
Abstract
The development of robotic interaction is becoming an increasing topic. The excellent grasp ability of low safety and fragile objects will greatly solve the complex labour of people. Rigid actuation have made significant progress for manufacturing and automation assembly, but it lacks of excellent interaction ability for humans and unstructured environments. Soft manipulator is the basic part of man-machine safety cooperation, which can make up for the deficiency. This paper describes the current research status of soft manipulator, driving methods, structures of soft manipulator and principles. Then, we specially show the joint fluid-elastic pneumatic drive, which enables control bending of different joints of the fingers. A detailed classification and principle description of intelligent materials is made for the flexible hands application. In addition, the principle of two new driving modes: biological driving and gas-liquid driving are presented. The performance of different driving modes is compared in detail, and the advantages and disadvantages of different pneumatic driving modes are listed. Finally, we make some prediction for the application prospect of soft manipulator in the future. The practical application and key problems of soft manipulator are summarised endly.
Keywords
Introduction
The intelligent response and motion characteristics of natural organisms have always been the source of scientists’creation. 1 With scientists studying molluscs in nature, such as elephant noses, 2 earthworm bodies, 3 plant entanglement4–6 and octopus tentacles, 7 bionic shape-shaping soft robots have been widely designed. With the maturity of 3D printing technology and the extensive development of new intelligent materials, software robots has come into our life service. The connection and contact parts of traditional rigid manipulator are composed of rigid material, which is difficult to achieve matching with the stiffness of the unstructured environment, but also easily damage the objects with soft surface and small volume. 8 In the aspects of man-machine cooperation, medical rehabilitation, food picking, grabbing and sorting, and personnel rescue, rigid manipulator relying on sensing and control to realise safe interaction not only brings technical difficulty, but also makes the whole set of devices more expensive, which is not conducive to popularisation and application. Therefore, soft manipulator became a major focus for many robots service and academic research groups.
The soft manipulator is new field with promising application in industry. The softness of flexible material makes the soft robot have the softness of human skin, and effectively solving the shortcomings of low safety and fragile objects.9,10 Even in unstructured environments, soft manipulators will not harm people. Soft manipulators are able to bend and twist with high curvature,11,12 so they can be used in narrow spaces to make the body deform continuously, realising the action of imitating biology, adapting to their shape and grasping irregular objects. 13 Soft manipulator have received widespread attention and achieved obvious results. In grasping objects, a multi-armed octopus robot has been developed by the Italian bionic robot laboratory. 14 Combining shape memory alloy (SMA) with soft materials, the multi-armed octopus robot can walk in water, and grab objects with different shapes and sizes. Furthermore, Fasto developed a continuous deformation of the elephant-nose robot, 15 which can do the large objects grabbed task well. Further invented octopus tentacles with suction cups, 16 the tentacles of the winding and suction cup to achieve better grasping. Inspired by pelican eels devouring prey, woongbae developed hexapod robots and omnipotent software grips. 17 The use of multiple hexapod robots can quickly grab objects. Because of the pneumatic expansion, the internal space is reduced and compressed and the cavity can grasp various objects. Each finger is composed of a curved driver and a sucker from the finger tip, which can grab and absorb different types of objects. 18 Massachusetts Institute of Technology developed soft-body hands that can automatically perform grips based on internal state measurements. 19 Working in narrow spaces, inspired by the natural navigation of biological growth, Elliot Hawkes invented a software robot that can be driven by pneumatic growth, the front-end camera can better understand the environment. 20 The switch of the control chamber solenoid valve on both sides of the soft machine body controls the unilateral elongation, thus working through the extremely narrow and complex environment. Ohio State University has developed a software manipulator for embedded SMA drivers and flex sensors that can be applied in narrow spaces and complex structures as well as safe and human interactions. 21 Manipulators also play an important role in the medical field. Polygerinos of Harvard University found that the pneumatic actuator can be safely moved with human fingers, which are composed of channels with pneumatic network function, and a design of soft palm gloves was carried out. 22 In addition, Conor Walsh of Harvard University has developed a very lightweight wearable soft glove that optimises the design of the brake by applying mathematical modelling of fluid-powered and fibre-reinforced brakes, and incorporates a number of sensors into the glove to assist in long-term wearable treatment for the recovery of people with hand disabilities. 23 To better match hand grasp perception, Cornell University have developed a soft manipulator, which transmit light at the joints and collects data about touching objects, thus it accommodates catch up objects with the intensity and detects their shape and texture. 24 In software research and design development, Tsinghua University has proposed a vision-based tactile sensing technique for soft robotic hands. 25 When the manipulator grabs the object, it can obtain information from captured images including bending position, bending direction perception. Panagiotis et al made a detailed study on the bending principle of fibre reinforced soft manipulator in free space. Finally, they carried out quasi-static analysis and finite element model through experiments, and comprehensively analysed and described its working principle. 26 Columbia Aslan Miriyev designed hard and soft composites. Based on this, McKibben muscle was developed. McKibben type drive is driven by an internal screw resistor wire without any compressor or pressure equipment. 27 A rolling soft robot (RSR) driven by dielectric elastomers was proposed by Shanghai Jiaotong University. 28 It has unique advantages including low quality, mechanical flexibility, mute running and quick response. Furthermore, they have developed three machine grips FRST actuators with flexibility and adaptability, which gripe stiffness can be increased by 120 times. 29 The Korea Institute of Science and Technology has developed a new type of variable stiffness structure designed by the acoustic small bone junction structure of echinoderms. The structure of echinoderms will cause stiffness changes. 30 Wuhan University of Technology has proposed a new type of soft hand with a mixed actuator system, which can improve the grasping force and complete complex tasks by complementing each other’s actuator characteristics. 31
According to the driving mode, this paper divides into tendon drive, pneumatic drive, intelligent material drive and other drive. This paper presented the attributes of these main driving methods, compared the advantages and disadvantages of the main driving forms of pneumatic, and makes statistics on the publication of software manipulator related papers. Finally, the application prospect and future trend of software manipulator are summarised.
