
Abstract
To analyze the dynamic responses of vibrator, a vibrator-ground coupling vibration model considering sweep frequency is proposed based on half-space theory, and modal characteristics and phase response of the structure are investigated. Results show that the sweep frequency has a significant effect on the dynamic responses of the vibrator. The natural frequency of the vibrator changes with sweep frequency, and the resonance may occur at 2.071 Hz and 53.12 Hz. The vibrator has two mode shapes. The first-order mode shape is that the reaction mass and the baseplate move in the same direction and the structure is dominated by the reaction mass. At the second-order resonance, the reaction mass and the baseplate move in opposite directions and the baseplate dominates the system. The phase of the vibrator also changes with the frequency and varies greatly. The phases of reaction mass acceleration, baseplate acceleration and ground force suffer abrupt changes at about 2 Hz and 50 Hz. Especially, the phase of the baseplate acceleration experiences a 180° jumping at about 50 Hz. The abrupt change/jumping frequencies of the phase are basically the same as the natural frequencies, indicating that the resonance has significant effect on the vibrator output.
Keywords
Introduction
Seismic vibrator (as shown in Figure 1(a)) has become the most widely employed seismic source in land oil and gas exploration. With the development of oil and gas exploration toward deep, ultra-deep and unconventional reservoirs, higher requirements have been placed on seismic vibrator. 1 High-quality seismic signals are conducive to improving the vertical resolution of the reservoir and to full-waveform seismic inversion,2,3 which are very beneficial for improving the deep imaging quality, especially in special areas such as shale gas.4,5 In order to meet the development of exploration, it is necessary to investigate the dynamic characteristics of the vibrator.

