
Abstract
A six-wheel vehicle chassis scheme with a variable wheelbase is proposed to improve the lateral dynamic performance of vehicles. The yaw moment is varied by changing the wheelbase to enhance the lateral dynamic performance of the vehicle. A vehicle lateral dynamics model is established using this approach. The effects of the wheelbase variation on the lateral yaw rate gain, steering stability, and steering error are analysed via numerical calculations. A strategy for wheelbase variation under different working conditions is proposed to enhance the lateral dynamic performance. In addition, by studying the response of the vehicle to various lateral disturbance forces, it is verified that the wheelbase change can enhance the lateral anti-disturbance capability of the vehicle. The simulation verifies the effectiveness of the wheelbase change strategy under a variety of driving conditions.
Keywords
Introduction
The main factors that affect a vehicle’s lateral dynamic performance include the vehicle’s handling stability, its steerability, and its lateral anti-disturbance resistance. As the driving speed of a vehicle increases, the lateral dynamic performance becomes increasingly important to the performance of the vehicle. To ensure vehicle stability during operation, a vehicle yaw moment control system was developed as early as the 1980s. The function of this yaw moment control system is to help the vehicle maintain a stable driving state during sharp turns or in the case of a lateral disturbance to prevent vehicle rollover or fishtailing, and to avoid accidental casualties being caused by an out-of-control vehicle. At present, yaw moment control systems are mainly divided into two types: direct yaw moment control and indirect yaw moment control systems. The direct yaw moment control system is realized by differential braking of the vehicle wheels. Use of the brake system to control the longitudinal force of the tyres and the subsequently generated yaw moment can change the yaw motion of the vehicle.1,2 With the advent of distributed drive vehicles, a new approach was introduced to achieve direct yaw moment control that consisted of changing the longitudinal force of the tyre by controlling the driving torque of each wheel rather than braking.3,4 This method relies on the adhesion of the tyre to the ground. When the vehicle is driving on a slippery road, direct yaw moment control does not achieve the desired effect. 5 An indirect yaw moment control system realizes changes in the longitudinal direction of the tyre by controlling the steering angle of the wheel, thereby changing the yaw moment and thus controlling the yaw motion of the vehicle. 6 The indirect yaw moment control system can avoid the drawbacks associated with the direct yaw moment control system because it is not subject to road surface adhesion. However, the anticipated control effect cannot be achieved in the nonlinear operational region of the tyre. Therefore, both yaw moment control systems have limitations.
To overcome the shortcomings of both the direct and indirect yaw moment control systems, many researchers have investigated a variety of advanced control algorithms, including model tracking control,7,8 sliding mode control,9,10 and fuzzy logic control.11,12 Although these advanced control algorithms do improve the performance of the traditional yaw moment control systems, their effects are not ideal. In contrast, changing the way in which the yaw moment is generated will produce better results. In recent years, various researchers have proposed improved schemes that combine direct yaw control with indirect yaw control.13–17 Although these combined schemes can improve the control efficiency, they still have the shortcomings of both control methods. To address and overcome these issues, a completely different control method must therefore be designed. To apply an active suspension, Amir 18 added a vertical actuator to the middle of a three-axle vehicle and changed the load distribution on each axle using this actuator to generate a yaw moment. The method uses the active suspension characteristics to improve the vehicle’s lateral dynamic performance according to the road conditions; however, the vertical actuator requires large quantities of energy to achieve the desired control effect. In a later study, Amir 19 proposed a four-wheeled vehicle with a variable wheelbase. Each wheel of the proposed vehicle can move longitudinally relative to the vehicle body and a yaw moment is generated by this longitudinal motion of the wheel. The energy consumption of this yaw control method is low and it also avoids the shortcomings of the direct and indirect yaw moment control modes. Although this invention is relatively innovative, it lacks a corresponding structural design because only a configuration assumption has been proposed to date. Furthermore, the method cannot be applied to conventional vehicles equipped with mechanical transmission shafts, which diminishes the method’s practicality.
All the yaw control systems mentioned above correct the vehicle operation when the vehicle steering is at risk of instability, but they also have inevitable problems, including response lag and control errors. Unlike a conventional yaw control system, the variable-wheelbase chassis proposed in this paper can change the vehicle structural parameters based on the driving conditions. This can improve the lateral dynamic performance of the vehicle and enhance the vehicle’s adaptability to different road conditions. Therefore, the proposed variable-wheelbase chassis can realize real-time adjustment of the yaw motion and can also enhance the vehicle’s handling and driving stability by changing the dynamic characteristics in advance.
A wheelbase adjustment mechanism and the mechanical structure of the chassis were designed according to the proposed wheelbase variable chassis scheme. Using vehicle dynamics theory, the vehicle motion equations on the ground and the vehicle body coordinate systems were established. The effects of wheelbase change on the vehicle’s steering stability and steering error were then analysed using the equations of motion to provide a theoretical basis for the wheelbase change strategy under various driving conditions. The corresponding wheelbase change strategy was then adopted based on differing driving needs to improve the vehicle’s steering stability and enhance the vehicle’s lateral dynamic performance. In addition, the vehicle’s lateral anti-disturbance resistance was analysed for the different middle axle positions. Simulations were performed under a variety of driving conditions to verify both the theoretical analysis and the effectiveness of the wheelbase variation strategy.
Configuration of variable-wheelbase chassis
The chassis structure is shown in Figure 1. Each wheel is driven using a hub motor that is mounted inside the wheel. The wheel assembly is then connected to the frame through an independent double-wishbone suspension. The elastic components of the suspension are oil and gas springs. Both the front and rear axles are equipped with an independent steering mechanism, and the steering mechanism varies the steering angle of the wheel by expansion and contraction of a hydraulic cylinder. The middle axle can be moved longitudinally along the frame via a wheelbase adjustment mechanism. Figure 2 shows the main structural parameters of the vehicle. The meanings and values of each vehicle parameter are listed in Table 1.