Driving modes of the software manipulator
Driving actuator is the most basic and core part of the software manipulator. The stretching, torsion and bending of flexible materials are important attributes. Flexibility and nonlinear motion of soft materials pose a major challenge to the driving of soft hands. In this paper, the driving modes are divided into tendon drive, fibre-reinforced actuator, fluid-elastic pneumatic drive, variable stiffness pneumatic drive and intelligent biomimetic materials.
Tendon drive
Tendon drive is a mode that the fingers driven by the rotation of the motor to pull the cables. Classified by composition of fingers material fingers, it is divided into fully flexible fingers and mixed soft rigid fingers. According to the number of pull wires, it is divided into single tendon stretch and multiple tendon stretch.32,33 The basic principle of tendon drive is to pull the cable and produce a certain bending moment at the fixed point, so that the finger moves. The cable can pass through the complex path and fit well in the soft structure. It is important to bear a large tension without changing the body size. 34 The tension of the pull wire drives the pulley at the joint to rotate, thereby bending the fingers. Figure 1 is a single motor control flexible anthropomorphic hand developed by Italian biological machine Soft Robotic Gripper, the spool on the motor pulls the pull wire inside the finger, because the inner pull wire becomes shorter and the finger bends. 35 To increase finger flexibility and precise control, a soft-rigid hybrid manipulators of multiple tendons developed by the Zurich Federal Institute of Technology (Figure 1(b)). The phalanx of the finger is composed of wooden materials with pulleys at both ends, which can achieve stretching, abduction and adduction. BiomHED wearable tendon drive device developed by the Catholic University of the United States can effectively recover the rehabilitation treatment of the hand after stroke (Figure 1(c)). 36 Based on this, Hyunki In et al. developed a relaxation enabling mechanism to improve efficiency and ensure the safety of soft tendon wiring system. 37

Different tendon-driven forms. (a) The axis pulls the finger and bends; (b) Multiple tendons pull finger bending; and (c) Wearing a tendon drive device.
Fibre-reinforced actuator
The fibre reinforced driver is composed of three parts: superelastic cavity, non-extendable limiting layer and fibre reinforced layer.38,39 The fibre reinforced layer is the core of the fibre reinforced driver, which can achieve a variety of driving actions by changing the winding angle of the fibre reinforced layer. Harvard University 40 has experimentally confirmed that simply changing the fibre angle allows the actuator to be adjusted to achieve a wide range of motions (Figure 2(a)), including axial extension, radial extension and distortion. The limiting strain layer consists of non-extensible materials (gauze, paper, etc.). When pressure is applied inside the driver, the limiting strain layer limits the axial expansion on one side of the driver, and the other side is expanded by pressure expansion, resulting in bending motion. The Shanghai Jiaotong University of China 41 has developed three manipulators with fibre-reinforced actuators to realise the grasping of different objects (Figure 2(b)).

Structure and principle of fibre-reinforced actuator. (a) Changing the angle of fibre and realising the bending motion and (b) Fibre-reinforced structure of the manipulator to grab task.
Finger fluid-elastic pneumatic drive
To make the bending of software drives more anthropomorphic, scientists have developed local fluid elastic drives.42,43 In addition, according to the fine air cavity is concentrated in different positions of the finger, and the driver is divided into joint fluid elastic drive and phalanx fluid elastic drive.44–46 When the drive is under pressure, the chamber at the joints or phalanges with small stiffness expands and stretched, and the drive bends. Zhaojun luo of jiangsu university, China, have designed 14 capacitive stretchable hands for bending joints (Figure 3(c)). Each bending joint is independently controlled by an external pipe. The control system makes corresponding pneumatic control by collecting the finger bending signal on the sensor. 47 German automation technician Festo 48 has developed a biomimetic hand with pneumatic bellows on the phalanx (Figure 3(d)).When the phalanx gas chamber is filled with gas, the fingers bend. On the contrary, when the gas is emptied, the fingers are stretched.
