
Abstract
The NanShan Radio Telescope is a 26-m fully steerable radio telescope, and it adopts a 6-UPU Stewart platform with electric motors to adjust and align the position of the subreflector. In order to analyze the actual dynamic performance and control the Stewart platform of the NanShan Radio Telescope, this article models the inverse dynamic of the Stewart platform using the virtual work approach. The model improves the accuracy of the dynamic equations and considered the pitching motion of the base platform in the practical application of the radio telescope. Dynamic simulations of the Stewart platform are implemented, the conditions of the passive rotation of the piston of actuators are considered, and the results show that the effect of the passive rotation of the pistons of the actuators is important to obtain more accurate result. The conditions of the system under the different elevation angles of the radio telescope are also considered, and the results show that the change of the elevation angles of the radio telescope has a great impact on the driving forces of the Stewart platform. It is known from the analysis that the passive rotation of pistons of actuators and the elevation movement of the primary reflector of the radio telescope are not ignorable for the precise analysis and control of the Stewart platform of the NanShan Radio Telescope.
Introduction
The NanShan Radio Telescope (NSRT) is a 26-m Cassegrain dual-reflector antenna, with a parabolic reflector as the main reflector and a hyperboloid as the subreflector. In the case of a telescope observation, a dual-reflector antenna must maintain stringent alignment of the subreflector with respect to the primary reflector. 1 However, it is inevitable for a telescope to suffer from misalignment of the subreflector with the primary reflector resulting from structural deformation due to the effect of the environmental loading, such as the gravity, temperature, and so on. A Stewart platform is a manipulator with six degrees of freedom, which has high stiffness, low inertia, high positioning precision, and large load capacity. Recently, the Stewart platform has been widely used for telescopes to actively adjust the position of the subreflector to align the primary reflector. There are some well-known successful applications for the radio telescopes, such as LMT (Large Millimeter Telescope), 2 Effelsberg, 3 ALMA (Atacama Large Millimeter Array), 4 FAST (Five-hundred-meter Aperture Spherical Telescope), 5 and so on.
Stewart platform was first proposed as a flight simulator by Stewart 6 in 1965, which consists of a moving platform, a base, six extendable actuators, and 12 joints. The extendable actuator has a rotating cylinder and a moving piston. The six actuators connect the moving platform with the base by spherical joints or universal joints. There are three kinds of structures depending on the joints the Stewart platform used: 6-SPS, 6-UPS, and 6-UPU, where U stands for the universal joint, S for the spherical joint, and P for the prismatic joint. For the 6-UPU Stewart platform, an actuator is connected to the moving platform and the base by two universal joints.
For design and control of the Stewart platform, the accurate dynamic model is very essential. The dynamic modeling of parallel manipulators is quite complicated due to the closed-loop structure. 7 Several methods for the inverse dynamics have been proposed, including the Newton–Euler formulation,8,9 the Lagrangian formulation,10,11 the Kane method,12,13 the screw theory, 14 the Hamilton method, 15 and the virtual work approach.16,17 In some cases, different methods may be combined to obtain better result, for example, Zanganeh et al. 18 used both the Lagrangian and Newton–Euler approaches. Gallardo et al. 14 combined the screw theory with the principle of virtual work. Although the derived equations for the dynamics of parallel manipulators present different levels of complexity and computational loads, the results of the actuated forces computed by different approaches are equivalent. The main goal of recent proposed approaches is to minimize the number of operations involved in the computation of the manipulator dynamics. Zhang and Song 19 and Mahmoodi et al. 20 have made a thorough analysis of the computational cost of the different formulations. Kalani et al. 21 compared virtual work approach with the Newton–Euler method and the Lagrange formulation, and the virtual work approach is more straightforward and systematic resulting in more concise dynamic equations.
The earlier studies mainly focused on the dynamics of the 6-UPS or 6-SPS Stewart platform, and a few investigations were about the inverse dynamic of the 6-UPU Stewart platform. The 6-UPU Stewart platform has universal joints at both ends of legs, the platform’s carrying capacity is improved, and the piston of the actuator not only slides at the connection with cylinder but also has a passive rotation about the leg axis, so there is a force produced by the passive rotation of the piston relative to the cylinder. The passive rotation of the piston is often neglected in some dynamic models, and approximated as a 6-UPS Stewart platform, which brings errors. However, radio telescopes often require high accuracy, so it is important to improve the accuracy of the dynamic equation of the dynamic model. In this article, the principle of virtual work is employed to solve the inverse dynamic of the 6-UPU Stewart platform for the radio telescope. The force caused by the passive rotation of the piston is considered in our dynamic model, which improves the accuracy of the dynamic model. Since the Stewart platform is connected to the primary reflector of the radio telescope, the elevation movement of the primary reflector is taken into account in our model.
NSRT subreflector system description
As shown in Figure 1, the NSRT is a 26-m diameter, dual-reflector (Cassegrain) antenna. This antenna has a parabolic reflector and a hyperboloid. And the antenna focuses the radio waves by utilizing two reflectors, which means that the subreflector must keep high position and orientation accuracy. In this work, a 6-UPU Stewart platform is used to obtain desired position and orientation of the subreflector. The moving platform of the Stewart platform connects the subreflector, and the base platform is fixed to the primary reflector by four supporting legs. Therefore, while adjusting the pose of the subreflector, the Stewart platform follows the primary reflector in elevating motion. The elevation range of primary reflector during observations is