Chassis structure.

Variable-wheelbase concept.
Technical parameters of vehicle.

Vehicle lateral dynamics model
During steering at high speeds, the actual wheel direction is no longer aligned with the intended wheel direction because of the lateral elastic deformation of the tyre. 20 In this case, analysis of the vehicle’s lateral motion requires use of a dynamic model rather than a kinematic model. Because of the differences between observation of the vehicle motion from the vehicle and observation from the ground, independent coordinate systems that were fixed to the ground and to the vehicle were established separately to describe the motion of the vehicle. Different dynamic equations were then established based on each coordinate system.
Dynamic equation based on vehicle coordinate system
The model of the variable-wheelbase vehicle is shown in Figure 3, where

Vehicle motion in vehicle coordinate system.
As shown in Figure 3, the tyre side yaw angles for each axle can be expressed as follows:






Therefore, the respective lateral forces of the front, middle, and rear axle wheels can be expressed as follows:



When the slope of the road is ignored, the force equation along the y-axis can be expressed as follows:

where ay is the inertial acceleration at the vehicle’s centre of mass in the y-axis direction, and Fyf, Fym, and Fyr are the lateral forces of the tyres on the front axle, the middle axle, and the rear axle, respectively.
By substituting

The yaw dynamics equation can be obtained based on the torque balance around the z-axis, as follows:

By substituting for the lateral force expressions, we then obtain the following relationships:


Equations (13) and (14) are the basic equations of motion required to describe the plane motion of the proposed vehicle. These equations can be written as a state equation model as follows:

where

Dynamic equation based on ground coordinate system
During the vehicle steering process, the longitudinal and lateral directions of the vehicle change continuously with respect to the coordinate system fixed to the ground. Therefore, it is convenient to describe the vehicle’s steering motion in a coordinate system that is fixed to the vehicle when traveling along a straight path. As shown in Figure 4, the direction of the straight road surface is the X-axis, and the direction perpendicular to this direction is the Y-axis. The parameter

Vehicle motion in ground coordinate system.
The equation of motion of the vehicle’s centre of mass in the Y direction can then be expressed as follows:

The yaw motion of the vehicle can be expressed as follows:

Using the same derivation process that was used for the equation of motion in the vehicle coordinate system, the equation of motion in the ground coordinate system can then be obtained as follows:


A Laplace transform can then be obtained from equations (18) and (19), as follows:

Analysis of steerability and handling stability
The handling stability and the steerability are two dynamic vehicle characteristics that are difficult to balance with each other. Oversteer vehicles have high handling stability but poor steerability, while understeer vehicles have high handling stability but poor steerability. This study therefore attempts to solve the contradiction between the handling stability and the steerability by varying the wheelbase to modify the vehicle’s steering characteristics according to the actual demands of driving. To obtain an accurate wheelbase adjustment method, it is necessary to analyse the influence of the change in the wheelbase on the steering performance.
Analysis of steerability
When the vehicle enters a driving state on a smooth curve at a constant speed,
After mathematical calculations, the steady-state yaw rate gain is determined as follows:

For the variable-wheelbase vehicle proposed in this paper, it is necessary to specify that lf and lr are fixed values during the calculation and do not contain unknown variables. When lm is to the front of the centre of gravity (CG), it has a positive value, but when the middle axle is to the rear of the CG, lm has a negative value. Because the value of lm is variable, the yaw rate gain can be then changed by adjusting the position of the middle axle. As shown in Figure 5, the relationship between the yaw rate gain and the positional adjustment of the middle axle can be obtained by substituting the vehicle’s structural parameters into equation (22) for the numerical calculations.

