
Abstract
Localizing small damages often requires sensors be mounted in the proximity of damage to obtain high Signal-to-Noise Ratio in system frequency response to input excitation. The proximity requirement limits the applicability of existing schemes for low-severity damage detection as an estimate of damage location may not be known a priori. In this work it is shown that spatial locality is not a fundamental impediment; multiple small damages can still be detected with high accuracy provided that the frequency range beyond the first five natural frequencies is utilized in the Frequency response functions (FRF) curvature method. The proposed method presented in this paper applies sensitivity analysis to systematically unearth frequency ranges capable of elevating damage index peak at correct damage locations. It is a baseline-free method that employs a smoothing polynomial to emulate reference curvatures for the undamaged structure. Numerical simulation of steel-beam shows that small multiple damages of severity as low as 5% can be reliably detected by including frequency range covering 5–10th natural frequencies. The efficacy of the scheme is also experimentally validated for the same beam. It is also found that a simple noise filtration scheme such as a Gaussian moving average filter can adequately remove false peaks from the damage index profile.
Keywords
Introduction
Structural health monitoring (SHM) utilizes vibrational characteristics of the structure for damage detection. These characteristics are described by modal parameters such as natural frequency, mode shapes, modal curvature and modal strain energy. The damage is indicated by precise measurement of the slight deviations in modal parameters values with reference to their nominal range for an ideal healthy structure. This change in modal parameters is often attributed to stiffness loss which indicates the damage along with its location and severity. Unfortunately, these parameters usually exhibit only a minor deviation which limit the application to severe damages only. 1 Consequently, early stage damages, typically less severe in nature, would go undetected in several real-life scenarios.
Among the most effective and reliable schemes of localizing structural damages, the FRF curvature method is known for circumventing above modal parameters constraints as well as addressing limitations of SHM experimental setup such as sensor noise and unmodeled disturbances. Vast majority of prior studies utilized FRF curvature method employed the knowledge of reference curvature shapes of the undamaged structure. However, such baseline information may not be available in practice, which limit the scope of these studies. In addition, sensor noise introduces further uncertainty in damage location if we obtain curvatures using only lower natural frequencies in the FRF. Such inaccuracy is far more pronounced in case of multiple-damage scenarios naturally prone to false positives indicators of damage locations. Placing sensor closer to the damage location can help mitigate the impact of noise by boosting signal to noise ratio, however, doing so would require somewhat unrealistic presumption that damage likelihood profile is known a priori. These problems call for damage detection method capable of sensing multiple and low severity damages in the presence of noisy FRF.
To overcome these limitations, a baseline-free FRF curvature method is presented which can locate single as well as multiple damages of various level severities in the beam. The method fits third-degree smoothing polynomial to noisy FRF to generate sanitized FRF providing cleaner reference curvatures. However, the main contribution of this work lies in systematic exploration of high frequency region of FRF usually ignored in prior studies. Even though such region has lower power spectrum density, its low signal-to-noise ratio can be compensated for by measuring FRF at more responsive segments of the beam. These were identified by the sensitivity analysis for four different set of frequencies. The results show that high natural frequencies can significantly attenuate false damage-index peaks for low-severity and multiple damage scenarios. Once false peaks are removed, basic filtration scheme such as Gaussian-weighted moving average filter can raise correct damage-index peak above noise floor.
Literature review
Earlier studies and results are founded on utilizing mode shapes and their curvatures to detect and localize damage2–5 using damage index metric computed with the help of double derivative of displacement mode shape. The approach indirectly approximates curvature of the mode shape and becomes susceptible to amplification of approximation error resulting from differentiation applied twice. Several prior studies6,7 have proposed statistical techniques to suppress these errors and elevate damage index peak. Alternatively, curvature errors can be avoided by utilizing strain mode shapes for damage detection in beams and plate-type structures.8,9 Yet, the requirement of mode shape data of the healthy structure for comparison with that of damaged structure, makes these schemes dependent on baseline information. Some researchers have used model updating methods based on iterative process or drawn a comparison with a numerical model and acquired better identification by considering more number of nodes.10–12 However, it entails very accurate model to generate meaningfully precise results. To overcome this problem, researchers investigated ways of making traditional methods baseline-free. An instantaneous baseline measurement was introduced to detect single damage in the form of removable putty, corrosion, and a cut in a square plate. 13 The pitch-catch Lamb wave propagation was used to acquire undamaged sensor-actuator path information that served as baseline measurement. Similarly, an ultrasonic response measured at one particular point on a structure was compared with the responses at other adjacent points to detect damage without using baseline data. 14 The method was able to detect single crack in an aluminum plate, delamination, and de-bonding in a glass fiber reinforced polymer (GFRP) by using laser scanner vibrometer. The data extraction was further improved by employing 3D laser scanner vibrometer that captured transient 3D displacements and velocities. 15 Although laser scanner vibrometer provides high spatial data with comparatively better accuracy but the data extraction process is quite time consuming even for smaller structures. That is why it is often not feasible to be used for large structures.
