
Abstract
Bearing diagnosis has attracted considerable research interest; thus, researchers have developed several signal processing techniques using vibration analysis to monitor the rotating machinery’s conditions. In practical engineering, features extraction with most relevant information from experimental vibration signals under variable operation conditions is still regarded as the most critical concern. Therefore, actual works focus on combining Time Domain Features (TDFs) with decomposition techniques to obtain accurate results for defect detection, identification, and classification. In this paper, a new hybrid method is proposed, which is based on Time Synchronous Averaging (TSA), TDFs, and Singular Value Decomposition (SVD) for the feature extraction, then the Adaptive Neuro-Fuzzy Inference System (ANFIS) which gathers the advantages of both neural networks and fuzzy logic is applied for the classification process. First, TSA is used to reduce noises in the vibration signal by extracting the periodic waveforms from the disturbed data; thereafter, TDFs are applied on each synchronous signal to construct a feature matrix; afterwards, SVD is performed on the obtained matrices to remove the instability of statistical values and select the most stable vectors. Finally, ANFIS is implemented to provide a powerful automatic tool for features classification.
Keywords
Introduction
Bearings are regarded as the most common mechanical components in rotating machines. They are used to reduce the friction between all moving parts in the rotary devices such as alternators, compressors, turbines, etc. However, they are considered to be the most vulnerable elements in industrial equipment since 40% of electric motor failures are caused by bearing defects. 1 Therefore, rolling element defect detection at earlier stages is mandatory to avoid unexpected failures, production downtime, or efficiency degradation. Many recent studies have focused on the use of vibration signals, as they carry a relevant dynamic information about the machine’s state. However, due to the variation in rotating machines’ working conditions (load and speed), vibration signals exhibit non-linear and non-stationary behavior where the fault signatures are usually embedded in an overwhelming and disturbing content, especially at the early stages. During decades, researchers have developed signal processing techniques to monitor the rotating machinery’s conditions. Short-term Fourier Transform (STFT),2–4 Wigner Ville Distribution (WVD),5,6 Wavelet Transform (WT),7,8 Hilbert-Huang Transform (HHT),9–11 and Hilbert Empirical Wavelet Transform (HEWT)12,13 were the most commonly used time-frequency techniques, and recently Fast Kurtogram (FK)14–16 and Autogram.17–20 However, signal processing methods have the ability to detect the occurrence of a bearing failure, but without providing any information about the defect nature. Moreover, the variation in the rotating machine’s load and speed will eventually lead to inaccurate results. 20 Currently, intelligent classification techniques have gained popularity in numerous industrial applications.19–27 Fuzzy logic System (FLS) and artificial neural network (ANN) have been effectively used for gear and bearing diagnosis. Fuzzy and neural techniques are soft computing approaches which can be easily implemented for complex systems to monitor their behaviors. By simulating human thinking, ANN has carried various advantages in detecting and identifying different defect types without having an expert knowledge of the system. 20 However, ANN requires high-performance processors with parallel processing power according to their structure. 28 However, no specific rules are available to define the ANN structure but an appropriate network structure can be achieved by experience. 28 In the other hand, FLS is a computer application that simulates the expert’s inference process and executes his action.29,30 FLS uses fuzzy logic, numbers, and fuzzy sets to reflect and to process inaccurate and unclear knowledge.29,30 In the information about the rotating machinery status, there exist a given degree of imprecision and uncertainty, which cannot reasonably be resolved and handled by traditional expert systems such as neural networks. Therefore, FLS has proven to be more suitable for rotating equipment fault diagnosis without extensive background. Yet, the Fuzzy Inference System must be modeled with an expert assistance, since it needs to be adjusted to evolve an acceptable rule-based form. 31 By merging the advantages of ANN and FLS and excluding their drawbacks, Adaptive Neuro-Fuzzy Inference System (ANFIS) is implemented. ANFIS provides the best neural network training feature and a heuristic interpretation of the process results similarly to fuzzy logic theory, thereby offering a valuable approach which could be used for fault diagnosis applications. 