(a) Seismic vibrator, and (b) the structure of vibrator.
The vibrator is the core structure of seismic vibrator and plays a vital role in generating seismic signal. As shown in Figure 1(b), the vibrator consists of reaction mass, baseplate, piston and other auxiliary structures. The piston is firmly installed on the baseplate, and the reaction mass rings on the piston. One upper chamber and one lower chamber are between the piston and the reaction mass. During operating seismic vibrator, high pressure hydraulic oil alternately flows into the lower chamber and the upper chamber, driving the reaction mass to move up and down, and then the seismic signal is transmitted into the ground through the baseplate. As the vibrator is the source of the seismic signal, which attracts lots of researches.
To improve the performance of vibrator, some studies focus on the response of vibrator. Brook and Crew 6 conducted field tests to analyze the baseplate dynamics and found that structural problems could introduce errors in the higher frequencies. Martin and Jack 7 used a down hole string of cemented geophones to monitor the seismic signal generated by vibrator, and found that the vibrator response changed with different force level. Lebedev et al.8,9 proposed an equivalent model to analyze the nonlinear parameters according to harmonic levels. Ley et al. 10 employed a seismic vibrator to investigate the ground viscosity and stiffness, and pointed out that the viscosity of outcrop was different from that of sand. Tinkle and Rowse 11 introduced a simple model to analyze the vibrator performance and suggested that resonance frequencies and damping factors could be obtained from the acceleration signals of reaction mass and baseplate. A thin-film pressure pad was used by Dean et al. 12 to research the pressure distribution between the baseplate and the ground, and they concluded that the interaction between the baseplate and the ground was very complex. Then, Noorlandt and Drijkoningen 13 carried out a field experiment to investigate the interaction between the vibrator and the ground. In 2017, Huang et al.14,15 used finite element method to simulate the vibrator-ground system, and demonstrated that the dynamic responses of vibrator was different from low frequencies to high frequencies. Liu et al. 16 investigated the factors affecting vibration output by establishing a model with static ground stiffness and damping. However, a static model cannot accurately describe the response of the vibrator. Huang et al. 17 optimized the dynamic stiffness of the seismic vibrator with harmonic response model. The results showed that this method can improve natural frequency of the vibrator and reduce the resonance peak. These researches mainly concentrate on the vibrator structure and show that the response of vibrator is very complex under excitation of sweep frequency. At the same time, there are many studies also focusing on the ground force.
The ground force is the force that the vibrator applying on the ground, which is the direct performance indicator of seismic vibrator. In 1984, Sallas 18 expound the weighted sum method to estimate the ground force. In weighted sum method, the ground force is equal to the weighted sum of reaction mass weight and baseplate weight multiplied by their respective accelerations. This method is a practical estimation of ground force and has been widely used in the industry. However, recent researches and field application indicate that the applicability of the weighted sum method exists only in a narrow bandwidth.19–22 So, some new models and methods are developed, but there is no consensus on how to calculate the vibration output more accurately.23–25
The above approaches have carried out a lot of research on the vibrator structure and ground force, providing a very meaningful reference for understanding the seismic vibrator. However, few studies are on the modal characteristics and phase response of the vibrator, and there is also a lack of targeted and reliable model to describe the vibrator-ground system. In this paper, a model considering frequency is developed based on half-space theory and verified, and the modal characteristics and phase response of vibrator under excitation of sweep frequency are studied. This research will provide a reference for a better understanding of vibrator and ground force.
Establishment and validation of vibrator-ground coupling vibration model
Establishment of vibrator-ground coupling vibration model
In seismic survey, the seismic vibrator is used to excite vibration by applying a variable load directly on the ground within a certain period of time. The traditional model of vibrator-ground does not consider the interaction between the baseplate and the ground, as well as the sweep frequency. The baseplate and the ground are modeled separately. Although the static conditions are satisfied, the interaction between the baseplate and the ground is missed. Such method cannot express the true response of the system and reflect the interaction between the baseplate and the ground.
The half-space theory is widely used in civil engineering. The basic assumption of the half-space theory is that the ground is a semi-infinite space body, and the dynamic foundation vibrates on this semi-infinite space body. The mechanics of the ground is characterized by parameters such as elastic modulus and density. The half-space theory can analyze the dynamic contact between the foundation and the ground, as well as the law of the foundation’s vibration. This theory is rigorous in mathematical mechanics which is widely used in the design and verification of foundation vibration.26–28 When analyzing the force of the vibrator applying on the ground, if the structure above the baseplate is ignored, the effect of the baseplate on the ground is consistent with the effect of the dynamic foundation on the ground. According to half-space theory, the baseplate and the reaction mass are treated as rigid bodies, and the ground is assumed as isotropic elastic body.
A vibrator-ground coupling vibration model is established as shown in Figure 2. In this model, mr represents mass of the reaction mass, mb represents mass of the baseplate, Xr represents the displacement of the reaction mass, Xb represents the displacement of the baseplate, Ko represents hydraulic spring, Co represents hydraulic damping, Kz represents equivalent dynamic stiffness between the baseplate and the ground, Cz represents equivalent dynamic damping between the baseplate and the ground, and Q(t) is the hydraulic force. According to force balance, the dynamic equilibrium equations of the reaction mass and the baseplate are written in equations (1a) and (1b), respectively.

Vibrator-ground coupling vibration model.
For the reaction mass:

For the baseplate:

Equation (1) can be written as follows:


Equation (2) can be written into matrix form:

According to the half-space theory, equivalent dynamic stiffness Kz and equivalent dynamic damping Cz are functions of dimensionless frequency a0, and the following relations exist:29,30




where f1 and f2 are the functions of a0; a0 is equal to
So, the ground force can be expressed as:

Validation of vibrator-ground coupling vibration model
To ensure the accuracy of the vibrator-ground coupling vibration model, the comparison of ground forces obtained from vibrator-ground coupling vibration model, weighted sum method, and field test is carried out. The test was conducted on stiff clays with an AHV-IV seismic vibrator, and the ground force was detected by eight load cells. The load cell is a strain sensor which can directly measure the true output of the vibrator. In the field test, the sweep frequency is from 5 Hz to 105 Hz, the sweep length T is 10 s, the hydraulic force is 250,000 N, and 0.5 s cosine taper is applied at start and end of the sweep. The specifications for the model and the test are as shown in Table 1.
Specifications for the vibrator-ground coupling vibration model and the field test.