Although several traditional baseline-free methods successfully detected single damage, their efficacy is compromised when reused for multiple damages especially for low severities. A study was carried out by comparing residual sum of squares of each solution of vibration response and the assumed number of cracks in a beam. 16 The study successfully localized the multiple cracks of 20% and 30% severity, however, the proposed method being reliant on iterative numerical solution, proved sensitive to initial estimate of crack location. Another way of achieving baseline-free detection was the application of polynomial-fitting to generate smoothed data. This concept was applied in the form of multi-segment function-fitting to generate actual deflection influence line (DIL) of a damaged beam. 17 The damage was indicated by calculating the difference between actual DIL and a constructed function. In the similar manner, a smoothing polynomial called Gapped smoothing polynomial, was fitted to the curvature mode shapes to generate damage index. 18 The same concept has been used to detect multiple cracks up to 10% severity in beams. 19 The main aim in these methods is to get a smoothed data that can be used as a reference, representing data from healthy structure. The squared difference of the smoothed curvature and measured curvature yields a damage index, the peak values of which indicate the damage location/s. As this method is based on curvature mode shapes, thus it also has the same limitations associated with the approximations to obtain curvatures. It works well on noise-free data, but its effectiveness varies with the noise in the measured data. Another important consideration lies in mitigating the effect of noise and disturbances.
To overcome the problem of noise and to exploit the benefits of curvature mode shapes, a noise suppression method was used to reduce the effects of noise in the damage indices generated from Gapped smoothing method (GSM). 6 The research also highlighted the significance of resampling the data in case of less severe damage. The same approach of noise suppression was used by employing Gaussian Kernel on FRFs obtained from beam structure. 20 Recently, Gharehbaghi et al. 21 used digital filters such as Finite-duration impulse response (FIR) and Infinite-duration impulse response (IIR) filters to eliminate noise from the recorded acceleration time histories. These filters can successfully eliminate noise from the specific portion of the response signal which is more contaminated with noise. 21 In another study, the curvature mode shapes were improved by using a synergy of wavelet transform (WT) and Teager energy operator (TEO). 22 From the simulated analysis, the proposed approach was able to detect three cracks with severity of 20%, 25%, and 30% in a steel beam. These results indicated that the higher modes provided good detection as compared to lower modes at same noise level. The higher modes such as fifth and seventh modes were used to generate TEO-WT curvature mode shapes which illustrated peaks at the three crack locations along with some smaller false peaks.
The accuracy of the curvatures is based on the quality of extracted mode shapes. These fundamental mode shapes are usually extracted from FRFs at the natural frequencies of the structure and thus, the extraction process also incurs some errors which are enhanced in the curvature mode shapes. Hence, to avoid this process FRFs and their curvatures can be used directly to detect structural damage. FRF curvature method has been used to detect single damage in a beam-type structure numerically and validated experimentally on a bridge. 23 The damage was indicated by comparing the FRFs of both undamaged and damaged structure. The FRF curvature method relies on the frequency range considered to calculate the damage index. This study found the range of first anti-resonance in the FRFs to be more effective than any wider range of frequencies. However, on the contrary the findings of another study indicated the broadband range of FRF curvature be more effective to detect single small sized damage in beam. 24 The broadband range spanned to include 15 natural frequencies of the beam. As discussed above that the chosen frequency range is important in the FRF curvature method. In addition to the first anti-resonance range and broadband range, a high coherence range has also been introduced in FRF curvature method. 25 High coherence indicates the quality of FRFs and hence a good quality FRF within high coherence range is expected to generate comparatively better results. The study investigated five frequency ranges including the range before first resonance, across first resonance, across second resonance, broadband range with first four natural frequencies and high coherence range. Among the three damage cases of single and multiple damage with 5%, 12.5%, and 25% severity, only high coherence range was able to detect single damage of 5% severity. While the two ranges, the range before first resonance and high coherence were able to detect multiple damage up to the severity of 12.5%. However, for accurate detection of multiple damage the sensor was placed quite closer to the damage location which was 5 mm near a damage of 12.5% severity. In real case scenarios, the location of damage is not known so this method can be used effectively, only when the measurement points are spaced equal to or smaller than the size of the damage. Moreover, it requires the baseline information to generate the FRF curvature damage indicator. A topical research employs Multiple signal classification algorithm to detect three different type of damages in a 3D five-bay truss structure. The suggested technique provides a simple way of detection and localization in which Pseudo-spectra of healthy and damaged bay are obtained and compared, however the method is dependent on baseline information. 26
Methodology
Baseline-free FRF curvature method
In general, the FRF curvature method employs the FRFs which may be in the form of displacements, velocities, or accelerations at various points on the structure for a specified frequency range. Instead of using the complex form of FRF, its imaginary part is used in this paper. These imaginary parts of FRFs – in the form of displacements – are then used to find the FRF curvatures by applying second-order central difference approximation as given in equation (1).

