
Abstract
The present paper proposes an adaptive global nonlinear sliding mode controller (AGNSMC) for the tracking problem of a quadrotor subjected to external disturbances. In order to eliminate the reaching phase and to guarantee the sliding mode of the quadrotor states in the initial time, a novel control law is developed. The upper bounds of disturbances affected the quadrotor dynamics are rejected based on adaptive laws for the both attitude and position subsystem. The tracking performance is enhanced by using the suggested controller. The stability of quadrotor is guaranteed and the global sliding mode surfaces converge to origin values in a finite time. To show the robustness of the proposed control approach against the external disturbances, simulation results are presented and compared with the results of the super-twisting-integral sliding mode controller.
Keywords
Introduction
Background and motivations
In recent years, quadcopter has become very popular due to the fast technological development growth which significantly impact how today’s electronics devices are shaped, such as micro-controllers, sensors, and lithium polymer batteries. Mechanical structure simplicity and low cost development also plays in favors of this platform and make it even goes mainstream. Quandcopets finds its use in many areas such as agriculture, aerial photography and videography, payload carrying, geographic mapping of inaccessible terrain and locations, and in scientific research and development, etc.
This platform is a naturally unstable, under-actuated and multi-input/multi output system, meaning that driving and controlling the system is a bit challenging and requires a strong and accurate mathematical description in order to design an adequate controller and stabilize it with respect to the predefined performance requirement. Another important aspect that should be taken into consideration is uncertainties in the model also known as internal uncertainties since unmodeled dynamics or parameters uncertainties can affect heavily the behaviors of the UAV. In outdoor navigation, external disturbances such as wind can affect also quad-rotors especially if we consider small size ones. For this matter, controller design is significantly important since it has to stabilize the vehicle and reject internal and external disturbances in a finite time in order to meet design requirement. Sliding mode controller is one of the most robust architecture which guarantees the desired performance, a variant such as global sliding mode controller can deal with uncertainties, 1 while an adaptive sliding mode controller can be more robust against parametric uncertainties Nadda and Swarup. 2
Literature review
Chu et al.
3
treat the problem of trajectory tracking in a finite time for quadrotors subject to unknown disturbances which are estimated by an observer then compensated by the finite time controller. In Alqaisi et al.
4