The NSRT employs a Stewart platform as a subreflector positioner.
As shown in Figure 2, the Stewart platform for the NSRT consists of a base platform, a moving platform, and six extendable actuators. Throughout this article, we assume that the base platform and the moving platform are both rigid and all six legs are identical. As shown in Figure 3, the piston of ith (i = 1,2,3,4,5,6) leg is attached to the moving platform with an universal joint at point

where c and s represent the cosine and the sine, respectively.
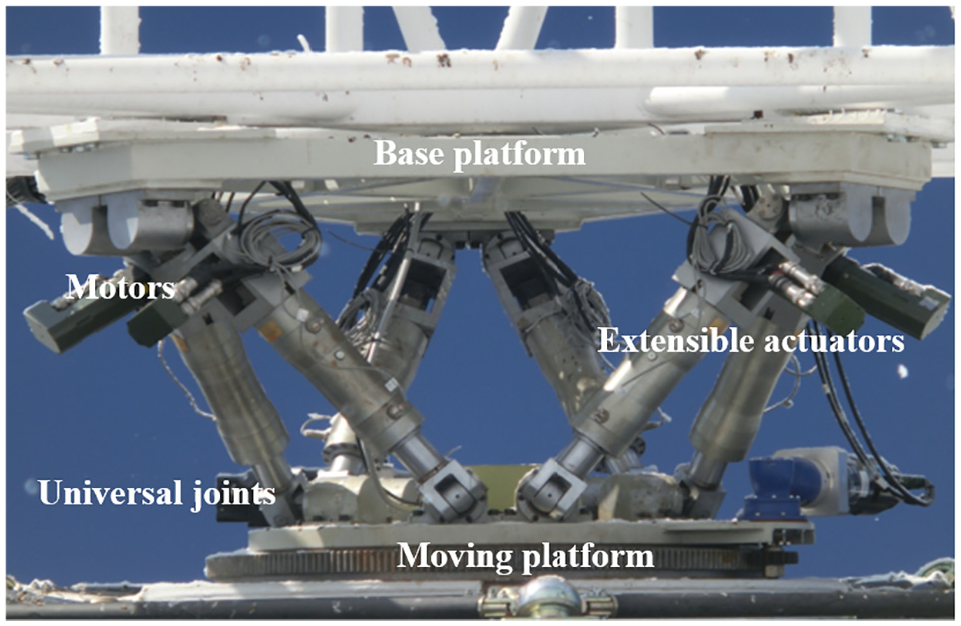
The 6-UPU Stewart platform of the NSRT.
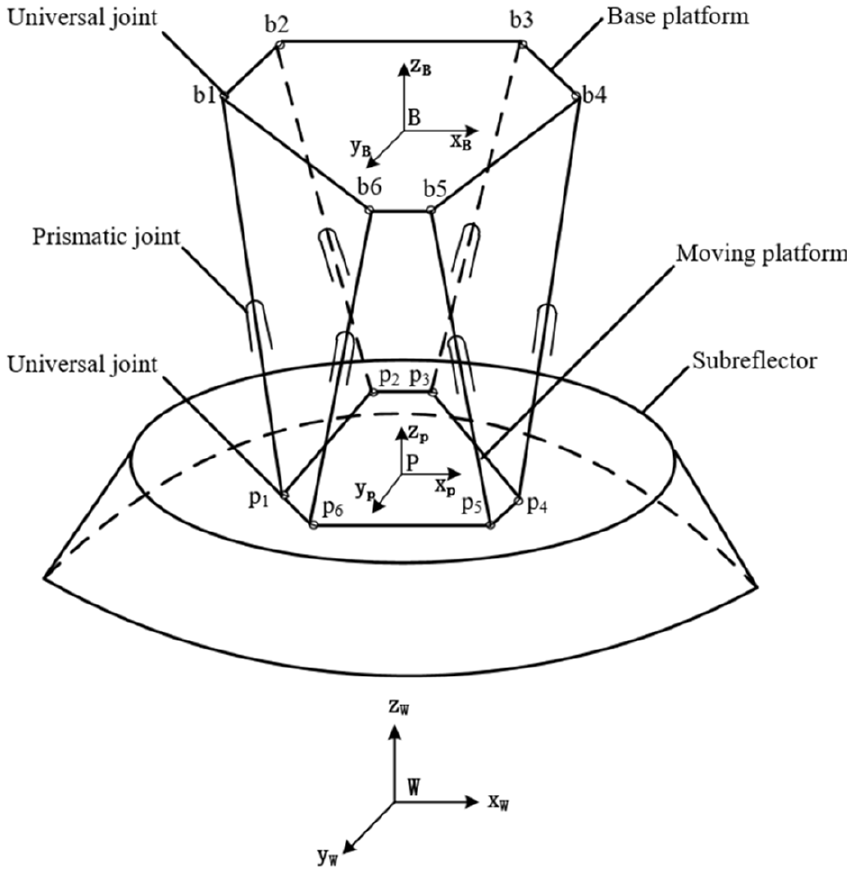
The 6-UPU Stewart platform.
While the NSRT tracking extraterrestrial sources and satellites, the primary reflector of the antenna elevates