where

where

In this paper, instead of using data from undamaged structure, a reference is generated by fitting the FRF curvatures from the damaged structure with a cubic polynomial. The same idea has been used in several studies with modal curvatures, modal strain energy and some other parameters. The smoothed FRF curvature value

The damage index can be obtained by finding the squared difference between the damaged and smoothed FRF curvature.

The larger value of
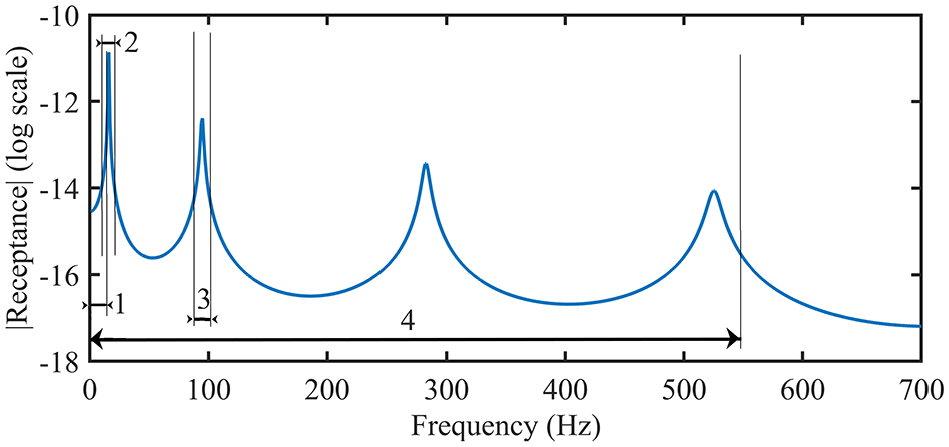
Four frequency ranges f0, f1, f2 and f WR of the FRFs indicated by 1, 2, 3 and 4, respectively.
Sensitivity analysis for each frequency range
In addition to the regions around nodal points, there are certain regions on the beam where the response is very small. The results in the form of damage indices around these regions are often false, with peaks typically dominating the useful information. These sensitive/insensitive regions vary for the frequency range across each resonance. Therefore, a sensitivity analysis is carried out considering each frequency range. The main aim of this analysis is to find the sensitive regions along the beam length and assigning low weightage to the data from the insensitive regions. This way the useful information can be highlighted for each frequency range. The sensitivity

In equation (6),

Figure 2 illustrates the normalized sensitivity of a cantilever beam (fixed from left end) for each frequency range. This illustration clearly shows that the sensitivity of the beam gradually decreases from 40% to 0% from middle region of the beam to the left end for

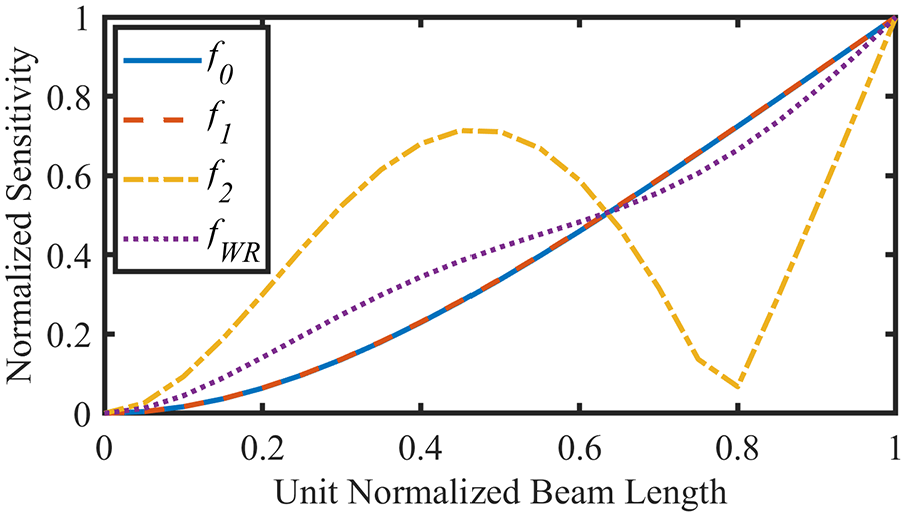
Sensitivity analysis of a cantilever beam based on different frequency ranges.
The modified damage index