an improved non-singular terminal super-twisting controller is used to deal with the tracking problem and eliminate singularity when position error converge to zero. Zhang and Chen in
5
used another strategy for position tracking and disturbances rejection based on an active disturbance rejection control (ADRC) using a dynamic surface which uses a first order-filter to obtain the virtual control derivative which simplifies the control law. Disturbances are estimated based on an extended state observer. In Soltanpour et al.
6
the paper consider the problem of model linear parameter varying, a gain scheduled
Contributions
In present work proposes an adaptive GNSMC strategy to track the desired path of the quadrotor system. The proposed control approach is developed on the basis of the Lyapunov theory, which can be applied to the quadrotor subjected to disturbances. Moreover, the disturbances affected negatively the tracking performance. In order to deal with this problem, those upper bound are estimated by using adaptive gain tuning laws. Simulation results show the performance of this method with respect to external disturbances and time-varying of the drag coefficients. The main contributions of this study can be given the following points.
A robust adaptive nonlinear global sliding mode controller is developed for following control of quadrotor system under external disturbances and uncertainties.
Without the knowledge of the disturbances bounds, adaptive laws are proposed to estimate these bounds.
The proposed controller archives strong robust performance and establishes finite finite-time convergence of the quadrotor state variables. Compared with proportional-derivative-integral sliding mode controller combined with the super-twisting algorithm presented in Labbadi and Cherkaoui, 18 the proposed controller has a strong robustness against external disturbances and random uncertainties of the drag coefficients.
Paper organization
The paper is organized as follows: The dynamic model of quadrotor is given in Section II. The proposed control scheme is presented in Section III. The simulation results are given in Section IV. Finally, the paper closes in Section V with conclusions.
Mathematical modeling of a quadrotor and problem definition
The quadrotor has two pairs of propellers, as depicted in Figure 1. Varying the speed of four rotors in order to control this vehicle. The underacted part of the position of the quadrotor can be controlled by changing the attitude angles, the attitude and altitude of the quadrotor can be controller directly.
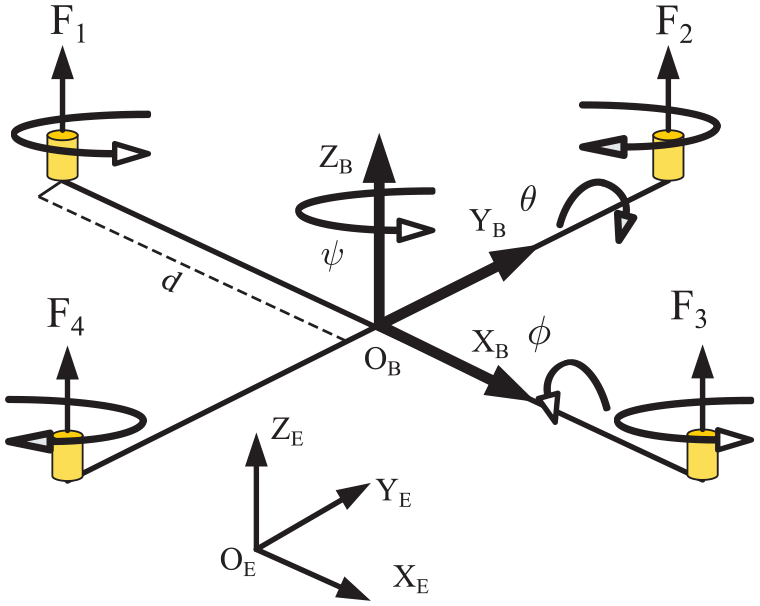
Quadrotor UAV.
The problem of quadrotor dynamics has been studied by many researchers.19–21 Based on the works developed in,19–21 the nonlinear dynamic modeling of quadrotor can found as:
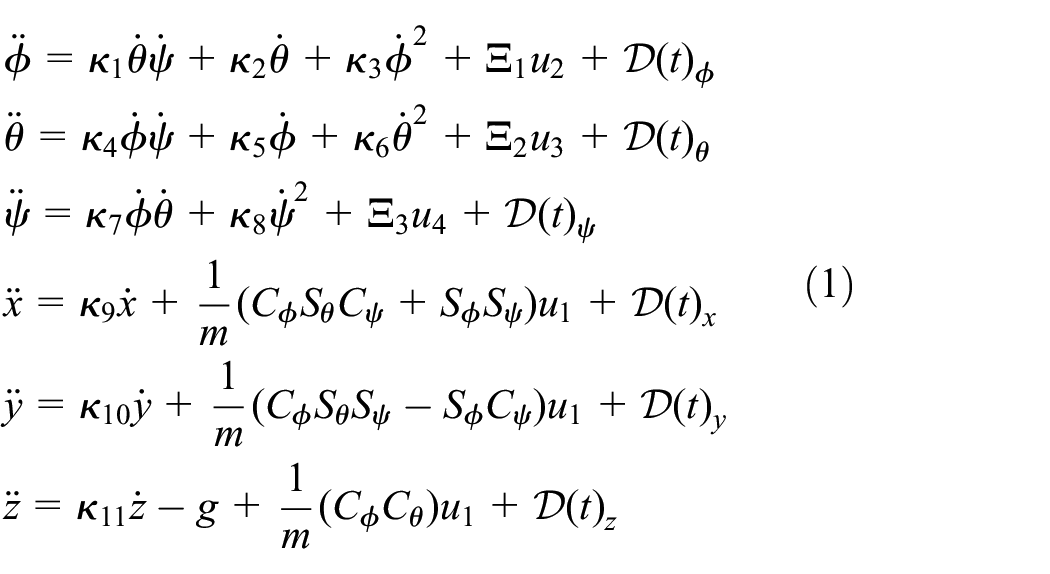
with:
where
The quadrotor system has four inputs and six outputs, which means that this system is under-actuated. In order to solve this problem, three virtual control signals are created as follows:

Then, the desired angles and total thrust can be obtained as:



The control problem of this work is given as follows:
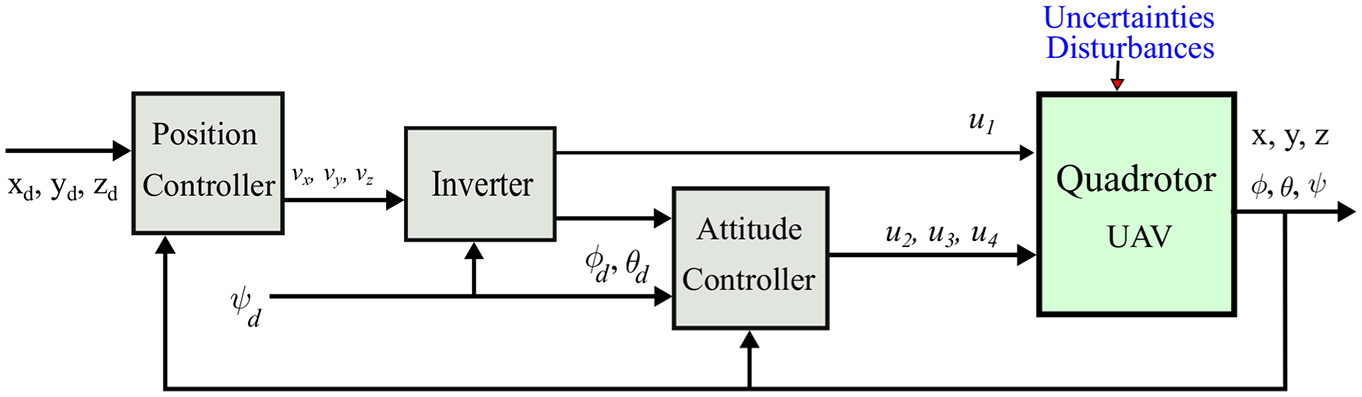
Block diagram of the proposed control scheme.
Adaptive global nonlinear sliding mode control for the quadrotor system
This section is devoted to present the design and the analysis of the AGNSMC approach for the attitude and position subsystem as shown in Figure 2. The control objectives are given by the following points: (i) ensuring tight position regulation under disturbances/uncertainties by generate the desired angles (
Design of AGNSMC for position and attitude subsystem
Define the tracking errors and its derivatives for both attitude and position as:

Tacking the global nonlinear sliding surfaces for the attitude and position subsystems as Mobayen et al. 22 :






with






where
The goal of the GSMC is to force the tracking error
Take the time-derivative of the sliding surface of the position variable


Substituting the double time derivative of tracking error into equation (7), we can get

The equivalent control law for

However, the quadrotor system is subjected to uncertainties and disturbances, then the equivalent control law cannot assure the control performance. In order to solve this problem, a switching control law is given to remove the disturbances imparts on the system dynamics. Also, the upper bound of the disturbance
Then, the switching control law can be defined as:

where

with
As a result, the ultimate control law for
Similar to
Position variable

Position variable

Roll motion controller:
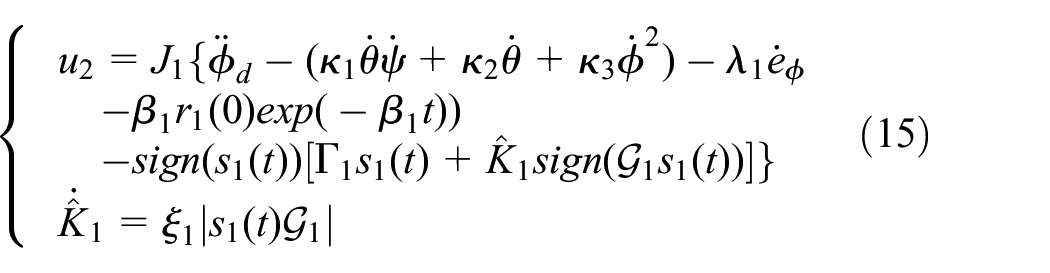
Pitch motion controller:
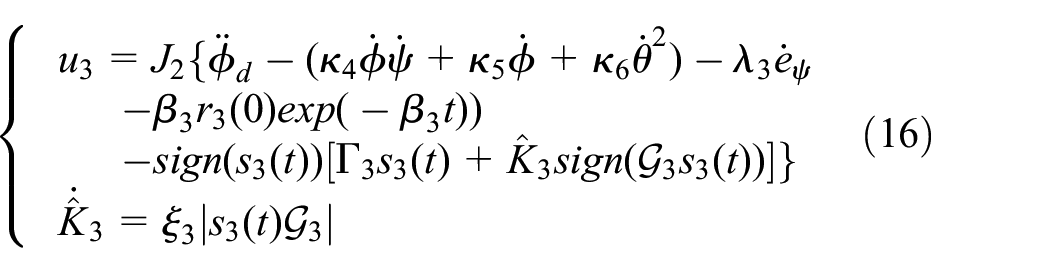
Yaw motion controller:

The control signals

where
Stability analysis of the proposed controller
The result for the ANGSMC proposed in this work is listed in Theorem 1 and its proof.

The derivative of

Substituting equations (4) and (12) into equation (5d), the derivative of

Substituting equations (21) and (11) into equation (20), we can get,

From the above analysis, it can be seen that Theorem 1 is proved.
The same stability process as the position
Results and discussion
In this section, simulation results are presented to show the performance tracking and to validate the efficiency of the AGNSMC proposed in this work. The suggested controller is compared with the results of the method of Labbadi and Cherkaoui presented in Ref.
18
The initial conditions are selected as



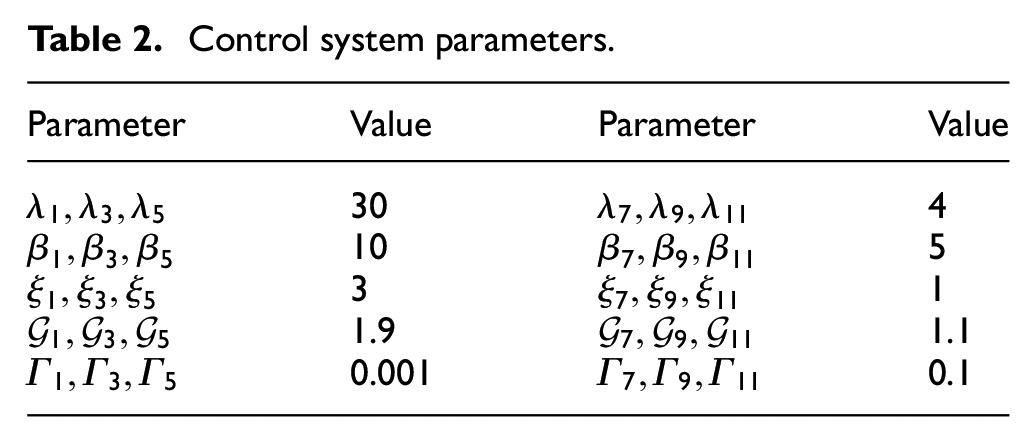
The quadrotor parameters are given in Table 1. The tuning parameters of the ANGSMC control strategy are presented in Table 2.
Quadrotor parameters.

Control system parameters.
The disturbances affected the position/attitude of the quadrotor are chosen as shown in Figures 3 and 4, respectively.

Disturbances applied on position subsystem.

