rubber tube) can be obtained. 18 By changing the shape of the mold, the base bodies with different cavity shapes will be obtained. As shown is the manufacturing process of the base body of the rotary module (Figure 3) and of the bending module (Figure 4) separately. The fabrication steps for the rotary module are as follows:
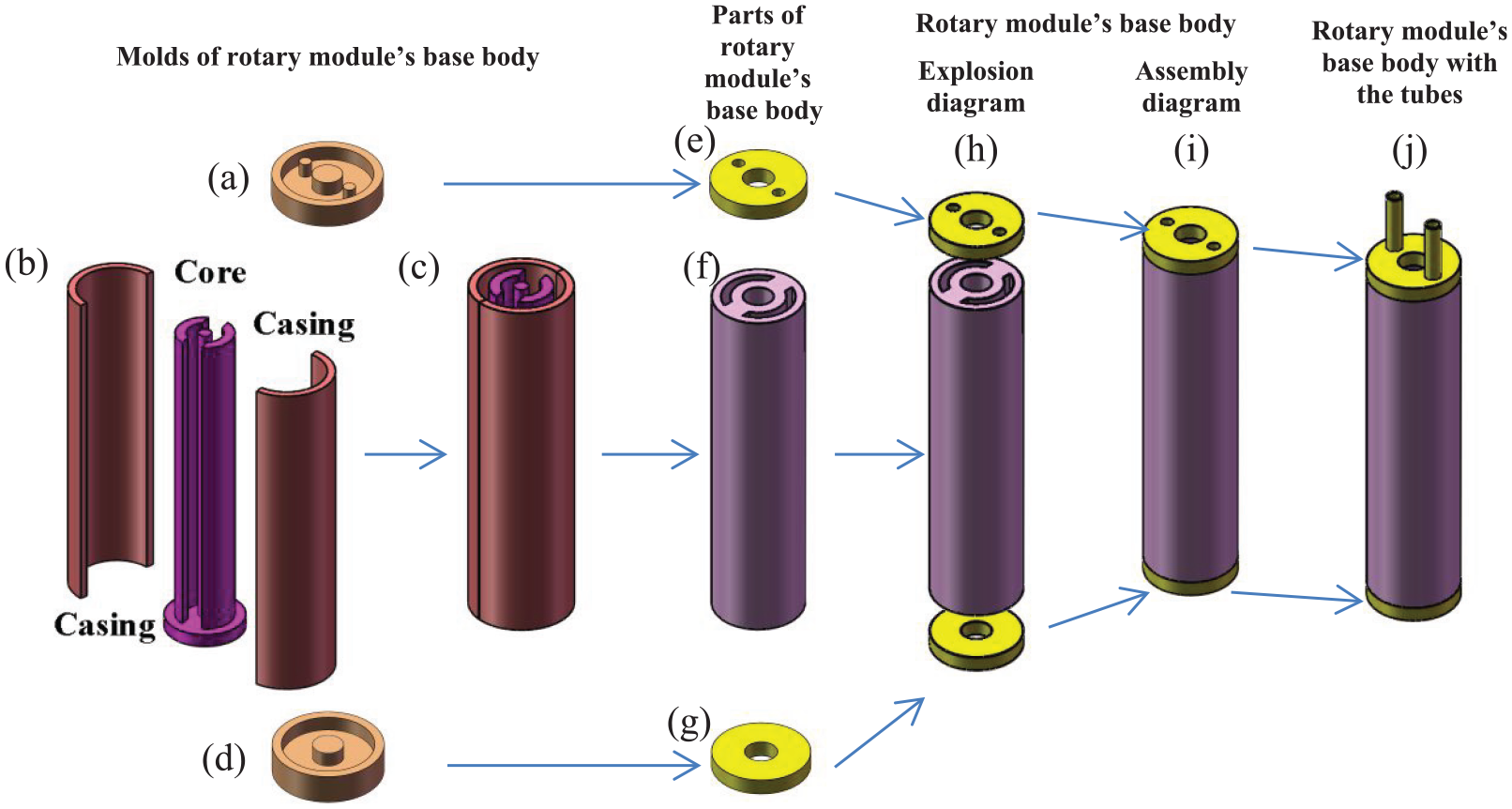
Fabrication of the rotary module’s base body: (a) the up cover mold of rotary module’s base body, (b) the open state of rotary module’s main base body mold, (c) the closed state of rotary module’s main base body mold, (d) the low cover mold of rotary module’s base body, (e) the up cover part, (f) the part of the main base body, (g) the low cover part, (h) explosion diagram of rotary module’s base body, (i) assembly diagram of rotary module’s base body, and (j) the base body of the rotary module with tubes.

