
Abstract
Nowadays, fault detection, identification, and classification seem to be the most difficult challenge for gear systems. It is a complex procedure because the defects affecting gears have the same frequency signature. Thus, the variation in load and speed of the rotating machine will, inevitably, lead to erroneous detection results. Moreover, it is important to discern the nature of the anomaly because each gear defect has several consequences on the mechanism’s performance. In this article, a new intelligent fault diagnosis approach consisting of Autogram combined with radial basis function neural network is proposed. Autogram is a new sophisticated enhancement of the conventional Kurtogram, while radial basis function is used for classification purposes of the gear state. According to this approach, the data signal is decomposed by maximal overlap discrete wavelet packet transform into frequency bands and central frequencies called nodes. Thereafter, the unbiased autocorrelation of the squared envelope for each node is computed in order to calculate the kurtosis for each one at every decomposition level. Finally, the feature matrix obtained from the previous step will be the input of the radial basis function neural network to provide a new automatic gear fault diagnosis technique. Experimental results from the gearbox with healthy state and five different types of gear defects under variable speeds and loads indicate that the proposed method can successfully detect, identify, and classify the gear faults in all cases.
Keywords
Introduction
Gears are often the heart of a wide range of rotating machines. They have a vital role in transmitting power and motion from one shaft to another. However, due to the high load and difficult working conditions, gears are exposed to failures and defects. A sudden gear malfunction may decrease the performance of the entire industrial mechanism and may even lead to fatal breakdown. Therefore, it is imperative to monitor their health state. Gear fault diagnosis using vibration signals has been the subject of intensive studies for decades in order to detect the early degradation of this mechanical part. Vibration signals provide rich information about the gearbox’s conditions. Various methods have been developed and summarized for the diagnosis of rotating machine faults using vibration analysis, such as spectral kurtosis (SK).
SK was first introduced by Dwyer1,2 as a complement to conventional power spectral density to identify and characterize the transients in a data signal. The basic idea of this technique is to find the sequence of impulses in a signal using a kurtosis indicator.1,2 SK is very sensitive to non-stationary patterns and can successfully locate the appropriate demodulation frequency band in which the signal has maximum impulsivity. Antoni1,3 proposed two techniques to compute the SK, one based on the short-time Fourier transform (STFT), 3 while the other is based on filter banks. 3 The STFT-based SK locates the center frequency and window length that has the highest SK value. 4 Kurtogram is a colored two-dimensional (2D) map which displays the SK values for each center frequency and window length. Antoni 3 suggested a further improvement of the Kurtogram under the name Fast Kurtogram (FK). FK uses multirate filter banks to avoid the extensive calculation of the full Kurtogram. 3 Then, an improved Kurtogram has also been proposed by Lei et al. 5 in which wavelet packet transform (WPT) is used to exploit its good ability to detect the defect patterns in a noisy signal. However, industrial devices are technically complex systems composed of various components such as gearboxes, bearings, and shafts operating simultaneously.4,6 As a result, gear defect signatures are often covered and submerged by high non-Gaussian noise, such as large random impulses or a very low noise ratio, making the defective frequencies non-dominant in the spectrum compared to the discrete components. This issue will undoubtedly decrease the reliability of the FK.4,6
A modern approach, known as Autogram,4,6 can manage this case by developing the conventional Kurtogram. Autogram is based on unbiased autocorrelation (AC) to remove unrelated signal components such as noise and random impulses.4,6 Autogram removes the impulsive noises in the vibration signal and improves the periodic components which are related to the fault signature.4,6 Autogram decomposes the data signal using maximal overlap discrete wavelet packet transform (MODWPT) into several frequency bands and central frequencies called nodes.4,6 Subsequently, the unbiased AC is calculated for the squared envelope for each node.4,6 Thereafter, Autogram calculates the kurtosis value for each squared envelope. The kurtosis values are displayed in a color map, where the color scale is proportional to the kurtosis value, while the decomposition level and MODWPT frequency are presented in the vertical and horizontal axes, respectively. 4 Finally, Autogram selects the squared envelope with the highest kurtosis value to be applied to Fourier transform to extract the defect feature.4,6
However, Autogram has the ability to perceive the apparition of gear failure, but without giving any information about its nature. Gear defects have the same frequency signature, making the classification of gear defects the most difficult part. In addition, the variation in the load and speed of the rotating machine will obviously induce improper detection results. Consequently, the use of advanced signal processing techniques for fault diagnosis requires great expertise to make automatic decisions about the health state of the machines in operation.
Currently, intelligent classification techniques are outstanding methods such as artificial neural networks (ANNs),7–15 fuzzy logic systems,16–17 neuro-fuzzy,18–22 parsimonious network based on fuzzy inference system (PANFIS), 23 and support vector machine (SVM).24–29 Simulated by human thinking, ANN is an automatic tool for the detection and identification of different kinds of faults without in-depth knowledge of the system. Therefore, the combination of Autogram and ANN seems to be a new intelligent fault diagnosis approach that could detect, identify, and classify different types of gear faults. In this article, a new fault diagnosis technique for gearbox systems involves the modern Autogram method combined with the radial basis function neural network (RBFNN). Radial basis function (RBF) has a unique network architecture that offers significant advantages over other types of neural networks, such as improved approximation capabilities, simpler network structures, and faster learning algorithms.30–33
The aim of this article is to offer a new intelligent automatic gear fault diagnosis technique, which can detect and distinguish between different types of defects under several loads and different speeds. Through experimental results, it is clear that our proposed approach can detect and classify the gear fault signatures even under variable conditions.
Mathematical background
Autocorrelation (AC)
AC is a mathematical tool for time series analysis. AC compares a signal with a delayed version of itself to detect and improve the periodic impulses which are directly related to the gear failure. 6
For a continuous signal x, the AC of the squared envelope is calculated as