Original and modified damage indices after sensitivity analysis based on different frequency ranges.
Noise suppression in FRFs
The sensitivity analysis presented in the previous section is based on nodal points and boundary condition for each frequency range and that is even applicable to the noise-free data. However, in addition to nodal points the false peaks in the damage indices could also be due to noise in the measurement data. Hence, it is important to reduce noise in the measured response before using it to generate damage indices. Gaussian kernel and moving average filters have been used with FRFs in several research works.20,27 In this paper, a Gaussian-weighted moving average filter (GMAF) is employed by using “smoothdata” function in MATLAB. The window size of 10 is used in the moving average filter. The standard deviation is one-fifth of the window size, while mean is zero. A typical FRF with 5% noise and filtered FRF is shown in Figure 15.
An example of a damage index

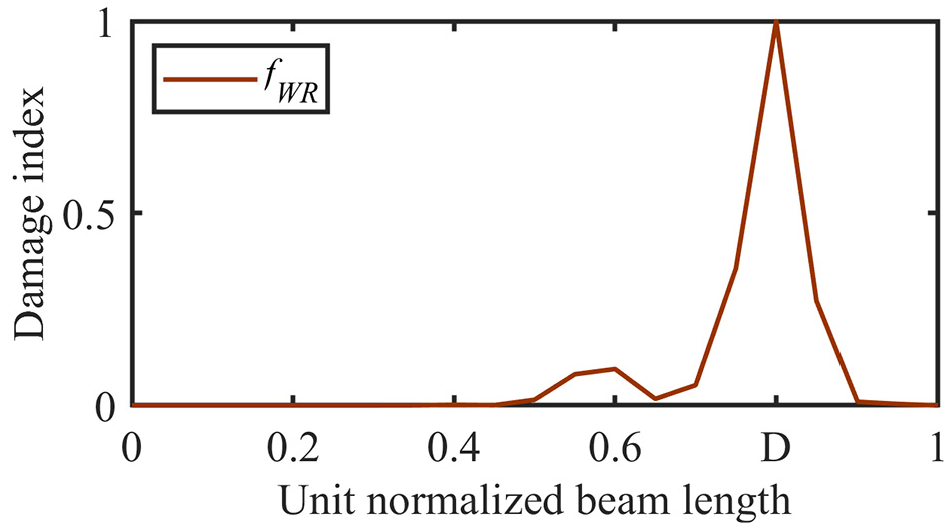
Damage indices for a multiple damage case based on f WR .
Numerical simulations
A simulated experiment is carried out in ANSYS on a cantilever steel beam with its length L, width w, and height h as 1000, 20, and 50 mm, respectively. The element is Solid Quad 4 node 182 and the material properties are Young’s Modulus
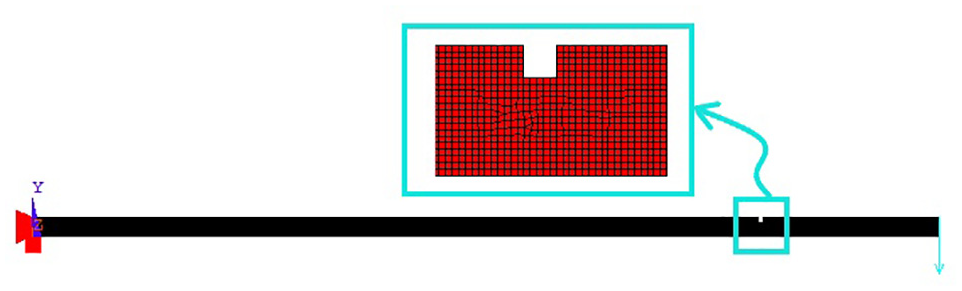
Cantilever beam and a zoomed view of damaged area.
Several damage scenarios consisting of single damage (SD) and multiple damage (MD) with varying severities are modeled in beam, as detailed in Table 1 and illustrated in Figure 6. The damage severity is defined as the percentage ratio of depth of the damage d to the height h of the beam. A convergence analysis is performed on an undamaged beam model for proper mesh size selection. The mesh size is varied by adjusting the element edge length. It is evident from Tables 2 and 3, that element edge length of 1 mm gives a good agreement between analytical and simulated natural frequencies, so a standard mesh size 1 mm is chosen for all the analyses. The error calculated between analytical and simulated natural frequencies varies from 0.053% to 0.85% based on first to fourth natural frequency, respectively. The first four analytical frequencies

