This paper is concerned with the stability of second-order linear time-varying systems. By utilizing the Lyapunov approach, a generally uniformly asymptotic stability criterion is obtained by adding the system matrices into the quadratic Lyapunov candidate function. In the case of the derivative of the Lyapunov candidate function is semi-positive definite, the stability criterion is also efficient. Based on the proposed results, the systems with uncertain disturbances such as structured independent and structured dependent perturbations are considered. Using the matrix measure and the singular value theory, the bounds of the uncertainties are obtained that guarantee the system uniformly asymptotically stable, while the bounds of state feedback control input are also derived to stabilize the second-order linear time-varying systems. Finally, several numerical examples are given to prove the validity and correctness of the proposed criteria with existing ones.
Second-order systems can represent many practical processes in nature, such as RLC circuit networks, armature-controlled DC motors, and spring-mass-damper systems, etc.1–3 For example, one of the spring-mass-damper systems is the buffer. Buffer devices are the main components of energy generation in the process of absorption and dissipation. Buffer can be seen everywhere in life, such as shock absorbers for automobiles and buffers for energy-consuming collisions. Therefore, it is necessary to study the stability of the second-order linear time-varying (SLTV) systems. Different from linear time-invariant systems, there are several different definitions for linear time-varying (LTV) systems, including stability, asymptotic stability, and exponential stability, which can distinguish uniform stability from non-uniform stability according to the relationship with the initial time of the system. For first-order LTV systems, the efficient tool for testing the stability is the Lyapunov approach. The main idea is to find a positive definite energy function and derive the conditions by solving the Linear Matrix Inequalities (LMIs). For time-invariant systems, researchers generally select the quadratic matrix of the derivative of Lyapunov function as an identity matrix, then obtain the condition by employing LMIs.4–8 However, the above method is not suitable for LTV systems, that is, it is very difficult to acquire the integral of the time-varying matrix. Therefore, the general stability criterion of the LTV systems is still an open and unsolvable problem in control theory field.
Early researchers are devoted to first-order time-invariant systems. Anderson and Moore considered the first-order scalar system.9 Due to the simplicity of the scalar system, then the trajectory of the state variable can be obtained directly. For the stability of the time-invariant systems can be determined directly in terms of the locations of all the eigenvalues, while the stability of the LTV systems cannot be linked to the parameters of the system which can deicide the eigenvalues. Further, most of the scholars usually select the Lyapunov approach to deal with it. Some of them use the eigenvalues of the matrix to determine the positive or negative definiteness.10 If all eigenvalues of the quadratic matrix are smaller or larger than zero, then the negative or positive definiteness of it can be determined. On the base of the eigenvalues, later developed a singular values method directly related to eigenvalues in the actual field. Xi gave the robust stable condition for the uncertain LTV systems by the singular values theory.11 Chen and Chou paid their attention to stability analysis of LTV systems with both time-varying structured and unstructured perturbations.12 Recently, a lot of researches have appeared for different LTV systems.13–20
Second-order systems capture the practical process of many mechanical systems, such as spacecraft orbital maneuver and spacecraft rendezvous, etc. It is challenging to obtain analytical solutions for these systems. The general method of the stability analysis of second-order systems is to transform the original system into a first-order form. Lu et al. utilized the matrix measure and Kronecker product to analyze the stability.21 The matrix measure is related to the eigenvalue and the matrix norm. Using the matrix measure theory, we can transform the SLTV system into its corresponding comparison systems and the exponential stability of the system can be obtained.22 However, the conditions are hard to be satisfied, and the scope of application is limited. Besides, Tadi directly selected the quadratic form as the Lyapunov candidate function without transforming the system equation.23 Getting the stability result of the eigenvalue and matrix measure, Cao and Shu focused on the robust stability bounds for multi-degree of freedom linear systems with structured perturbations, concluding the asymptotic stability bounds for the second-order time-invariant systems.24 Cao et al. aimed at the second-order damped systems with nonlinear uncertainties, proposing asymptotic stability criterion based on the eigenvalue.25 Diwekar et al. considered the robust controller design according to the structured uncertainties.26 With the arranged eigenvalue sequence, they proposed a simple procedure to select control gains which can guarantee the stability of the system. Adegas et al. paid their attention to linear second-order systems, by using LMIs to obtain the asymptotic stability