Figure 3 demonstrates the comparison of ground forces between the three methods. The blue curves are the ground force estimated by weighted sum method. The red curves represent ground force calculated by equation (8). The purple curves are the ground force obtained from the field test. From the perspective of amplitude, before 4 s (or below 45 Hz) the ground forces obtained by the three methods are basically the same. With the increase of sweep time (sweep frequency), the ground forces obtained by the vibrator-ground coupling vibration model and the field test are generally in consistent, which are gradually decreasing, while the weighted sum method overestimates the ground force and its calculation error is getting higher. From the perspective of phase, the ground forces of the model and the field test maintain good synchronization, but the ground force of weighted sum method has a significant phase difference at high frequencies. Compared to Liu’s model, 16 this comparative analysis shows that the vibrator-ground coupling vibration model can more accurately describe the coupling relationship between the vibrator and the ground throughout the sweep frequency and is suitable for analyzing the modal characteristics and phase response of the structure. In the blue box, it is can be observed that there are some harmonic distortion of the test data, which is due to the hydraulic system.
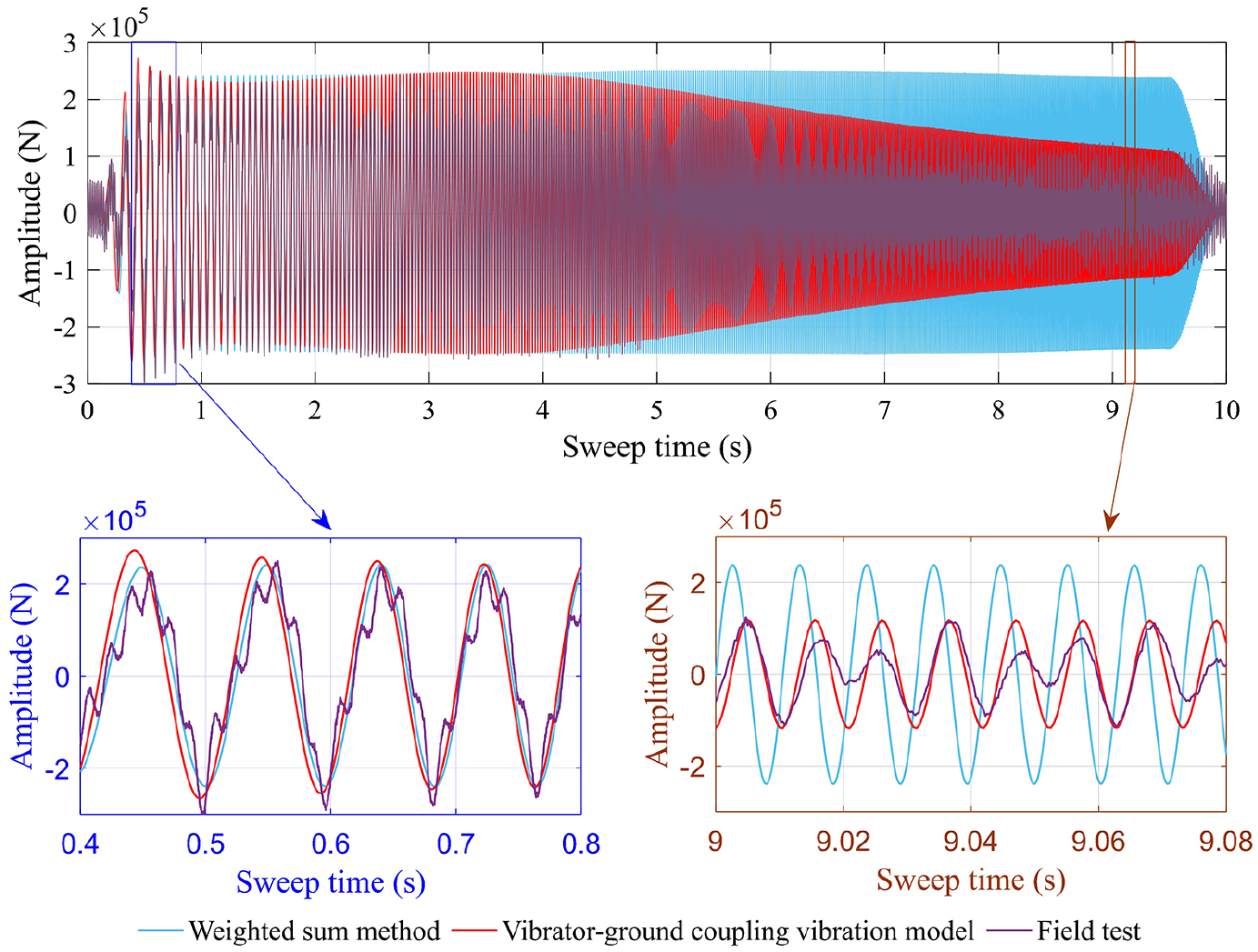
Comparison of ground forces between three methods.
Modal characteristics of the vibrator
Sweep signal
The hydraulic force is also called sweep signal. The amplitude and frequency of sweep signal are both functions of time. 31 The sweep frequency is a linear monotonic function of time and the rate of change of the frequency is constant, and this is why static models cannot reflect dynamic changes in frequency. Equation (9) shows the function of sweep signal.