Relationship between yaw rate gain and variation of the middle axle position.
The expression for the yaw rate gain can be written as follows:



where Lef is the equivalent wheelbase and Kus is the stability factor. When the expression for Kus is calculated, the denominator is always negative; therefore, the sign of the stability factor Kus is opposite to the sign of the numerator. By substituting the vehicle parameters into equation (24) to perform the numerical calculations, we can obtain the relationship between the stability factor and the middle axle position adjustment, as shown in Figure 6. This figure shows that when the middle axle position is not adjusted, the vehicle then exhibits neutral steering (Kus=0). When the middle axle moves forward (i.e. lm>0), the vehicle exhibits oversteering (Kus<0) and when the middle axle moves backward (i.e. lm<0), the vehicle then exhibits understeering (Kus>0). The relationship between the equivalent wheelbase and the middle axle adjustment is shown in Figure 7. When the middle axle is in its initial position, the equivalent wheelbase has the smallest value, and as the wheelbase adjustment increases in either direction, the equivalent wheelbase value increases.
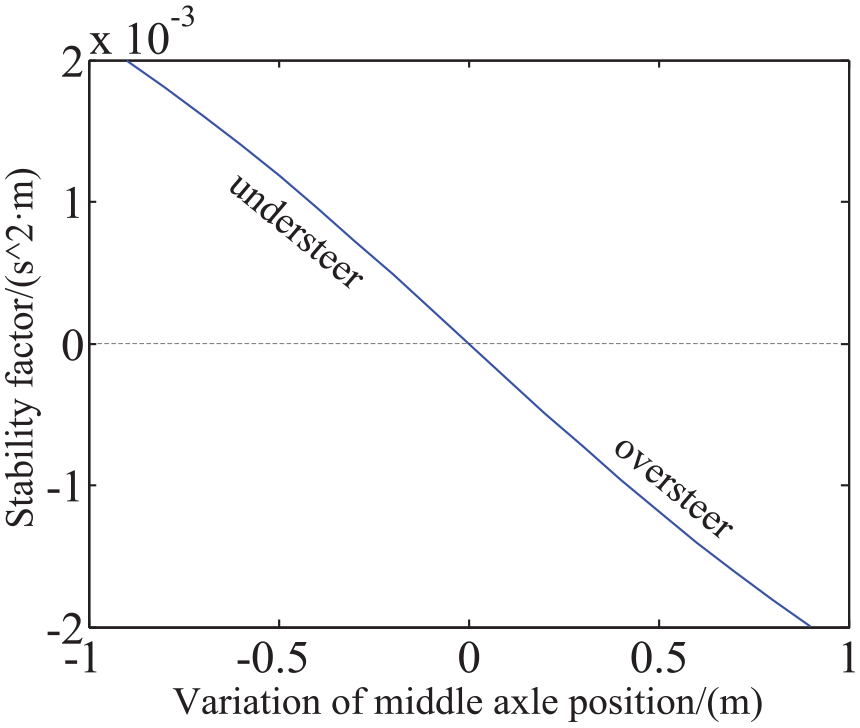
Relationship between stability factor and variation of the middle axle position.

Relationship between effective wheelbase and variation of the middle axle position.
Analysis of handling stability
The vehicle motion characteristics can be obtained from equation (20), as follows:

Equation (26) can then be expressed as follows:

Equation (27) is the characteristic equation of the system, where the following relationships hold:


The system is represented by the characteristic equation (27), which gives a response that can be represented by

The system’s transient response characteristics and its stability both depend on the root of the characteristic equation. Therefore, the transient response characteristics and the stability of the vehicle can be classified as follows, using the values of
1) If
2) If
3) If
Therefore,

Equation (31) can be satisfied if

By substituting the vehicle parameters from Table 1 into equation (32), the relationship between the critical velocity and the variation of the middle axle position can be obtained as shown in Figure 8. As the figure shows, the critical speed decreases as the middle axle moves further forward. This indicates that the vehicle’s traveling stability is weaker, which is consistent with the yaw rate gain case shown in Figure 5. Additionally, Figure 5 shows that the yaw rate gain increases as the middle axle moves further forward; i.e., when the middle axle moves forward, the steerability of the vehicle is enhanced but its stability degrades. Similarly, Figure 8 is also consistent with Figure 6, which indicates that the stability factor tends to become negative when the middle axle moves forward.

Relationship between critical velocity and variation of the middle axle position.
Analysis of Steering Error
Steering stability and lane-keeping are two major problems in vehicle steering control. 21 The steering stability of a three-axle vehicle with a variable wheelbase was investigated as described above. This section describes the investigation with regard to the effect of the variable wheelbase on the vehicle’s lane-keeping ability. Two new variables are defined for the lateral dynamics model here: the distance from the centreline of the lane to the CG of the vehicle e1, and the vehicle directional error relative to the lane e2. If the vehicle is assumed to travel at a constant longitudinal speed on a curved road with a large radius R, the theoretical rate of directional change of the vehicle is defined as:

The theoretical acceleration of the vehicle can then be expressed as:

Therefore,

Using equations (34) and (35), equations (13) and (14) can be converted as follows:


The state model of the tracking error can be expressed as:

where
The open-loop matrix A has two unstable eigenvalues and the system requires feedback to stabilize the matrix. The state feedback rule is used here as follows:

The state space model of the closed-loop lateral control system can be expressed as:

If the system’s initial state is 0, then the Laplace transform can be used to convert equation (40) as follows:

Application of the final value theorem allows the steady-state tracking error to be expressed as:

After various mathematical operations are performed, the final form of the steady-state tracking error can be expressed as follows:

where

From equation (43), it is known that the lateral position error can be set at 0 by setting an appropriate value for the state feedback matrix. However, K does not affect the steady-state angular error. The steady-state angular error can be expressed as:

If

The analysis above shows that an error in the steady-state direction angle always exists as a fixed value for vehicles with an invariable structural parameter. However, in the proposed variable-wheelbase vehicle, the direction angle error during steady-state steering can be reduced by adjusting the middle axle position to enhance the lane-keeping ability of the vehicle. Figure 9 shows the relationship between the variation of the middle axle position and the direction angle error, which can be obtained by substituting the vehicle parameters given in Table 1 into equation (46). The magnitude of the steady-state direction error varies with changes in the middle axle position. The direction angle error is reduced significantly when lm changes from a positive to a negative value. The steady-state direction angle error is 4.4° when lm is 0, but the steady-state direction angle error is reduced to 3.2° after the middle axle moves backward by 0.5 m, and when the middle axle moves further back, the direction angle error continues to decrease in a linear manner.

Steady-state steering direction angle error.
Analysis of lateral anti-disturbance resistance
The previous section discussed the vehicle motion characteristics under the control input. In the absence of the steering input, the vehicle should theoretically maintain a straight-line driving state. However, under actual driving conditions, the vehicle will inevitably be subject to external disturbances, e.g. wind, and undesired motion. This section describes the vehicle motion under the action of external lateral forces to enable further analysis of the characteristics of the vehicle dynamics.
Vehicle motion under stepped lateral force
When a vehicle is traveling on an inclined road surface, the lateral component of its force due to gravity becomes the lateral force Y acting on the vehicle’s centre of mass, as shown in Figure 10. If the vehicle travels on a slope for a long time, i.e., if the lateral disturbance force Y is exerted for a long time, the vehicle will deviate from its original path even if this force is small.

Vehicle being subjected to lateral force.
Assuming that the steering angle of the vehicle is 0°, then according to equations (13) and (14), the equation of motion of the vehicle under the action of the lateral force can be expressed as:


By performing Laplace transforms on equations (47) and (48), the responses of the vehicle’s yaw angle


where
The parameters


The previous analysis showed that the vehicle driving direction remains stable when the vehicle speed is lower than the critical speed (
To calculate the values of equations (52) and (53), we constructed the numerical calculation model shown in Figure 11. The model input was the lateral force step input, which occurs at 0.5 s, and where the lateral force is 4,000 N and the vehicle is traveling at 40 km/h. The steering angle was 0° and the model simulated the response of the vehicle when subjected to a stepped lateral force, whereby the force increases only once.