results.27 From the above discussion, the basic stability problem of second-order time-invariant systems is solved. Recently, Sun et al. combined the matrix measure of the SLTV system with a special form, through the linear transformation, they deduced the exponentially stable criterion.28 Tung et al. considered the singular SLTV system by improving the approach in Sun et al.28 Due to the system cannot be transformed into first-order from, Tung used the linear transformation and Volterra operator to obtaining the exponentially stable result, nevertheless, the calculating process is intricate instead.29 Roup and Bernstein mainly investigated the adaptive stabilization of the SLTV system where the coefficient matrices have time-varying bounds and obtained the equilibrium set which leads the system to uniform stability.30
However, few results are available for the uniformly asymptotic stability of SLTV systems, and also the robust stability. The existing results can only be applied to first-order systems. This augmentation destroys some advantages of the originally second-order models, such as controllability, full-actuated characteristic, and so on. Therefore, it is very necessary and meaningful to derive the results based on the coefficient matrices of the SLTV system. Our research team has achieved a series of results for SLTV systems. Gu et al. proposed the robust stable criterion of uncertain SLTV systems based on the original system coefficients matrices, then gave the stability conditions which could be utilized to design controller for the extending space structures system of the spacecraft.31 Further, Gu et al. considered the parametric design approach to LTV systems by using dynamic compensator and multi-objective optimization.32,33 In this paper, we focus on the uniformly asymptotic stability and robust stability of SLTV systems, further, the feedback stabilization control law is designed to verify the proposed approach.
The major contributions of this research are introduced as follows. Firstly, we propose a constructive method for the Lyapunov function based on the originally coefficient matrices, as well as the uniformly asymptotic stability conditions. Secondly, considering structured independent and structured dependent perturbations, the conditions of robust stability are also given. Thirdly, based on the proposed criterion, we design a simple symmetrical state feedback controller that stabilizes the closed-loop system.
The remainder of this article is organized as follows. The problem formulation and preliminaries are given in Section 2. In Sections 3 and 4, the conditions of uniformly asymptotic stability for SLTV systems are proposed, also the state feedback control law. Further, uncertain disturbances such as structured independent and structured dependent perturbations are considered in Sections 5 and 6. Finally, several numerical examples are given to verify the proposed criterion in Section 7.
Problem formulation and preliminaries
Consider a class of SLTV systems as follow:
where , and are all piece-wisely differentiable with respect to and uniformly bounded time-varying symmetric coefficient matrices, is the state variable, and , is a finite number.
where is piece-wisely continuous and uniformly bounded. Then the LTV system is uniformly asymptotically stable if and only if for an arbitrary uniformly bounded and uniformly symmetric positive definite matrix , there exists a uniformly bounded and uniformly symmetric positive definite matrix satisfying the following Lyapunov differential equation
Lemma 2.36The LTV system (7) is uniformly asymptotically stable if and only if for an arbitrary uniformly bounded and uniformly symmetric semi-positive definite matrix
where the matrix pair is uniformly completely observable, and there exists a uniformly bounded and uniformly symmetric positive-definite matrix satisfying Lyapunov differential equation (8).
Main results
Let
then the SLTV System (1) can be rewritten as the following first-order form
where
Selecting a Lyapunov function candidate as the following quadratic form.
For intuition, explicit time dependence is dropped in following derivation, we can calculate the derivative of along the solution of the system (11).
According to the Lyapunov stability theory and matrix theory, the system (11) is uniformly asymptotically stable if the following condition hold:
where are finite positive constants, is the identity matrix, and the condition (15) means and are uniformly bounded and uniformly positive and negative definite and
We partition the matrix as
where the element is a symmetric matrix. Calculating the items of equation (14)
then we have
where
Theorem 1.The SLTV system (1) is uniformly asymptotically stable if there exist scalar constants , , and positive constants , satisfying the following conditions
1.
where
2.
where
and
Proof. Define a Lyapunov function candidate as
Substitute the above equation into (18), we have the in the form of equation (22). According to the Lyapunov stability theory, the system (1) is uniformly asymptotically stable if . Due to that matrices and are not symmetric, we introduce the following matrices
it is easy to prove that the matrix is positive definite if , also the matrix . This implies that the system (1) is uniformly asymptotically stable if inequalities (19) and (21) hold. The proof is finished.
In applications, we can choose for convenience, the following corollary can be easily obtained from Theorem 1.