with the delay factor
Maximal overlap discrete wavelet packet transform (MODWPT)
MODWPT is in an extension of the common discrete wavelet transform (DWT), and it is also considered as a developed version of the maximal overlap discrete wavelet transform (MODWT).
34
Like the Mallat algorithm, MODWPT uses quadrature mirror filters.34,35 Let us assume that

Unlike the Mallat algorithm which adopts a 2-base decimation operation, MODWPT introduces interpolation. More precisely, for a level j of MODWPT, 2j – 1 – 1 zeros are included in between two adjacent coefficients of
For a discrete time sequence {x(t), t = 0, 1, …, N – 1}, the wavelet coefficients {Wj,n,t} of the nth sub-band for level j can be calculated as34,35
where n = 0, 1, …, 2j – 1, W0,0,t = x(t)

Autogram
As presented in Moshrefzadeh and Fasana, 4 we can summarize Autogram in four main points:
MODWPT filters out and decomposes the vibration signal into frequency bands and center frequencies (nodes).
Then, Autogram computes the AC for each squared envelope of each node. In contrast to FK, this technique removes the impulsive noise to avoid any inefficient high kurtosis values.
In this step, kurtosis indicator is measured for the signals produced in the previous step. This requires the determination of an appropriate frequency band for the demodulation signal.
To measure the impulsivity of AC current for each node obtained above, three modified equations of the conventional kurtosis are defined as follows


The “+” and “–” operators indicate that only positive and negative values are accepted, while the other values are converted to zero;

Similar to FK, the kurtosis values for every node are displayed in a color map, where the color scale is proportional to the kurtosis value, while the decomposition level and MODWPT frequency are presented in the vertical and horizontal axes, respectively.
4. The Fourier transform is applied now on the squared envelope with the highest kurtosis value to extract the fault feature.
Radial basis function neural network (RBFNN)
ANN has been used as an automatic monitoring device to detect, classify, and identify various kinds of gear faults. RBFNN has been considered as one of the most used neural network architectures for its non-linear mapping capability and training efficiency in addition to a simple structure. RBF uses Gaussian functions as the activation functions with a feed-forward structure consisting of three layers: input, hidden, and output layers as shown in Figure 1.