where A is the hydraulic force amplitude, t is time, Tc is taper time, and W(t) is called cosine taper which protects the vibrator with a smooth process at starting and ending vibrator. Figure 4 shows a sweep signal. Figure 4(a) shows the sweep signal at full sweep and Figure 4(b) shows the sweep signal from 8 s to 8.1 s. In this sweep signal, the sweep frequency is from 5 Hz to 105 Hz, the sweep length T is 10 s, the force level is 250,000 N, and 0.5 s cosine taper is applied at the sweep. Since the sweep frequency increases linearly with time, in this case the sweep frequency is likely to overlap with the natural frequency of the structure, which may cause resonance, affecting the modal characteristics and phase response of the vibrator.

Sweep signal: (a) Full sweep, and (b) local enlarged view.
Analysis of natural frequencies
The modal analysis can determine the main modal characteristics of the vibration system in a frequency range, and make a preliminary judgment on the response of the structure under external force. For the vibrator-ground coupling vibration model, the damping is neither a Rayleigh damping nor a proportional damping, and solving the damped natural frequency is cumbersome and complicated, in addition, the effect of damping on the solution result is very small.32–34 Therefore, in the modal analysis, the vibrator-ground coupling vibration system is considered as an undamped system. Under this consideration, it is not only convenient, but the accuracy of the solution can also meet the requirements. For the undamped free vibration of the vibrator-ground coupling system, its vibration equation can be expressed as:

Assuming the initial conditions are:

then, the solution to equation (11) has the following form (separated variables):

Differentiating equation (12) with time twice, we get:

Substituting equations (12) and (13) into equation (10), it is can be obtained as follow:

Since

or

It can be further written as:

Obviously, Rr = Rb = 0 is the solution satisfying equation (17), but this means that the vibration system is at rest. If vibrations exist, the values of Rr and Rb cannot always be equal to zero. Therefore, the coefficient determinant of equation (17) should be equal to zero, that is:

This is the characteristic equation of the free vibration of the conservative vibrator-ground system. Expanding the determinant, we get:

This is a quadratic algebraic equation for the unknown ω2. Solving equation (19), two real roots of ω2 are as follows:


ω 1 and ω2 correspond to the two natural frequencies of the vibrator-ground coupling vibration system, respectively. For the natural frequency, negative values have no meaning, so both ω1 and ω2 are positive, and ω1≤ω2.
Substituting the parameters in Table 1 into equation (20), the natural frequencies at each sweep frequency can be obtained, as shown in Figure 5. In order to comprehensively analyze the modal characteristics, the sweep frequency is modified from 5–105 Hz to 1–120 Hz. In Figure 5, with the increase of sweep frequency, both two natural frequencies decrease first and then increase. From Figure 5(a), it can be seen that the change of the first-order natural frequency is small, less than 0.01 Hz. Figure 5(b) shows that the change of the second-order natural frequency is much larger than that of the first-order natural frequency, which indicates that the sweep frequency has significant effect on the second-order natural frequency.
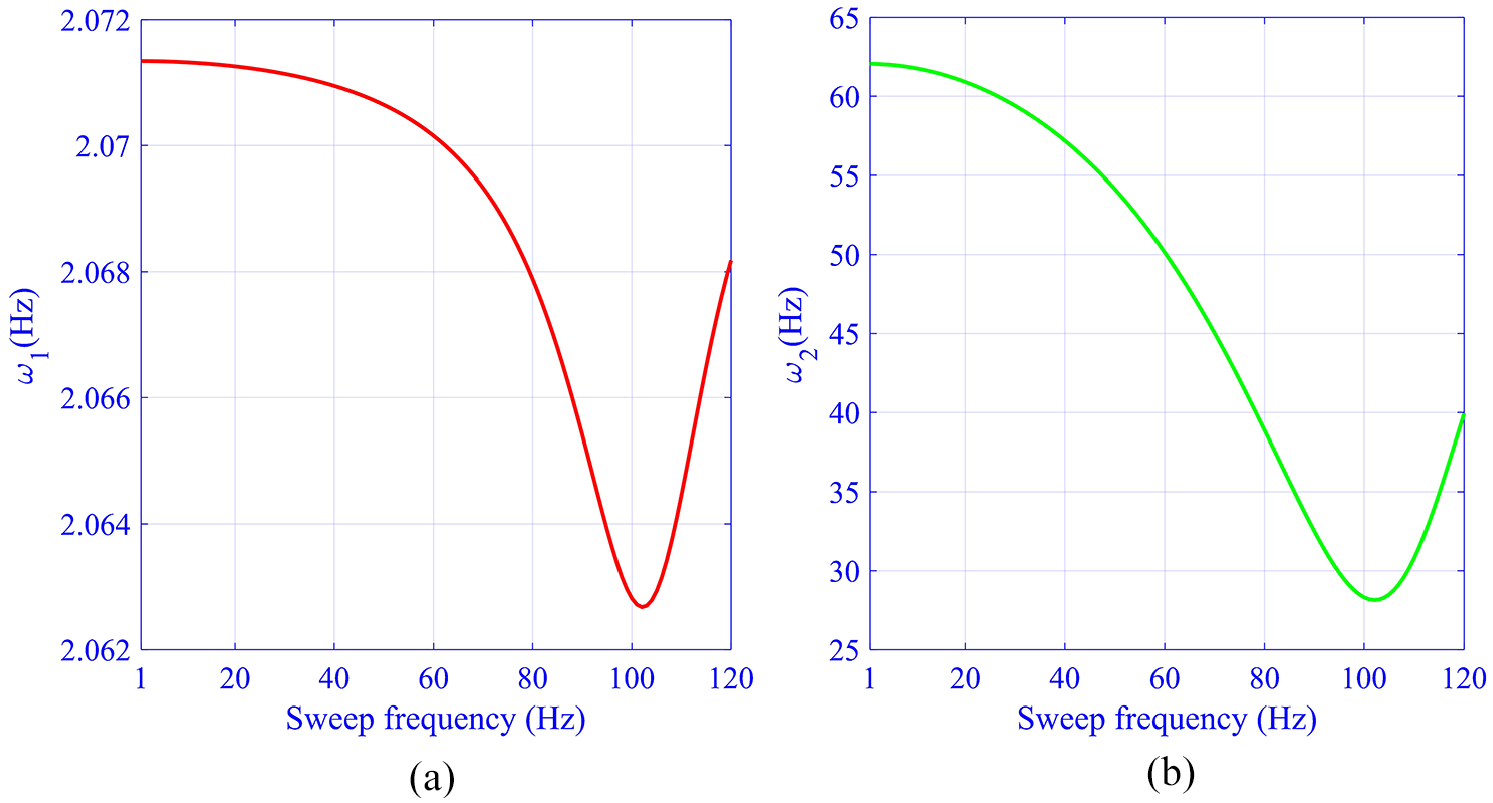
Natural frequencies at each sweep frequency: (a) first order, and (b)second order.
If a resonance occurs in the system, a sweep frequency f must be equal to the resonance frequency ω. Therefore, the natural frequency ω is combined with the auxiliary line f = ω to draw Figure 6. It can be seen from Figure 6 that the auxiliary line and the natural frequency have two intersection points. Point A is the intersection of the auxiliary line and the first-order natural frequency, and point B is the intersection of the auxiliary line and the second-order natural frequency. Point A indicates that the structure may resonate at 2.071 Hz. Point B indicates that the structure may resonate at 53.12 Hz.

