
Abstract
In response to the requirement for population increase, the cross-section area of the urban subway is enlarged, resulting in that one-time excavation technology cannot be directly applied to the excavation of large-section tunnels. Consequently, how to partition the cross-section of the large-section tunnels and optimize the corresponding construction parameters is of great significance. In this paper, we establish a unified planar partition optimization model based on the four parameters of the number of horizontal layers, the number of transverse partitions, the height of the step, and the width of sections. Moreover, using the dynamic programming principle, we can further obtain the optimal excavation sequence and the construction parameters of the large-section tunnels by solving the planar partition optimization model. Combined with the case of an extra-large cross-section tunnel excavation of Chongqing Metro Central Park East Station, the paper optimizes the excavation method of the tunnel with the aim of the maximum construction efficiency and tunnel stability to obtain the optimal excavation sequence, the optimal construction parameters, and the optimal comprehensive evaluation index. The practice has proved that the optimization model based on the dynamic programming principle can effectively solve the problem of large-section tunnel construction. The case analysis can provide an effective reference for similar large-section tunnel projects.
Introduction
Subway has many advantages for urben transportation, such as large capacity, fast, convenient, comfortable, safety, punctuality, low energy consumption and no interference with ground traffic, etc. Now it has gradually become an important way to solve the problem of urban traffic congestion. However, the types of underground stations are becoming more and more complex. 1
The construction method of urban subway station is affected by ground construction, urban traffic, environmental protection and other aspects.. Compared with ordinary tunnel and bridge engineering, the construction method of urban subway station has higher technical requirements and more difficulty. 2 There are also a variety of construction methods, including open excavation, cover excavation, and so on. Underground excavation can reduce earth and stone excavation, avoid a large number of demolition and relocation work, avoid underground pipelines, bridge piles, building pile foundation and other underground structures, and have little impact on ground traffic.
However, the cross-section type of underground station is more complex than that of interval tunnel, the size of cross-section size is much larger, the structure stress is also more complex, the construction of underdround station will also be affected by the method of cross-section construction. 3 Therefore, how to design scientifically, safely, reasonably and economically becomes a key issue.
According to the standards of the International Tunneling Association and practical engineering experience, we call the tunnel, with a cross-section area greater than 100 square meters, a super large-section tunnel. The standard of the International Tunneling Association is shown in Table 1.
Section size standard (ITA).

Large cross-section tunnel is characterized by large excavation area, generally more than 100 square meters.. At the same time, it is accompanied by a series of factors, such as complex engineering geological conditions, special construction methods, many engineering measures, complex supporting measures, complex construction mechanical properties, and high requirements for construction period and cost. 2 Therefore, the problems caused by large section tunnel in actual production problems appear to be particularly prominent.
With the rapid development of subway and high-speed railway construction in China, a large number of large-section tunnels have been designed and built in recent years. 4 The construction of large-section tunnels began in the late 1990s, such as the Dageshan highway tunnel in Kaili city, Guizhou province, and it was completed in 2001. The Liuyang river tunnel5,6 and Jinshajiang tunnel 7 of Wuhan-Guangzhou high-speed railway are well known. For the urban subway, the western cities of China use more and more large-section tunnels as subway stations, such as many subway stations in Chongqing adopt large-section tunnels in their design and construction.8,9
In recent years, many investigators and constructors have proposed several construction methods for construction of large-section tunnels. Cheng Chongguo and Cheng Zhipeng10,11 have proposed a construction method based on the large-section underground station tunnel in Chongqing. They have mainly studied the construction mechanical characteristics and the corresponding control measures of the large-section tunnel through comparison and selection of multiple schemes. The constructors of China Railway Tunnel Group Co., Ltd. 12 have published a paper, which is based on the super-large cross-section tunnel project of Linjiangmen station in Chongqing. Gao Jun and Hu Guowei 13 have systematically studied the deformation and deformation monitoring of the large-section tunnel under construction; analyzed the change rules of land subsidence, surface subsidence, and vault subsidence; and then proposed the corresponding support and reinforcement measures. Based on the analysis and comparison of various excavation methods of extra-large cross-section urban tunnel, Refs.14,15 have presented an optimal construction scheme using a bilateral tunneling method while they employed a variety of monitoring measurements to dynamically manage the whole construction process, ensuring the construction safety of extra-large cross-section tunnel.14,15
Due to the large span and height of the large cross-section tunnel, the primary support and secondary lining structure will bear greater surrounding rock pressure after the tunnel is excavated. The resulting stress field and displacement field of surrounding rock are also relatively complex, and the stress on the supporting structure is correspondingly complex. In addition, during the construction of large section tunnel, multiple working procedures interact with each other, and the application of front and rear support measures is complex, which disturbs the surrounding rock, so how to choose the construction sequence and analyze the construction parameters are particularly important.
At present, the construction company has strengthened the construction management of large section tunnel, and adopted better construction methods and better construction parameters. In addition, they adopted more suitable for large section tunnel to ensure the stability of surrounding rock and the safety of tunnel structure. At the same time, they also need to reduce the construction cost, while ensuring the stability of the surrounding rock and structure during the tunnel construction, constantly improve the construction efficiency and save the construction cost. Therefore, selecting reasonable construction methods and appropriate construction parameters, optimizing construction technology, ensuring safety in the construction process and improving construction efficiency are very important to solve the construction problems of large cross-section tunnel.
In general, most of the previous studies mainly focus on the specific tunnel cases and their corresponding deformation law and control technology. Therefore, these studies do not systematically consider the construction mechanical characteristics and optimization of the construction method of the large-section tunnels, which have a complex construction process and obvious spatial effect. Moreover, there is a lack of theoretical analysis and support for the design and construction in the engineering practice. To solve the above problems, the paper studies optimization of the excavation method for large-section urban subway tunnel via a case analysis.
Optimization analysis of excavation section
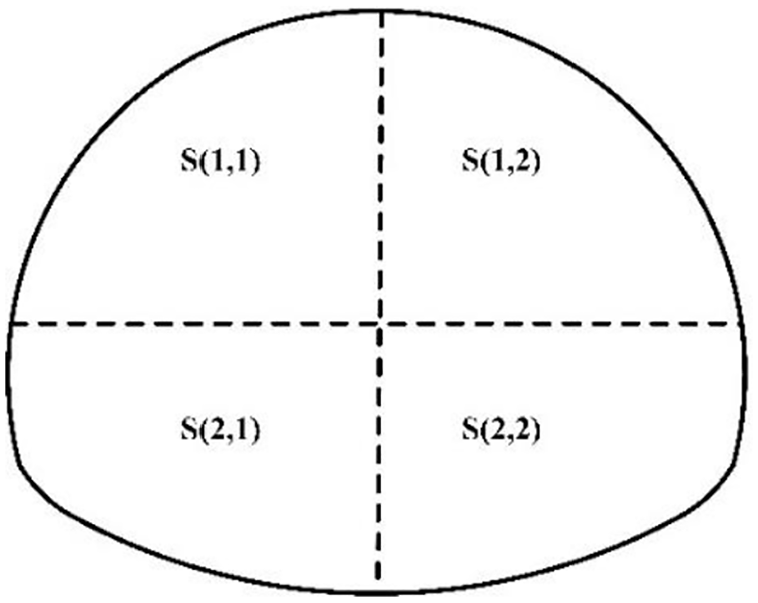
When the cross-section area of the tunnel is large, we need to divide it into several sections and then excavate them separately. The optimization model of horizontal layers can be expressed as fx = f(i, h), where i is the number of level layers, h is the height of steps. At present, the tunnel stability and construction efficiency are balanced by constant adjustment of parameters i and h. Similarly, the optimization model of transverse blocks can be written as fy = f(j,w), where j is the number of horizontal blocks and w is the width of the blocks. Therefore, the tunnel stability and construction efficiency are determined by adjusting the parameters j and w. As shown in Figure 1, we can obtain the planar partition model by combining fx = f(i, h) and fy = f(j, w).

