
Abstract
In the service period, some engineering structures may have cracks or other nonlinear damages. The nonlinear damages are the major influence to the safety of engineering structures, which should be detected as early as possible. Currently, the effective nonlinear damage detection method is still lacking. Therefore, a penalty conversion index based on generalized autoregressive conditional heteroskedasticity (GARCH) model is presented to identify the nonlinear damage. First, an exact expression of GARCH model is described, the bilinear stiffness characteristic of nonlinear damage is given, and acceleration responses are used to establish the GARCH model. Then, through the GARCH model analysis of nonlinear damages responses, it can be found that the variance of conditional variance are sensitive to the nonlinear damage information of acceleration responses, so a basic conversion index based on the variance of conditional variance is proposed. Finally, a penalty conversion index based on GARCH model is presented, which can reduce the interference induced by the adjacent unrelated factors. Numerical and experimental examples show that the identification results of the proposed penalty conversion index based on GARCH model are superior to those of the basic conversion index and the cepstral metric (CM) index.
Introduction
In recent 30 years, vibration-based damage detection has received increasing attention.1–3 The principle of vibration-based damage detection is that structural damage will change the dynamic characteristics of the structure, and the damage information can be acquired from the change of the dynamic characteristics. 4 The time-domain vibration-based damage detection is one effective approach, which can construct a time-domain model and extract the damage characteristic in real time. 5 Das et al. 6 compared four damage detection approaches: time-domain approach, non-probabilistic approach, local diagnostic approach and modal test approach, and they were inclined to the view that the time-domain approach is more reliable than the other approaches in damage detection.
Generally, structural damage can be divided into two categories: linear damage and nonlinear damage. The autoregressive (AR) model, autoregressive exogenous (ARX) model and autoregressive moving average (ARMA) model are effective time-domain models, which can accurately fit the structural response signal caused by linear damage.7–10 Zheng and Mita 11 presented a cepstral distance index between two ARMA models to find structural damage locations. Xing and Mita 12 further improved the cepstral distance index, and deduced the distance function between two AR models, which is more effective than the distance function of ARMA models. The principle of the cepstral distance method is that the method utilizes the distance between the benchmark model and test model to extract the damage information. Mustapha et al. 13 utilized the AR-ARX model and the variation between the residual errors obtained from the intact and damaged states to detect cracking in steel reinforced concrete structures. Liu et al. 14 considered the model coefficient sensitivity to the damage, and utilized the coefficient of time-domain model and Mahalanobis distance to identify structural damage.
In fact, the nonlinear damage such as a crack is more common than the linear damage. The crack makes the structure possess the nonlinear feature with variable stiffness under the time-history excitations. A lot of nonlinear damage detection approaches have been proposed by some researchers,15–17 but it is still lack of the effective research means for damage detection. GARCH model is an effective time-domain model to simulate the nonlinear time signals, which is presented by Bollerslev 18 and has widely used in the economic and financial fields. Pham and Yang 19 firstly employed the combination form of GARCH model and ARMA model to diagnose the mechanical failure using vibration signal. Chen and Yu 20 also utilized the combination form of GARCH model and ARMA model to find the nonlinear damage location of a frame structure and made a comparative study with the linear ARMA model. Yu and Zhu 17 proposed an integration approach based on the time series analysis and response statistical moments to solve the nonlinear damage problem. These methods utilized the combination of GARCH model and ARMA model to diagnose the structural health state. In addition, these methods mainly used the data based on degree of freedom (DOF) to indirectly predict the damage location, which cannot directly point out the damage location. Therefore, a penalty GARCH conversion index is proposed, which is mainly based on GARCH effect of nonlinear responses and can directly identify the inter-storey stiffness damage location.
In this paper, a time-domain nonlinear damage identification index based on GARCH model and penalty function is proposed. First, GARCH model is described, the maximum likelihood approach is utilized to estimate the parameters, and the Akaike information criterion is adopted to determinate the GARCH model order. Then, the nonlinear damage identification principle is studied, a novel index based on GARCH model and penalty function is proposed. Finally, numerical and experimental examples are provided. This paper is organized as follows: Section 1 introduces the research background, Section 2 describes the basic theory of GARCH model, Section 3 proposes a nonlinear damage identification principle based on GARCH model and presents a penalty GARCH conversion index, Sections 4 and 5 provide the numerical and experimental examples, respectively, and Section 6 presents the conclusions.
GARCH model
Basic theory of GARCH model
GARCH model is a time series volatility model, which can use the past variances and errors to predict the current volatility variance. The basic theory of GARCH model 21 is:
If a discrete time series set is {yt} and the information set at time t-1 is ψt-1, the conditional prediction value can be expressed as