Disturbances applied on attitude subsystem.
In order to test the performance of the proposed controller, the variation of the drag coefficients are considered as shown in Figure 5.
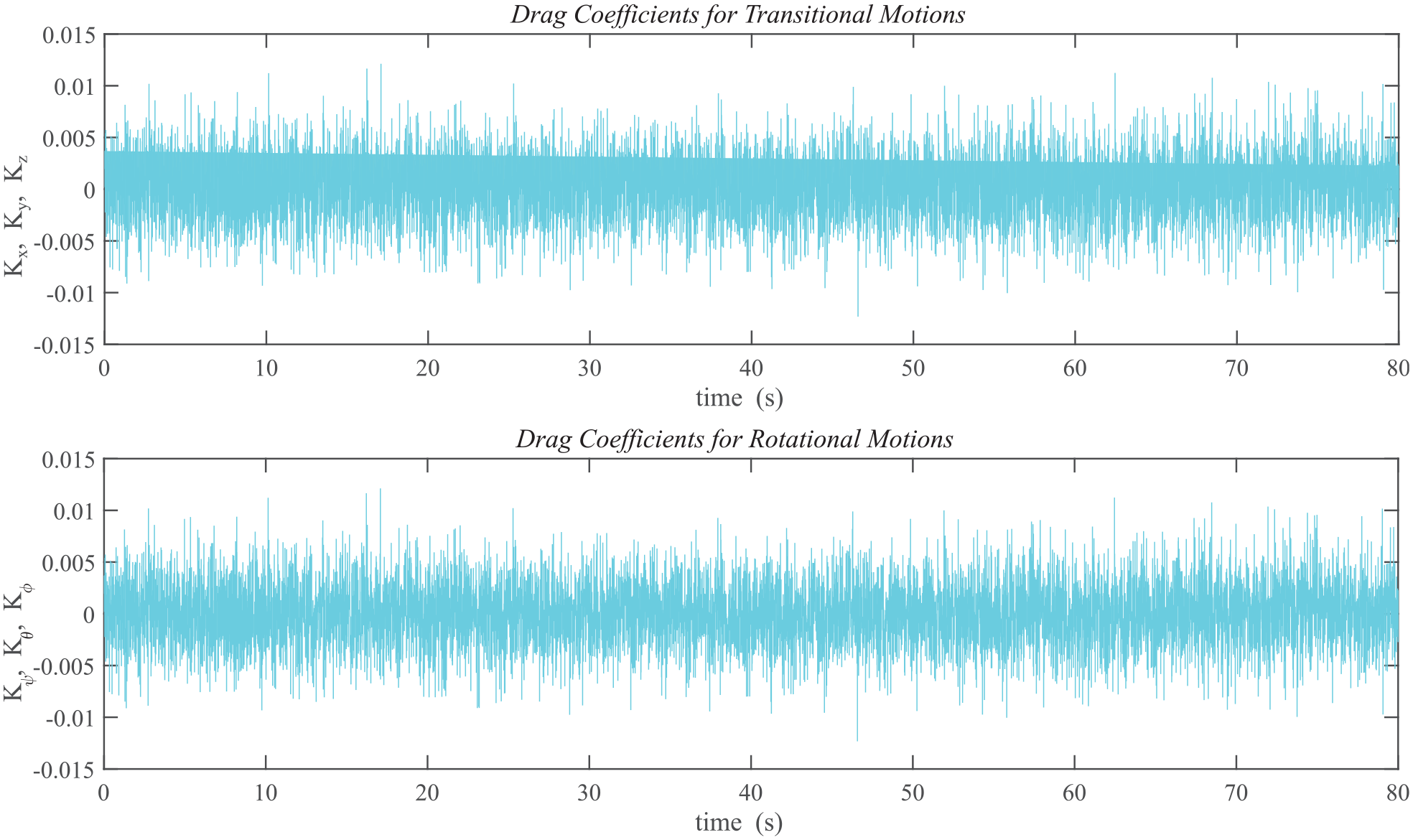
Variation effect of the drag coefficients.
The simulation results are depicted in Figures 6 to 15. As shown in Figures 6 to 9, the proposed control scheme has successfully maintained the attitude and position of the quadrotor in short finite-time. The position and attitude of the quadrotor are affected by abruptly changed flight trajectory. In this context, the proposed ANGSM controller is capable of driving the quadrotor’s state variables back to the new reference angles and position. Moreover, the external disturbances and the variation of the drag coefficients are taken into account the AGNSMC design. Those demonstrate the robustness of the designed controller and the effectiveness of the proposed control scheme. Those show the efficiency of the developed controller and its robustness against the disturbances. The angular and linear velocities, shown in Figures 8 and 9, respectively, depict the same behavior as the angles and positions. It is shown in Figure 10, the proposed controller has archived a good tracking in 3D space in the presence of external disturbances. The input control signals are displayed in Figure 11. It is obvious from Figure 11 these inputs are continuous. The time responses of the quadrotor sliding surfaces are shown in Figures 12 and 13, we can see that all these variables converge to their origins exponentially.