19 In machine learning, the primary objective stays to extract the most relevant features which play a dominant role in determining and influencing the output results. Therefore, feature extraction seems to be the most complex procedure which requires an advanced algorithm-based on robust signal processing techniques. The features extraction process first requires an efficient signal processing technique which filters and eliminates the influence of noise which eventually leads to erroneous diagnosis results. TSA is known as the best tool that reduces the influence of noise since it eliminates all uncorrelated parts in the signal such as noise and random impulsive components and only periodic patterns that are synchronous with the gear failure are kept. 32 Feature extraction process initially requires an efficient signal processing technique that filters and eliminates the influence of noise, which ultimately leads to erroneous diagnostic results. TSA has been widely used for bearing and gear condition monitoring. For instance, Guo and Wu used the signal envelope of the TSA to improve the signal-to-noise ratio in order to extract failure frequencies in planetary gearbox. 32 Ismail et al. also have combined TSA and Jerk energy to quantify the severity of bearing failures in electromechanical actuators (EMA). 33 Furthermore, many works have adopted time-energy indicators mainly: standard deviation (SD), entropy (EN), root mean square (RMS), upper bound (UPP), as time-domain features (TDFs) used in order to extract the most relevant information from the filtered signal and to describe the machine state. Nevertheless, these features, which are organized into matrices (feature matrices), have an extremely large dimension that may lead to serious troubles in the classification process and disrupt the most powerful classification algorithms, besides making the process considerably slow. Thus, dimensional reduction plays a major role in feature classification. A smaller dimensional size would be more useful for identifying data patterns which would otherwise be unnoticed. Principal Component Analysis (PCA), 23 and Singular Value Decomposition (SVD)13,34 have been the most commonly adopted methods for dimensional reduction. SVD is always considered as an accurate matrix analysis technique that has been widely used for noise reduction, data compression, and feature extraction.13,34
In this paper, we have applied TSA on the original vibration data in order to remove the non-periodic signals that are directly related to noise. Then, some TDFs are computed from the synchronous signal to extract the most relevant information in the data and to build the features matrices. The obtained matrices are then re-dimensioned by SVD where the singular values of the corresponding matrices will be the input of the ANFIS classifier in order to identify bearing defects. Five kinds of bearing defects in addition to some healthy states are considered for this work under several loads and at various speeds. The present paper is arranged as follows: section “Introduction” provides a comprehensive introduction about the main study. Section “Theoretical background” gives a solid mathematical background, and section “Experimental study” presents experimental setup, in addition to the results and discussion. Finally, the paper is ended with a conclusion and references.
Theoretical background
Time synchronous averaging
Time synchronous averaging (TSA) is one of the most efficient methods for gearbox diagnostics, 35 it is used to eliminate noise by maintaining only the periodic waveforms and eliminating the non-periodic patterns which are related to noise (Figure 1). TSA calculates the average of the measured signals at each period according to the input shaft speed in order to obtain the same length of data points.