The conditional variance

By using the past conditional variances and squared errors, the current conditional variance can be rewritten as:

where p is the order of conditional variances, q is the order of squared errors. Thus, a GARCH (p, q) model is defined. The exact expression of GARCH (p, q) model can be further written as

where


These conditions can ensure that the conditional variances are positive and the covariance is stationary.
GARCH modeling of nonlinear responses
In the service period, a structure may have some damages such as cracks. The opening and closing of cracks make the structural time series responses {yt} possess nonlinear characteristic. In general, the time series responses include linear signals and nonlinear signals. It is necessary to extract nonlinear characteristic from time series responses. Autoregressive model can be utilized to remove the linear information from the time series responses. Thus, nonlinear error information ε t can be retained as follow:

where δ is the constant of autoregressive process, φi is the autoregressive parameter, and k is the autoregressive order. Yule-Walker estimation method 22 is used to obtain the value of autoregressive parameters. The relationship between past conditional variance and error is given as:

where
Parameter estimation
The autoregressive parameters and the GARCH model parameters should be determined. The autoregressive parameters can be obtained by using Yule-Walker estimation method. The parameters of GARCH model can be obtained by using the maximum likelihood function method.
Yule-Walker estimation method is used to obtain the autoregressive parameters. Yule-Walker equation describes the relationship between the autoregressive parameters and the autocorrelation function. The equation can be written as:
where
For the sampling data, the corresponding autocorrelation function can be calculated and estimated. Here,

Then, the parameters of GARCH model can be obtained by using the maximum likelihood function method. Generally, the parameter estimation of GARCH (p,q) model is complicated. In practice, some simplified forms of GARCH model such as GARCH (1,1) or GARCH (0, q) are widely used. The order of GARCH (1,1) has been determined. Therefore, the parameter estimation of GARCH (0, q) is analyzed here, and the maximum likelihood method is utilized to estimate the model parameters. The likelihood function of the model is given by
where θ is the estimated parameter. In general, the marginal distribution of likelihood function is very complicated, and is often omitted. The conditional likelihood function can be written as

Thus, the logarithmic conditional likelihood function is

For the maximum likelihood estimation, the first part of above equation doesn’t include any parameter. Therefore, the first part can be neglected. Equation (12) can be expressed as

For GARCH model, the logarithmic conditional likelihood function includes the current conditional variance vt. According to equation (4), the logarithmic conditional likelihood function should also include the GARCH model parameters. Thus, the logarithmic conditional likelihood function can be written as
The order of GARCH model should also be determined. Akaike information criterion (AIC) is a effective approach to acquire the order of GARCH model, which uses the likelihood function to select the optimum order. The equation of AIC is given by

where L is the likelihood function, m is the number of estimated parameters. Akaike information criterion considers the balance between the likelihood value and the estimated value. In general, we often choose the smaller estimation value which meets the AIC condition.
Nonlinear damage identification basedon GARCH conversion index
Nonlinear damage
Many engineering structures may have crack damage in the service period. Along with the opening and closing of a crack, it makes the structure have variable stiffness nonlinear feature under the vibration load. The stiffness will be lower when the crack is opened than when the crack is closed. Therefore, this kind of nonlinear damage possesses bilinear stiffness characteristic. The bilinear stiffness characteristic will cause the nonlinear response under the vibration load. Thus, the crack can be considered as nonlinear damage of the system. 23 The bilinear stiffness is written as follows:

where
Damage identification based on the basic GARCH conversion index
In general, by comparing the dynamic features in different states, that is, intact state and damaged state, we can detect structural nonlinear damage. The acceleration responses in the intact and damaged states must be acquired from simulation or real experiments. The main steps to establish the basic GARCH conversion index are summarized as follows:
Obtain the acceleration response data in the intact state and damaged state.
By utilizing equation (5), we can extract the residual sequences from the response data, and test the GARCH effects of the residual sequences.
Determine the order of GARCH models and estimate the related parameters. We can utilize the residual sequences
Obtain the conditional variance sequences
Establish the basic GARCH conversion index using the variances
For the time series response data caused by nonlinear damage, the autoregressive process cannot adequately fit the response data, and the residual sequence