Numerical calculation model developed in Simulink.
The run time for the numerical calculation model was 4 s, and the vehicle yaw rate and the CG position change are shown in Figure 12(a) and (b), respectively. As the figure shows, the yaw rate increased rapidly from 0 when the vehicle was subjected to the lateral force at 0.5 s. The yaw rate reached a steady value after 1 s, which indicates that the vehicle had entered a steady state. With this yaw motion, the lateral position of the vehicle also changed; the vehicle shifted to one side and the offset increased over time.
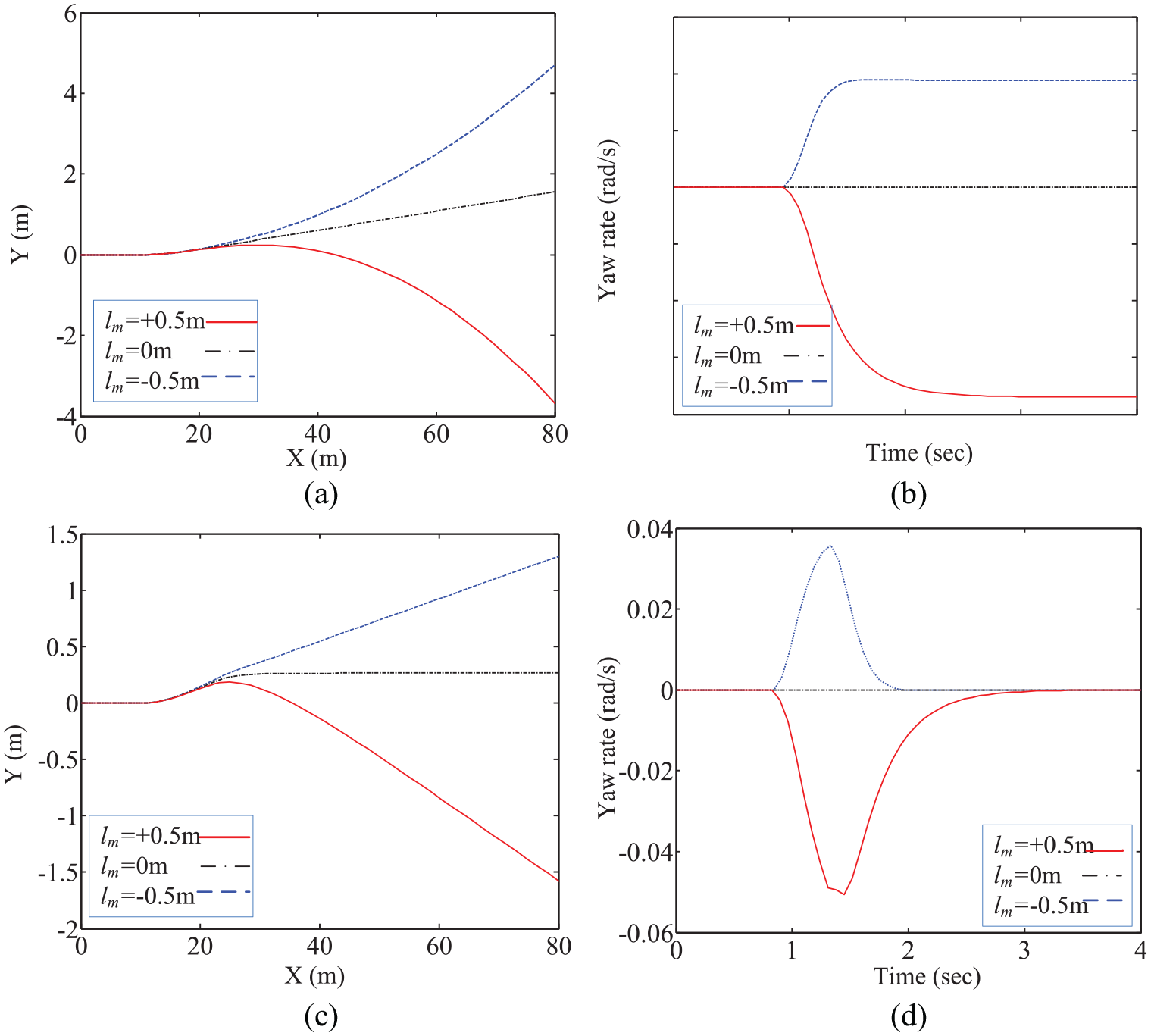
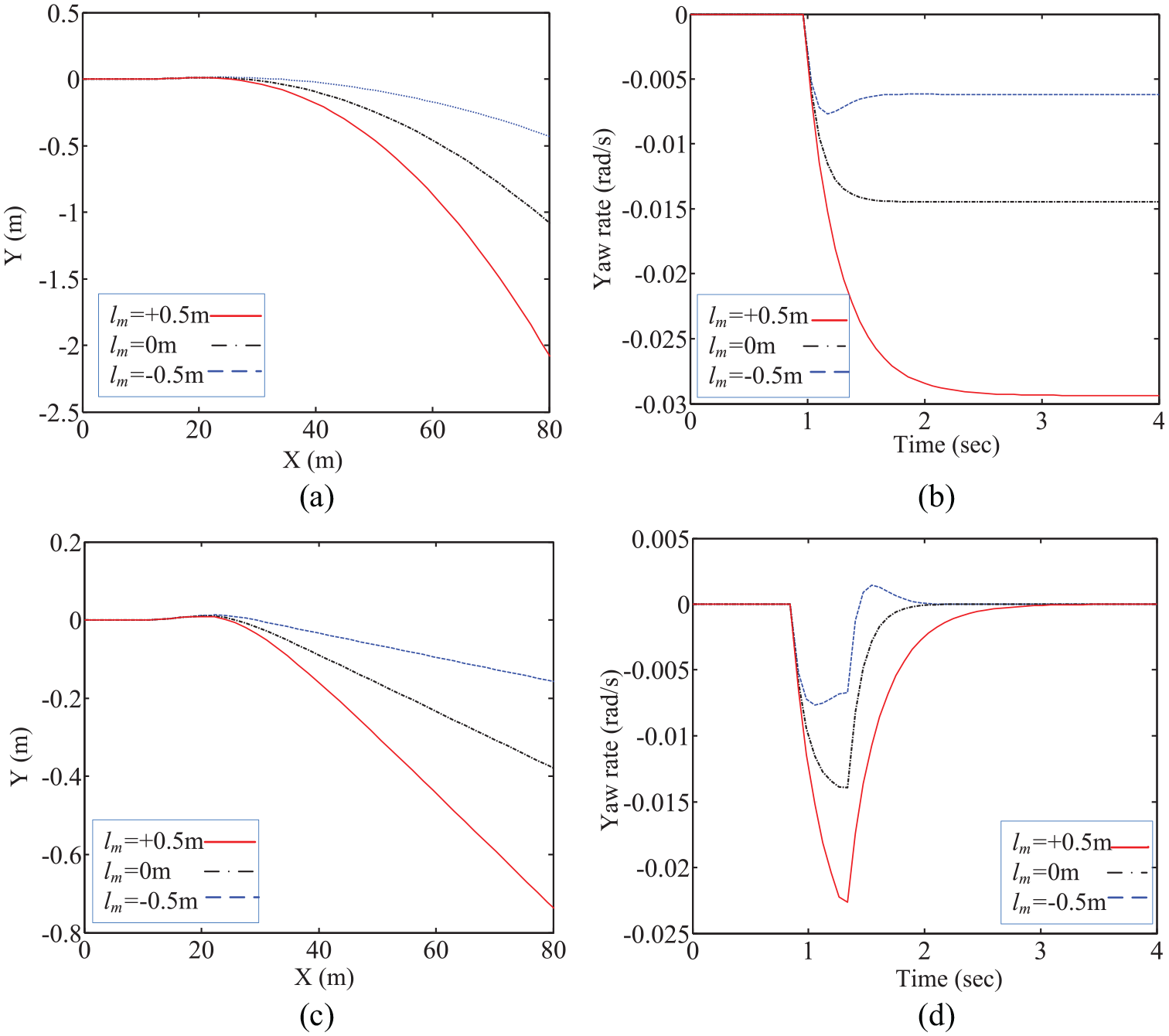
Vehicle responses under the action of lateral forces: (a) position of CG under stepped force; (b) vehicle yaw rate under stepped force; (c) position of CG under pulsed force; (d) vehicle yaw rate under pulsed force.
Figure 12 shows that the yaw rate was lowest when the middle axle was in the initial position, while the yaw rate was highest when the middle axle was in its forward-most position with the lateral stepped force acting on the CG. Therefore, the vehicle has better anti-disturbance resistance when the middle axle is in its initial position because this position creates neutral vehicle steer. In this situation, the lateral disturbance acting on the centre of mass of the vehicle and the lateral force from the tyres do not generate a yaw moment around the centre of mass of the vehicle. When the middle axle is not in its initial position, the vehicle is in either understeer or oversteer, and the neutral turning point then no longer coincides with the centre of mass. The lateral disturbance force and the lateral force of the tyre will then produce a yaw moment that increases the yaw motion of the vehicle.
Vehicle motion under pulsed lateral force
In the previous section, we discussed the case of a stepped lateral force acting on the vehicle. However, such a continuously applied force is unlikely in the real world, so in this section, we discuss the case of a discontinuous pulsed force acting on the vehicle. This represents a more practical situation for a vehicle traveling on a partially inclined road. We assume that the time

