
Abstract
Due to the manufacturing and assembly errors of the spiral bevel gear, the deviations between the measured tooth surface and its theoretical tooth surface will affect the measurement results of the tooth surface. After analyzing the tooth surface deviation of spiral bevel gear, this paper provided a compensation method to compensate the eccentricity and inclination errors by the registration of the theoretical and measured tooth surface. An improved iterative closest point (ICP) algorithm for the registration of the tooth surface was provided. The distance between the point in measured tooth surface and the nearest point in theoretical tooth surface is used to replace the minimum Euclidean distance, and the damping Gauss-Newton method is used to solve the geometric transformation matrix. Simulation experiments were carried out to verify the proposed compensation method. The compensation effect is over 93% for the concave tooth surface and over 89% for the convex tooth surface of the spiral bevel gear. The results also show that the improved ICP algorithm could compensate the eccentricity and inclination errors of the spiral bevel gear more precisely than the basic ICP algorithm.
Introduction
Spiral bevel gear is one of the key basic components in mechanical equipment. It has the advantages of large coincidence, high bearing capacity, stable transmission, high transmission efficiency, long service life, and low noise, which makes it an indispensable part of many mechanical equipment. It is widely used in automobile, shipbuilding, aerospace, and other fields.1–5
Because of the manufacturing and assembly errors, there has the deviations between the measured tooth surface and the theoretical tooth surface of gear, especially for the eccentricity and inclination errors.6,7 These deviations have a great impact on the normal operation of the gears, and need to be compensated. To compensate the deviations of spiral bevel gear tooth surface, first of all, the precision registration method should be researched for the measured and theoretical tooth surface of the gear.
Many works have been done on the measurement error and its compensation method of the tooth surface of spiral bevel gear, such as coordinate measurement method8–12 and tooth contact analysis method.13–17 Fuentes-Aznar and Guo proposed a numerical-analytical approach for the alignment errors of face-gears, and compensated the errors by adjusting the position of the shaper cutter to replicate the relative position of the pinion in misaligned condition.18,19 Based on the geometric equivalent relationship, Tang and Lei investigated the initial selection and determination in error tooth contact analysis of spiral bevel gear, and then used the iterative method to calculate the initial mesh-point. 20 When researched numerical loaded tooth contact analysis and its innovative semi-analytical determination approach, Qu et al. established the model in considerations of the accurate contact point matching. 21 Liu et al. using the quasi-static loaded tooth contact analysis to discuss the contact characteristic and gear geometry with the radial and angular eccentric errors that caused by work holding equipment, and the influence of radial eccentricity error and angular eccentricity error on gear machining dimension is studied. 22 Takeda et al. provided a compensation method for the tooth flank measurement error of hypoid gear by matching the theoretical and the measured tooth surface, but this method only focuses on the Z-axis. 23 Integrating ICP and BFGS algorithm, Xie et al. used a NURBS method to reconstruct the surface of the bevel gear and researched the error by initially matched and precisely matched of the gear surface. 24
Many works also have been done on ICP and improved ICP method. Feng et al. proposed a registration approaches via ICP algorithm to achieve a best-fit position between two point clouds in the remanufacturing repair of damaged parts. 25 Li et al. evaluated the validity, robustness, accuracy, and efficiency by compared the point-to-point and point-to-plane ICP algorithm. 26 Chen et al. propose a new approach with the multi-sensor data fusion for the measurement, registration, and reconstruction of large workpieces with freeform surfaces. 27 Yang et al. proposed a new autofocusing algorithm based on the object image and registration technology when measuring the form deviation of the helical tooth flank with laser interferometry. 28 Wu et al. proposed a novel fast symbolic solution that can directly solve the eigenvalue and its associated eigenvector. 29 Zheng et al. presented a new repair strategy for damaged turbine blades through improved ICP rigid registration algorithm. 30 Wu et al. used ICP algorithm to determine the relationship between the measuring points and the theoretical model when repairing the aero-engine blade. 31 Kurobe et al. proposed a point cloud registration system based on deep learning, and the system could integrate more useful information than conventional approaches. 32 By the consideration of new discrete curvature parameters, Rantoson et al. proposed a registration technique, and a new variant of ICP algorithm is used to reduce registration error. 33 Bergstrom et al. proposed a distance varying grid tree structure for on-line use, and the involved registration problem is solved by ICP algorithm. 34
However, few researches have been done on the compensation method of the eccentricity and inclination errors by the registration for spiral bevel gear tooth surface.
In this paper, to compensate the eccentricity and inclination errors of the spiral bevel gear, the precision registration algorithm between the measured tooth surface and the theoretical tooth surface of spiral bevel gear is studied. According to the characteristic of the tooth surface deviation, an improved ICP algorithm was proposed. Simulation experiments were done to verify the compensation method, and the results show that the algorithm is useful for the precision compensation of the eccentricity and inclination errors.
Analysis of tooth surface deviation of spiral bevel gear
The tooth surface of spiral bevel gear is a complex curved surface. At present, using gear measuring machine, it is very difficult to measure the tooth surface continuously. Generally, several discrete points with uniform distribution on the tooth surface are selected for measurement. The selected discrete points should be distributed over the entire tooth surface as evenly as possible, to make the measurement results reflect the overall profile information of the measured tooth surface.
In the measurement process, due to the manufacturing and assembly errors of the spiral bevel gear, such as the eccentricity error of the gear rotary shaft in the manufacturing process, the non-parallelism between the rotary shaft of the gear and the vertical axis of the measuring machine, and the plane error of the outer end surface (the axial reference surface) of the spiral bevel gear that exists in the milling process, the actual common apex of the spiral bevel gear deviates from its theoretical common apex, resulting in the eccentricity, and inclination error of the rotary shaft of the spiral bevel gear, as shown in Figure 1.