Equivalent relationship between the sweep frequency and natural frequencies.
Mode of vibration
If Rb(1) and Rr(1) are the solutions in which ω1 is substituted into equation (17), and Rb(2) and Rr(2) are the solutions in which ω2 is substituted into equation (17), the following solutions can be obtained:


If r1 and r2 are defined as follows:


then, equation (21) can be written as

So the vector

Mathematically, equation (16) represents a generalized eigenvalue problem. ω12 and ω22 are the eigenvalues of the equation. If the corresponding eigenvectors are represented by

Obviously,


The relationship between r1 and r2 and the sweep frequency.
As shown in Figure 7, when the displacement of the baseplate is 1, the displacements of the reaction mass are completely different in the two resonances. At the first-order resonance, the displacement of the reaction mass is hundreds of times larger than that of the baseplate, and the directions of their movements are the same. At the second-order resonance, the displacement of the reaction mass is about thousandths of the baseplate, and the direction of their movements are opposite.
The mode shapes of the reaction mass and the baseplate indicate the vibration tendency of the system when resonance occurs. The vibration modes of the baseplate and the reaction mass are plotted as shown in Figure 8. Figure 8(a) shows the mode shape of the structure at the first-order resonance. The mode shape vector is [465.91, 1]. The motions of the reaction mass and the baseplate are in the same direction, and the motion amplitude of the reaction mass is 465.91 times that of the baseplate. Therefore, in the start-up sweep or low frequencies, the response of the structure is dominated by the reaction mass. Figure 8(b) shows the mode shape of the structure at the second-order resonance. The mode vector is [–0.0015, 1]. The mode shape is that the reaction mass and the baseplate move in opposite directions, and the motion amplitude of the reaction mass is only 0.0015 of the baseplate. So, the response of the baseplate dominates the system. During the seismic exploration, the overlapping of the sweep frequency and the natural frequencies should be avoided as much as possible to prevent the vibrator from resonating, thereby effectively reducing the source-induced interference caused by the resonance deformation.

The mode shapes of the reaction mass and the baseplate: (a) mode shape of first-order and (b) mode shape of second-order.
Phase response of the vibrator
Phase response analysis can not only obtain the response status of each part of the system, but also figure out the response precedence relationship between each element. To analyze the phase response of the vibrator, the phase response of a single frequency is analyzed separately, then each single frequency is aggregated to the sweep bandwidth. The dynamic equilibrium equations of the reaction mass and the baseplate under excitation of a single frequency can be written as follows:


Assuming that the particular solutions to equation (27) for stable motion are as:

so, the velocities of the reaction mass and baseplate are respectively as:

and the accelerations of the reaction mass and baseplate are respectively as:

Substituting Xr,

Solving equation (31), we can obtain:



According to equation (8), the ground force can be written as:
where
So, the phase equation of the ground force (the phase difference between the ground force and the sweep signal) can be expressed as:

The phase equation of the reaction mass acceleration and the phase equation of the baseplate acceleration can be expressed as:

Phase reflects the real-time response relationship between input and output. By substituting the parameters in Table 1 into equations (34) and (35), the phase relationship between the reaction mass acceleration and the sweep frequency, the phase relationship between the baseplate acceleration and the sweep frequency, and the phase relationship between the ground force and the sweep frequency can be obtained, as shown in Figure 9(a) to (c), respectively.
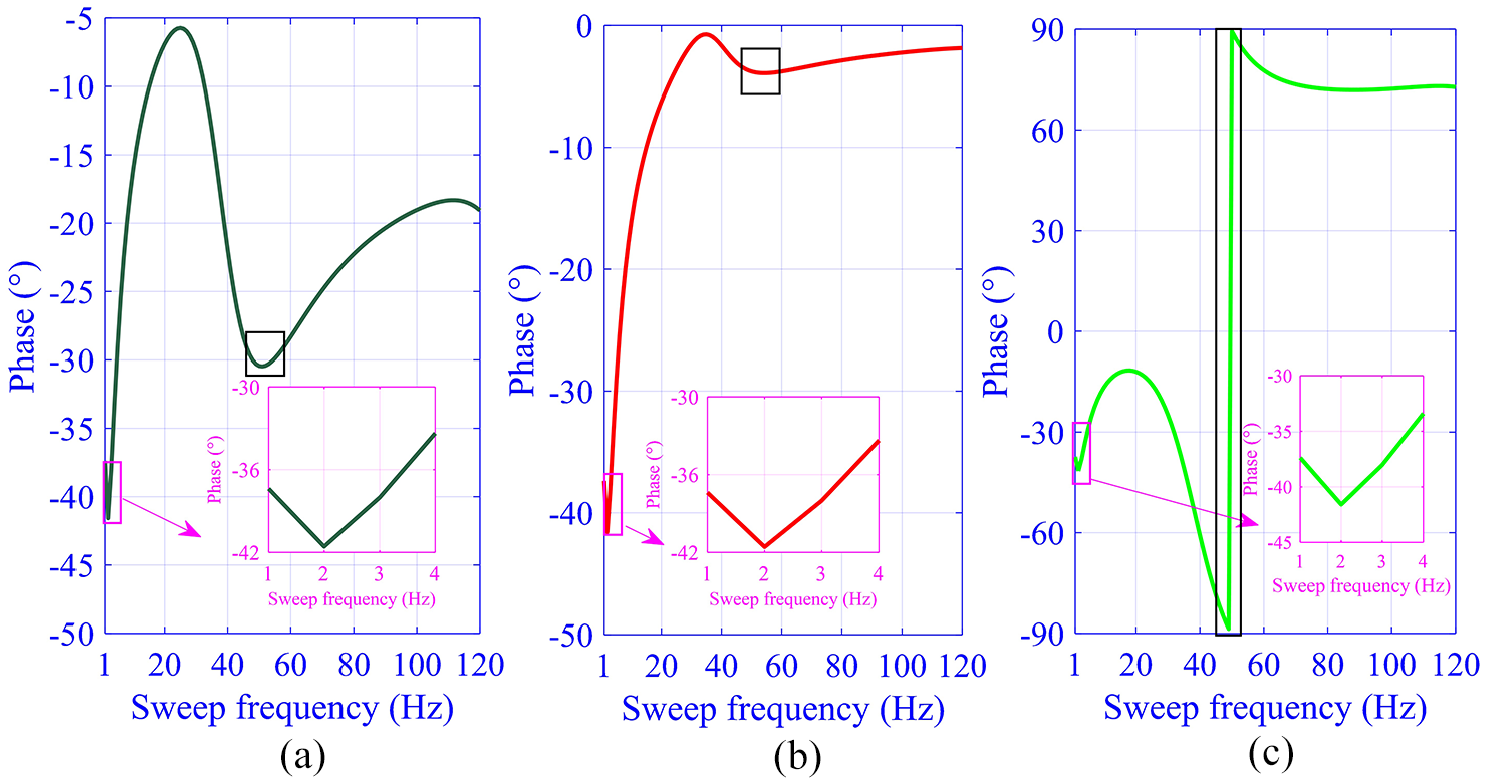
The relationship between phases and sweep frequency: (a) phase of ground force, (b) phase of the reaction mass acceleration, and (c) phase of the baseplate acceleration.
The phase of ground force is shown in Figure 9(a). The ground force phase is lagging behind the sweep signal. As the frequency increases, the ground force phase has one peak at about 26 Hz, and two troughs at about 2 Hz and 50 Hz. As shown in Figure 9(b), the acceleration of the reaction mass is lagging behind the sweep signal. In the band of 1–35 Hz, the phase of the reaction mass acceleration is rapidly decreased. In the band of 35–120 Hz, its phase is first increased and then decreased, but the trend is relatively flat. In Figure 9(c), the phase of the baseplate acceleration decreases first and then increases. Around 50 Hz, a 180° phase jumping occurs.
It is worth noting that, all three phases undergo abrupt changes at about 2 Hz and 50 Hz as the black boxes and magenta boxes respectively show. At about 50 Hz, the phase of the baseplate acceleration changes abruptly by 180°, and after the jumping phase, its phase changes from lag to advance. This is consistent with the results obtained in the field test, except that the jumping frequency has some difference. 35 Both 2 Hz and 50 Hz are very close to the resonant frequencies of the structure. Therefore, resonance is the turning point of structural response which is the key and breakthrough in judging and analyzing vibration.