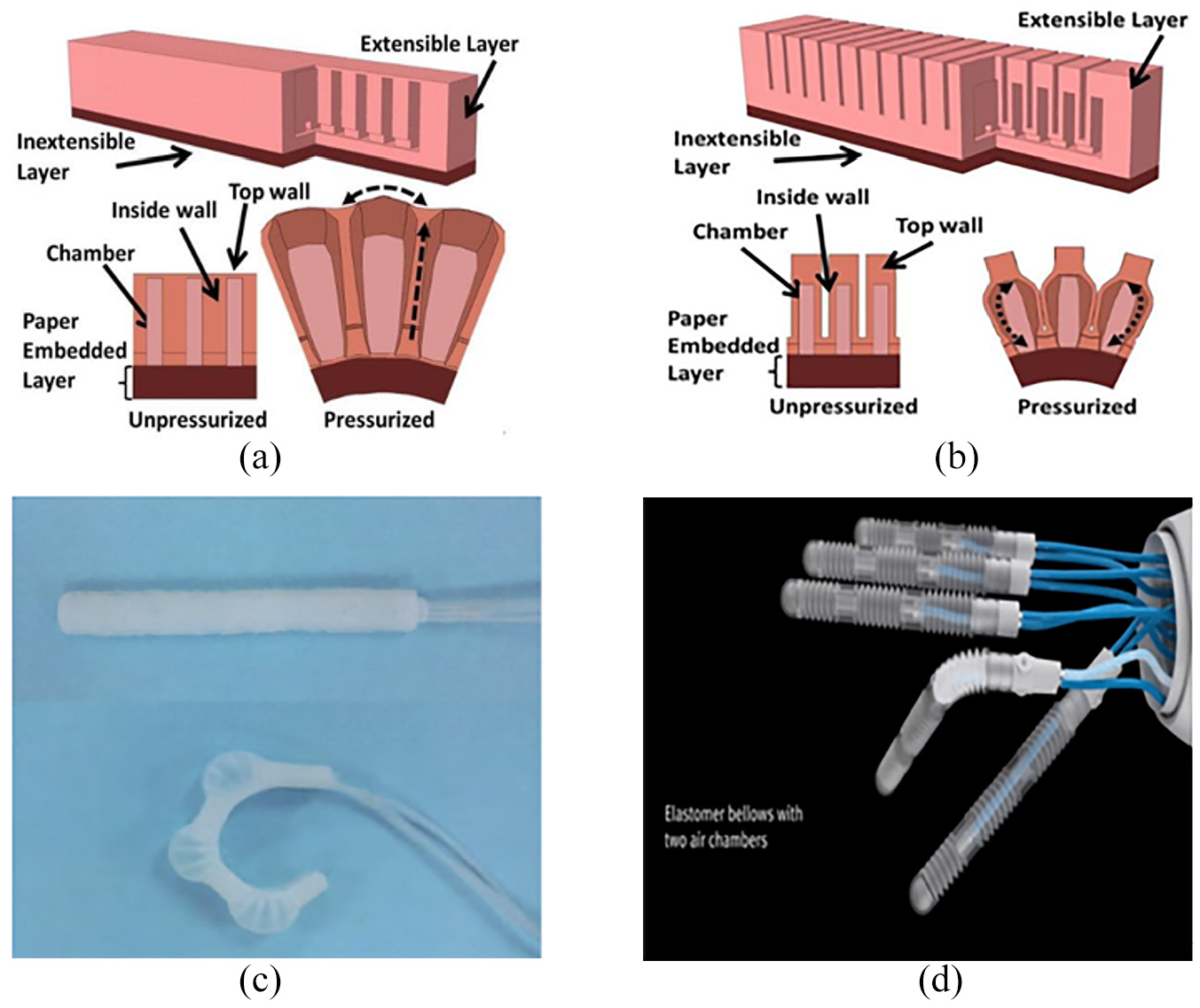
Principle and structure of flow elastic pneumatic actuator. (a) Slow fluid elasticity drive, (b) Fast fluid elasticity drive, (c) Joint fluid elastic drive, and (d) Finger fluid elastic drive.