The eccentricity and inclination errors of the gear.
The eccentricity and inclination error will cause the inconsistency between the measured tooth surface and the theoretical tooth surface, and will furthermore have great impact on the measurement results of tooth profile, tooth trace and tooth pitch of the tooth surface.
In order to reduce or even eliminate the eccentricity and inclination errors in the measurement results, it is necessary to do the registration process precisely between the measured tooth surface and its theoretical tooth surface.
Precision registration algorithm of measured and theoretical tooth surface
Basic ICP algorithm
When two related curve surfaces registration, one of the two surfaces should be transformed geometrically, and the two surfaces meet the best registration criteria after transformation. The process of registration is the process of searching the geometric transformation matrix.
The ICP algorithm is an iterative optimization algorithm based on the least square method. It repeats the process of calculating the geometric transformation matrix to updating the relationship between two groups of surface data, until it meets the best registration criteria.
Two groups of surface data are named by points set
In the kth iteration, the geometric transformation of the target point set is carried out to obtain the point set P k by equation (1).

Then the points Qi in the points set Q which have the minimum Euclidean distance Ed to the points Pi in P k are searched to form the point set Q k . The Euclidean distance is calculated by equation (2).

The geometric transformation matrix Mk between the point set P and Q k is calculated by the quaternion method, and the original geometric transformation matrix is updated according to Mk.
When the objective function E(k) shown in equation (3) reaches the minimum or the number of iterations is over the maximum number kmax, the iteration stops. The geometric transformation matrix Mk is the optimal registration matrix for accurate registration of the target point set and the reference point set, as shown in Figure 2.


The flowchart of basic ICP algorithm.
Improved ICP algorithm for gear tooth surface
In the basic ICP algorithm, the Euclidean distance from the point in target surface to the point in reference surface is used to establish the corresponding relationship between two groups of surface data. This may produce a certain number of wrong correspondences, and have poor robustness. In addition, the basic ICP algorithm uses the quaternion method to solve the geometric transformation matrix, and its convergence rate is slow.
Based on the basic ICP algorithm, this paper takes the measured tooth surface as the target surface and the theoretical tooth surface as the reference surface. The following two aspects are improved to make the algorithm more effective for the precision registration of the tooth surfaces of spiral bevel gear.
First, combining with the definition of the tooth surface deviation of spiral bevel gear, the distance between the point Pi in the measured tooth surface (target surface) and the nearest point