Artificial neural network structure.
In Figure 1,
The Gaussian activation functions in the hidden layer will respond to the input and generate the output neurons, thus improving the performance of the network and reducing the training time. Equation (9) expresses the response of the

where

where
The orthogonal least-squares (OLS) learning procedure determines the RBF centers because their values generate the performance of an RBFNN which can be realized by considering the output of the

where
The advantage of the RBF compared to the back-propagation network is the use of a Gaussian activation function. Therefore, only a few neurons have a non-zero response and only the weights of those active neurons are modified, thus reducing the training time. 31
Experimental description
A speed reducer with a gear ratio equal to 25/56 is considered as a test bench (Figure 2). The motion between the two shafts is produced by an electric direct current (DC) motor with a nominal speed of 3600 r/min. The output shaft is connected to a magnetic power brake to generate different resistive torques.36,37

(a) Gearbox from the test rig and (b) schematic of the laboratory gearbox test rig.
In order to examine the efficiency of the above proposed method, six pinions with different defects were considered during the experience. The first one is faultless and is referred to as good (G), while the others have different types of faults, namely, tooth root crack (TRC), chipped tooth in length (CTL), chipped tooth in width (CTW), missing tooth (MT), and general surface wear (GSW), as shown in Figure 3.36,37
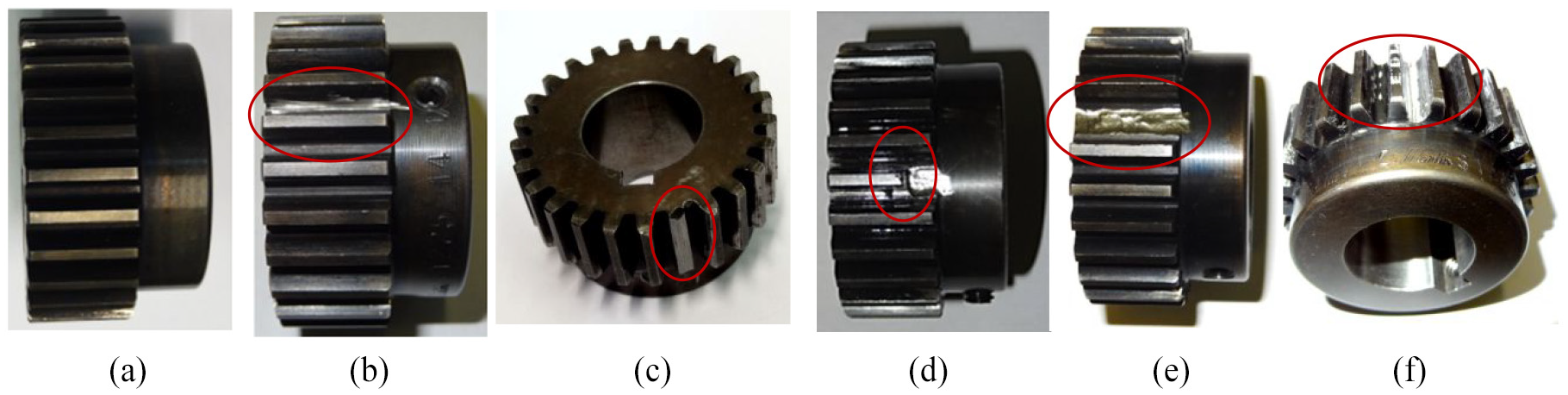
Six pinion states: (a) good, (b) tooth root crack, (c) chipped tooth in length, (d) chipped tooth in width, (e) missing tooth, and (f) general surface wear.
Three pinions are installed, simultaneously, on the input shaft of the gearbox. With a simple axial movement by the wheel of the output shaft, the engagement of each of them is achieved (Figure 4). Two accelerometers (sensitivity: 100 mV/g) used to record vibration signals were mounted radially, one vertically and the other horizontally, on the bearing case of the output shaft. The accelerometer channel’s time sampling frequency is 125 kHz, the cut-off frequency of the anti-aliasing filter is 27 kHz, and the acquisition duration is 30 s.36,37

Location of pinions of the single-stage gear in the gearbox.
The accelerometer signals have been collected for several working conditions under different loads and rotation speeds for each of the six gears used (see Table 1).
Working conditions.