Demonstration of the TSA technique.
Mathematically, TSA can be described as follows 36 :

Where
Statistical features
In order to extract the defect information from the bearing time data, time energy indicators such as standard deviation (SD) and upper bound (UPP) are presented, respectively:


Singular value decomposition
Singular value decomposition (SVD) is an excellent matrix analysis technique which has been extensively used for noise reduction, data compression, and feature extraction. The SVD is a matrix transformation algorithm that decomposes any given matrix

Where:
The matrix M is represented as given in equation (5).


Where
Adaptive neuro fuzzy inference system
Adaptive neuro fuzzy inference system (ANFIS) was designed as a software process that takes the advantages of Artificial Neural Network (ANN) and Fuzzy Logic System (FLS) in order to make automatic decisions about the running machine’s health status. ANFIS uses the same learning strategies in the neural network and also adopts the integration of fuzzy reasoning and neural networks. The hybridization approach is carried out to provide highly accurate learning performances. Fuzzy logic interprets, arranges, and adds an element of rationalization to the data as well. Four compositions of the fuzzy inference system exist which are: fuzzifier, fuzzy rules, defuzzifier, and fuzzy inference engine. 31 A fuzzy inference system’s output is defined through the construction of fuzzy rules, while the inputs are fuzzified using membership functions. Thus, it is possible to construct the rule’s strength and to determine its consequence. 31 A distribution of output is given by combining these consequences. Sugeno and Mamdani are familiar models of fuzzy inference systems. 31 Unlike the Mamdani type, no output function is added to the system for the Sugeno fuzzy inference system as given in Figure 2.

Sugeno fuzzy inference model.
An ANFIS structure is designed with two inputs and five layers, where nodes and adaptive nodes are represented by squares and circles respectively (see Figure 3).





Adaptive neuro-fuzzy inference system structure.
To better understand the functionality of this system, Figure 3 gives an example of two inputs and one output. 31
Experimental study
Test rig description
Realistic vibration signals were provided by the bearing data center supported by the Case Western Reserve University
37
using the test rig shown in Figure 4. The latter has been widely used to validate many recent studies. The rolling element bearing test rig consists of

Experimental bearing test rig with a schematic illustration.
The conditions fault mode involving outer race (OR) fault, inner race (IR) fault, and the rolling element (B) fault, are considered in this study. Single point defects of 0.007 and 0.028 inches in the inner race (IR) and rolling element (B), and single point defects of 0.007 inches in the outer race (OR) were introduced separately into the test bearings by electro-discharge machining (EDM). The fault position relative to the load zone is “centered.” As given in Table.1, experimental signals have been collected for several work conditions under different loads and speeds (0 HP (1797 rpm), 1 HP (1772 rpm), 2 HP (1750 rpm), and 3 HP (1723 rpm)).
Work conditions.

Table 2 indicates the geometry of the considered bearing. The data collection system consists of a high band width an amplifier which is particularly designed for vibration signals and a data recorder with a sampling frequency of 12 KHz. When the rolling elements pass over the defective areas, small collisions occur producing periodic mechanical shock waves that affects the natural mechanical resonance frequencies in the motor. The rate of these shock waves is equal to one of the characteristic fault frequencies given in Table 3.
Bearing parameters.

Formula of expected bearing faults frequencies.