Fabrication of the bending module’s base body: (a) the up cover mold of bending module’s base body, (b) the open state of bending module’s main base body mold, (c) the closed state of bending module’s main base body mold, (d) the low cover mold of bending module’s base body, (e) the up cover part, (f) the part of the main base body, (g) the low cover part, (h) explosion diagram of bending module’s base body, (i) assembly diagram of bending module’s base body, and (j) the base body of the bending module with tubes.
External reinforcement arrangement
External reinforcement fabrication
The material used for the external reinforcement is spring steel of 65Mn with a diameter of 1 mm (brand: 65Mn spring steel, brand: Angang, origin: Anhui, China), and its Young’s modulus is 197 GPa. The external reinforcement for the rotary module and the bending module is a spring and a steel hoop separately.
External reinforcement assembly
The external reinforcement is required to be assembled on the outer surface of the base body made in section 2.1.2 with an interference fit (Figure 5). The rotary module is assembled from the base body and the spring (Figure 5(a)–(c)). The bending module is assembled from the base body and the steel hoop (Figure 5(d)–(f)).
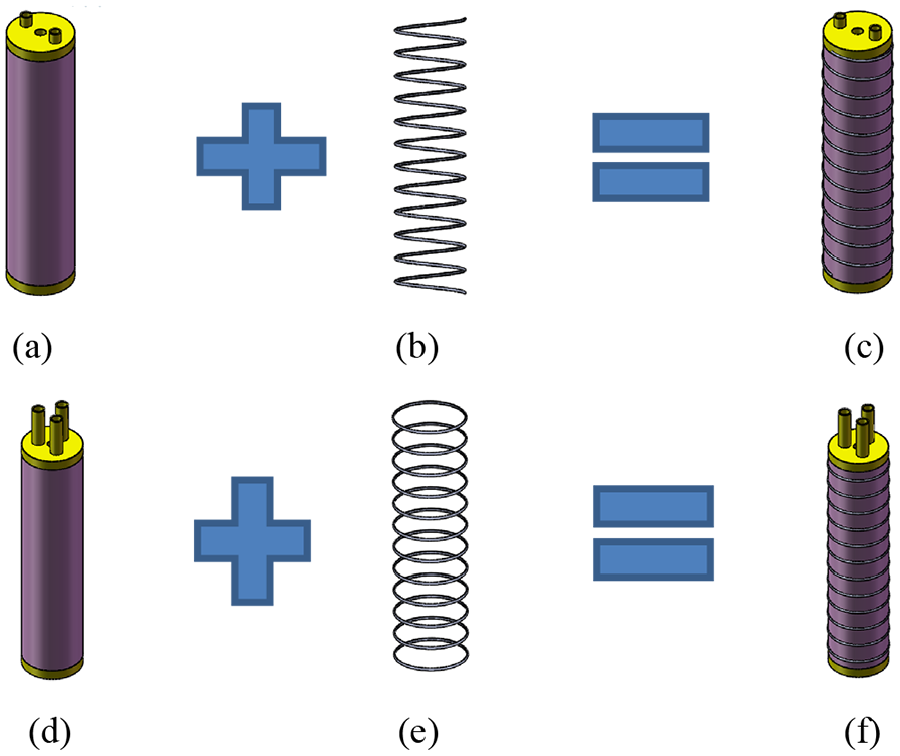
Schematic diagram of the external reinforcement assembly: (a) the base body of rotary module, (b) spring reinforcement, (c) rotary module, (d) the base body of bending module, (e) steel hoop reinforcement, and (f) bending module.
Result
This article combines the bending module and the rotary module to make the rigid-hoop-reinforced multi-DOF soft actuator. The actuator can bend and rotate in water, as shown in Figure 6. Figure 6(a) is the common bending state, when the pressure of bending module is 35 kPa and the rotary module has no pressure, the bending angle of the soft actuator is about 30°. Figure 6(b) is the large-scale bending state, when the pressure of bending module is 50 kPa and the rotary module has no pressure, the bending angle of the soft actuator is about 60°. Figure 6(c) is the coupled state of bending and rotary. When the pressure of bending module is 50 kPa and the pressure of rotary module is 30 kPa, the bending angle of the soft actuator is about 60° and the rotary angle in the inward direction through the screen is about 20°.