where
Penalty GARCH conversion index
Due to the fact that the identification results of the basic GARCH index is not good enough, it is still difficult to accurately judge the damaged state of inter-storey stiffness. Therefore, an improved strategy is presented to enhance the identification accuracy. Considering that the basic GARCH index is easily disturbed by the adjacent unrelated factors, a novel damage index is proposed to reduce the interference of the adjacent unrelated factors. A penalty GARCH conversion index is given as follow:

where η is penalty parameter. The index utilizes a penalty function to reduce the interference induced by the adjacent unrelated factors. This conversion index can also be simply called as penalty GARCH index.
Numerical example
An 8-storey shear building structure depicted in Figure 1 is used to investigate the validity of the proposed method. This structure can be simplified as a structural system with eight DOFs. The system parameters are as follows: the mass of every storey is 100 kg, the lateral stiffness is 1 MN/m, and the Rayleigh damping parameters α and β are 0.9842 Hz and 0.00036 s. We utilize Newmark-β approach to acquire the system acceleration responses. The nonlinear damage in this structure has been introduced by means of the bilinear stiffness method (see equation (15)), which can effectively simulate the breathing crack in columns between two adjacent storeys. 23

Eight-storey shear structure and its simplified system.
The 20% and 30% damage degrees are utilized to verify the validity of the proposed penalty GARCH index. The single damage occurs on the columns between two adjacent storeys in turns, they are called as the “1st-storey damage”, “2nd-storey damage”,…, and “8th-storey damage”. Therefore, there are 16 damage cases, which are shown in Table 1. Here, the “stiffness storey” is used to denote the inter-storey stiffness damage location. White noise is a random signal having equal intensity at different frequencies. In order to make white noise smooth and have similar characteristics as seismic load or wind load, Butterworth filter is utilized to deal with the white noise. This filtered white noise is used as excitation signal, and Newmark-β method 24 is adopted to calculate the structural response. In addition, the disturbance of measurement noise should be also considered in this study. The amplitude of random noise is modified to the same level of structural response, and the modified random noise was added into the acceleration response as the disturbance of measurement noise. Therefore, the acceleration response data with the measured noise can be given by

where
Damaged cases of the eight-storey shear structure.


Acceleration response of eight-storey shear structure in intact State.

Acceleration response of eight-storey shear structure in damaged case 1.
Then, the GARCH effects of the measured acceleration response time series are tested. GARCH (0,q) model is used for damage identification. The maximum likelihood approach is utilized to estimate the model parameter, and Akaike information criterion is employed to calculate the order of GARCH (0,q) model. Here, the acquired model order q is 5. In order to further verify the effectiveness and superiority of the proposed index, a traditional linear damage identification method proposed by Xing and Mita 12 based on AR model and cepstral metric has also been used to identify the nonlinear damage. Given the consistence with the proposed index, the similar strategy is applied to obtain the damage index. Through the normalized cepstral metric, we can also obtain the basic cepstral metric (CM) index, which is similar to the basic GARCH index. Furthermore, we can also obtain the penalty CM index, which is similar to the penalty GARCH index.
Considering 20% reduction in the stiffness, single damage occurs from the 1st storey to the 8th storey. So, there are eight damage scenarios. Here, the basic CM index, basic GARCH index, penalty CM index and penalty GARCH index are used for damage identification. These indexes can directly point out damage location. The identification results of the eight damage scenarios with damage degree 20% are depicted in Figures 4 and 5. From Figures 4 and 5, it can be seen that the two damage indexes based on GARCH model can find the damage location, but the other two indexes based on cepstral metric are not good enough. Due to the fact that the structural dynamic responses contain nonlinear information, GARCH model can effectively solve the nonlinear problem. In addition, the calculated results of the penalty GARCH index are superior to those of the basic GARCH index. For example, the basic GARCH index couldn’t entirely identify the 1st-storey damage, but the penalty GARCH index can perfectly find the 1st-storey damage location. The reason is that the penalty GARCH index reduces the interference of the adjacent unrelated factors.