Experimental results and discussion
Data sets provided by Case Western Reserve University Bearing Data Center 37 have been used to assess the efficiency and accuracy of our suggested bearing diagnostic approach. Figure 5 illustrates the recorded vibration signals with healthy bearings and three different defects mainly: OR, IR, and B of 0.007 and 0.028 inches under 0 HP as load.
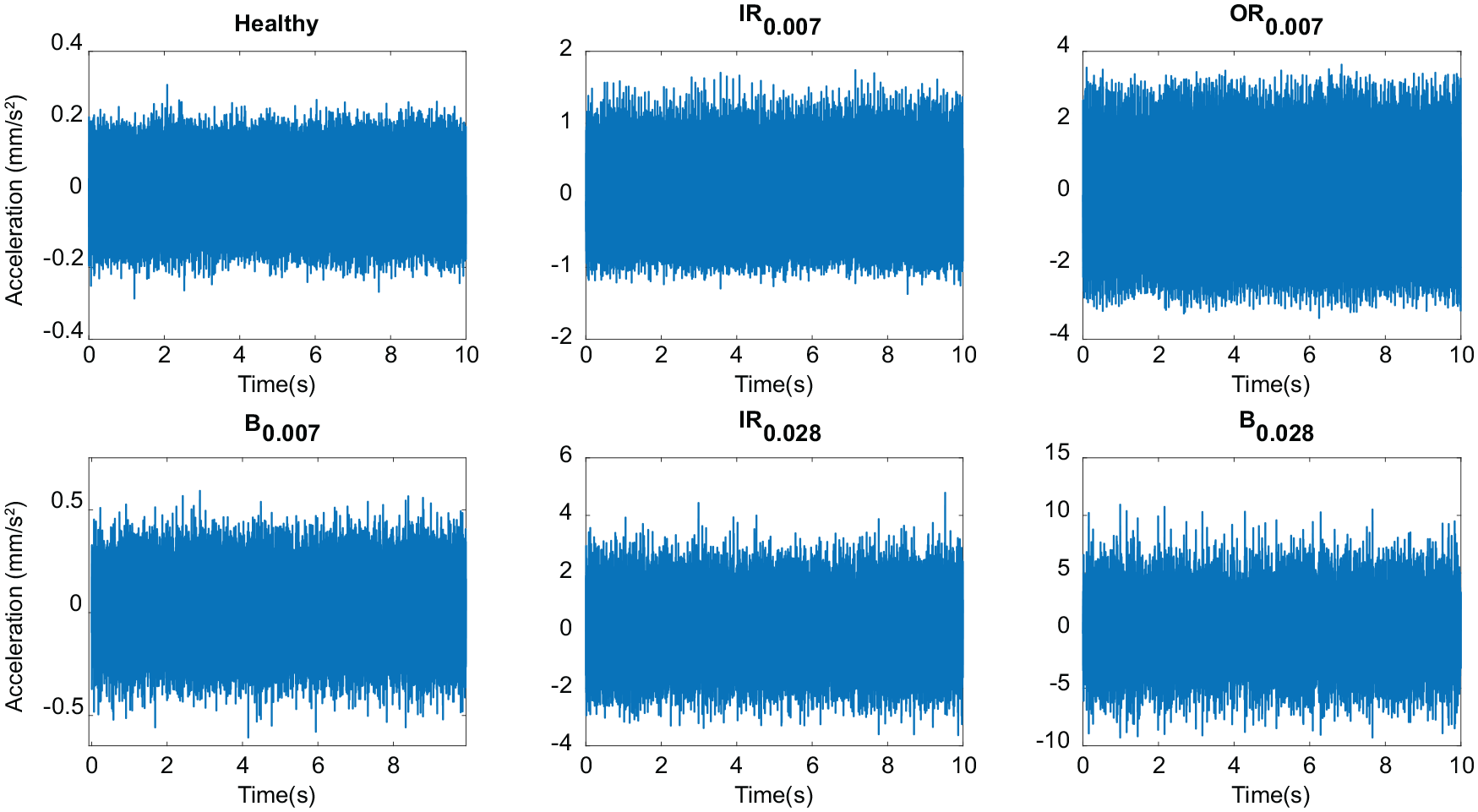
Vibration signal of various bearing defects under 0 HP load and 1797 rpm speed.
Temporal analysis
When the rolling components pass through the defective areas, small impacts occur which produce some mechanical shock waves alongside with original vibrations. These impacts may affect the natural mechanical resonance frequencies of the drive. The same phenomena appear whenever a defect affects other bearing parts, and its recursion rates will be considered as the characteristic frequencies of the defect (Tables 3 and 4). However, we can obviously see from Figure 5 that the three faults IR, OR, and B with 0.028 and 0.007 inches do not make any notable impact on the acquired vibration signal due to negligible increase in the energy of the time signal and no recurrent shock waves are remarked at each spinning period. The obtained signals may carry noises that can be produced by either electrical or mechanical sources. This makes the initial detection of the existing fault even more difficult. Thus, it is practically impossible to detect any presence of a fault by handling the signals in time domain for the reason that the fault impulses are hidden by the present noises and therefore, a further study is required in such a case to identify the bearing defects in different domain.