Where
Damage scenarios for simulated beam experiments.

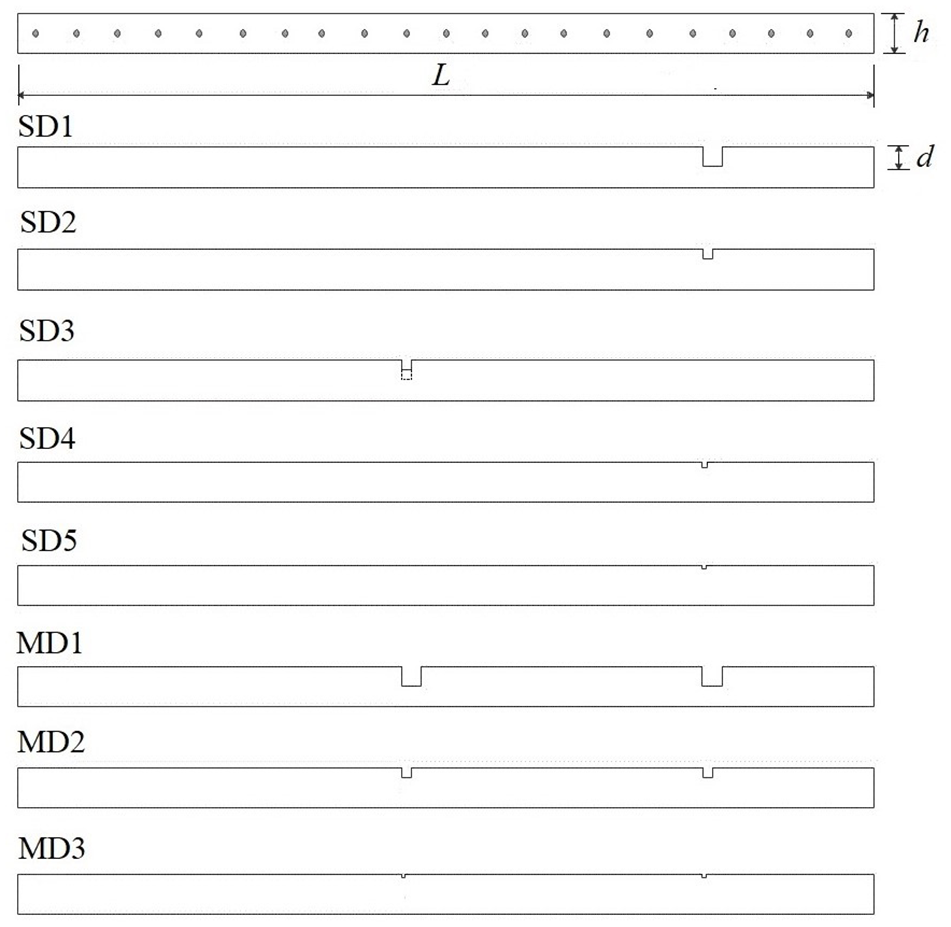
Damage scenarios, geometry, and damage location (not to scale).
Comparison of analytical and numerical natural frequencies of the undamaged beam model for varying mesh size.

Comparison of analytical and numerical natural frequencies of the damaged and undamaged beam.

Results and discussion
Since the effectiveness of the FRF curvature method relies on the chosen frequency range of FRFs, hence various frequency ranges such as

DI for SD1 at different frequency ranges.

DI for SD2 at different frequency ranges.