Results and discussion
Experimental signals are collected from a speed reducer with a gear ratio of 25:56. Two accelerometers were used to measure the vibration signals generated by the pinions. Different vibration data sets were measured when the spur gear train was working with good (G), tooth root crack (TRC), chipped tooth in length (CTL), chipped tooth in width (CTW), missing tooth (MT), and general surface wear (GSW) working conditions.
Figure 5 shows the acceleration vibration signals recorded under 1200 r/min operating speed and 11 N m load. From Figure 5, we can clearly see that the different defects do not significantly affect the vibration signal. We notice that there is not a significant increase in the energy of the time signal.
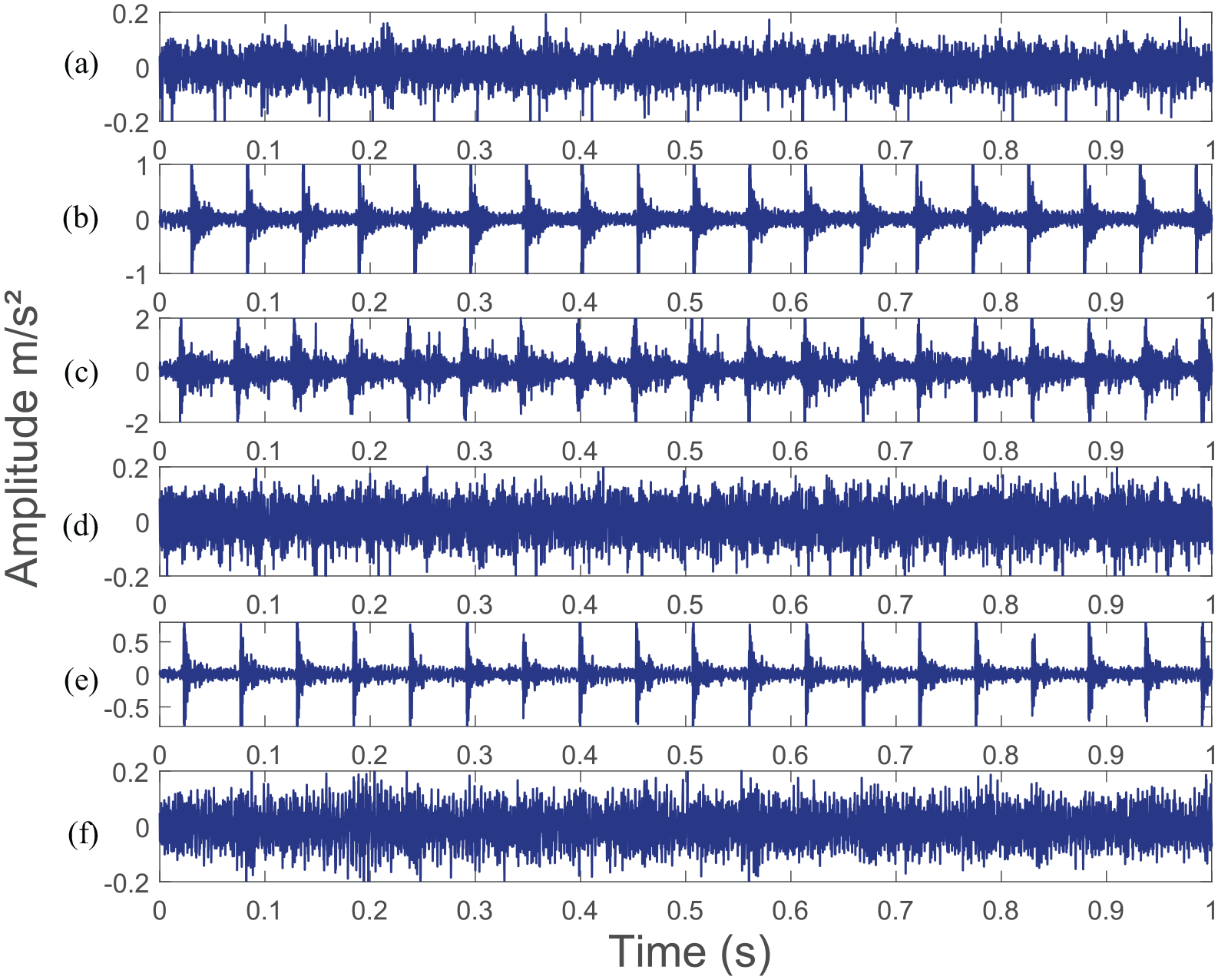
Pinion vibration signals of the gearbox with different faults (speed: 1200 r/min and load: 11 N m): (a) G, (b) MT, (c) GSW, (d) CTW, (e) CTL, and (f) TRC.
Gear fault diagnosis using Autogram
Vibration signals generated by a defective gear have two important characteristics: a high frequency and a very low energy in comparison to the total energy of the signal, so it is difficult to locate the gear malfunction by a conventional and simple signal processing technique.