where

Definition of geodetic reference coordinate.

Coordinate systems of the Stewart platform.
Inverse kinematics analysis
Inverse position analysis
Figure 6 represents vectors and coordinate frames used for the kinematic issue of the 6-UPU Stewart platform. For each kinematic chain, a closed vector-loop equation can be written as follows

where


The Stewart platform leg construction.
For the ith leg, the leg length

where

As shown in Figure 6, an actuator consists of two bodies: the rotating cylinder and the moving piston. The rotating body, with mass


As shown in Figure 7, each leg connects to the base platform by a universal joint, and the rotation matrix which transfers leg frame

and the unit direction vector of leg i in the frame B is

where

The Stewart platform leg coordinate.
Inverse velocity analysis
The generalized speed vector is defined as follows

where


The linear velocity of the center of point

where

the velocity of ith leg

The velocity of

Since the 6-UPU Stewart platform has universal joints at both ends of legs, the piston of the actuator not only slides at the connection with cylinder but also has a passive rotation along the leg axis, so this part moves with cylinder as well as rotate about the leg axis. Previous literature often neglects the passive rotation of the piston, and assumes that the angular velocity of the cylinder

by substituting

We assume that the cylinder does not spin about its own axis, which implies that

then
where
The velocity of the center of mass of ith cylinder is found by differentiating equation (7)

and the velocity of the center of mass of ith piston is found by differentiating equation (8)

Inverse acceleration analysis
The linear acceleration of moving platform is

the acceleration of

expression

the acceleration of

expression

since the cylinder does not spin about its own axis, cross product of equation (27) with

the accelerations of the mass centers of the cylinder and piston can be obtained by differentiating equations (22) and (23)


Jacobians
The Jacobian matrices are required in order to write the equation of motion of platform in compact form. Writing equation (14) in matrix form yields

where

Substituting equation (33) into equation (15) yields

where
and
Equation (16) can be written for each leg, and then assembled in matrix form

where

And equations (20)–(23) in matrix form yield


where

Dynamic model
Tsai 16 proposed an explicit dynamic model for the Stewart platform used the virtual work approach, and we employed the virtual work approach to model the inverse dynamic of the 6-UPU Stewart platform for the NSRT. Because Tsai has given the detailed derivation of this part with result shown below

where

where

where


where
When

Simulation
In this section, a simulation study is performed to demonstrate the performance of the proposed mathematical inverse dynamic model of the Stewart platform for the NSRT.
The physical parameters used in this simulation study are obtained by three-dimensional (3D) model of the NSRT in PROE as follows. Position vectors of universal joints