Action of the rigid-hoop-reinforced multi-DOF soft actuator in water: (a) common bending state, (b) large-scale bending state, and (c) coupled state of bending and rotary.
Experiment and discussion
Experimental scheme
In general, in order to match the high flexibility of the base body (silicone rubber tube), a fiber line is often used, that is, the fiber-reinforced on the base body is achieved by winding a Kevlar line on the outer surface of the base body. 15 When the base body is pressurized, it can be rotated and bent. 19 Although the fiber reinforcement can be well-matched with the base body, it also has the disadvantages of weak rigidity and poor load performance. Therefore, in our article, a rigid-hoop-reinforced Multi-DOF soft actuator was put forward to improve the bearing capacity of its rotary and bending modules. 17 Next, simulation and experimental verification of the performance and bearing capacity of the soft actuator were carried out through a series of experiments. The experimental scheme is as follows:
Performance test. Its purpose is to test the influencing factors of the rotary module and the bending module. Performance test includes: (1) The effect of reinforcement type and reinforcement interval on the rotary module; (2) The effect of reinforcement type and reinforcement interval on the bending module; (3) The coupling effect between the reinforcement and the silicone rubber base body on the rotary module; (4) The coupling effect between the reinforcement and the silicone rubber base body on the bending module.
Bearing capacity test. The purpose is to verify the improvement in the bearing capacity of the soft actuator. Bearing capacity test includes: (1) Bearing capacity test of the rotary module; (2) Bearing capacity test of the bending module.
Experimental implementation and results
Performance test
The effect of reinforcement type and reinforcement interval on the rotary module
The performance of the rotary module was compared using different reinforcement types (spring-reinforced and fiber-reinforced) and different reinforcement intervals (5, 10, 15 mm). Wherein the reinforcement interval refers to the spacing between adjacent reinforcements along the axial direction of the base body. As shown in Figure 7(a1), (a2), and (a3), the soft actuators were designed with spring-reinforced and different reinforcement intervals (5, 10, 15 mm) respectively. As shown in Figure 7(b1), (b2), and (b3), the soft actuator was designed with fiber-reinforced and different reinforcement intervals (5, 10, 15 mm) accordingly. The experiments of the effect of reinforcement type and reinforcement interval on the rotary module were performed based on its working mechanism.

Rotating module with reinforcement intervals of 5, 10, and 15 mm: (a) spring-reinforced and (b) fiber-reinforced.
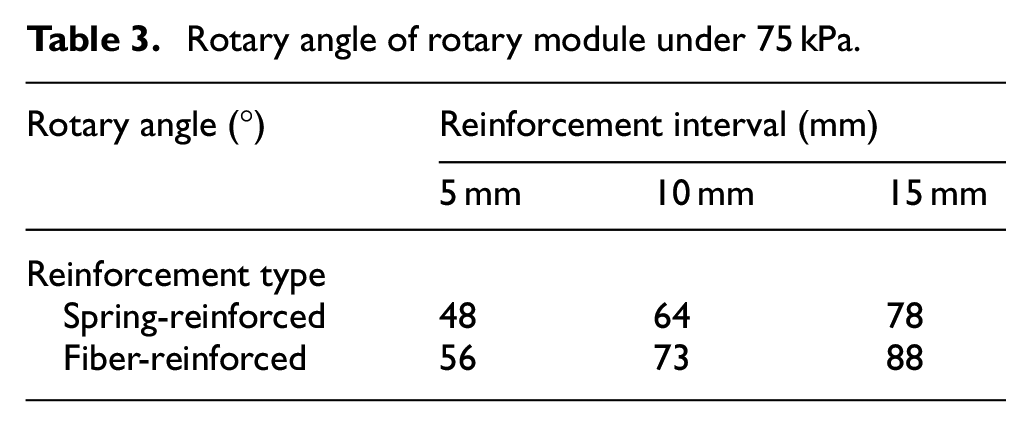
Through the above experiments, the relationship between driving air pressure and deflection angle based on the spring-reinforced or the fiber-reinforced rotary module is obtained, as shown in Figure 8 and Table 3. It can be seen that the rotation angle of the rotary module increases with the value of the air pressure; as for the same reinforcement type, the larger the reinforcement interval, the larger the rotation angle of the rotary module under the same air pressure; when the same reinforcement interval and the air pressure are applied, the spring-reinforced rotary module has a smaller rotation angle than the fiber-reinforced one.