Although two methods are used, the abrupt change/jumping frequencies of the phase are basically the same as the natural frequencies obtained from the modal analysis, which confirms the correctness and accuracy of the two methods. Besides, the previous papers16,17 didn’t reflect the phase changes at natural frequencies, but our method shows the influence of the resonance on phase response. In the field exploration process, because the sweep frequency does not continue to operate at the natural frequency, so the resonance response may not be very large, or the structure may not have a complete phase change, but the response near the natural frequency is greater than that far away from the natural frequency, and has been verified in field tests.36,37 Ideally, the phase difference between the output and the input is 0°, so that the input and output are consistent in time. However, the actual response is not the case. The phase response of the vibrator is complex and closely related to the frequency. Under the effect of the sweep frequency, the phase of the structure changes with the frequency, and the phase of each structure varies greatly.
Conclusions
In this paper, a vibrator-ground coupling vibration model is established, and the modal characteristics and phase response of vibrator under excitation of sweep frequency are analyzed. Results show that:
A model considering sweep frequency is developed based on the half-space theory, and the comparative analysis shows that this model can accurately describe the coupling relationship between the vibrator and the ground throughout the sweep frequency.
The natural frequency of the vibrator changes as the sweep frequency changes, and resonance may occur at 2.071 Hz and 53.12 Hz.
For the first-order resonance, the motions of the reaction mass and the baseplate are in the same direction, and the structure is dominated by the reaction mass. For the second-order resonance, the reaction mass and the baseplate move in opposite directions, and the baseplate takes the dominating position.
The abrupt change/jumping frequencies in the phase analysis are basically the same as the natural frequencies obtained from the modal analysis. The phases of reaction mass acceleration, baseplate acceleration and ground force suffer abrupt changes at about 2 Hz and 50 Hz, especially the phase of the baseplate acceleration jumps by 180° at about 50 Hz.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (Grant No. 41902326) and China National Petroleum Corporation (Grant Nos. 2018B3401 and 2018E2106).