Variable stiffness pneumatic drive
Even pneumatic flexible personification hand has high flexibility, the low grasping force is still an urgent problem to be solved at the end of the finger. Hard objects (particles, paper scraps, etc.) can be added to the chamber to increase the end force of the finger. 49 The force direction of the rigid object in the chamber is different, which can be divided into external particle variable stiffness pneumatic drive and internal force particle variable stiffness pneumatic drive. Pneumatically driven by an external particle with variable stiffness has a variable rigidity chamber and a soft drive chamber. There are hard objects inside the variable stiffness chamber near the side of the object to be grasped (Figure 4(a)). The soft-drive chamber is compressed and bent, and the variable rigidity chamber is subjected to external forces. 50 Blockage occurs when a rigid object in the finger is squeezed. Eventually, the contact surface stiffness increases and the finger grip increases. The internal force particle variable stiffness drive is suitable for the object grasping in the smaller space environment by using the blocking principle. 51 Hard particles inside the drive account for 80% of the total volume. Under normal conditions, the driver is soft and expansive, with good flexibility .It can be in greater contact with the object being grabbed. Applying negative pressure makes the particle extrude, the surface stiffness increases and the grip force becomes larger (Figure 4(b)).

Variable rigid pneumatic actuator principle. (a) External particle variable stiffness pneumatic drive and pressure jamming mechanism and force propagation and (b) Internal force particle variable stiffness pneumatic drive and assembly drawing of the positive pressure jamming gripper.
Intelligent biomimetic materials
The SMA material is deformed under the external force, and the heat is restored to its original state, so it produces force and torque.52,53 In practice, SMA are often striped or filamentous. Different SMA materials have different driving temperatures, which can reflect the temperature and current inside the system. So it is applied to the role of safety protection. By training the SMA to change the direction of the heating shape, the system changes such as torsion and bending. Wuhan University of Technology combines high strength SMA with large deformed crimp nylon. 54 The size of the nylon torsion angle of the driver is different, resulting in large deformation and different degree of driving load (Figure 5(a)). Figure 5(b) embed two SMAs of different widths inside the finger and train in opposite bending directions. 55 When driven, the full-width recovery SMA works, when recovered, A half – width recovery SMA works, the full-width recovery SMA disabled.
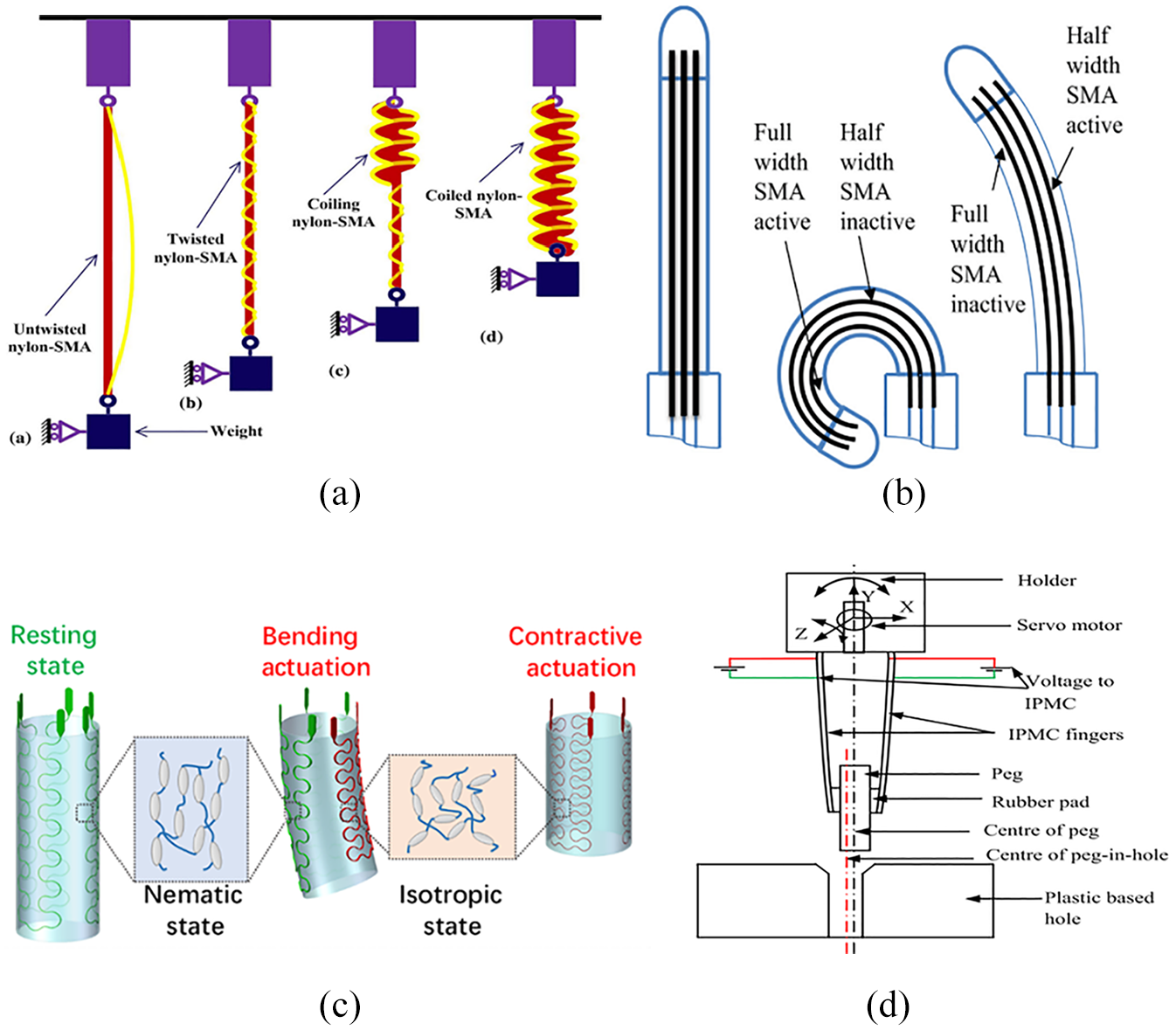
(a) Variation of torsion angle, deformation and driving load of nylon, (b) The actuation and shape recovery cycle of the SMA actuator: initial position, grasping position, and releasing position, (c) Principle of operation of LCE tubular actuators. Bending motion can be realised by applying an electrical potential to one of the heating wires (coloured red), homogeneous contraction can be obtained by applying an electrical potential to all heating wires (coloured red) and (d) Structure location and composition.