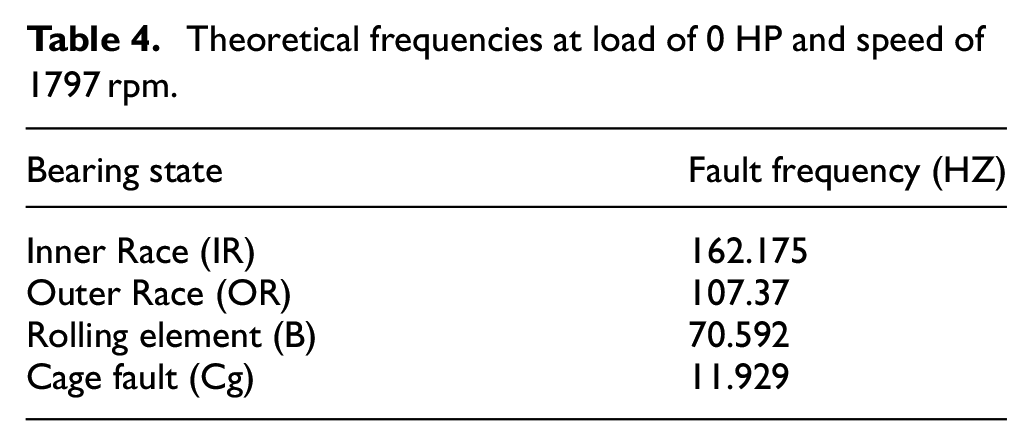
Theoretical frequencies at load of 0 HP and speed of 1797 rpm.
Feature extraction based on TSA, TDFs, and SVD
Our proposed method uses the TSA, TDFs, and SVD combination to extract the most relevant information from the raw vibration signal while the ANFIS is used to classify those features in order to identify several bearing defects under variable loads and speeds (see Table 1).
TSA is first applied to original vibration signals with faultless then with different bearing defects (OR, IR, and B) under various loads as given in Table 2 to eliminate non-periodic waveforms in the signal which are related directly to the noise. Subsequently, synchronous signals are split into many samples to create an orthogonal matrix. After that, Standard Deviation (SD) and Upper Bound (UPP) indicators are applied for each matrix obtained from the previous step in order to construct the feature matrix for each bearing state. In order to avoid the dimensionality curse, SVD is then further used to extract the singular values and to solve the problem of similarity between every bearing defect. Finally, the fault feature vectors obtained by TSA, TDFs, and SVD are used to identify and classify the bearing states by using the ANFIS which is constructed from fuzzy logic and artificial neural network. Figure 6 gives a better illustration about the proposed method.