Autogram seems to be a powerful tool for the gear fault diagnosis. Afia et al. 6 have used Autogram to discover a chipped tooth at an earlier stage in a gearbox system. In this section, the Autogram is applied to the above-mentioned operating mode (1200 r/min, 11 N m) to detect the five different gear failures. Figure 6 displays the Autogram maps and the corresponding envelope spectrums for the five different gear states.
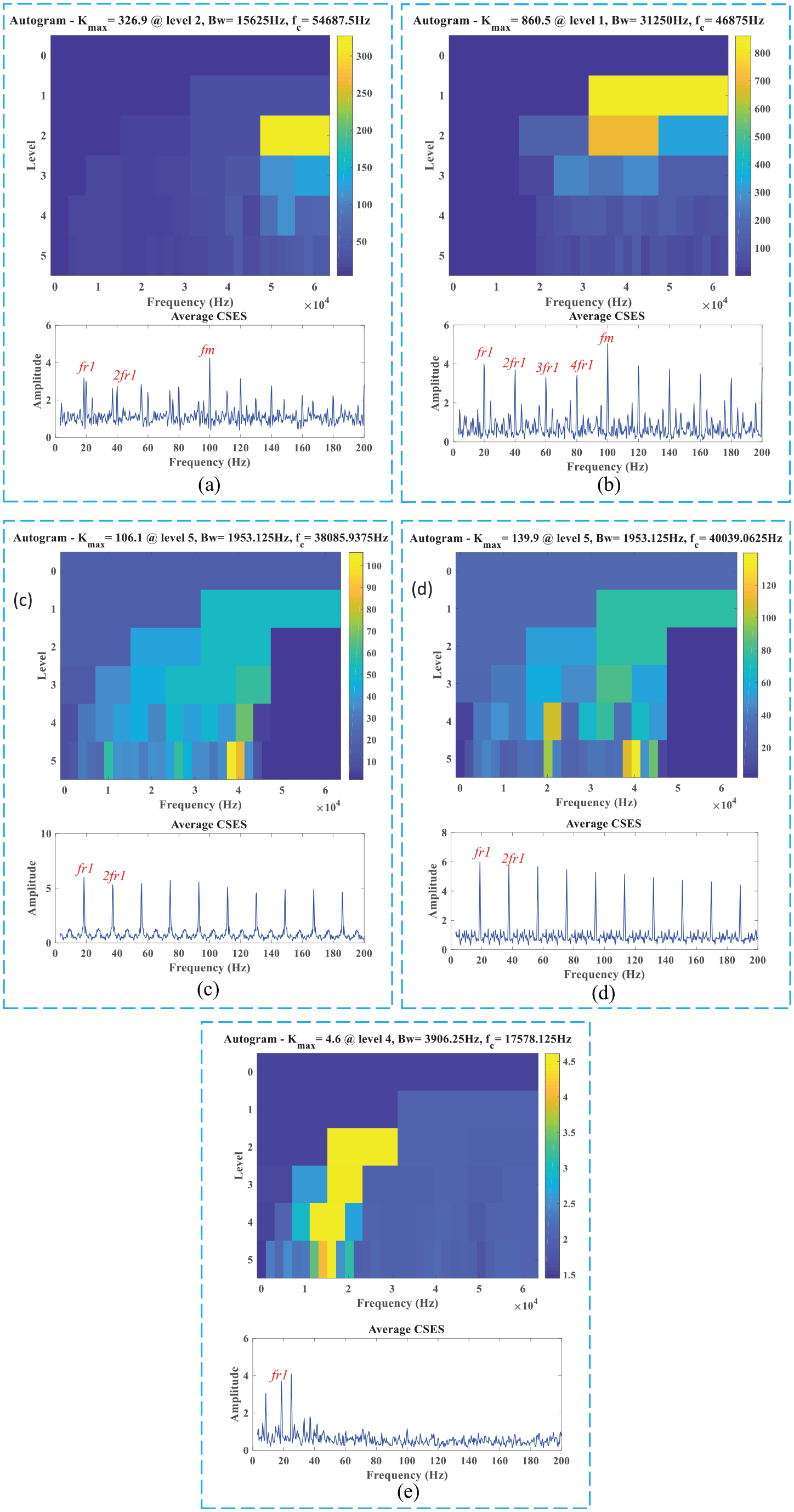
Autogram and the squared envelope spectrum of the vibration signals at 1200 r/min speed with a load of 11 N m for various gear states: (a) GSW, (b) CTW, (c) CTL, (d) MT, and (e) TRC.
From Figure 6, we can see that the squared envelope spectrum for every gear state indicates a typical modulation at 20 Hz. This modulation actually corresponds to the input shaft rotation speed, that is, fr1 = 20 Hz. These characteristic instantaneous frequency curves are in fact a sign of the presence of a gear failure. Unfortunately, it appears from Figure 6(a)–(e) that the gearbox faults have the same fault indicator and that Autogram can only detect them. Autogram can detect the appearance of gear defects, but without providing any information about its type. Thus, an advanced signal processing technique for fault diagnosis requires a high level of expertise to make automatic decisions on the machine health condition.
In the next section, we will provide a combination of Autogram and the RBFNN to develop a new gear fault classification technique to detect, identify, and classify the six gear states with even 16 operating modes. But we will first give a more detailed explanation of our suggested approach.
State classification based on Autogram and RBFNN
The proposed method includes two main processes: feature extraction and feature classification. We believe that the combination of Autogram and RBFNN will take a huge step in feature extraction and classification and it can be used to develop a new robust automatic gear fault diagnosis method. In the feature extraction step, Autogram first decomposes the complicated signal using MODWPT into frequency bands and central frequencies called nodes. MODWPT provides a uniform frequency bandwidth, overcomes the time-variant transformation, and also allows the reconstruction of the original signal without losing any information. Thereafter, the unbiased AC is computed for each node obtained previously. AC improves repeated patterns in a signal which are significantly related to the gear fault and removes the uncorrelated components of the signal, that is, noise and random impulsive contents. Finally, the kurtosis indicator is calculated for each AC to locate the peakedness provided by the periodic impulses. Therefore, the feature vectors, obtained from the previous steps, are absolutely related directly to gear failure. These vectors are the inputs of the RBFNN to identify and classify several gear faults (Figure 7).