Remark 1.Theorem 1 is a general form. For convenience of application, we choose . The uniformly asymptotically stable conditions are simplified as
where
and
where
If the above conditions are not met, that is, the matrices and are not uniformly bounded or uniformly positive and negative definite. We only can obtain the positive and negative definiteness of and , then the asymptotic stability of the system (1) can be obtained as
and
where the matrix Q is given as (22).
Corollary 1.Assume that the matrices , and of the SLTV system (1) are piece-wise continuous and uniformly bounded diagonal. The SLTV system (1) is stable if the following conditions are satisfied
In some cases, the matrix can be guaranteed the negative definiteness, that is, is semi-negative definite, we cannot deduce the stability of the system (1) based on Theorem 1. For this situation, we take as equation (30). When the condition (31) holds, the matrix pair is observable, according to the Lyapunov stability theory, the system (1) is stable. The proof is completed.
Remark 2.Corollary 1 is to tackle the case that the matrix is semi-positive definite, in other words, the conditions in Theorem 1 are invalid. Different from the Corollary 1, there is another particular stability criterion based on the Lemma 2. For the SLTV system (1), assume that the system matrix is uniformly bounded, if there exists a bounded and uniformly symmetric positive definite matrix such that the matrix is bounded and uniformly symmetric semi-positive definite and can be written to the following form
From the above two forms of the matrix , if the matrix pair is uniformly completely observable, the system (1) is uniformly asymptotically stable.
In general, the completely observable condition require calculation of the state transition matrix.9 For a time-varying system, the state transition matrix is difficult to solve.
State feedback control
In this section, we propose a method to design a state feedback control law for SLTV systems. Consider the SLTV system (1) with . We choose the following state feedback control
where
and matrices and are feedback gain matrices, are elements of feedback gain matrices. Using the Lyapunov method to obtain the bounds of the feedback control gain matrices such that the SLTV system (1) is stable.
Theorem 2.The system (1) is uniformly asymptotically stable, if there exists a scalar satisfying the following conditions
1.
where
2.
where
with
Proof. Substituting the control law (33) into the SLTV system (1), yields
Selecting the Lyapunov candidate function as the following form
then, the matrix is uniformly positive definite. Deducing the derivative of Lyapunov candidate function and calculating the matrix measure of
According to Lemma 1, we have
where denotes the maximum eigenvalue of the related matrix, represents the upper bound of the matrix measure of . The uniformly asymptotically stable bound of the control input can be obtained. The proof is finished
Remark 3.In Theorem 2, the state feedback control gain matrices are deduced for the dimension of , but the result is suitable for the dimension of . Thus, the generally state feedback control is given as follows:
Structured independent perturbation
In this section, we consider the following SLTV system (1) with uncertainties (perturbations)
where where , and are all known piece-wisely differentiable with respect to and uniformly bounded time-varying symmetric coefficient matrices, and denote time-varying structured independent perturbation matrices in the following form
where and are the real positive uncertain parameters, and are real known positive constant matrices.
Let
then, the uncertain SLTV system (39) can be rewritten into the first-order form
where
Theorem 3.The uncertain SLTV system (39) with structured independent perturbation (40) is uniformly asymptotically stable if there exist scalar constant and positive constants , satisfying the following conditions
1.
where
2.
where
and the matrices and are uniformly bounded for all .
Proof. Define a Lyapunov candidate function as
Calculate the derivative of along the solution of the system (39)
Using the definition of eigenvalue to deal with the negative definiteness of
From the properties of matrix measure in Definition 2, we have
where
and the matrix is in the form of (45).
As a consequence, for all , the following inequality holds
Further, we can deduce the above inequality
that is, inequality (44) holds, then the system (39) is uniformly asymptotically stable. The proof is finished.
Structured dependent perturbation
In this section, we consider the time-varying structured dependent perturbation matrices and in the following form
where , which are piece-wise continuous, are also given constant or time-varying matrices and are time-varying uncertain parameters.
Theorem 4.The uncertain SLTV system (39) with structured dependent perturbation (47) is uniformly asymptotically stable if there exist scalar constant and positive constants , satisfying the following conditions
1.
where
2.
where
and
Proof. The proof is similar to Theorem 3. Calculate the derivative of along the solution of the system (39)
According to the Lyapunov stability theory, should be guaranteed, that is,
where
Furthermore, the bounds of uncertainties can be determined by
where , and represent the singular values. The proof is completed.
Numerical examples
In this section, we provide several examples to illustrate the obtained results.