Dielectric high-elastic polymers (DE) are subjected to electric field to generate electrostatic forces on both sides of the film, which can cause area expansion and thickness decrease, and eventually cause drive.56,57 When the static power disappears, it returns to its original state. Dielectric high-elastic bodies are compliant capacitors. They will be deformed according to the electric field applied between their electrodes. 58 They are suitable for software robots, intelligent optics, and bionic machinery. According to Figure 5(c), Mihai Duduta of Harvard University in the United States has shown the built multi-layer device. 59 The device can be pre-stretched at a relatively low voltage. In addition, it closes to the power density of mammalian muscles. Moreover, the University of California designed a 3-grip liquid crystal elastomer (LCE) soft drive. 60 Each finger has three stretchable serpentine heating wires. With applying the voltages to different positions, the soft hand can produce a total of six different grasping directions.
The ionic polymer-metal composite (IPMC) has the ability to convert deformation and potential, with a solvent (Li, Na, K) of movable ions inside.61,62 When the voltage is applied, the ions move in the electric field. The material with high concentration and high pressure gradient expands on one side and shrinks on the other, thus, the whole material bends and deforms.63,64 As the IPMC material is bent and deformed by external force, the internal ions are redistributed and the polymer film ions on both sides are distributed differently, resulting in potential. Figure 5(d) show a contoured hand made of two IPMC fingers and a servo motor. Each the IPMC finger is bent under the control of two voltages, and the lateral displacement is corrected by the voltage. Servo motor is responsible for correcting the angle error that produces the pin, the tip bending of the IPMC finger will produce a force to clamp the object. 65 Changsheng Bian and others from Xi’an Jiaotong University in China designed an IPMC actuator with a three-electrode structure. An ionic electrolyte layer was added inside the IPMC to divide the solvent into two parts, which effectively distributed a higher working voltage on the polymer membrane on both sides of the actuator. It has the advantages of large deformation, high output force and higher stability. 66
Other drivers
Macroscopic movement of plants, using the concentration difference between intracellular and extracellular fluid to produce internal and external osmotic pressure.66,67 The repeated osmotic pressure difference can make the cell cycle expansion and shrink, and the plant can achieve reversible circular macroscopic motion. Plant drive applicable in rescue. The Italian Centre for Micro-Technology Biology has developed a flexible robot for variable stiffness tendrils using coils of climbing plants (Figure 6(a)). The whole system contains electroactive control units and tendrils, consisting of an active cloth carbon electrode (ACCE) and sodium sulfate. ACCE porous and microporous structures of activated carbon cloth electrode can store a large number of ions, forming osmotic pressure, and tendrils shrink and wound objects. Ions return to the solution and the tendrils expand and loosen. 68

Principles of biological and gas-liquid driving. (a) The process of the LMC robot grabbing objects with contactless heating and (b) Tendril-like soft robot based on the osmotic actuator.