Identification results for the 1st-storey to 4th-storey damage with 20% stiffness reduction.

Identification results for the 5th-storey to 8th-storey damage with 20% stiffness reduction.
A total of 30% reduction in the stiffness is also considered. Single damage occurs from the 1st storey to the 8th storey. There are also eight damage scenarios. The basic CM index, basic GARCH index, penalty CM index and penalty GARCH index are used to identify the nonlinear damage again. The identification results of the eight damage scenarios with damage degree 30% are shown in Figures 6 and 7. From Figures 6 and 7, it can be seen that the two damage indexes based on GARCH model can find the damage location, but the other two indexes based on cepstral metric are still not good enough. In addition, the calculated results of the penalty GARCH index are superior to those of the basic GARCH index. Therefore, the penalty GARCH index is still the best among the four damage indexes.

Identification results for the 1st-storey to 4th-storey damage with 30% stiffness reduction.

Identification results for the 5th-storey to 8th-storey damage with 30% stiffness reduction.
Experimental example
In order to further verify the effectiveness of the penalty GARCH index for actual structure, a three-storey frame experiment has been employed, which is provided by LANL USA. 25 The frame structure with sensors is depicted in Figure 8. The frame is made up of aluminum plates and columns assembled using the bolted joints. The frame can slide on rails along the x-direction. At each storey, the aluminum plates (size: 30.5×30.5×2.5 cm) are connected by four aluminum columns (size: 17.7×2.5×0.6 cm). Nonlinear damage is modeled by a mechanism constituted of a center column and a bumper, and the center column is suspended from the top storey, which is utilized to induce nonlinear behaviors when it contacts the bumper assembled on the second storey. This mechanism is used to simulate the opening or closing of a crack under the dynamic loadings. The gap distance between the bumper and the center column can be adjusted. The greater the gap distance is, the weaker the nonlinear damage becomes.

Three-storey experiment structure: (a) three-storey frame structure and shaker and (b) suspended column and bumper.
The direction of acceleration measured by accelerometers is perpendicular to column axes. The accelerometers (four channels) are mounted at the center line of each floor on the opposite side of the excitation source. Load is applied by means of an electrodynamic shaker to the base floor along the center line of the frame. A band-limited random exciting force in the range of 20–150 Hz is used to excite the structure. This excitation signal is chosen in order to avoid the rigid body modes of the structure that are present below 20 Hz. The sampling frequency is 320 Hz. Accelerometers are installed at the center of each floor. The acceleration response data at all the floors, including the ground floor, have been recorded. The sensor channel settings and some parameters are shown in Table 2. The acceleration response data of the 1st-storey, 2nd-storey and 3rd-storey of the frame is the measurement data of the channels 3, 4 and 5. The damaged states are shown in Table 3. The damaged states can be divided into two categories, those which don’t have model error and those which have model error. The damaged states 1–5 didn’t consider the effects of model error but the damaged states 6–7 considered the effects of model error through an additional mass. The larger the gap is, the weaker the degree of nonlinear damage becomes. The acceleration response time series of the intact state are the linear signals, the sample data is shown in Figure 9. The acceleration response time series of the damaged state 1 are the nonlinear signals, the sample data is shown in Figure 10. The touch between the center column and the bumper makes the acceleration response possess nonlinear characteristic. We can observe that their acceleration curve outlines are apparently different.
Sensor channel settings and parameters.

Damaged states of the experimental structure.


Acceleration response time histories in intact state.

Acceleration response time histories in damaged state 1.
Then, GARCH (0,q) model was used for damage identification. The maximum likelihood approach is utilized to estimate the model parameter, and Akaike information criterion is employed to calculate the order of GARCH model. Using the damaged state 1 as an example, the relationship of AIC and order q of Channels 3–5 is shown in Figure 11. Based on the balance of simplicity and accuracy, 5 has been chosen as the optimal order. Thus, the obtained order q is 5. The model order of the other damaged states can be similarly determined. The GARCH (0,5) model is fit to the damaged states through test. In order to further illustrate the effectiveness and superiority of the proposed index, the traditional linear model method, which was proposed by Xing and Mita 12 has also been used to identify the nonlinear damage. Through the normalized cepstral metric of AR model, we can obtain the two indexes, that is, the basic CM index and penalty CM index, which are similar to the basic GARCH index and penalty GARCH index, respectively.