When


where

and
The final value theorem of the Laplace transform can then be used to obtain the steady-state values of the lateral displacement of the CG, and the vehicle’s longitudinal direction angle can also be obtained.
If

If
From equations (60) and (61), it can be seen that
Figure 12(c) and (d) present the results obtained from the calculation model after the input signal of the Simulink model was changed to a pulsed input signal. The figure shows that the response to the pulsed lateral force is similar to the response to the stepped lateral force. When the middle axle is in its initial position, the lateral disturbance force then has the lowest influence on the vehicle motion. The effect of the force is greatest when the middle axle is at its forward-most position. The pulsed force response differs from the stepped force response in that the vehicle’s yaw rate tends toward zero over time, and the vehicle’s travel direction remains in a straight line. For the stepped response, the yaw angular velocity only converges to zero when the middle axle is in its initial position. The vehicle’s yaw angular velocity tends toward stability when the middle axle is at a different position, and the vehicle then travels along a curved path.
Therefore, when the vehicle is subjected to the lateral pulsed force, the wheelbase change strategy can be derived as follows: the middle axle should be kept at its initial position when the vehicle is subjected to a lateral disturbance to minimize the effect of this disturbance on the vehicle’s motion.
Vehicle motion under lateral wind
If the vehicle is subjected to the force of a lateral wind during high-speed driving, the vehicle will then produce a lateral motion. If the vehicle is traveling in a straight line at a speed V and is then subjected to a lateral wind of speed w, the lateral force Yw and the yaw moment Nw acting on the vehicle are then expressed as follows:


where Cy is the lateral force coefficient, Cn is the yaw moment coefficient (with the positive value of Cn being defined in the anticlockwise direction),

When the vehicle is subjected to a constant crosswind, the lateral force Yw generated by this crosswind is assumed to be a stepped force and acts on the AC of the vehicle. The vehicle’s motion is then expressed in the vehicle coordinate system as:


Similarly, the steady-state values of


where

As shown by the analysis of the handling stability, if the vehicle travel speed is less than the critical speed, then