The relationship between driving air pressure and rotary angle of the rotary module.
Rotary angle of rotary module under 75 kPa.
The effect of reinforcement type and reinforcement interval on the bending module
The performance of the bending module was compared using different reinforcement types (steel hoop-reinforced and fiber-reinforced) and different reinforcement intervals (8, 10, 15 mm). Wherein the reinforcement interval refers to the spacing between adjacent reinforcement along the axial direction of the base body. As shown in Figure 9(a1), (a2), and (a3), the soft actuators were designed with steel hoop-reinforced and different reinforcement intervals (8, 10, 15 mm) respectively; as shown in Figure 9(b1), (b2), and (b3), the soft actuator was designed with fiber-reinforced and different reinforcement intervals (8, 10, 15 mm) accordingly. The experiments of the effect of reinforcement type and reinforcement interval on the bending module were performed based on its working mechanism.

Bending module with reinforcement intervals of 8, 10, and 15 mm: (a) steel hoop-reinforced and (b) fiber-reinforced.
Through the above experiments, the relationship between driving air pressure and bending angle based on the steel hoop-reinforced or the fiber-reinforced rotary module is obtained, as shown in Figure 10 and Table 4. It can be seen that the bending angle of the bending module increases with the value of the air pressure; when with the same reinforced type, the curve of the bending module pressure and bending angle is closer to linear using the reinforced interval of 10 mm than of 8 and 15 mm. Therefore, the bending module with the reinforced interval of 10 mm has the best bending characteristics, and the bending angle changes more gently with the air pressure; when with the same reinforced interval and the air pressure, the bending angle of the bending module with the steel hoop-reinforced is smaller than that with the fiber-reinforced; and when the value of the filling pressure is in the range of 0–30 kPa, the reinforcement interval and the reinforced type may have less influence on the bending angle of the bending module.

The relationship between driving air pressure and bending angle of the bending module.
Rotation angle of bending module under 50 kPa.

The coupling effect between the reinforcment and the silicone rubber base body on the rotary module
A comparison experiment was carried out on a rotary module composed of the spring-reinforced interval of 10 mm and the base body (silicone rubber tubes) with different hardness,
20
and the simulation was performed using Abaqus 6.14 to verify the experimental results. The experiments of the coupling effect between the reinforcement and the silicone rubber base body on the rotary module were performed based on the working mechanism of the rotary module. Abaqus software has a superelastic constitutive equation, so in this paper, the constitutive model of Yeoh is used to characterize the performance of silicone rubber, and a second-order mixed solid tetrahedral element is used to simulate silicone rubber. Since the simulation of silicone rubber using Abaqus requires obtaining the material coefficient of the constitutive model of Yeoh firstly, the calculation of the performance parameters of the silicone rubber will be done as follows. The mechanical properties of the silicone rubber are usually described by different forms of strain energy density function

Where,


The strain energy density function of the second-order Yeoh model

Substituting equations (2) and (3) into equation (4), you can get

Where
Material coefficient of silicone rubber.