Flowchart of proposed method.
Figure 7 shows the three singular values of the SD and UPP feature matrices for the six different bearing states under variable speed and loads.
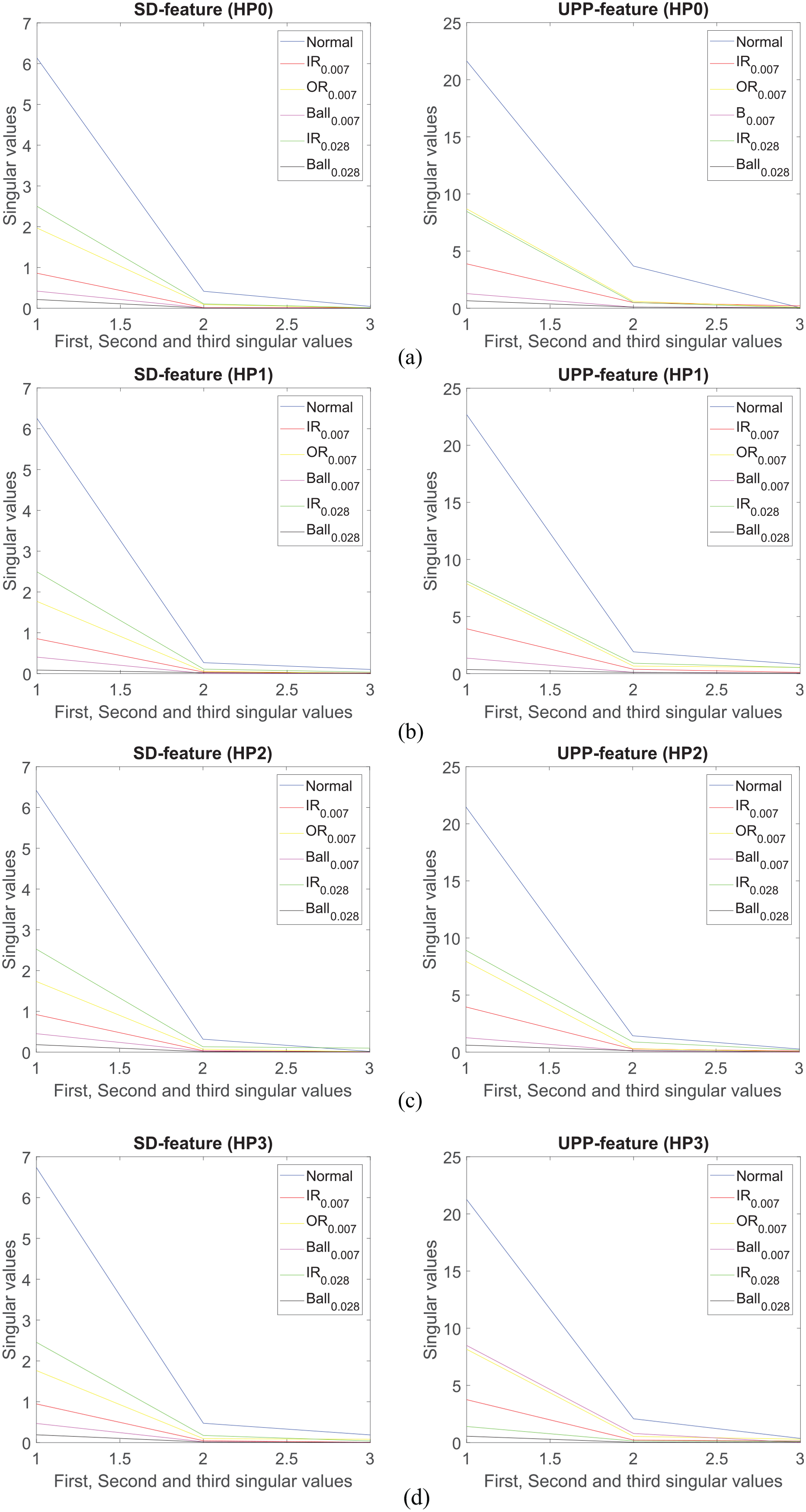
The three singular values of considered faults under load: 0 HP (a), 1 HP (b), 2 HP (c), and 3 HP (b).
From Figure 7, we see that there are almost no overlapping samples between the six bearing states under all loads and speeds for the first singular values (SV1) of both SD and UPP features. However, the second singular values (SV2) are less separable due to their small values, while for the third singular values (SV3), practically all the points intersect at all bearing states under the same operating conditions. Figure 7 indicates that only the first singular values have a higher separability since no similarity is occurred between the six bearing states compared to the second and third singular values using the same indicators. Therefore, another representation is required in order to notice any confusion between the bearing states.
In order to assess the impact of our proposed method before further investigation, Figure 8 displays a 3D projection of the first three singular values obtained by TSA, TDFs (SD and UPP), and SVD for the six bearing state under several loads and speeds. From Figure 8, it is obvious that even under variable loads and speeds and for six bearing states, the singular values extracted by both SD and UPP show a high degree of coincidence. Besides, it is clear that the gaps between the clusters for the six faults are satisfactory; hence, the implementation of the mentioned method shows promising results for the features classification under various work conditions. Certainly, our proposed approach takes ahead step in the feature classification, and it can be used to produce a new robust automatic classification method for bearing fault diagnosis.