Sequential partition of planar excavation fxy= f[(i, h),(j, w)].
The formula fxy= f[(i, h),(j, w)] is the theoretical model of the excavation scheme of the transverse block, where i represents the number of horizontal layers and h represents the set of heights of various steps corresponding to h1 to hi. In addition, Σ hi = H represents the height of tunnel section, j represents the number of transverse blocks, w represents the set of various widths of blocks corresponding to w1 to wj, and Σwj= W represents the width of the tunnel section. In Figure 1, i and j determine the number of horizontal and vertical direction splits. Accordingly, h and w are the horizontal and vertical length parameters at S(i, j), thus it determines the size of each block. Therefore, for each S(i, j) block change, the size of each excavation small section will also change accordingly. Therefore, in the optimization process of large section tunnel, only block parameters i, j and the corresponding dimension parameters H and W of each S(i, j) need to be adapted. At the same time, the construction stability is considered comprehensively, so as to select the most appropriate construction parameters.
We can also sum up the construction methods used in practical projects as a planar partition model, such as the double-side-drift method. As shown in Figure 2, the double-side-drift method divides the cross-section into four sections for excavation. The section labeled 1 in the figure represents the left and right heading, the section labeled 2 represents the upper step, and the section labeled 3 represents the lower core soil.

Sketch of the double-side-drift method.
Besides, the Center Diaphragm (CD) method and the Center Cross Diagram (CRD) method, as shown in Figures 3 and 4, divide the cross-section into six sections for excavation. In the case of i = 3 and j = 2, the whole cross-section of the tunnel consists of three layers in the horizontal direction and two in the transverse direction. The CD method divides the cross-section of the tunnel into two transverse blocks, each of which has three horizontal layers. The method labels the left side as section 1, section 2, and section 3, and then it labels the right side as section 4, section 5, and section 6. During the construction, these sections are respectively excavated in a certain sequence to achieve a full-section excavation.

Sketch of CD methods.