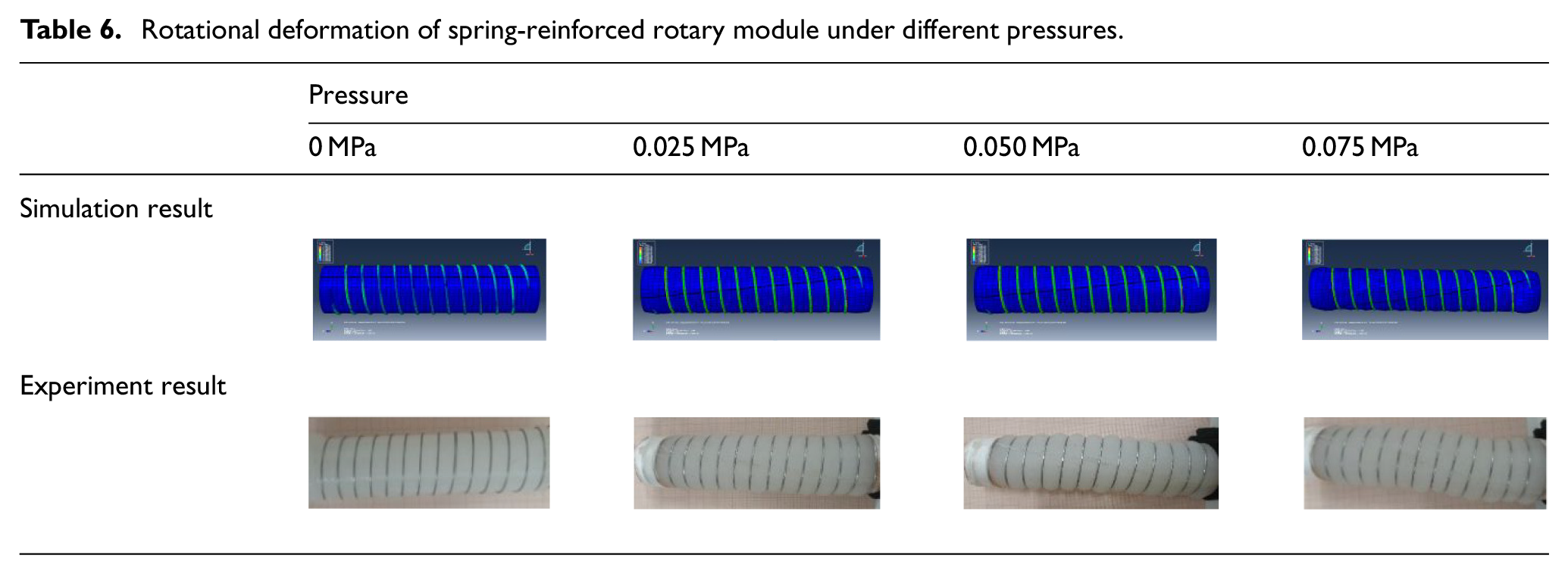
Through the simulation and the experiment, the effect on the performance of the spring- reinforced rotary module is obtained with the reinforced interval of 10 mm. 23 Table 6 is the rotational deformation diagram of the spring-reinforced rotary module under different pressures of the softer silicone rubber material (silica gel A:silica gel B:Dimethyl silicone oil = 1:1:0.3). And the rotational deformation diagram of the harder silicone rubber material (silica gel A:silica gel B:Dimethyl silicone oil = 1:1: 0) is similar. Figure 11 is the comparison of the deflection experiment and simulation analysis results of the rotary module using silicone rubber materials with different hardness. It can be seen that the rotary angle of the rotary module increases with the air pressure; as for the rotary angle of the rotary module, the simulation result is slightly smaller than the experimental value, however, the trend of the relationship between rotary angle and air pressure obtained by simulation and experiment is qualitatively consistent; with the same air pressure, the rotary module made of soft material can achieve a larger rotating angle, so the performance of the rotary module made of soft material may be better.
Rotational deformation of spring-reinforced rotary module under different pressures.

Comparison of the deflection experiment and simulation analysis results of the rotary module.
The coupling effect between the reinforcement and the silicone rubber base body on the bending module
The comparison experiment was carried out on a bending module composed of steel hoop-reinforced interval of 10 mm and the base body (silicone rubber tubes) with different hardness, and the simulation was performed using Abaqus 6.14 to verify the experimental results. According to the section of 2.1.2, the base bodies with different hardness can be prepared. The experiments of the coupling effect between the reinforcement and the silicone rubber base body on the bending module were performed based on the working mechanism of the bending module.
Through the simulation and the experiment, the effect on the performance of the steel hoop-reinforced bending module is obtained with the reinforced interval of 10 mm. 24 Table 7 is the bending deformation diagram of a steel hoop-reinforced bending module under different pressures of the softer silicone rubber material (silica gel A:silica gel B:Dimethyl silicone oil = 1:1:0.3). And the bending deformation diagram of the harder silicone rubber material (silica gel A:silica gel B:Dimethyl silicone oil = 1:1:0) is similar. Figure 11 is the comparison of the bending test and simulation analysis results of the bending module using silicone rubber materials with different hardness. It can be seen that the bending angle of the rotary module increase with the air pressure value; as for the bending angle of the bending module, the simulation result is slightly smaller than the experimental value; however, the trend of the relationship between bending angle and air pressure obtained by the simulation and the experiment is basically consistent; as the pressure value becomes larger, the numerical difference between simulation and experiment also increases gradually, due to the silicone rubber’s high degree of nonlinear characteristics at a large strain. Therefore, the optimum working pressure of the bending module is within 60 kPa (the black dotted line in Figure 12); with the same air pressure, the bending module made of soft material can achieve a larger rotating angle, so the performance of the bending module made of soft material may be better.
Bending deformation of steel hoop-reinforced bending module under different pressures.