Sw is thus called the crosswind sensitivity coefficient and is used as an indicator of the vehicle’s sensitivity to crosswind disturbances.
The same numerical calculation model was then used to vary the force and the torque input, given by lw = −0.4. As shown in Figure 13, the vehicle’s motion response under the action of a lateral constant wind is calculated. Figure 13(a) shows the trajectory of the CG. It can be seen from this figure that the crosswind sensitivity is at its lowest and the lateral position offset is at its smallest when the middle axle is in its hindmost position. However, the vehicle deviation is most pronounced when the middle axle is in its forward-most position. Figure 13(b) shows that the yaw rate will eventually maintain a nonzero steady-state value under the influence of a constant crosswind, regardless of the positioning of the middle axle, and the vehicle will then travel along a curved path. As the middle axle position moves further rearward, the steady-state value of the yaw rate decreases, the lateral displacement of the vehicle per unit time also decreases, and the radius of the curved path increases.
Vehicle responses under the action of steady and gusting lateral winds: (a) position of CG under steady wind; (b) vehicle yaw rate under steady wind; (c) position of CG under gusting wind; (d) vehicle yaw rate under gusting wind.
Next, we consider the case where the vehicle is subjected to a short lateral gust and the steering angle of the vehicle is 0°. If the gust duration is sufficiently small, the gust can be considered to be a pulsed input. The absolute coordinate system fixed to the ground is then used to describe the vehicle motion.


The steady-state values of the vehicle’s lateral position and heading angle can then be obtained by performing a Laplace transform, as follows:

However, if


When the vehicle speed is lower than the critical speed, the steady-state motion of the vehicle can be summarized as follows. If lN>lw,
Therefore, the wheelbase adjustment strategy for the action of lateral winds can be obtained as follows. When the vehicle is driving on a windy road, the middle axle should be adjusted to be at its rearmost position to reduce the vehicle’s sensitivity to the lateral wind and to enhance the driving stability and the ground tracking capability.
Simulation
Simulation of handling stability
To verify the theoretical calculation results, a three-dimensional model of the proposed vehicle was imported into the ADAMS simulation program. The road spectrum function was used to simulate a smooth road surface and a tyre model with constant vertical stiffness and cornering stiffness was built. The front and rear steering wheels were both assigned an angle of 8° at 3 s, and the vehicle travel speed was maintained at 50 km/h during the simulation. Three different middle axle positions were simulated: moved forward by 0.5 m, moved backward by 0.5 m, and the initial position.
The trajectories of the vehicle in these three cases are shown in Figure 14, which shows that the vehicle tends to have a larger steering radius when the middle axle is moved backward. It can also be observed from the motion trajectory shown in Figure 14 that the vehicle tends to understeer when the middle axle is moved backward, while the vehicle tends to oversteer when the middle axle is moved forward. Therefore, yaw control can be realized by varying the position of the middle axle.

Steering tracks produced by three simulations of the middle axle position.
When compared with the middle axle at the front end or rear end positions, the middle axle at the initial position is in a transitional state. To simplify the comparison of the simulation results, only the simulation results for the middle axle at the front end and the middle axle at the rear end are selected. The difference in the CG positions between the cases of forward and backward movement of the middle axle is shown in Figure 15(a), which shows that the steering radius of the vehicle is different in the two cases and indicates that the steering radius differs by approximately 5 m between the two cases. The vehicle will have a greater turning radius if the middle axle is moved backward. Figure 15(b) shows the yaw rate response of the vehicle. The yaw rate increases rapidly to a peak value of 45°/s after the angle signal is input at 3 s, and a steady state is reached at 4.6 s. The yaw rates of the two simulations have the same variance trend, the same peak value, and the same response time. The main difference is that the vehicle has a different yaw rate in the steady state. The steady-state yaw rate after the middle axle is moved forward is greater than the steady-state yaw rate when the axle is moved backward. Figure 15(c) shows the lateral acceleration during the vehicle’s operation. The vehicle is traveling in a straight line during the first 3 s and thus the lateral acceleration in these first 3 s is zero. The vehicle with the middle axle in the forward position shows a larger lateral acceleration. As shown in Figure 15(d), the side-slip angle of the rear axle wheel is greater when the middle axle is moved forward, which increases the vehicle oversteering tendency and reduces the steering radius.

Simulation results for the steering: (a) position of CG; (b) yaw rate; (c) lateral acceleration; (d) side-slip angle of rear axle wheel.
The results of the above analysis can now be applied to an actual scenario in which the vehicle adjusts the wheelbase actively to change the steering characteristics of the vehicle according to different driving demands. For example, the middle axle can move backward to increase the understeer and improve the vehicle’s steering stability when the vehicle is traveling at high speed. Conversely, the middle axle can move forward to increase oversteer and improve the vehicle’s steering sensitivity when the vehicle is traveling at low speed. Therefore, the vehicle can use the variable-wheelbase function to balance the steering sensitivity and stability, which thus improves the dynamic performance of the vehicle.
The steady-state steering direction angle error and the lateral position error were measured by simulating the forward-most and rearmost positions of the middle axle. The results are presented in Figure 16, which shows that the direction angle error increases when the middle axle moves forward, but decreases when the middle axle moves backward. This change in the direction angle error is consistent with the numerical calculation results. Figure 16(b) shows the lateral position error. As shown in the figure, this error is greater when the middle axle moves backward rather than when it moves forward. Therefore, as the vehicle travels, if a more precise directional angle is required, the middle axle should then be moved backward. If a more precise lateral position is required, then the middle axle should be moved forward.