Sketch of CRD methods.
The optimization of the actual construction scheme only needs to determine four main parameters of the planar partition optimization model (i.e. the number of level layers, the height of steps, the number of horizontal blocks, and the width of blocks). Based on the determined parameters, some schemes of the planar partition optimization model can be finally determined. In optimizing decision analysis, we can obtain the optimal scheme only by comparing and selecting these schemes.
Optimization based on Dynamic Programming Methods
Dynamic Programming is a branch of operations research and a mathematical method to solve the optimization of the Decision Process. In the early 1950 s American mathematician R.E.B ellman and others studied the multi-stage decision-making Process (Multistep Decision Process), 16 they put forward the famous optimization Principle, which transformed the multi-stage Process into a series of single phase problems, and solved them one by one by making use of the relationship between each stage, and established a new method to solve this kind of process optimization problem-dynamic programming.
In the tunnel construction, the whole tunnel construction process can be divided into several interrelated construction stages, that is, the construction step, because there are several construction processes and each construction process is successively related one after another. In each stage, corresponding decisions should be made, which measures should be taken in the next stage, and how to carry out excavation and support should be decided, so as to achieve the best excavation and support effect and economic effect in the whole process. Therefore, the decision selection of construction steps in each stage cannot be arbitrarily determined. This depends on the current construction status, which will affect the excavation and support status after the construction status. When the decision of each stage is made, what measures will be taken in the next construction step will constitute a decision sequence of tunnel construction, so it also determines the implementation route of the excavation and support procedure in the whole tunnel construction process. This kind of multi-stage decision-making process is called the optimization problem of multi-stage decision-making in tunnel construction.
In 1951, according to the characteristics of a class of multi-stage problems, R. Ellman et al., an American mathematician, transformed the multi-stage decision problems into a series of interrelated single-stage problems, and then solved them one by one. 16 For the partial excavation of large section tunnel, the optimization problem of tunnel construction method can be reduced to a multi-stage dynamic model through the secondary division of tunnel section and before and after the construction process, and the dynamic programming method can be used to deal with the problem. The optimal decision of a process has the property that the substrategy of an optimal strategy must also be optimal for its initial and final states.
Therefore, optimization principle is used to describe the optimization problem of the construction method of large section tunnel. In order to achieve the optimal goal of minimum deformation and highest construction efficiency when the tunnel construction is finally completed, n decisions need to be made in each construction division and construction sequence X1, X2…, Xn, and then proceed to the next construction link. If the decision sequence is optimal, for any integer k,1<k<n, no matter what the previous k decisions are, the optimal decision in the future only depends on the current state determined by the previous decision, that is, the future decision Xk+1, Xk+2…Xn is also optimal. 17 Optimization principle is the foundation of dynamic programming. Without the support of this optimization principle, it is impossible to use the dynamic programming method to optimize the construction method of large section tunnel.
The optimization problem of tunnel excavation dealt with by dynamic programming is a multi-stage decision problem, which generally starts from the initial state, and finally reaches the end state through many intermediate decisions of construction step selection in the intermediate stage. These decisions form a decision sequence and define an activity path to complete the whole process. The optimization of tunnel excavation by dynamic programming should follow this pattern and generally go through the following steps.17–21
Stage division: According to the time and space characteristics of tunnel engineering excavation, the tunnel engineering excavation is divided into several stages according to the secondary division of section or construction procedure. When dividing the stages, it should be noted that the divided stages must be ordered or sequenced. Otherwise, it is impossible to solve the optimization problem of tunnel engineering excavation by using dynamic programming theory.
Determine the state and state variables: Various objective conditions of tunnel excavation optimization problems developed to different stages are expressed by different states, such as stress field and displacement field of surrounding rock. The choice of state should satisfy no aftereffect.
Determine the decisions and write the equation of state: Due to the various decision-making processes and results of the optimization problems of tunnel excavation, such as stress field, displacement field, etc., there is a natural relationship between the state transfer and the next stage. The state transfer determines the state of the output stage based on the state of a certain stage.
Search for boundary conditions: A boundary will be finally reached through the decision making and the result recursion brought by the decision making before and after, which makes the dynamic programming process come to an end. For the excavation problem of tunnel engineering, it is a natural boundary condition until all the tunnels have been excavated.
Program design and implementation: For the optimization problem of tunnel engineering excavation, the control program can be written to realize automatic control dynamic programming solution.
Through the analysis of the above basic principles, this method can be used to optimize the excavation of large section tunnel. An example is given to illustrate how the excavation optimization is achieved step by step.
In optimizing the excavation method using the planar partition optimization model, we divide the cross-section of the tunnel into S(i, j) planar sections in terms of horizontal stratification and horizontal block to realize the planar partition. In the case of i = 2 and j = 2, the cross-section of the tunnel is divided into four planar partitions, as shown in Figure 5. The dynamic programming principle (DPP) can effectively solve the problem of multi-stage decision-making optimization of the excavation of the large-section tunnel. From the perspective of DPP, we use the following plane with four sections to analyze the optimization problem of the excavation of the large-section tunnel.
Planar partition model in the case of i = 2 and j = 2.
Figure 5 shows that a large-section tunnel is divided into four sections to realize the four-step sequential excavation from top to bottom. Here, the four sections are S(1,1), S(2,1), S(2,1), and S(2,2). Assuming that each section is excavated in a top-down sequence and each excavation step corresponds to a section, we need to select an optimal excavation path, that is, the comprehensive evaluation index is optimal. Therefore, we establish the dynamic programming analysis model of four sections in the plane of the large-section tunnel.
We divide the tunnel excavation into several stages until it completes and regard each excavation partition as a stage in the process of the whole tunnel excavation. Figure 5 shows that the cross-section of the tunnel consists of four sections. For each section, it only needs four sections to be constructed in turn to complete the excavation task. In other words, the section construction requires four excavation steps according to the planar partition optimization model.
Figure 6 shows the proposed dynamic optimization model based on the planar partition model consisting of four sections. To ensure the smooth and continuous excavation and support of the tunnel in the four sections, we select an initial point A in the optimal excavation path of the planar partition of the tunnel. Point A represents the original state before the tunnel excavation, which corresponds to the initial state without destroying the initial stress field and displacement field in engineering practice. We need to decide at stage 0 to select the first excavation block under the initial displacement field and stress field. The selection of S(1,1) or S(1,2) is indeed a process of comparison and optimization. This paper introduces the comprehensive evaluation index to evaluate the excavation effect and support effect after completing the excavation of the first partition after stage 0. In the process of optimization, we first comprehensively process the parameters of the deformation of the tunnel face, surrounding rock looseness, surrounding rock pressure, surface subsidence, etc. and then give the corresponding evaluation index. In each stage, the comprehensive evaluation index is optimized. Provided that it is optimal for excavation at stage 0 to select S(1,1) blocks using the comprehensive evaluation index, we can reach point B1 with starting from point A. In this process, only the first excavation step is optimized and analyzed, where points A and B are the initial and ending point of stage 0, respectively. The optimization from A to B is the dynamic optimization of this sub-process. After the optimization is completed, point B1 at stage 1 has two choices: S(2,1) and S(1,2). In other words, after completing the excavation of the S(1, 1) block, there are two kinds of decision-making schemes to be chosen: the lateral backward excavation or the horizontal downward excavation. Then we continue to refer to the comprehensive evaluation index. The optimization from B to C is the dynamic optimization of this sub-process. Assuming that it is optimal to excavate downward the horizontal section after excavating block S(1,1), the block S(2, 2) is selected after completing the comprehensive evaluation. After completing the optimization of stage 1, the optimal excavation scheme, meeting the comprehensive evaluation index, can be finally determined by constantly optimizing and comparing the sub-processes according to this method.