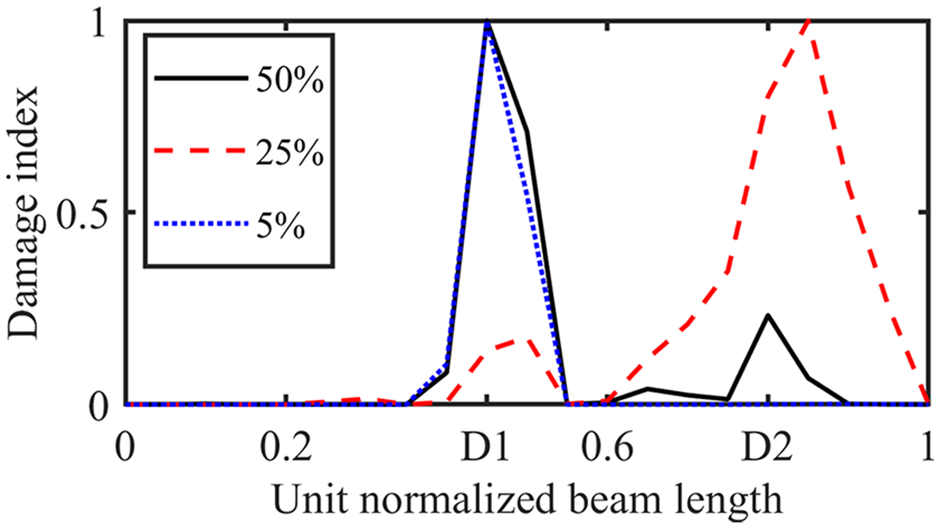
DI for SD3 at different frequency ranges-with damage severity: (a) 50% and (b) 25%.

DI for SD4 at different frequency ranges.

DI for SD4 at f WR (higher natural frequencies).
DI for SD5 at f WR (5th – 10th natural frequencies).
DI for MD1, MD2 and MD3 at f WR (1st – 4th natural frequencies).

DI for MD3 at f WR (5th – 10th natural frequencies).
The method worked well for all frequency ranges for both 50% and 25% severe single damage cases (SD1 and SD2) as can be seen in Figures 7 and 8. Among these frequency ranges, the damage index is showing double peaks only with
As the severity of the damage is further reduced (SD4), none of the above ranges provide correct damage localization as can be seen in Figure 10. To check how the detection can be improved, only
To check if the proposed method is effective for multiple damage case too, the damage indices are generated by considering the four frequency ranges. As none of the frequency range except
Effect of measurement noise
As measurement noise is inevitable in real data and it often makes a good damage detection technique ineffective. Thus, to examine whether the proposed method is reliable for real cases too, white Gaussian noise is added in the time response obtained from simulated experiments, using equation (10). 20

Here

Noisy (5%), Filtered FRF and Noise-free FRF.
For further investigation, various noise levels such as