Nowadays, gas-liquid phase conversion is a hot research topic nowadays. It consists of highly deformed materials with good thermal conductivity, liquid with low boiling point. The heat source is applied locally, and the liquid expands violently because of the different deformation speed of the material.70-72 In the future, how to control the heat source position and the poor thermal conductivity need to be solved urgently. Tsinghua University mixed liquid metals (gallium gallium, eutectic, EGaIn) with silicone elastomers to form liquid metal composites (LMC). LMC contains low boiling point liquid ethanol, and liquid metal loading plays an important role in the free transformation of composites (Figure 6(b)). When heated the upper and lower layers of LMC expand at different speeds, which can gradually grasp the object. 73
Structures and contrast of soft manipulators
Structures and motion pattern of soft manipulators
There are four kinds of driving for soft manipulator: cable-based underdrive, fluid-based variable-pressure drive, smart-material-based deformation drive and bio-based strain drive. The cable-based drive consists of motors, cables, skeletons and flexible materials. The cable moves through the pulley at both ends of the skeleton. The forward and reverse rotation of the motor makes the cable loose and tight to drive the finger flexion and extension, so that the flexible material is attached to the skeleton to play a safe grab role. The structure of pneumatic drive have fibre drive, fluid elastic drive, joint drive and variable stiffness drive. The fibre-driven core is the fibre reinforced layer, through the air pressure, the deformation of the limiting layer on one side of the driver is less than that on the other side, causing the finger to bend and grab. 74 The fluid elastic actuator uses the cavity to inflate the deformation, finally causes the finger side to produce the mutual extrusion to cause the bending. In order to better fit the bending of the finger and control the bending of different parts of the finger, the joint fluid driver controls the bending of different parts through the ventilation of different joints, and better improves the grip. The rigid actuator uses the hard object to be squeezed to increase the surface contact force of the soft manipulator. 75 Intelligent material is an important research direction of software manipulator, which has the characteristics of large grasping force and small structure space. By controlling the deformation under the field effect of intelligent material, such as electric field, thermal field or magnetic field, the driving body integrated design of software robot can be realised. SMA material in the external force bending, heat back to the original state embedded in the robot to achieve a certain motion. DE material under the action of electric field, when a voltage is applied on the flexible electrode, the opposite charge will be generated on both sides of the film, generating static electricity, which will cause the area to expand and the thickness to decrease, which will cause the drive. When the voltage is disconnected, the static power disappears and returns to its original state. IPMC is to use the different ion concentration inside the material to realise the bending of the material. Biological movement is an important source of scientific research. Inspired by plant winding and grasping objects, the reversible cyclic motion of plants is realised by using the size of osmotic pressure inside and outside the system.
Comparison and research status of different driving types
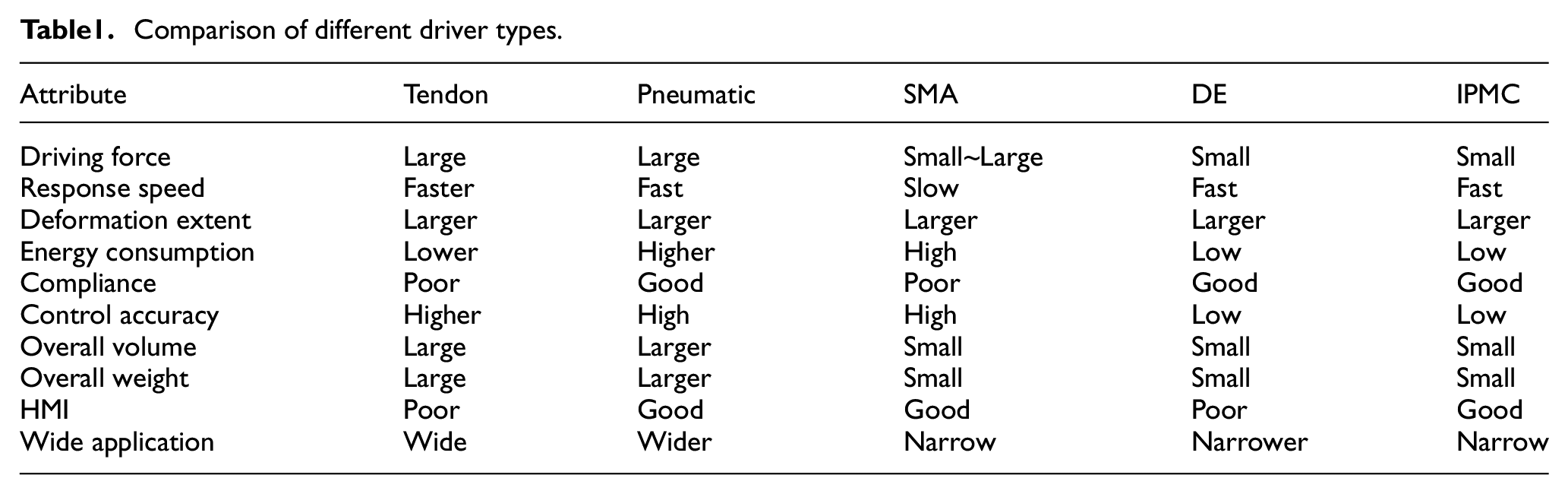
Table.1 illustrates the characteristics of five different types of drives. The tendon drive has the highest control accuracy and the fastest reaction speed among different driving types, but its compliance and human-computer safety cooperation ability are the worst. Because of the characteristics of gas cleanliness and easy availability, pneumatic drive has the widest application range, but it needs external gas supply device, so the volume and weight are the largest, which seriously limits the working space. Intelligent biomimetic material (SMA, DE, IPMC) has small volume and light mass, which has caused more and more extensive research, but the end grip is small, the application environment condition is special, and the application range is small.