Optimization of excavation path.
Based on the above analysis, we can conclude that different choice in each stage results in various choices in the next stage and the corresponding comprehensive evaluation index are different. In addition, the tunnel section is divided into four sections according to the dynamic programming principle, and then there are four excavation paths (i.e. the first one is from stage 0 to stage 1, the second one is from stage 1 to stage 2, the third one is from stage 3 to stage 4, and the last one is from stage 4 to stage 5). However, there are a total of six excavation paths for all the four sections without adopting the dynamic optimization theory. In other words, there are a total of six times of analysis and calculation. It can be concluded that the optimization efficiency can be improved by using dynamic programming, especially in the case of more planar partitions.
Through the dynamic programming analysis on the optimization model of tunnel excavation in the four sections mentioned above, we can obtain the general optimization model of tunnel excavation based on DPP.
Using the DPP theoretical model, we can divide the problem of the general optimization analysis of the tunnel excavation into the several process optimization problems, that is, make choices in each sub-process and each stage to complete the tunnel excavation.
Phase partition
Using dynamic programming theory to optimize the excavation method of the large-section tunnel, we can divide the tunnel construction process into multiple stages according to the planar partition and construct it into a multi-stage selection decision model. Figure 6 shows that the planar tunnel excavation model with four sections comprises five interrelated stages and k commonly represents the phase variable,
Ascertain states
In the process of excavation of the large-section tunnel, each stage has several starting and ending points. These points are both the starting point of the current stage and the ending point of the previous stage and are defined as states. As shown in Figure 6, the starting point A represents the original state of the surrounding rock of the tunnel, and its state also represents the current state of the tunnel. If the construction reaches point B1 in stage 1, the tunnel is in the secondary stress field after the excavation of block S(1,1). The variables describing the real-time state of the tunnel are called state variables, such as displacement, stress, earth pressure, etc. The set of values corresponding to the state variables in the
Selection decision
Decision-making selection is a process of selecting a block for excavation in a sub-stage when one state of tunnel transforms into another state by excavating a block. A set
State transition
The actual tunnel excavation is a closely related process, that is, the results obtained in the last stage of excavation and support must be the initial state of the next stage. Such a process can be summed up as state transition of the tunnel excavation based on dynamic programming theory, whose mathematical formula is
In dealing with the state transition in the actual process, the controllable index represents
Process selection
There are five stages in the optimization model of four planar sections. From stage 0 to stage 1, it is an optimization process. From stage 0 to stage 2, it goes through two sub-stages of optimization and completes the selection of the optimization process. Starting from stage 0 to stage 5 is the whole process selection. For the whole process selection with n stages, its mathematical formula is given as follows:

The process from the starting point to the ending point of stage n is defined as the sub-process selection of stage n, which is written as

Objective function
In the optimization of tunnel excavation schemes, the evaluation of several alternatives needs to rely on the same index, which is the objective function of the optimization process, making this index the optimal solution. If the objective function takes the sub-process of tunnel excavation into consideration, it can be expressed as

In the excavation of urban tunnel caverns, the objective function

Given the initial displacement field and stress field, the optimization analysis of each stage is carried out in sequence using the sequential method in the optimization implementation of the planar partition excavation of the large-section tunnel. In this way, the mathematical model of the sequential solution for the excavation optimization of the large-section tunnel can be given as follows:

Therefore, tunnel excavation optimization could be carried out based on the DPP theory, and the optimization analysis process is as follows:
Step1: According to the optimization model of planar partition
Step2: According to the optimization parameters
Step3: The evaluation criteria for each optimal excavation scheme are comprehensively analyzed, and the parameters of the evaluation criteria are determined, that is, the objective function in the dynamic programming model is constructed. The optimal solution of the model solved by iterative calculation is the optimal excavation method.
Step4: The optimal scheme is further analyzed and calculated to determine the support measures and corresponding parameters.
Optimization of tunnel excavation scheme of Chongqing metro station
Project overview of Chongqing metro station
The Central Park East station of the metro Line 10 located in the east of the Yubei District, Chongqing Airport Town, east of the Tongmao Avenue. The Central Park East station adopts a 14 m island double-decker station with a net width of 23.0 m and a net height of 19.0 m. The maximum excavation span of the station is 24.54 m, the excavation height is 21.52 m, and the excavation section area is 468.55 m2. The vertical wall circular arch section is adopted, and the composite lining is used in the structure.
The surrounding rock of the station is mainly mudstone, which belongs to level IV and the range of the thickness of the soil layer is from 20.93 m to 30.16 m. The station is constructed by a bilateral tunneling method. It sets up the main construction passageway leading to the station hall. In the construction of the main channel, it sets up an auxiliary channel to enter the station platform layer, with a length of 79.702 m.
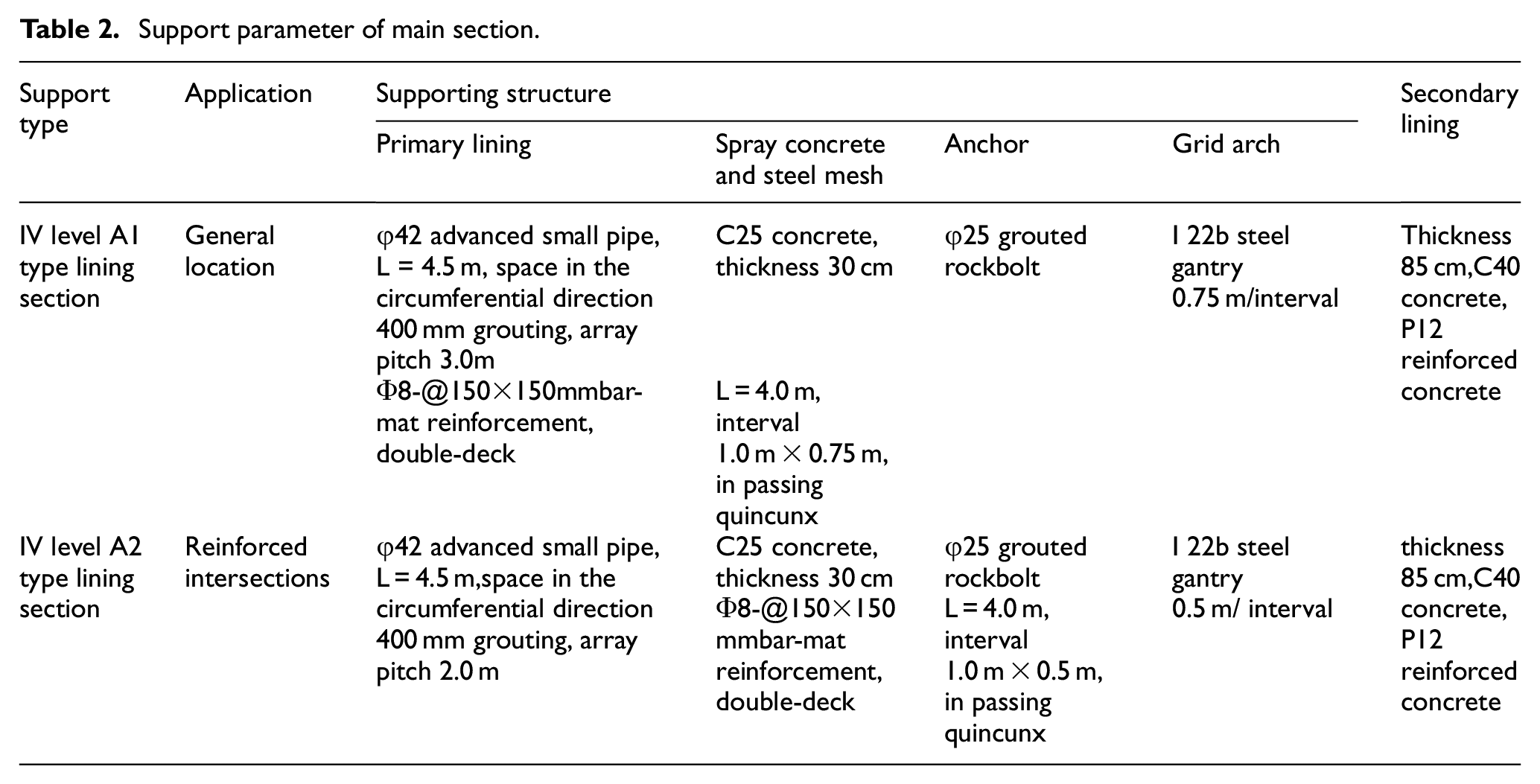
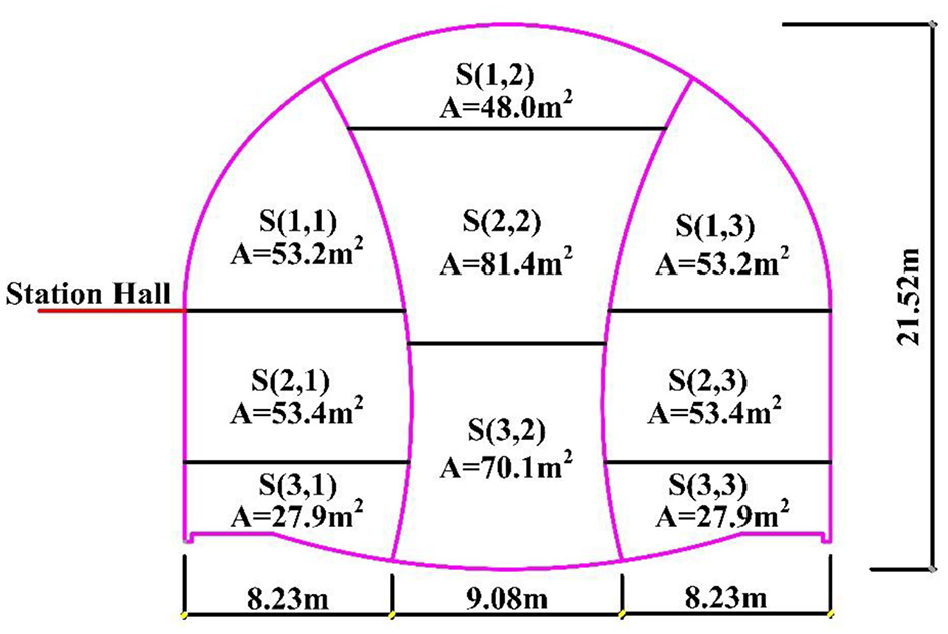
The Central Park East station adopts a straight wall plus circular arch section, the excavation size of its standard section is 24.54 m × 21.52 m, and the tunnel lining is the composite lining. There are two kinds of A1 and A2 type lining sections (468.55 m2). The design parameters of the main section of the station are shown in Table 2 and the design section is shown in Figure 7.
Support parameter of main section.