DI after noise addition in SD1, considering: (a) f1, (b) f2, and (c) f WR .
DI after noise addition in SD2, considering: (a) f1, (b) f2, and (c) f WR .
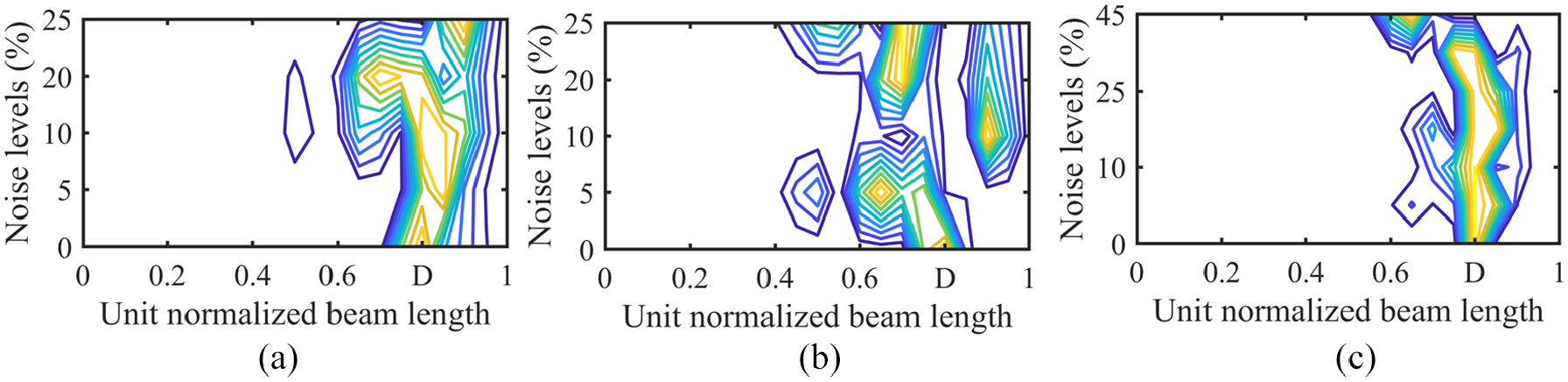
DI after noise addition in: (a) SD3, considering f WR (1–4), (b) SD4 considering f WR (5–10), and (c) SD5 considering f WR (5–10) range of frequencies.
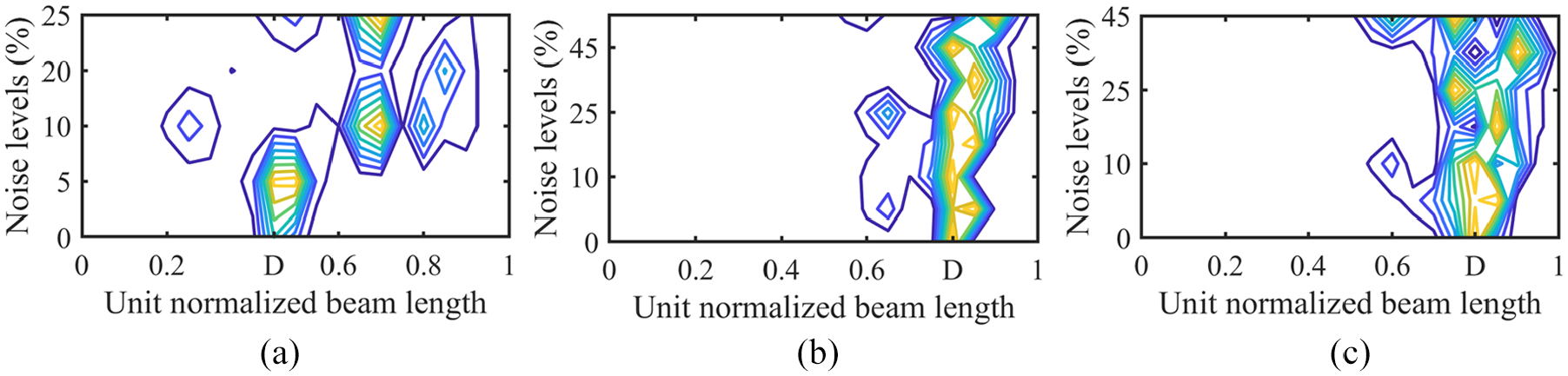
DIs after noise addition in MD1 using f WR with frequency range: (a) 1–4 and (b) 4–10.

DIs after noise addition in MD2 using f WR with frequency range: (a) 1–4 and (b) 4–10.