Projection classification charts of the first three singular values obtained by: SD (a) and UPP (b) for different working conditions.
State classification based on adaptive neuro fuzzy inference system
In this section, the fault feature vectors obtained by TSA, TDFs, and SVD are used to identify and to classify the bearing states by using the ANFIS. The proposed approach is tested under 24 different operating modes with six different bearing states (see Table 1). Each vibration signal is divided into 12 data sets; we end up with 288 samples (48 samples for each bearing state) by selecting 24 operating modes. Thereafter, TSA is applied on each sample to eliminate non-periodic waveforms in the signal which are related directly to the noise and to keep only the periodic patterns. Then, UPP and SD indicators are applied for every matrix in order to obtain the feature matrix for each bearing state. Afterward, SVD is further used to reduce the dimensionality of the feature matrix and to provide more stable vectors by extracting first three singular values for each bearing states under every working condition. Both SD and UPP singular values will be the inputs of ANFIS classifier to detect, to identify, and to classify different bearing states even under different working conditions. The data sets are divided into training data (33.33% of data sets) and the rest are considered to be the test data as shown in Table 5, while in Table 6, the ANFIS parameters are given.
Testing and training data.

ANFIS parameters.

Figure 9(a) and (b) illustrate the testing and training outputs of the proposed approach, respectively. It is clearly illustrated in Figure 9(a) and (b) that under a noisy environment or under different working conditions, especially in non-load case, all samples are well classified as well as the obtained outputs meet the target output classes. Experimental results obtained highlight the effectiveness and the accuracy of the proposed approach, which is based on TSA, TDFs, SVD, and finally ANFIS. Our proposed approach provides a high classification rate that implies a well decision for bearing fault diagnosis, even under different working conditions with various speeds and loads.

Training (a) and testing (b) outputs with ANFIS using the proposed method.
A comparative study is carried out to confirm the advantage of our hybridization. The comparison is made between the proposed method, TDFs-ANFIS, TSA-TDFs-ANFIS, and TDFs-SVD-ANFIS for all different operation modes.
Figure 10 shows testing outputs of proposed method (a), TDFs-ANFIS (b), TSA-TDFs-ANFIS (c), and TDFs-SVD-ANFIS (d) for the six bearing state under the different operation modes. Obviously, it can be seen that except our hybrid technique all the combinations have huge difficulties concerning the bearing fault classification. Table 7 indicates the classification accuracy for all methods which were conducted in our comparative study. Experimental results confirm that our proposed approach takes ahead step in the feature classification, and it can be used to produce a new robust automatic classification method for bearing fault diagnosis.

Testing output of TDFs-ANFIS (a), TSA-TDFs-ANFIS (b), and TDFs-SVD-ANFIS (c).
Classification accuracy methods.

Conclusion
Rotary machines are extensively used today in a wide variety of industrial applications such as power production, vehicle, and manufacturing processes. They consist of several moving parts such as gears, bearings, and shafts that operate simultaneously. Therefore, any unexpected failure can affect the performance of the entire industrial process. Bearings are considered to be the most vulnerable parts in industrial equipment since 40% of electric motor failures are caused by bearing defects. Therefore, monitoring these vulnerable elements become crucial step to avoid any catastrophic failure. A novel diagnostic method for bearing defect detection, identification, and classification under variable working conditions has been discussed in this paper. Our advanced approach is based on TSA, TDFs, and SVD for fault feature extraction, combined with ANFIS for fault classification. TSA has been applied to remove noise from the raw vibration data by separating periodic patterns from the disturbed signal. Thereafter, TDFs have been applied on each synchronous signal to create the feature matrix; afterward, SVD is computed from the obtained matrices in order to eliminate the instability of the statistical values and only the most stable vectors are selected. Finally, the selected vectors are configured to be the inputs of ANFIS for features classification. A comparative study was conducted between the proposed approach and three other combinations using a real benchmark test delivered by Case Western Reserve University. Experimental results confirm the robustness and the effectiveness of the proposed approach even in the presence of high background noise.
Some future studies are aimed to enhance the field of bearing condition monitoring by incorporating certain modern indicators to monitor the rotating machines’ health status, and to estimate their Remaining Useful Life (RUL) using deep learning techniques.
Footnotes
Acknowledgements
The authors would like to thank the Solid Mechanics and Systems Laboratory (LMSS), University M’Hamed Bougara of Boumerdes, Faculty of Technology, Boumerdes, and the General Directorate for Scientific Research and Technological Development (DGRSDT), Algeria.
Handling Editor: Andreas Rosenkranz
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.