Position tracking of the proposed control design.

Attitude tracking of the proposed control design.

Linear velocity tracking of the proposed control design.

Angular velocity tracking of the proposed control design.
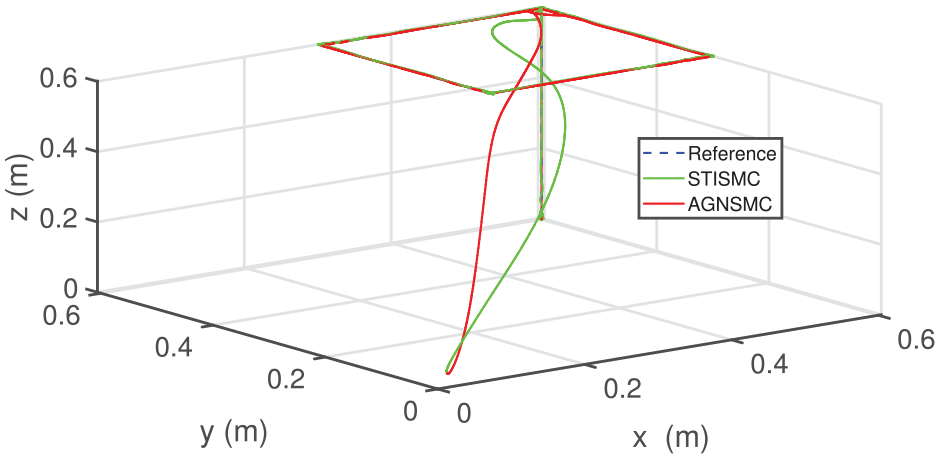
Square trajectory with proposed control design.
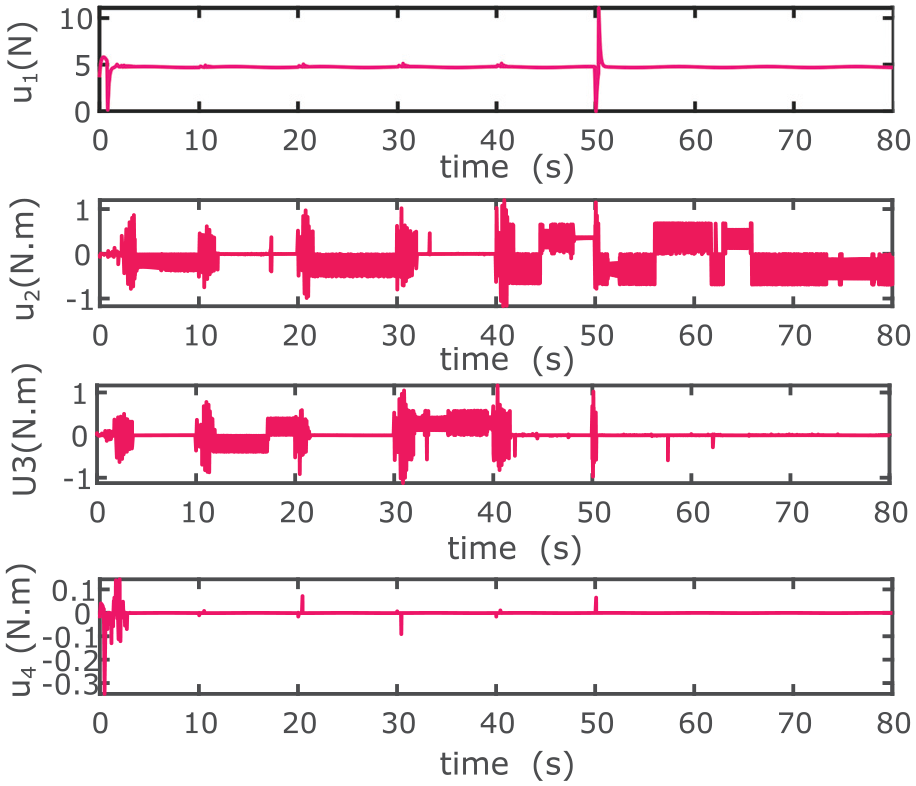
Control inputs.
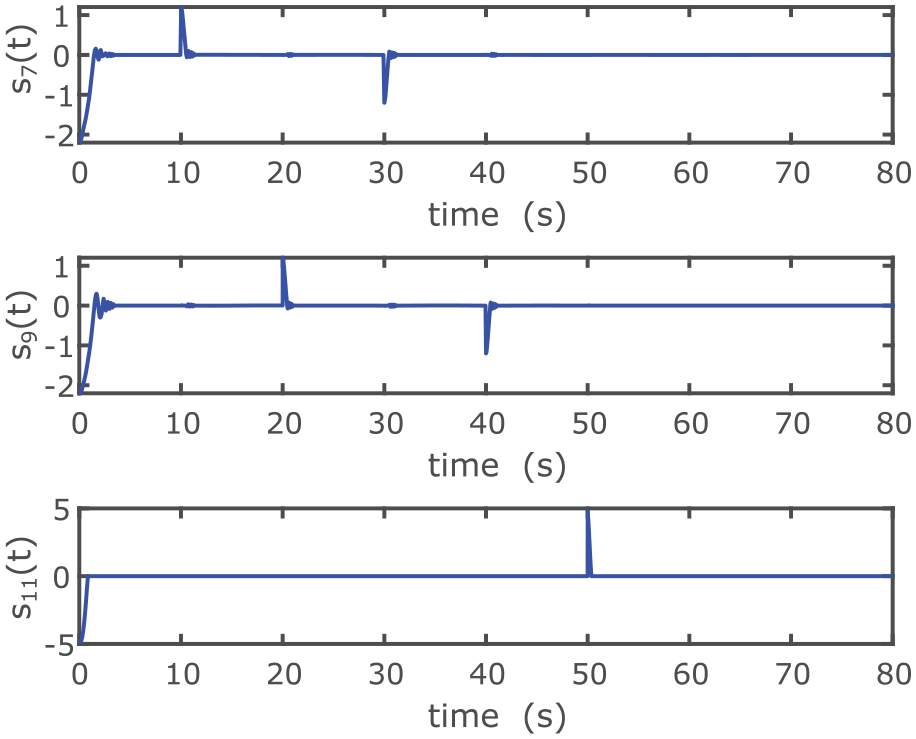
Position nonlinear global sliding surfaces.