Example 1
Consider the following SLTV system
We choose , then the matrix can be obtained as
Based on Equation (19), we have , . is positive definite but not uniformly positive definite, then we have
and
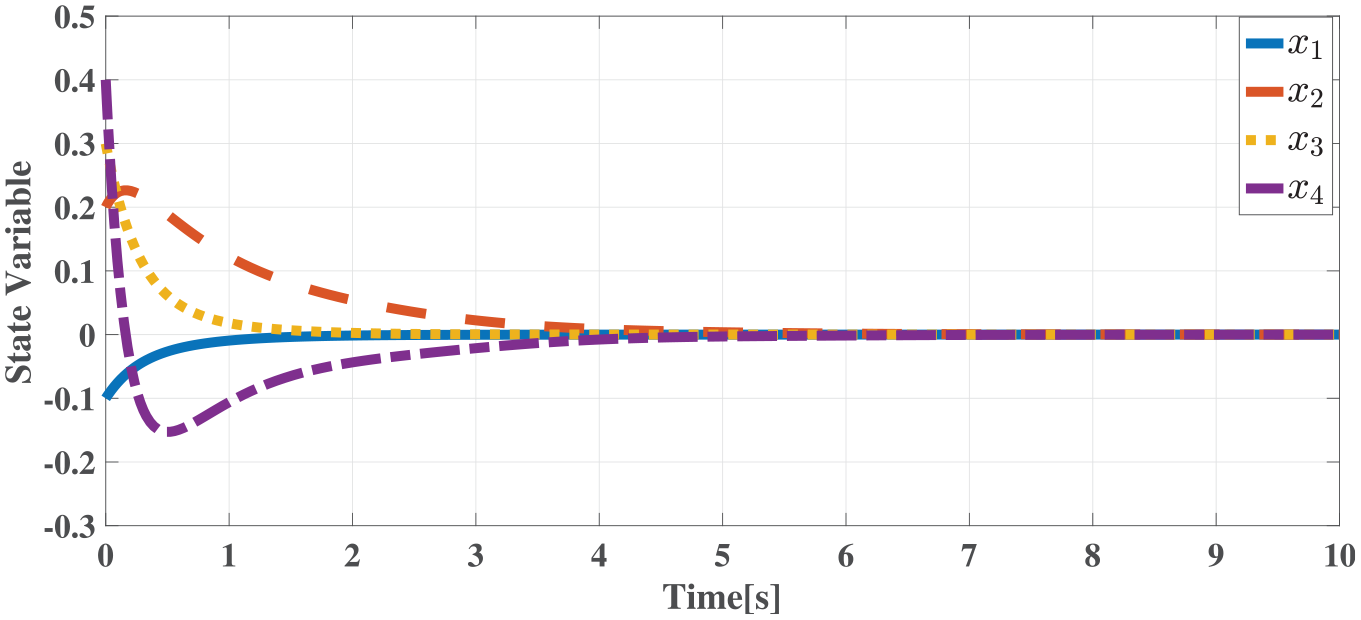
Because the matrices and with the element , this means and are unbounded. The asymptotic stability of the system can be concluded according to Remark 1. Set the initial time , and initial values of the state variable are . The trajectories of the state variable are shown in Figure 1. From Figure 1, the state variable of the system tends to zero with the increase of time. When the time is large enough, the state variable of the system would remain at zero and without changes. The system is in equilibrium, indicating that zero is the stable point of the system. The system is asymptotically stable.
Trajectory of state variable of Example 1.
Example 2
Consider the following SLTV system
where
According to Theorem 1, we choose the special form of with .
then we can obtain
The matrices and are uniformly bounded and uniformly positive definite, then the system is uniformly asymptotically stable based on Theorem 1. To illustrate the above results, we give the following simulation.
From Figure 2, we can see the system is asymptotically stable with initial values are .