Comparison of different driver types.
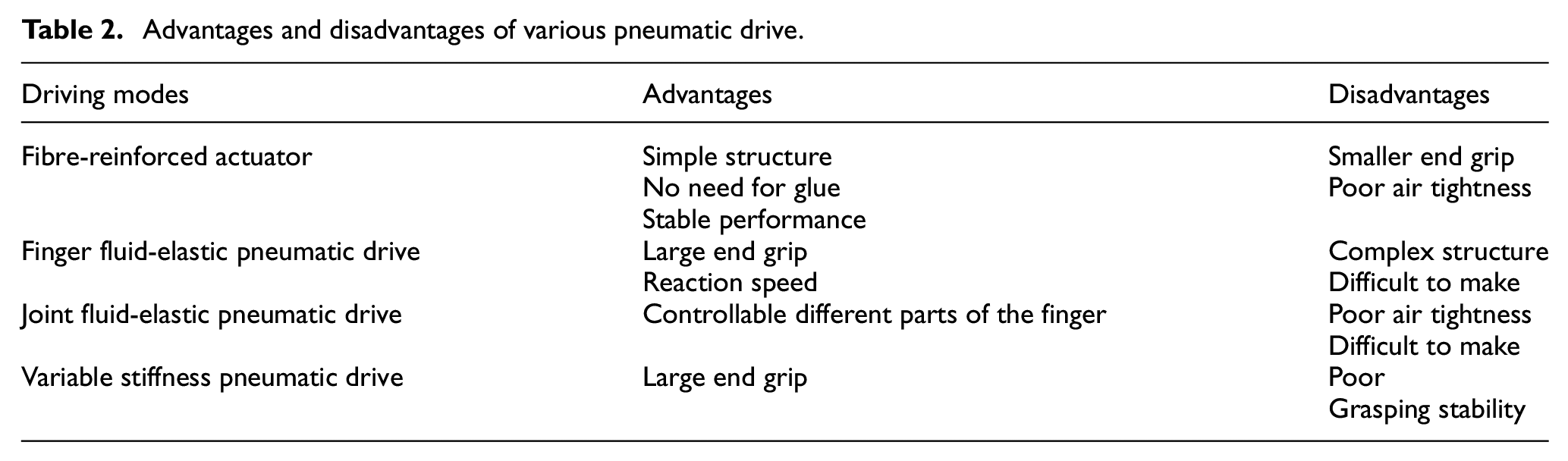
The advantages and disadvantages of four different pneumatic drive types is presented in Table 2. The fibre reinforced driver integrated production, so the structure is simple and the performance stability superiority, the later stage does not need the glue, but the air tightness is the urgent need to solve the difficult problem. The structure of the multi-cavity chamber inside the finger fluid-elastic pneumatic drive improves the end griping force, but the complexity of the structure causes great difficulty in making. To further improve the end griping force, the multi-stiffness soft hand adds hard material inside, which has a great challenge to the stability of the grasping. The joint fluid elastic aero-drive can better control the different positions of the fingers and make the fingers make more anthropomorphic actions. The sealing of the connection between multiple trachea and chamber is the biggest challenge, and it is difficult to make.
Advantages and disadvantages of various pneumatic drive.
By counting the annual volume of papers on software manipulator, it is clear that 12 years later, the annual volume shows an exponential trend, which indicates an increasing research heat in the field (Figure 7). As smart materials occupy a more and more important position in software manipulator, we have made statistics on the total amount of literature published in different periods of smart materials (Figure 8). Obviously, SMA is the first field to be studied, and the research boom of smart materials continues to increase, which is the most research direction of smart materials today. Although the research of dielectric elastic materials (DE) materials started late, but it has developed rapidly and is likely to become the most popular research field in smart materials in the future.

Number of annual issuances.