Block diagram for (a) the training of the neural network and (b) fault identification.
The proposed method uses the Autogram to obtain the feature matrix for each gear state for 16 operating modes. First, each vibration signal is divided into 20 data sets. Then, we apply the Autogram to each data set with a decomposition level of 6. This gives in total 16 matrices (7 × 20) for each gear state at every working condition including the variation in load and speed (320 colon vectors). Subsequently, for feature classification, RBFNN provides a powerful automatic tool for the identification and classification of gear faults using the features extracted above. Figure 8 presents a better illustration of the proposed framework.

Flowchart of the fault identification method.
To illustrate the reason for considering the Autogram as an effective feature extraction method, Figure 9 shows the kurtosis indicator trajectory obtained by the Autogram for the five gear defects (missing tooth (MT), chipped tooth in length (CTL), chipped tooth in width (CTW), tooth root crack (TRC), and general surface wear (GSW)) under five different operating modes (900 r/min and 0 N m, 900 r/min and 8 N m, 900 r/min and 11 N m, 1200 r/min and 11 N m, and 1500 r/min and 8 N m).

Kurtosis trajectory for the first 10 nodes obtained by Autogram for the five different gear defects under (a) 0 N m load, 900 r/min speed; (b) 8 N m load, 900 r/min speed; (c) 11 N m load, 900 r/min speed; (d) 11 N m load, 1200 r/min speed; and (e) 8 N m load, 1500 r/min speed.
From Figure 9, it appears that there is almost no overlapping between the five gear defects for all five working modes. The experimental results confirm that our suggested feature extraction method can successfully distinguish and classify several types of gear defects.
Now, the fault feature vectors (320 colon vectors for each gear state) obtained by Autogram are used to identify and classify the gear states using the RBFNN. The data sets are divided into training data sets (70% of data sets) and test data sets (30% of data sets) to test the effectiveness for all gear states (good (G), missing tooth (MT), chipped tooth in length (CTL), chipped tooth in width (CTW), tooth root crack (TRC), and general surface wear (GSW)).
The RBFNN, used in this work, contains three layers: input, hidden, and output. The nodes of the input layer represent the feature extracted vectors, while the number of output nodes is varied between 1 and 6 representing each gear state.
In order to evaluate the robustness of the proposed approach, another classification technique, namely, multilayer perceptron (MLP) neural network, is applied. The comparison results are presented in Figure 10(a) and (b) for the RBF and MLP, respectively. Figure 10(a) and (b) shows the performance of the two neural network techniques. The RBF shows an excellent performance of 1.032258e–29 with 1900 iterations (epochs), while the MLP displays a terrible performance of 0.0741 with the same number of epochs. As shown, RBF has an advantage over the MLP in terms of classification accuracy. The results shown in Figure 10 illustrate the feasibility and efficiency of our suggested algorithm.

Neural network performance of (a) radial basis function and (b) multilayer perceptron.
Tables 2–7 partly show the classification results of all the cases mentioned above, from which we can notice that in a noisy environment and even under different working conditions, especially the non-load case, the actual outputs of the RBFNN meet the target outputs showing 100% success rate for each gear state under 16 different working conditions. This confirms the effectiveness of the new technique and made it possible to classify and identify gear defects even under varying operating conditions.
Classification results based on RBF neural network for the healthy state.

RBF: radial basis function.
Classification results based on RBF neural network for the gear with a missing tooth.

RBF: radial basis function.
Classification results based on RBF neural network for the gear with a chipped tooth in length.

RBF: radial basis function.
Classification results based on RBF neural network for the gear with a chipped tooth in width.