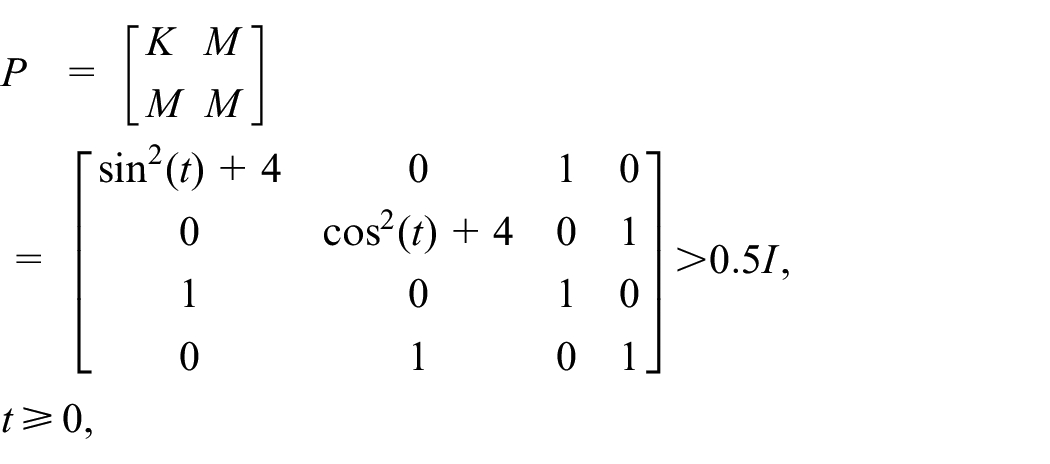
the exact value of cannot be obtained due to the existence of , that is, the criterion in28 is invalid. By using the method in this paper, we have
and
According to that the matrices and are symmetric, the system (52) is asymptotically stable without calculating matrices and . The simulation result is shown in Figure 3 with the initial condition .
Trajectory of state variable of Example 3.
Example 4
Revisit the system in Example 2 with the following structured independent perturbation.
where
with
Using the analytical method in Theorem 3 to deduce the asymptotically stable bounds. Calculate the Lyapunov function and its derivative with and
we have . In this example, we choose as , and are uniformly bounded, existing . Then, the stable bound is
If the uncertain parameters and are in the above region, the system (53) is uniformly asymptotically stable. For simulation, we choose , the trajectory of state variable is shown in Figure 4.
Trajectory of state variable of Example 4.
Example 5
Consider the following the feedback control system
where
Calculate the bounds of the control input based on Theorem 2. Let , and , we have
Calculate the matrix measure of and is a positive constant, then we get
According the boundary property of trigonometric functions, for the situation , we have
and
the final result is
Conclusions
The proposed stability criterion of SLTV systems can be applied for more general situations. By constructing the Lyapunov candidate function with the system parameters, a simple and efficient criterion is proposed to test the uniformly asymptotic stability of SLTV systems. On the base of the proposed stability criterion, the stability of uncertain second-order systems is also discussed. With the help of the matrix measure, some simple stability conditions are deduced, such as robust asymptotic stability, etc. Furthermore, the uniformly asymptotically stable bound is also considered and a simple criterion is obtained. Finally, some numerical examples are introduced to verify the correctness of the stability criteria. The next major work focus on two aspects, one is to extend the results to output feedback control for uncertain SLTV systems, another is to establish a multi-objective optimization for choosing the parameters.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Major Program of National Natural Science Foundation of China (Grant No. 61690210, 61690212).
ZhangXWangYZhuG, et al. Compound adaptive fuzzy quantized control for quadrotor and its experimental verification. IEEE Trans Cybern. Epub ahead of print 14 May 2020. DOI: 10.1109/TCYB.2020.2987811.
2.
ZhangXChenXZhuG, et al. Output feedback adaptive motion control and its experimental verification for time-delay nonlinear systems with asymmetric hysteresis. IEEE T Ind Electron2020; 67: 6824–6834.
3.
ZhuGWangSSunL, et al. Output feedback adaptive dynamic surface sliding mode control for quadrotor UAVs with tracking error constraints. Complexity2020; 2020: 1–15.
4.
RatchagitK. Stability of linear time-varying systems. Int J Pure Appl Math2010; 63: 411–417.
5.
RughaWJ. Linear system theory. New Jersey: Prentice Hall, 1996.
6.
AeyelsDPeutemanJ. Uniform asymptotic stability of linear time-varying systems. In: BlondelVSontagEDVidyasagarM, et al. (eds) Open Problems in mathematical systems and control theory. London: Springer, 1999, pp.1–5.
7.
SlotineJELiW. Applied nonlinear control. New Jersey: Prentice Hall, 1991.
AndersonBDOMooreJB. New results in linear system stability. SIAM J Control Optim1969; 7(3): 398–414.
10.