The section design of the Central Park East station tunnel- Initial design.
The original landform of Central Park east station is characterized by structural denudation and shallow mound topography. Due to the development of the city, human engineering activities have greatly changed the landform and landscape. Along the ground, the elevation is 357–394 m, and the relative elevation is about 37 m. Along with Tongmao Avenue, the whole of the vertical longitudinal slope is with the general slope angle of 2–4 degrees. Due to the transverse transformation to the original landform in the early stage of engineering construction, road or another construction scope of a steep slope is about 30–60 degrees.
Necessity of optimization
Based on the analysis of landform, geological hydrology and physical and mechanical parameters of Central Park East Station of the metro Line 10, as well as the design and construction of the tunnel, the following conclusions are drawn:
The level of surrounding rock in these areas is IV level at the station. The excavation space of the station is large in height, span and depth and the span of the station is large. In addition, the station is located in soft surrounding rocks, so the construction is difficult.
The station section is extremely large, which is classified as super large section tunnel according to the standard of International Tunnel Association. Nine blocks were originally planned to be excavated, but this method is characterized by many blocks, many processes, great interference in cross construction, many construction processes and complicated process conversion. Especially, there is a great interference in the construction of road intersections. When entering the station cavern from the construction passage, the underground space form is changeable, the distribution of stress and deformation of rock mass is very complex, and its local safety hidden danger is difficult to predict.
Based on the above analysis, it is necessary to optimize the construction methods of large section tunnel.
Proposal for optimization scheme
Due to a large number of construction parameters, the modification of a single parameter will affect the overall optimization of the construction scheme.
As shown in Figure 7, it is the initial design scheme of the construction method with nine sections, the construction of corridor of S(1,1) and S(2,1) sections divides the station hall layer into two parts: the upper and the lower layer. In excavating the S(1, 1) block following the excavation of section S(2, 1), it is inevitable to affect the construction of the corridor. Because the entrance of the corridor located in the middle of the upper and lower layers, it is difficult to construct the temporary inverted arch for layering during construction. Therefore, it is necessary to optimize the excavation method for the actual construction of the large section tunnel with nine sections. To improve the environment of the construction of the corridor and complete the construction of the sidewall and the temporary inverted arch, the existing excavation and support parameters are maintained in the optimization scheme, and only the size and sequence of the excavation section are optimized and analyzed.
Considering variables control, model size, and actual construction problems, the circular excavation footage adopted in this optimization is as follows:
The sidewall guide pit, the section of S(1,1) and S(1,2) (S(3,1)and S(3,2)) shall adopt the bench lengths of 30 m, the section of S(3,3) and S(2,1) shall adopt the bench lengths of 20 m, and others adopt the bench lengths of 10m.
As for the primary support: when the step method is adopted in the tunnel construction with a super-large cross-section of the IV-grade surrounding rock, measures must be taken to control the displacement of arch (wall) foot, such as a feet-lock bolt (pipe). Temporary transverse support or a temporary inverted arch should be provided for the construction of the step method. Shaped steel is used for temporary support and one for every two trusses in the longitudinal direction. The primary support is applied immediately following the tunnel face. After the process of S(2,2) during excavation, the temporary supports were removed.
As for the secondary lining: the secondary lining of super large section tunnel should be put into effect in time. The distance between the secondary lining and the upper and tunnel face of the part of S(1,2) is not more than 70 m for IV-grade surrounding rock.
As for the inverted arch: the inverted arch structure is adopted for the IV-grade surrounding rock. After the completion of the excavation of the bottom, and invert arch and its filling construction should follow up the part of S(3,2) to form a closed ring in time.
The theoretical model of planar partition optimization analyzed above,
The optimized scheme is shown in Figure 8 and the parameters are shown in Table 3. The nine-stage excavation methods in the case of i = j = 3 are used to optimize the set of parameters h. Considering the actual construction situation, the lower part of the S(1,1) area is adjusted to the station hall. It is convenient for construction vehicles to enter and pass through the construction passage to excavate the section and then optimizes the subsequent construction organization design. Meanwhile, the S(2,1) area was adjusted downward successively, and the S(3,1) area above the inverted arch was reduced. To reduce S(2, 1) area, manual excavation is adopted to reduce the disturbance of large-section tunnel to surrounding rock, especially to facilitate the control of arch deformation. Correspondingly, the S(2, 2) and S(3, 2) areas are increased to enlarge the area of core soil, which is convenient for the stability of the tunnel during construction. At the same time, a large part of core soil is reserved in the middle for the convenience of subsequent mechanical excavation.
Optimized excavation partition scheme.
Contrast table of parameters before and after optimization.