Comparison of bending test and simulation analysis results of bending module.
Comparison with another types of soft actuator
Qualitative comparison
As shown in Table 8, rigid-hoop-reinforced multi-DOF soft actuator is compared with another types of soft actuator. In the first column, the fold structure proposed by Gong of Beihang University in 2016 can avoid the expansion of the arm and just only make the bending motion. 12 In the second column, the bending and rotary motions can be achieved by the Fiber-reinforced structure by Kurumaya of Tokyo Institute of Technology in 2018, however the diameter is large. 15 In the third column is our scheme in this paper, the soft actuator not only realize both the bending and rotary motions, but also the diameter of soft actuator is as small as 3D-motion soft robotic arm.
Comparison with another types of soft actuator.

Quantitative comparison
From the section of 2.2.1, we can draw a conclusion that the bending and rotary actions can be achieved by two methods (Modular soft robotic wrist 15 and Rigid-hoop-reinforced multi-DOF soft actuator (this paper)). Furthermore, we conduct quantitative experiments in order to verify the superiority of our scheme in bearing capacity. We first made the Rigid-hoop-reinforced multi-DOF soft actuator by our scheme. Then, according to the method of Modular Soft Robotic Wrist, 15 we made the Fiber-reinforced actuator with same dimension. The detailed tests for the bearing capacity of the rotary module and bending module can be seen in the sections of 2.2.2.1 and 2.2.2.2 respectively.
Bearing capacity test of the rotary module.
Through the experiment, the effect on the bearing capacity of the rotary module is obtained with the reinforced interval of 10 mm. 24 The bearing capacity test 12 was carried out by the pressure testing machine (brand: Zhiqu, model: ZQ-21A-2, origin: Dongguan, China). The bearing capacities in the radial and axial directions for the rotary module are both be considered. The test of the bearing capacity in the radial direction for the rotary module in the initial state (barometric pressure value is 0); and the test of the bearing capacity in the radial direction for the rotary module in the inflated state (the air pressure value is 70 kPa, the rotation angle is 60°). The bearing capacity test of the rotary module is performed based on the working mechanism of the rotary module.25,26
Through the above experiments, the test result of the bearing capacity in the radial direction for a rotary module in the initial state can be seen in Figure 13; the test result of the bearing capacity in the axial direction for the rotary module in the inflated state can be seen in Figure 14. Detailed data is shown in Table 9.

Rotary module’s radial performance results in initial state.
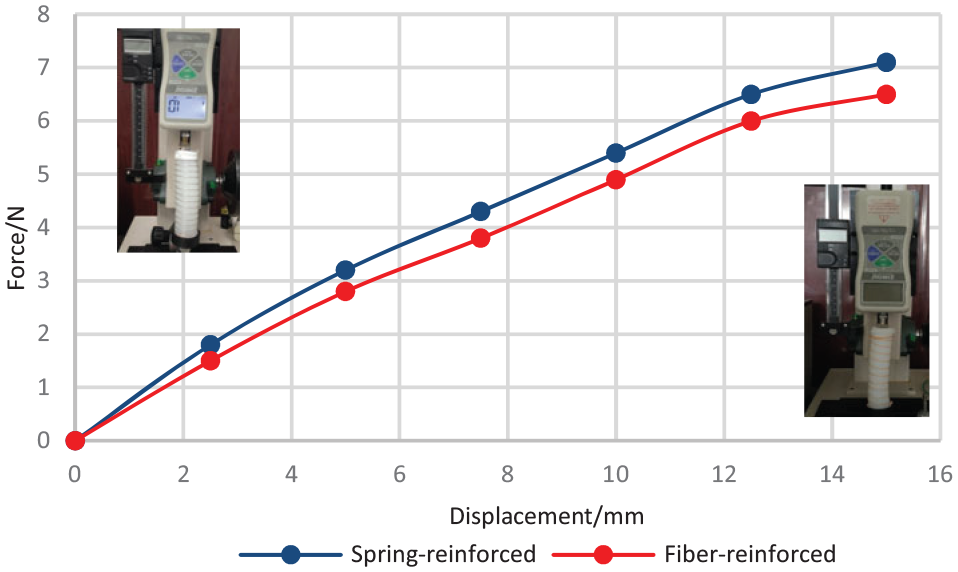
Rotary module’s axial performance results in inflated state.
The data of the bearing capacity of the rotary module.