Relationship of AIC and order q of channel 3–5 in damaged state 1.
Damage identification with measurement error
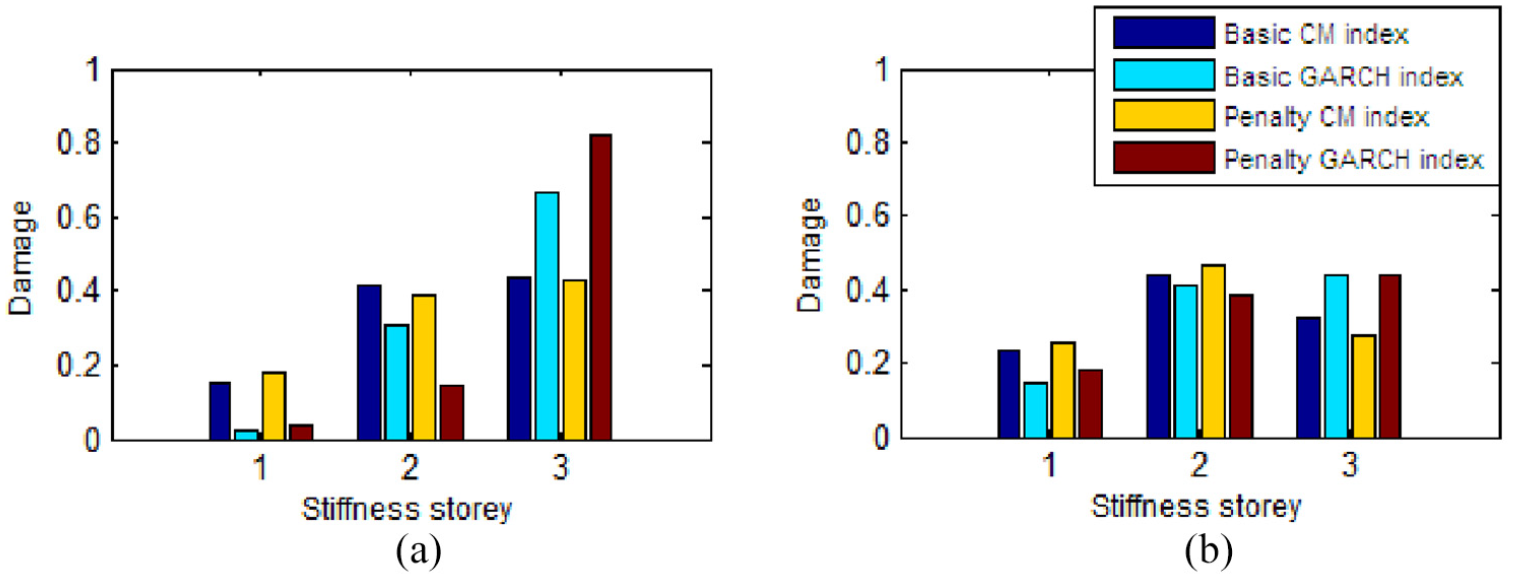
For the damaged states 1–5, the acceleration response signals mainly are disturbed by measurement error. The nonlinear damage is located in the third stiffness storey. The basic CM index, basic GARCH index, penalty CM index and penalty GARCH index are utilized to identify the nonlinear damage location. The identification results for damaged state 1 are shown in Figure 12(a). From Figure 12(a), we can see that the four indexes can all find the damage location but the results of the two GARCH indexes are superior to those of the two CM indexes. The reason is that GARCH model can effectively deal with nonlinear signals. The two GARCH indexes have relatively higher values for the third stiffness storey. In addition, the calculated value of the penalty GARCH index is greater than that of the basic GARCH index for the third stiffness storey. Therefore, the penalty GARCH index is the best one among the four damage indexes.