Atitude nonlinear global sliding surfaces.

Position parameter estimations.

Attitude parameter estimations.
Finally, the adaptive parameters of the position and attitude with respect to time are illustrated in Figures 14 and 15. It can be seen that these gains converge to their constant values. The proposed controller archives a good tracking of the desired path in the presence of external disturbances.
From the results presented in Figures 6, 7, and 10, the position and attitude trajectories converge to their desired values quickly with a accuracy and achieve efficiently tracking performance in comparison with the control method proposed in Labbadi and Cherkaoui 18 As a result, the proposed controller is validated via these results.
Conclusion
In this work, a novel adaptive global nonlinear SMC method is proposed for tracking control of the mini quadrotor subjected to disturbances and uncertainties. A new global sliding surface is designed for the position/attitude of the quadrotor that both tracking errors converge to the global sliding surface in finite-time. The proposed control scheme guarantees robustness against disturbances and eliminates the reaching interval. The upper bounds of the disturbances are estimated using adaptive law. The presented results confirm the effectiveness of the AGNSM controller.
In future work, the motor dynamics of the quadrotor will be addressed and also random disturbances affected the quadrotor in the difficult condition flight will be considered.
Footnotes
Acknowledgements
The first author would like to thank Editor, Associate Editor, and the anonymous reviewers for their much time and constructive comments to review and improve this paper.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.