The actual excavation area of each partition varies with the h of each partition. The excavation area increases in some areas, whereas it decreases in some areas, and the actual excavation unloading process changes. Whether the original excavation scheme can be used or not needs to be further optimized and demonstrated. Therefore, the dynamic programming model and the analytic hierarchy process model can be used to optimize the excavation problem, and the large-section can be divided into nine blocks for multi-stage and multi-decision.
Optimization analysis based on DP_AHP
Excavation assumptions and constraints
For the excavation of the large-section tunnel, the nine areas are indeed nine sub-cavities and each area is excavated in a top-down sequence. The designed support parameters are applied to excavation support, and only the optimization results of parameter h(i, j) are considered. The one-time excavation is adopted for the rock and soil mass in each area.
Implementation of numerical calculation
For the construction mechanics analysis of the optimization scheme of the large-section tunnel excavation, it is very important to choose the reasonable calculation model because of a large number of calculations. For the optimization of nine-part excavation methods, the FLAC3D software is used to calculate, which has the advantages of easy parameterization, easy convergence and so on. The calculation model is shown in Figure 9. The set of state variables in each case can be obtained by numerical calculation. In other words, the different parameters determined from the planar partition optimization model are input into the FLAC3D computing model, and the corresponding variables that describe the real-time state of the tunnel are obtained, which are called state variables, such as displacement, stress, earth pressure, and so on. It’s also the basis of the key step of the optimization through the DPP method, the ascertain states.
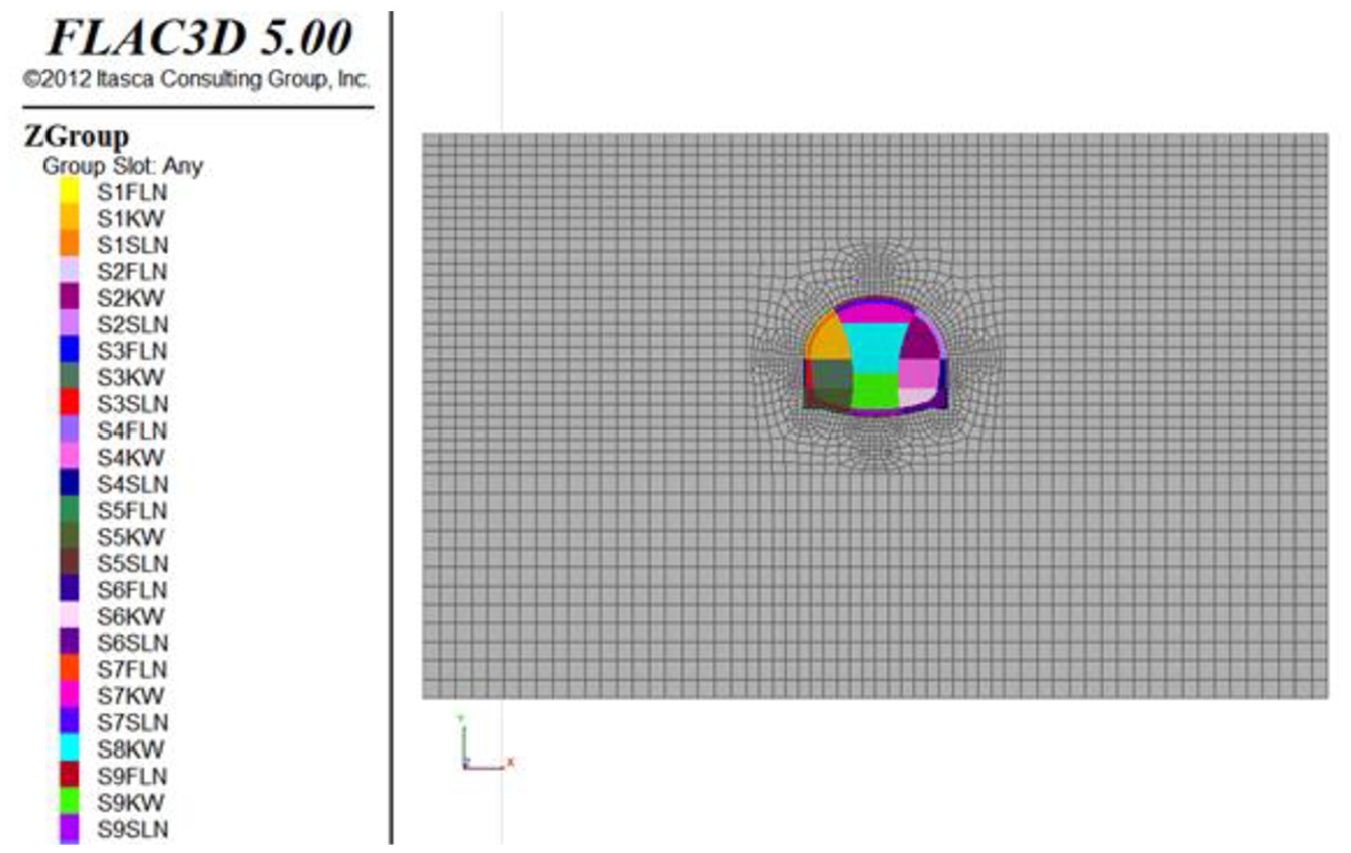
Optimal analysis model of nine excavations of Chongqing metro.
Construction sequence optimization based on DP_AHP
To avoid the arbitrariness caused by artificial optimization, the dynamic programming theory described above is adopted to optimize the excavation schedule of the large-section tunnel, and the scientific method is taken to quickly find the optimal solution. According to the dynamic programming theory, the implementation of nine-area excavation optimization methods has the following processes.
According to the above assumptions and constraints on excavation, we use the MATLAB program to sort and the number of the possible construction sequence is 1680. The sorting result data file as the input file is used for the parametric modeling calculation of FLAC3D. The efficiency of numerical simulation based on 1680 kinds of possibilities can not meet the actual production requirements. Therefore, the dynamic programming theory is used to optimize in each stage and the AHP theory is used to calculate the comprehensive evaluation index for all possible excavation schemes and their sub-process results. The ultimate maximum value of the evaluation index is taken as the final objective function value. Taking the comprehensive evaluation index of searching sub-process as the reward function, the cumulative comprehensive evaluation index value is the objective function, and the optimal path can be obtained by searching the sub-process in turn.
The comprehensive evaluation index based on AHP theory is the weight decision analysis of n sub-processes form criterion layers, such as surface settlement, vault subsidence, the difficulty of excavation, excavation size, etc. When the consistency test passes, the maximum value of the return weight matrix is the optimal comprehensive evaluation index of the sub-process, and the corresponding scheme is the optimal scheme of the sub-process. When the consistency test fails, the return value of 0 is used as the comprehensive evaluation index.
By using FLAC3D software platform and its convenient parametric modeling and calculation with flexibility, the optimization process is written into batch files to achieve intelligent optimization, which is executed by the following procedures.
The optimal construction scheme can be obtained through the above dynamic optimization calculation, as shown in Figure 10.