KalmanREBertramJE. Control system analysis and design via the second method of Lyapunov: (i) continuous-time systems (ii) discrete times systems. IEEE Trans Automat Contr1960; 4(3): 112–112.
11.
XiH. Stability robustness analysis of state-space models for uncertain linear time-varying systems. Int J Syst Sci1994; 25: 2221–2233.
12.
ChiouKL. Stability behavior of linear time-varying systems. J Guid Control Dynam1994; 17: 857–859.
13.
JajarmiAParizNEffatiS, et al. Infinite horizon optimal control for nonlinear interconnected large-scale dynamical systems with an application to optimal attitude control. Asian J Control2012; 14(5): 1239–1250.
14.
JajarmiAHajipourM. An efficient recursive shooting method for the optimal control of time-varying systems with state time-delay. Appl Math Model2016; 40: 2765–2769.
15.
ZhouB. On asymptotic stability of linear time-varying systems. Automatica2016; 68: 266–276.
16.
JajarmiAHajipourMBaleanuD. A new approach for the optimal control of time-varying delay systems with external persistent matched disturbances. J Vib Control2018; 24: 4505–4512.
17.
ZhouB. Improved Razumikhin and Krasovskii stability approaches for discrete-time time-varying time-delay systems (Regular Paper). Automatica2018; 91: 256–269.
18.
ZhouBLuoW. Improved Razumikhin and Krasovskii stability criteria for time-varying stochastic time-delay systems. Automatica2018; 89: 382–391.
19.
JajarmiAHajipourMSajiadiSS, et al. A robust and accurate disturbance damping control design for nonlinear dynamical systems. Optim Contr Appl Met2019; 40(3): 375–393.
20.
ZhouB. Construction of strict Lyapunov-Krasovskii functionals for time-varying time-delay systems (Regular Paper). Automatica2019; 107: 382–397.
21.
LuJGXiaoJZChenWD. Maximal perturbation bounds for -stability of matrix second-order systems with one-parameter perturbations. Automatica2012; 48: 995–998.
22.
FeronEApkarianPGahjnetP. Analysis and synthesis of robust control systems via parameter-dependent Lyapunov functions. IEEE T Automat Contr1996; 41: 1041–1046.
23.
TadiM. On the stability of second order time varying linear systems. J Vib Acoust2006; 128: 408–410.
24.
CaoDQShuZZ. Robust stability bounds for multi-degree-of-freedom linear systems with structured perturbations. Dynam Stabil Syst1994; 9(1): 79–87.
25.
PunDLauSLCaoDQ. Stability analysis for linear time-varying system with uncertain parameters: application to Steady-State Solutions of Nonlinear Systems. J Vib Control1999; 5: 925–939.
26.
DiwekarAMYedavalliRK. Stability of matrix second-order systems: new conditions and perspectives. IEEE T Automat Contr1999; 44(9): 1773–1779.
27.
AdegasFDStoustrupJ. Linear matrix inequalities for analysis and control of linear vector second-order systems. Int J Robust Nonlin2015; 25(16): 2939–2964.
28.
SunJWangQGZhongQC. A less conservative stability test for second-order linear time-varying vector differential equations. Int J Control2007; 80(4): 523–526.
29.
TungSLJuangYTHuangWY. Stability analysis for linear systems with singular second-Order vector differential equations. IEEE Trans Automat Contr2011; 56(2): 410–413.
30.
RoupAVBernsteinDS. Adaptive stabilization of linear second-order systems with bounded time-varying coefficients. J Vib Control2004; 10(7): 963–978.
31.
GuDKLiuGPDuanGR. Robust stability of uncertain second-order linear time-varying systems. J Franklin Inst2019; 356: 9881–9906.
32.
GuDKZhangDW. Parametric control to second-order linear time-varying systems based on dynamic compensator and multi-objective optimization. Appl Math Comput2020; 365: 124681.
33.
GuDKZhangDWDuanGR. Parametric control to linear time-varying systems based on dynamic compensator and multi-objective optimization. Asian J Control. Epub ahead of print 17April2019. doi: 10.1002/asjc.2112.
34.
HarrisCJMilesJF. Stability of linear systems: some aspects of kinematic similarity. London: Academic Press, 1980.
35.
WeinmannA. Uncertain models and robust control. Berlin: Springer-Verlag Wien, 1991.
36.
DuanGR. Roust stability of uncertain second-order time-varying linear systems. J Syst Sci Math Sci2014; 34: 1192–1205.