Relationship between points Pi and
If the point

After determined the position of the point

Second, the iterative nonlinear optimization method is used to replace the quaternion method in basic ICP algorithm, and the damping Gauss-Newton method is used to solve the geometric transformation matrix, so that the convergence rate of the global optimal solution is better than that of the basic ICP algorithm.
The principle of the best registration of two tooth surfaces is that the square sum of the deviation between the measured tooth surface point and the theoretical tooth surface reaches minimum, as shown in equation (6).

As the deviations between the measured tooth surface and its theoretical tooth surface is too small, and the selected initial point is considered near the optimal solution, so the damping Gauss-Newton method is suitable to solve the geometric transformation matrix.
The one-dimensional optimization that involved in the algorithm will be solved by combining the advance and retreat method with the golden section method.
The flow chart of the precision registration algorithm between the measured tooth surface and its theoretical tooth surface is shown in Figure 4. The geometric transformation matrix Mk is the optimal registration matrix for accurate registration of the measured and theoretical tooth surface.

The flow chart of the improved ICP registration algorithm.
After calculated the optimal registration matrix Mk, the compensation results of the eccentricity and inclination errors in the measurement results of the tooth surface could also be calculated. The measured tooth surface P′ after compensation could be expressed by equation (7).

Simulation experiments and analysis
According to the measuring process of the spiral bevel gear tooth surface by the coordinate measuring machine, the assumption measured deviation of the tooth surface are randomly generated based on the point coordinates and unit normal vector of the theoretical tooth surface, then the geometric transformation of the theoretical tooth surface is carried out, and the tooth surface after transformation is taken as the measured tooth surface. The measured tooth surface and the theoretical tooth surface are used for the registration by the proposed method. The compensation results for eccentricity and inclination errors are calculated from the geometric transformation matrix.
The basic parameters of the spiral bevel gear are shown in Table 1.
The basic parameters of the spiral bevel gear.

In the simulation experiment, the theoretical tooth surface has 5 × 7 points, and 10 experiments are carried out for the convex and concave tooth surface. In each experiment, a group of deviations d ij are generated randomly within the value range of measured gear deviation. The measured tooth surface could be calculated by equation (8).

Figure 5 shows the theoretical concave tooth surface and the generated measured tooth surface of the spiral bevel gear.

Theoretical and measured tooth surface of the spiral bevel gear.
Experimental results of concave tooth surface
Five groups of randomly generated deviations of concave tooth surfaces are shown in Figure 6, and the corresponding measured tooth surfaces can be calculated by equation (4).

Randomly generated deviations of gear concave tooth surface.
After registration by the proposed method, six parameters of the transformation matrix are obtained, and then the compensation value of the deviations between the theoretical and measured tooth surface after registration could be calculated. The five groups of deviations after compensation by the improved ICP algorithm are shown in Figure 7.