The azimuth angle of the radio telescope

Gravity centers of the cylinder and piston for all legs

Mass of the moving platform, cylinder, and piston of all legs

Moments of inertia of the cylinder and piston of all legs as well as the moving platform

In order to explore the impact of the passive rotation of the piston to the inverse dynamic of the 6-UPU Stewart platform, dynamic simulation of the system both with and without considering the passive rotation of the piston is presented. The model that considers the passive rotation of the piston is called the complete dynamic model, and the model that does not consider the passive rotation of the piston is called the simplified dynamic model. The elevation angle of the primary reflector of the radio telescope is

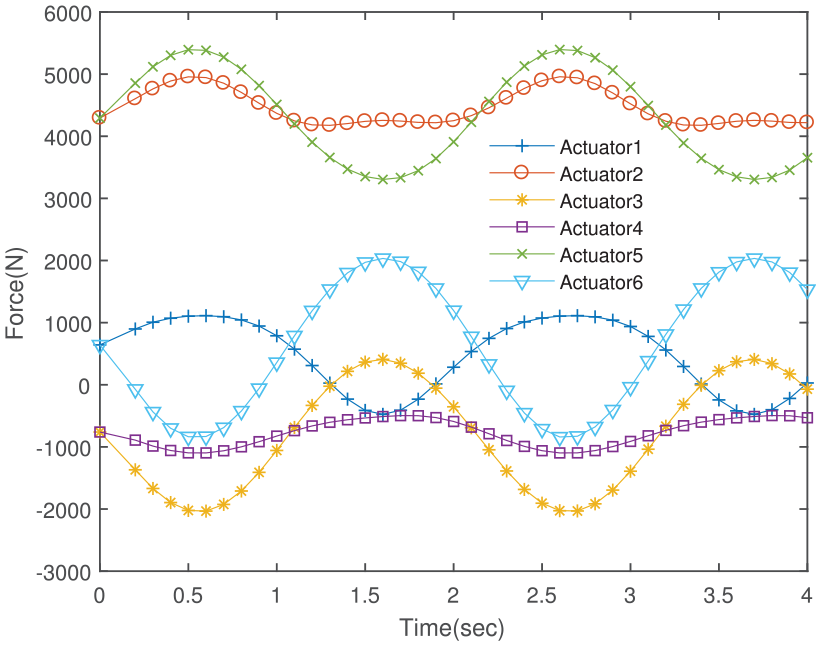
Figure 8 shows the comparison of the driving forces of six extendable actuators obtained by the complete dynamic model and the simplified dynamic model. Each figure shows visible difference between two cases, especially in Figure 8(b) the actuator 2 has significant difference between the driving forces obtained by the complete dynamic model and the simplified dynamic model, which means that the passive rotation of the piston which is not considered in the simplified dynamic model has an influence on the dynamic model of the 6-UPU Stewart platform.

Driving forces of six extendable actuators obtained by the complete dynamic model and the simplified dynamic model: (a) actuator 1, (b) actuator 2, (c) actuator 3, (d) actuator 4, (e) actuator 5, and (f) actuator 6.
To explore the impact of the change of the elevation angle of the primary reflector for the dynamic model, dynamic simulations that compare the inverse dynamic of the system under different elevation angles are presented. And the given elevation angles of primary reflector of the radio telescope are
Driving forces of six extendable actuators while

Driving forces of six extendable actuators when
Driving forces of six extendable actuators when

Driving forces of six extendable actuators when
Conclusion
This study models the inverse dynamic of the 6-UPU Stewart platform for the NSRT using the virtual work approach. The dynamic model improves the accuracy of the dynamic equations and considered the pitching motion of the base platform in the practical application of the radio telescope. Simulation results indicate that the effect of the passive rotation of the pistons of the actuators is important to obtain more accurate result. And the driving forces required for the Stewart platform to move along same trajectory with different elevation angles are compared. The results show that the elevation motion of the radio telescope has a great impact on the dynamic of the Stewart platform, and the larger elevation angle of the radio telescope, the greater driving forces are required for the extendable actuators to drive the Stewart platform. The model can be used in the precise analysis and control of the Stewart platform of the NSRT.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Basic Research and Development Program (grant no. 2018YFA0404702) and the Chinese Academy of Sciences (CAS) “Light of West China” Program (grant no. 2017-XBQNXZ-B-021). This work was also partly supported by the Operation, Maintenance, and Upgrading Fund for Astronomical Telescopes and Facility Instruments, budgeted from the Ministry of Finance (MOF) of China and administrated by CAS.