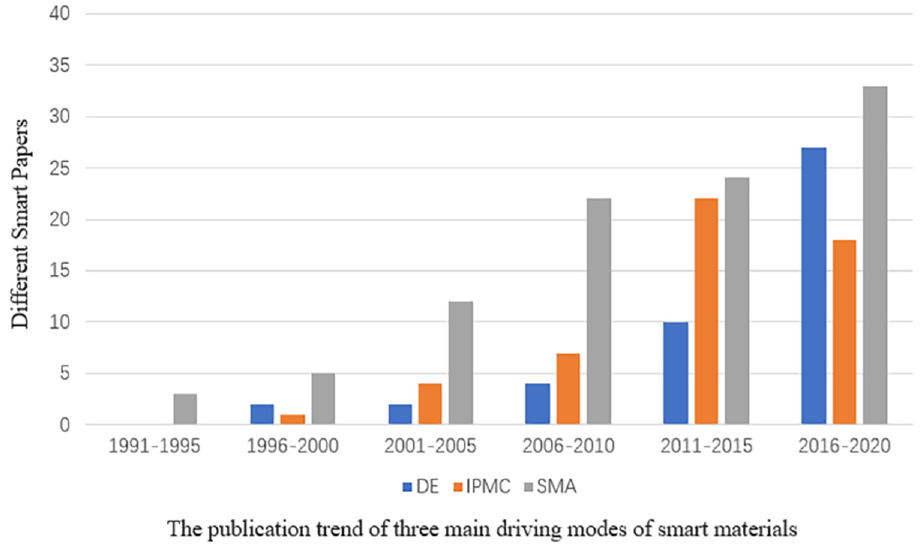
The publication trend of three main driving modes of smart materials.
Application prospect
Medical rehabilitation
Health and life monitoring is an extremely important component for human life, there are tens millions of patients with hand movement difficulties in life. The soft manipulator with safe human-machine interaction can help the patient to train and recover hand muscles, as well as daily life movement. Soft hand skin and light weight characteristics, greatly meet the comfort of patients. Surgical machines made of soft materials do not require complex force feedback controls to avoid tissue damage to the greatest extent possible.
Domesticity
Robots entering homes dramatically improve living standards. For daily life objects and interaction with people, rigid robots have great security risks. The combination of soft manipulator and some rigid robots cannot only guarantee the accuracy of control, but also have more secure human-computer cooperation.
Grab operation
Grabbing different objects is a key task for the manipulator. Fruit picking, food picking and other fragile objects contact, traditional manipulator cannot adapt, so it is an important research direction to develop a manipulator that can grasp different shapes and surface properties. The soft manipulator can cover the object well according to the shape of the object, so it has a good advantage in grasping irregular objects, especially fragile objects.
Conclusions and future trends
The safety mode of human-machine interaction has become an inevitable trend in life. The soft manipulator is a fundamental part of human-machine collaboration. The type and application of soft hands have made great progress, but they are still in the initial stage of research and development. There are still many problems in the performance and application of software operators. For pneumatic drivers, the existing fluid power source usually large and bulky. Therefore, the driving of a built-in gas source will be the focus of research. How to make the built-in air source smaller and sustainable is the focus of the study. SMA can carry on the next motion only when the heat is dissipated. How to improve the thermal efficiency and heat dissipation speed is an urgent problem to be solved. At present, the low output power of IPMC materials is an urgent problem to be solved. Increasing the thickness or reducing the length can increase the bearing capacity. In addition, although the output force and deformation can be increased, it will shorten the life of the material. Intelligent Drive is the hot research direction nowadays. Smart drivers face the challenge of large clamping force and working environment, and the application sites are greatly restricted, so it is urgent to develop new intelligent materials with multiple flexible materials fusion. The soft hand belongs to the underactuated system. The existing dynamic model is theoretically applicable but not suitable for control in practice. Therefore, we need to study the dynamic modelling method suitable for software hand control. It is adapted to the rapid design tools and manufacturing formulations of soft robots. Further development of novel algorithmic methods for controlling soft robots (considering their material properties) and development of tools specific to the device-specific programming environment, which can be better used by non-experts.
With the maturity of soft and stretchable electronics, soft hands that combine soft micro-sensors, smart electronics and electronic skin have become the trend. Smart software hand responds faster and more integrated than traditional rigid electronic equipment. Soft manipulator grips objects more flexibly and soft. The soft skin of biomaterials is better compatible with natural tissue modulus in wearable applications, and biomaterials are soft and biodegradable.76,78 In the future, fully softened and degradable software hands will be the inevitable trend. 49
Soft robots have the potential to build connections between living systems as well as multilevel artificial systems: high-level tasks, interactions between people and robots, and cognition. The key to the research is to combine the properties of various flexible materials with the deep learning of the combination of soft sensors and intelligent electronics to fuse them into the specific working environment and to improve the stability and universality of application performance. Finally realise the software hand movement and our thinking coordinated development.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to thank the financial support from the National Natural Science Foundation of China (Grant No. 61801122), the Natural Science Foundation of Fujian Province (Grant No. 2018J01762) and the Science Project of Fujian Education Department(Grant No. JK2017002).
Ethical approval
For this type of study, formal consent is not required.