Nonlinear damage identification results from the damaged states: (a) state 1, (b) state 2, (c) state 3, (d) state 4, and (e) state 5.
For damaged states 2–4, the identification results are depicted in Figures 12(b)–(d). From Figures 12(b)–(d), we can see that the calculated value of penalty GARCH index is apparently greater than those of the other three indexes for the third stiffness storey. Of course, the basic CM index, basic GARCH index and penalty CM index can also identify the damage location, but the penalty GARCH index are obviously superior to the other three indexes.
In general, the larger the gap is, the weaker the degree of nonlinear damage becomes. So, the damaged state 5 is also a weak nonlinearity problem. The damage identification results for damaged state 5 are shown in Figure 12(e). For weak nonlinearity problem, the nonlinear identification results of the basic CM index, basic GARCH index and penalty CM index are not very good, but the results of the penalty GARCH index are apparently better than those of the other three indexes. The value of the damaged third stiffness storey is obviously greater than those of the undamaged stiffness storey for the penalty GARCH index. Therefore, the penalty GARCH index can solve the weak nonlinearity damage problem.
Damage identification with measurement error and model error
For the damaged states 6-7, the states considered the effects of both model error and measurement error. An additional mass is attached in the structure to simulate model error. The nonlinear damage is located in the third stiffness storey. The basic CM index, basic GARCH index, penalty CM index and penalty GARCH index are utilized to locate the nonlinear damage. The identification results for the damaged state 6 are shown in Figure 13(a). From Figure 13(a), it can be seen that the two damage indexes based on GARCH effect can find the damage location, but the other two indexes based on cepstral metric easily lead to misjudgment for damage location. Due to the fact that the structural dynamic responses contain nonlinear information, the damage indexes based on GARCH model have relatively higher values for the third stiffness storey. Moreover, the calculated value of the penalty GARCH index is higher than that of the basic GARCH index. Therefore, the proposed penalty GARCH index is the best one among the four damage indexes.
Nonlinear damage identification results from the damaged states: (a) state 6 and (b) state 7.
The damaged state 7 is a weak nonlinearity damage problem. The damaged state considered the influence of both measurement error and model error. The damage identification results are depicted in Figure 13(b). From Figure 13(b), it can be seen that neither the basic CM index nor the penalty CM index can find the nonlinear damage location. The basic GARCH index and penalty GARCH index exhibit better performance than the two CM indexes do. Two GARCH indexes can approximately find the nonlinear damage location.
From the simulation and experiment, for the nonlinear damage identification with measurement error, the basic CM index, basic GARCH index, penalty CM index and penalty GARCH index have the capacity of identifying the nonlinear damage. The identification results of two GARCH indexes are superior to those of the CM indexes. The reason is that the basic CM index and penalty CM index are based on linear AR model and cepstral metric. Although the cepstral metric can improve the identification results, the two CM indexes are more suitable for linear damage problem. In addition, the detection results of the penalty GARCH index are superior to those of the basic GARCH index. Therefore, the penalty GARCH index is the best among the four indexes. For the nonlinear damage problem with both measurement error and model error, the basic CM index and penalty CM index couldn’t solve the weak nonlinearity problem, but the penalty GARCH index can effectively solve the weak nonlinearity problem and identify the damage location. The penalty GARCH index needs the measured data of the intact state. However, in some cases, it is difficult to acquire the measured data of the intact state, which limits the application of this approach.
Conclusions
In this study, a damage identification approach based on the penalty GARCH conversion index has been proposed to solve nonlinear damage problem. First, the basic theory of GARCH model is described, and the parameter estimation and order determination methods of GARCH model are proposed. Then, the bilinear stiffness characteristic of nonlinear damage is analyzed, and the nonlinear damage identification principle based on GARCH model is provided. Finally, the penalty GARCH index is presented to improve the identification accuracy. By considering the results of simulation and experiment, we can draw the following conclusions: (1) For the nonlinear damage problem with measurement error, the identification results of the penalty GARCH index are obviously superior to the other three indexes, that is, the basic CM index, basic GARCH index and penalty CM index. (2) For the nonlinear damage problem with both measurement error and model error, neither the basic CM index nor the penalty CM index can identify the weak nonlinearity damage, but the penalty GARCH indexes can approximately find damage location. In summary, the penalty GARCH index shows good performance and high identification accuracy. Of course, for complex spatial structures, the effectiveness of the proposed method should be further studied. In ation, the proposed method needs the measured data of the intact state, which limits the application of this method. Therefore, the damage detection method based only on the measured data of the damaged state should also be explored.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key R&D Program of China (Grant No. 2018YFC0809400).
Data availability
The data used to support the findings of this study are available from the corresponding author upon request.