Deviations of concave tooth surface after compensation by improved ICP algorithm.
Table 2 shows the average deviations of the concave tooth surface before and after compensation by the basic ICP algorithm and the improved ICP algorithm, respectively.
Comparison of average deviations before and after compensation by basic ICP and improved ICP (Concave tooth surface).
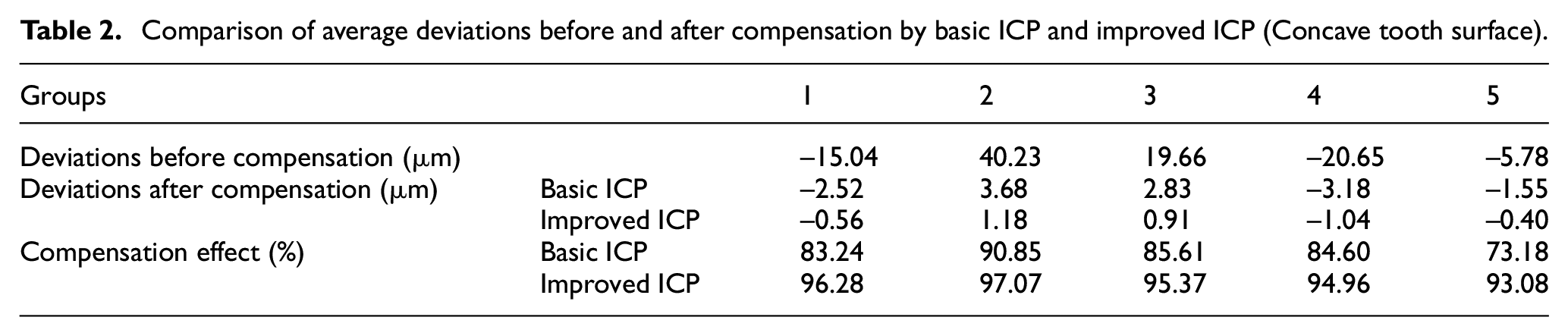
From Figures 6 and 7 and Table 2, it can be seen that the deviations between the theoretical and measured tooth surface reduced obviously after compensation by the basic and the improved ICP algorithm. The deviations after compensated by the basic ICP algorithm remains more than 1.55 μm, and more than 73% deviations can be compensated by this method. In comparison, there are less than 1.18 μm remains after compensated by the proposed ICP algorithm, and more than 93% deviations are compensated by the improved ICP algorithm. Compared with the basic ICP algorithm, the improved ICP algorithm has higher compensation effect, and it means that the improved ICP algorithm is more suitable to compensate the eccentricity and inclination errors of the tooth surface.
Experimental results of convex tooth surface
Five groups of randomly generated deviations of convex tooth surfaces are shown in Figure 8.

Randomly generated deviations of gear convex tooth surface.
After compensation by the improved ICP algorithm, the deviations of the convex tooth surface are shown in Figure 9.

Deviations of the convex tooth surface after compensation by improved ICP algorithm.
Table 3 shows the average deviations of the convex tooth surface before and after compensation by the basic ICP algorithm and the improved ICP algorithm respectively.
Comparison of average deviations before and after compensation by basic ICP and improved ICP (Convex tooth surface).

From Figures 8 and 9 and Table 3, it can be easily seen that the deviations are more than 1.52 μm after compensated by the basic ICP algorithm, and the compensation effect is over 77%. The deviations are less than 1.35 μm after compensated by the proposed improved ICP algorithm, and more than 89% deviations are compensated by the improved ICP algorithm. It also verified that the improved ICP algorithm is more effective than the basic ICP algorithm to compensate the deviations of the tooth surface.
Conclusions
According to the measurement theory of spiral bevel gear tooth surface, this paper designs a precise compensation algorithm for the eccentricity and inclination errors of the tooth surface. The proposed algorithm is on the basis of the ICP algorithm, and the distance between the point in the measured tooth surface and the nearest point in the theoretical tooth surface is used to replace the minimum Euclidean distance, the iterative nonlinear optimization method is used to replace the quaternion method, and the damping Gauss-Newton method is used to solve the geometric transformation matrix.
This paper has done some simulation experiments to verify the improved ICP algorithm. The measured tooth surface was generated from the theoretical tooth surface by some groups of random deviations. Then the proposed method was used for the compensation experiments. The experiment results show that the compensation effect is over 93% for the concave tooth surface and over 89% for the convex tooth surface of the spiral bevel gear. The results also show that the improved ICP algorithm is more useful for the precisely compensation for the eccentricity and inclination errors of the tooth surface.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by Natural Science Foundation of Shaanxi Province (Grant No. 2019JQ-556), in part by the Open Research Project of Key Laboratory of Advanced Manufacture Technology for Automobile Parts (Chongqing University of Technology), MOE (Grant No. 2017KLMT06), in part by the Major Science and Technology Projects of Shaanxi Province (Grant No. 2018zdzx01-01-01), and in part by the Fundamental Research Funds for the Central Universities, CHD (Grant No. 300102250111).