It can be seen that in the initial state, if it is to produce the same radial displacement, the spring-reinforced rotary module needs to apply a larger force than the rotary module with fiber-reinforced 15 ; and when the applied force increases, the radial displacement also increases accordingly; in the inflated state, if it is to produce the same axial displacement, the spring-reinforced rotary module needs to apply a larger force than the rotary module with fiber-reinforced 15 ; and when the applied force increases, the axial displacement also increases accordingly. According to Table 8, compared with the fiber-reinforced rotary module, 15 the spring-reinforced rotary module can increase the radial bearing capacity by 29.6% and the axial bearing capacity by 28.2%.
Bearing capacity test of the bending modules.
Through the simulation and the experiment, the effect on the bearing capacity of the bending module is obtained with the reinforced interval of 10 mm. 24 The bearing capacities in the radial and axial directions for the bending module are both be considered. The test of the bearing capacity in the radial direction for the bending module in the initial state (barometric pressure value is 0); and the test of the bearing capacity in the radial direction for the bending module in the inflated state (the bending angle is 60°). The bearing capacity test of the bending module is performed based on the working mechanism of the bending module. The same displacement is applied in the axial and radial directions, respectively, and the resistance is measured. The resistance value represents the strength of the bearing capacity.
Through the above experiments, the result of the bearing capacity test in the radial direction for the bending module in the initial state can be seen in Figure 15; the test result of the bearing capacity in the axial direction for the bending module in the inflated state can be seen in Figure 16. Detailed data is shown in Table 10. It can be seen that in the initial state, if it is to produce the same radial displacement, the steel hoop-reinforced bending module needs to apply a larger force than the bending module with fiber-reinforced 15 ; and when the applied force increases, the radial displacement also increases accordingly; in the inflated state, if it is to produce the same axial displacement, the steel hoop-reinforced bending module needs to apply a larger force than the bending module with fiber-reinforced 15 ; and when the applied force increases, the axial displacement also increases accordingly. According to Table 10, compared with the fiber- reinforced 15 rotary module, the steel hoop-reinforced bending module can increase the radial bearing capacity by 30.6% and the axial bearing capacity by 49.6%.

Bending module’s radial performance results in initial state.

Bending module’s axial performance results in inflated state.
The data of the bearing capacity of the bending module.

Conclusion
Traditional soft actuators are equipped with fibers on the silicone rubber base body. Although with high flexibility, they have the disadvantages of low overall stiffness and weak load-bearing capacity. In order to improve the bearing capacity, this article presents the development of a rigid-hoop-reinforced (spring or steel hoop) multi-DOF soft actuator and the research on its performance. In this paper, the structure design, fabrication method and process of the rigid-hoop-reinforced multi-DOF soft actuator are introduced in detail. The influencing factors of rotary module and bending module (reinforcement type, reinforcement interval, coupling effect between the reinforcment and the silicone rubber base body) are simulated and verified by four groups of experiments. And the bearing capacities of rotary module and bending module are tested. In addition, a prototype of the rigid-hoop-reinforced multi-DOF soft actuator was made.
Through the research, the following conclusions are drawn:
The lower the hardness of silicone rubber base body, the better the adaptability and flexibility of the actuator; and the higher the hardness, the greater the rigidity and bearing capacity of the actuator.
Under the same driving pressure, the spring-reinforced interval increases the maximum rotary angle of the rotary module and the steel hoop-reinforced interval increases the maximum bending angle of the bending module.
Compared with fiber-reinforced actuators, the bearing capacities of rigid-hoop-reinforced actuators made of 65Mn spring steel are improved. The radial and axial bearing capacity of the bending module and the rotary module are raised by 29.6%,28.2%,30.6%,49.6% separately.
In the future research, the authors will further study the grasping of underwater flexible manipulator, and cooperate with sensors to achieve more accurate action 27 . Such as the fuzzy self-tuning PID controller is systematically developed so as to achieve dynamic performance targets of the actuator25,28. We will carry out corresponding research on this basis.
Footnotes
Handling editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by National Natural Science Foundation of China (No. 51475409), Jiangsu Province Industry University research cooperation Program Funds (No. BY2020663), Yangzhou City – Yangzhou University of Science and Technology Cooperation Program Funds (No. YZ2020166).