Errors during steady-state operation: (a) steering angle; (b) lateral position.
Simulation of lateral disturbance resistance
In the ADAMS simulation model, different lateral disturbance forces were applied to the moving vehicle and the vehicle motion responses obtained are presented in Figure 17, which shows that the influence on the vehicle motion is minimized for both the lateral stepped and pulsed disturbing forces when the middle axle is located at its initial position. The vehicle travel path is most strongly affected when the middle axle is moved forward, which concurs with the results of the numerical calculations in the previous section. Figure 17(c) and (d) show the motion responses of the vehicle under the action of a lateral constant wind and lateral gusting, respectively. As shown in the figure, the steady-state value of the yaw rate generated by these winds is at its smallest when the middle axle is in the rear position. When the middle axle is in the front position, the yaw vehicle rate reaches its highest value. For the lateral gust, the instantaneous yaw rate generated by the wind is lowest when the middle axle is in the rear position, and is highest when the middle axle is in the front position, which agrees with the numerical calculation results.

Responses to: (a) lateral step force; (b) lateral pulse force; (c) lateral constant wind; (d) lateral gust.
Conclusion
The function of a yaw control system is to correct vehicle handling when a vehicle is in danger of instability. However, various problems exist with these systems, such as response lags and control errors. Unlike conventional yaw control systems, the variable-wheelbase chassis proposed in this paper varies the vehicle’s structural parameters according to the requirements of the driving conditions. This can improve the vehicle’s lateral dynamic performance and enhance the vehicle’s adaptability. When the vehicle is traveling at low speed, the distance between the front axle and the middle axle is reduced to enhance the vehicle’s steering sensitivity and reduce its lateral position control error. When the vehicle is driven at high speed, increasing the distance between the front axle and the middle axle tends to make the vehicle understeer and thus enhances the vehicle’s steering stability. The middle axle position can be adjusted based on the lateral force applied to enhance the anti-disturbance ability of the vehicle and ensure vehicle driving safety in complex and variable environments.
The influence of the middle axle position on the vehicle’s lateral dynamic performance includes the following main aspects:
Changing the wheelbase affects the vehicle’s steering characteristics. In the proposed variable-wheelbase vehicle, when the middle axle moves backward, the distance between the front axle and the middle axle increases; the vehicle then tends to understeer, the steering stability is gradually enhanced, and the vehicle’s steering sensitivity decreases. Conversely, increasing the wheelbase between the front axle and the middle axle causes the vehicle to oversteer and the vehicle’s steering stability is then reduced, although the steering sensitivity is improved.
The wheelbase variability affects the steady-state steering error, which includes both the direction angle error and the lateral position error. When the middle axle moves forward, the vehicle direction angle error increases and the lateral position error decreases. When the middle axle moves backward, the direction angle error then decreases but the lateral position error increases.
The lateral anti-disturbance resistance is also affected by the wheelbase. When faced with the effects of different lateral disturbances during driving, the wheelbase can be adjusted to enhance the anti-disturbance capability of the vehicle. When the lateral pulsed force and the lateral stepped force act on the CG, moving the middle axle backward can weaken the effect of the lateral disturbance force. To counteract the effect of lateral wind, the crosswind sensitivity coefficient can be reduced and the anti-crosswind resistance of the vehicle can be enhanced by adjusting the wheelbase based on the position of the AC.
Additionally, the proposed wheelbase adjustment scheme can be applied to ordinary vehicles. For a conventional four-wheeled vehicle, a pair of driven wheels that can move longitudinally along the frame can be added. For multi-axle vehicles, addition of a movement function to the middle axle can also achieve the same effect.
Footnotes
Acknowledgements
The authors sincerely thank Professor Xiao-Jun Xu of the National University of Defense Technology for his idea and for reading the manuscript during its preparation.
Handling Editor: James Baldwin
Author contributions
The author contributions are as follows: Xiao-Jun Xu was in charge of the numerical calculations; Hai-Jun Xu was in charge of the structural design; Wen-Hao Wang wrote the manuscript and built both the dynamic model and the numerical model; Fa-Liang Zhou assisted with the simulations in ADAMS.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Supported by the National Natural Science Foundation of China (Grant Nos. 51475464, 51575519, 51675524 and 51705524).
Availability of data and materials
The datasets supporting the conclusions of this article are included within the article.