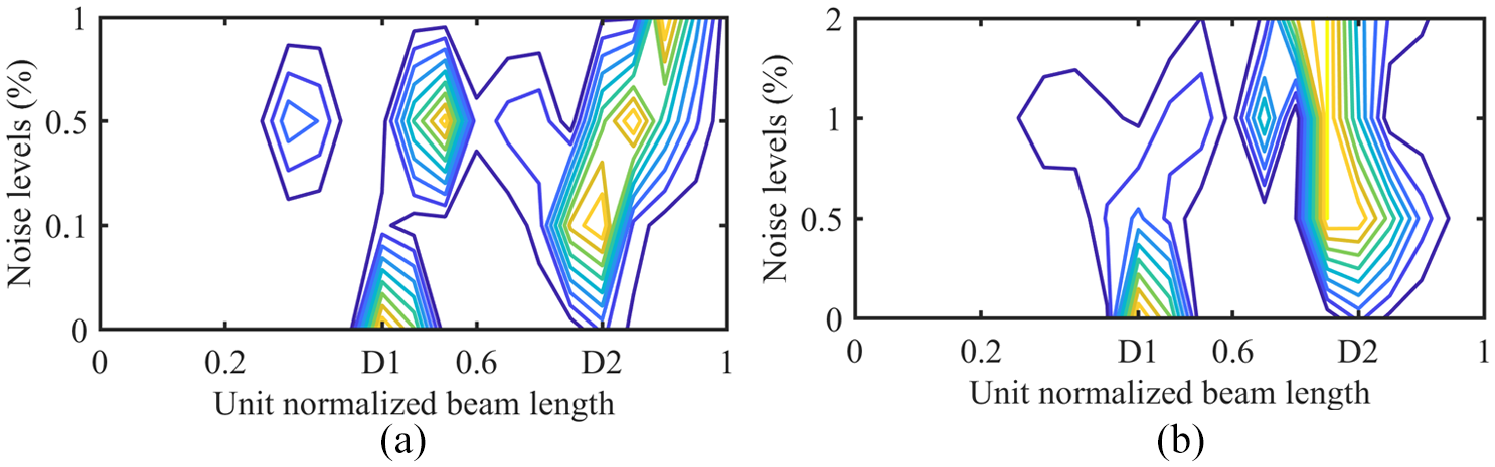
DIs after noise addition in MD3 using f WR with frequency range: (a) 1–4 and (b) 4–10.
The noise model is further applied on multiple damage scenarios, MD1, MD2, and MD3. Since, multiple damage detection is challenging as compared to single damage detection, particularly under noisy conditions, so the noise levels considered for multiple damage cases are not as high as single damage cases. Initially first four natural frequencies are considered for
Experimental results
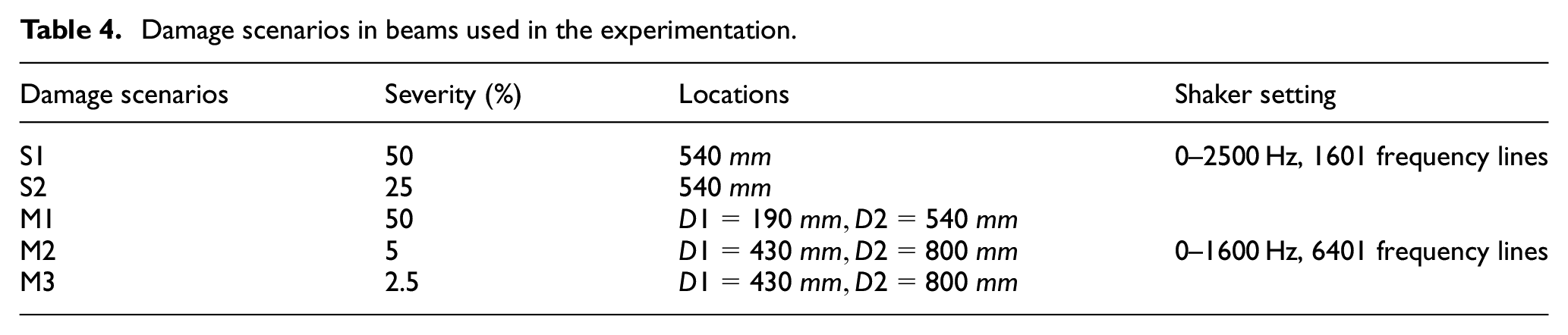
The experimental setup comprises two simply supported steel beams of same dimensions

where,

Schematic of experimental setup.
Damage scenarios in beams used in the experimentation.
The beam is elastically supported from the two ends hence, simulating the free-free boundary condition. Based on this boundary condition, a separate sensitivity analysis is conducted, and the beam was found to be insensitive around its both ends. The results of each damage scenario against each frequency range are shown in Figures 23 and 24. For S1, it can be seen in Figure 23(a) that there is a clear dominant peak at damage location for

DIs for different frequency ranges for: (a) S1 and (b) S2.

DIs for different frequency ranges for (a) M1, (b) M2 and (c) M3.
In case of multiple damage M1, the damage index for
Although the experimental results cannot be compared directly with the simulated results due to the different boundary conditions, even then the results are in agreement to the simulated results. For severe multiple damage case, only
It is understood that
Conclusion
This paper presented a baseline-free FRF curvature method that is tested numerically and validated experimentally on beam-type structures using sparse measurement data. In practice the damage location is not known, hence the strength of any damage detection technique lies in localizing the damage even when the sensor is placed not close to the damage location. Using FRFs instead of modes precludes the errors associated with the modes extraction. Another advantage is that it eliminates the need for any data from a healthy structure. As the effectiveness of the FRF curvature method depends on the chosen frequency range of the FRF, hence different frequency ranges were investigated. The experimental response usually has noise in the measured data and this noise often cause false indications of damage. To tackle that, a Gaussian-weighted moving average filter is used to reduce the noise in the measured FRFs. There are certain regions along the beam length that are insensitive to damage detection and this insensitivity is associated with the boundary conditions and nodal points based on each frequency range. In this paper, a sensitivity analysis was carried out initially to indicate those insensitive regions of the beam. Based on the computed normalized sensitivity, the modified damage indices for each frequency range are generated. The simulated analysis with and without noise revealed
Footnotes
Acknowledgements
The experiments were performed in Vibration and Acoustics lab in School of Mechanical and Manufacturing Engineering, UNSW during PhD studies of second author. The authors are thankful for providing the facility for data collection.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.