RBF: radial basis function.
Classification results based on RBF neural network for the gear with a tooth root crack.
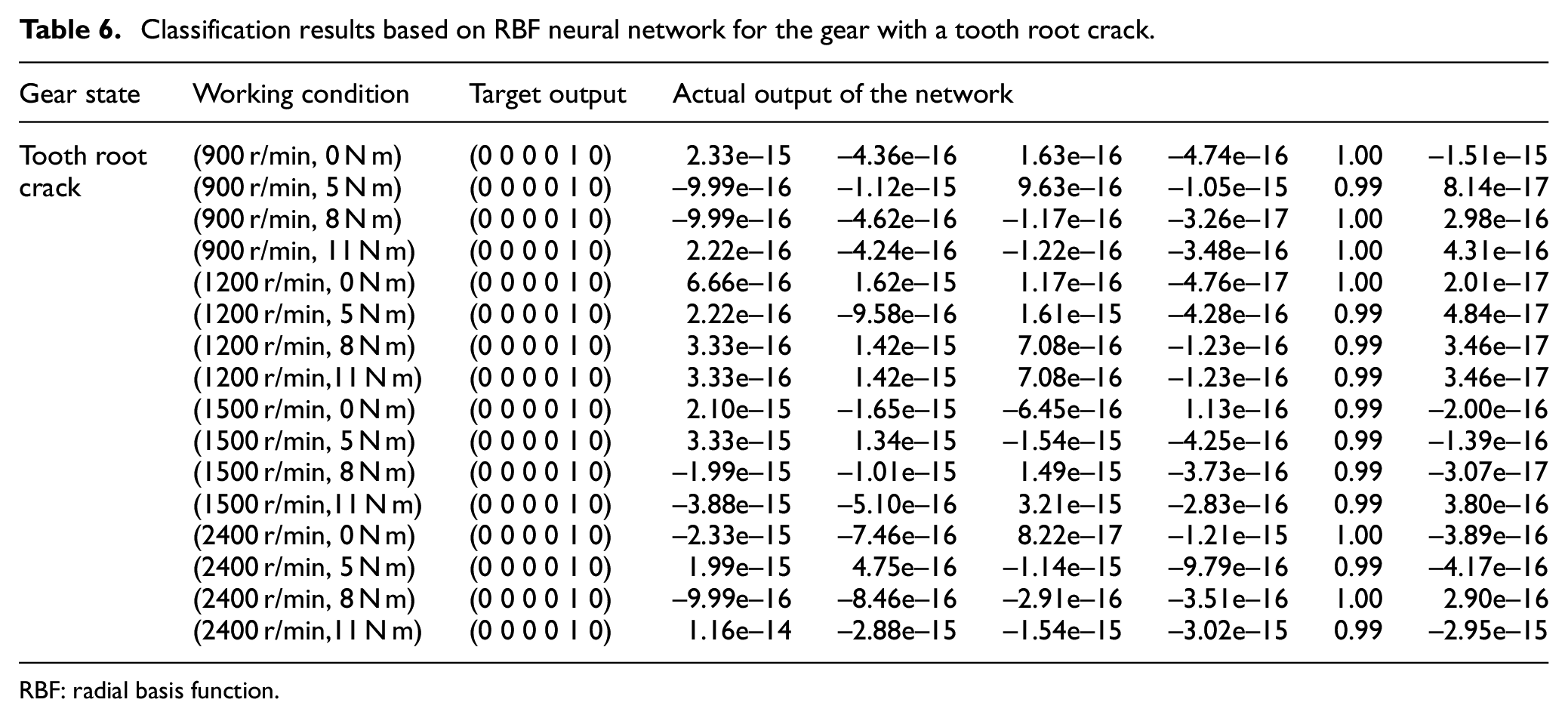
RBF: radial basis function.
Classification results based on RBF neural network for the gear with a general surface wear.

RBF: radial basis function.
Conclusion
Rotary machines are considered complex industrial systems that consist of several devices such as gears, bearings, and shafts operating simultaneously. Therefore, extracting the gear defect signature using vibration signals requires a robust automatic signal processing technique for online inspection, a superb approach that could detect, classify, and identify different types of gear defects. In this article, a new method named Autogram is proposed in order to locate the appropriate demodulation frequency band for gear fault diagnosis. In contrast with Kurtogram, this new method locates an optimal frequency band which allows better feature extraction. First, the data signal is decomposed into different frequency bands and center frequencies (nodes) by MODWPT. Subsequently, the unbiased AC of the squared envelope is computed for each node to decrease the uncorrelated random noise. Autogram reduces the influence of non-periodic impulses and noise which cover the gear fault from raw time data. Autogram has the ability to detect the occurrence of defects, but without giving any information about its nature. Therefore, a continuous monitoring technique is required to detect, identify, and classify different types of defects and this can be achieved through the use of an RBFNN combined with Autogram developing in this way a new automatic fault diagnosis technique.
Experimental data sets with faultless gearbox and various kinds of faults are used to test the accuracy of the suggested approach even under various operating modes. The experimental results confirm that Autogram in conjunction with RBFNN is a reliable technique which shows a great accuracy concerning the gearbox failure classification even under different operating conditions.
Some future research will be conducted in order to improve the gear diagnosis domain to detect and locate multiple gear defects simultaneously. The complexity of industrial rotating machinery, such as turbines, centrifugal pumps, pistons, compressors, and diesel engines, also requires the use of various sensors, for example, a combination of an accelerometer and an acoustic microphone, to obtain more accurate information for machine condition monitoring.
Footnotes
Acknowledgements
The authors would like to thank the Solid Mechanics and Systems Laboratory (LMSS), University M’Hamed Bougara of Boumerdes, Faculty of Technology, Boumerdes, and the General Directorate for Scientific Research and Technological Development (DGRSDT), Algeria.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.