Automatic optimization algorithm flow based on DP–AHP theory.
Analysis of optimization results
The main results obtained by the above optimization analysis are as follows: the first three comprehensive evaluation indexes are used to analyze. In the sixth step of DPP method analysis, the block area and arch displacement after section segmentation are comprehensively considered as evaluation indexes in the objective function. And block area represents excavation efficiency, while arch deformation represents tunnel stability. Through the ratio of the two indicators and dimensionless and standardized treatment, the evaluation index is obtained.
The top three results of the comprehensive evaluation index are listed in Table 4. The first one is the optimal excavation sequence. That is, the excavation section of the tunnel is divided into three transverse blocks on the left, middle and right, with three layers on the top and bottom. The construction is carried out following the left and right cross excavation, and finally, the central core soil is excavated.
The excavation optimization results of nine excavations of Chongqing metro.

Conscious
The optimization theory is analyzed to solve the optimization problem of large-section excavation. Aiming at the multi-stage optimization process of tunnel engineering, the dynamic programming theory is first used to optimize a variety of schemes, especially in the case of multi-objective tunnel excavation, the multi-objective planning theory is analyzed, and the analytic hierarchy process model is applied to the evaluation and decision-making of tunnel excavation. After understanding the applicable scope of various optimization theories, the optimization research of the tunnel excavation method based on DP-AHP theory was determined.
A unified planar partition model is established by combining the horizontal hierarchical model with the horizontal block model. The model can explain all the problems of planar optimization by four parameters.
By analyzing the actual optimization problem of Central Park East Station of Chongqing Metro Line 10, the parameters were optimized, and the DP_AHP theory was applied to optimize the excavation scheme with the optimal comprehensive evaluation index. It has been proved that the dynamic programming theory can solve the optimization problem of large-section excavation well.
The optimization scheme in the plane state is explained and applied by the optimization model, and the two-dimensional mechanical problems existing in the process of tunnel excavation are numerically calculated and optimized. If the computational accuracy is required to be higher, and the correct computer resource consumption is not considered, the three-dimension model can obtain higher accuracy and more reliable optimization results. The optimization analysis of two-dimensional problems can also meet the needs of tunnel construction.
Footnotes
Acknowledgements
The authors would like to express the appreciation and thanks to the managers and China Tiesiju Civil Engineering Group Co., LTD.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Science of China (51478118), the Guangxi Science and Technology Plan Projects(AD18126011) and the China Scholarship Council.