
Abstract
Performance evaluation is a necessary stage in development of tracking control strategy of autonomous vehicle system, which determines the scope of application and promotes further improvement. At present, most of the tracking control strategies include performance evaluation. However, performance evaluation criteria differ from work to work, lacking comprehensive evaluation system. This article proposes a multidimensional integrated tracking control evaluation system based on subjective and objective weighting, taking into account the tracking accuracy, driving stability, and ride comfort. Through the co-simulation of CarSim and Simulink, qualitative analysis and quantitative analysis based on multidimensional evaluation system of five coupled longitudinal and lateral control strategies (lateral: pure pursuit feedforward control, dynamic-model-based optimal curvature control (dynamic feedforward control), Stanley feedback control, kinematics feedback control, and dynamic feedback control; longitudinal: the incremental proportion–integration–differentiation control) under typical operating conditions are carried out to analyze the operating range and robustness of each tracking control strategy. The results show that the Stanley tracking control strategy and the dynamic feedback tracking control strategy have a wide range of applications and robustness. The consistency of qualitative analysis results and the quantitative analysis results verify the validity and feasibility of the evaluation system.
Keywords
Introduction
As one of the core parts of autonomous vehicle system, tracking control plays an important role in ensuring the safety of drivers and vehicles. The main purpose of tracking control is to ensure the vehicle follows an expected trajectory with an expected speed. Many scholars have studied tracking control strategies. The research can be categorized in terms of the vehicle model selected, the control theory used, and the control content. The vehicle model can be divided into three types: geometric, kinematic, and dynamic. The control methods can be divided into classical, modern, and intelligent. The control content can be divided into three types: lateral tracking control, longitudinal tracking control, and coupled longitudinal and lateral tracking control.
The purpose of the lateral tracking control is to enable the vehicle to travel smoothly along the planned path by adjusting the steering wheel. Research in this area includes studies of feedback tracking control and feedforward tracking control. The feedback tracking control compensates for the deviation between the driving state of the vehicle and the reference, calculating the corresponding steering wheel angle. The proportion–integration–differentiation (PID) control strategy1,2 and Stanley control strategy 3 are typical lateral tracking control strategies. The feedforward tracking control imitates the driver’s preview behavior and adjusts the steering wheel according to the difference between the current position and the expected position of the vehicle at a certain moment in the future. The main representatives are pure pursuit control,4,5 optimal curvature control, the fuzzy control, 6 and the predictive control.7,8
The purpose of longitudinal tracking control is to track a desired speed or maintain a desired distance by regulating the throttle and braking. It is mainly divided into direct control and hierarchical control. The idea of the direct control method is to generate the desired throttle opening or brake pressure directly from the desired speed or distance. 9 The hierarchical control method divides the intelligent vehicle longitudinal control system into two layers: the upper controller and the lower controller. The upper controller generates the desired vehicle speed or the desired acceleration, and the lower controller receives the desired state value generated by the upper controller and generates the desired brake pressure value and the desired throttle opening value through control algorithm, thereby realizing the function of vehicle longitudinal distance control or speed tracking control. 10 Some researchers proposed a simplified traffic smoothing model for guiding movements of connected automated vehicles, which improve the effect of longitudinal tracking control (trajectory optimization is an important way to improve longitudinal tracking accuracy. The connected automated vehicles are also an important development direction for unmanned vehicles). 11
A vehicle is a complex nonlinear coupling system. Simply considering the lateral or the longitudinal control in the tracking control process will only lead to large control errors, affecting the track accuracy and the safety of the vehicle. The coupled longitudinal and lateral controller can compensate for the above-mentioned shortcomings to some extent. The coupled longitudinal and lateral tracking control strategy is the main orientation of development in the future of tracking control area. The main purpose is to enable the vehicle to travel on the desired path with the desired speed. The compensation effect of integrated coupling in the tracking control process of the self-driving vehicle helps improve the control precision of the vehicle tracking and thus the tracking performance of the system.
However, in addition to targeted selection of control methods, the design of the coupled longitudinal and lateral tracking control strategy should also include the evaluation of the control methods. The evaluation can verify the effectiveness of the designed strategy, and also guide its optimization. At present, there are two mainstream evaluation methods, qualitative and quantitative. Among them, the observation method is the main qualitative method, 12 in which the tracking control effect is initially judged by observation of the desired and actual trajectories. Quantitative evaluation is based on the performance of the control method in various aspects. A series of evaluation indicators is constructed to quantitatively evaluate the tracking results. Park et al.13–17 chose trajectory deviation as main index to evaluate path tracking performance. Elbanhawi et al. 18 took steering load into account. Guo et al. 19 proposed anthropomorphism degrees involving lateral acceleration and steering wheel angle to investigate the humanoid level and ride comfort of different path tracking methods. Pratama et al.20–22 focused on analyzing the stability of tracking control strategies. However, the tracking control of a vehicle is the core of the automatic driving technology and the final embodiment of the vehicle’s running. With a single qualitative and quantitative evaluation index, it would be difficult to fully describe the trajectory tracking effect of a vehicle system. Therefore, it is necessary to study multidimensional evaluation methods.
Aiming at studying multidimensional evaluation system of tracking control strategies, an integrated tracking control evaluation system based on subjective and objective weighting is proposed and applied to five tracking control strategies to prove its feasibility. In section “Tracking control strategies,” five tracking control strategies are established. The integrated tracking control evaluation system is proposed in section “Multidimensional evaluation system of tracking control strategies,” taking into account the tracking accuracy, driving stability, and ride comfort. The results of qualitative analysis and the quantitative analysis of five tracking control strategies are given in section “Multidimensional evaluation of tracking control strategies.” The conclusion is given in the final section.
Tracking control strategies
Lateral tracking control strategies
The essence of lateral tracking control is to establish the relationship between the deviation of the vehicle’s state parameters from their expected values and the steering wheel angle. In constructing a lateral tracking control strategy, the vehicle model can be selected from three types: geometric, kinematic, and dynamic vehicle models.
The geometric vehicle model is developed based on Ackerman steering configurations considering the vehicle’s dimensions, radius of turn, lateral deviation with no regard to velocity, and acceleration response. The kinematic vehicle model describes the motion of the vehicle body in terms of position, velocity, heading, and so on without internal dynamics, while dynamic vehicle model is defined by Newtonian equation of motions taking internal force and momentum into account.
At present, most of the mainstream lateral control strategies are based on the above three vehicle models integrated with other algorithms to produce the ideal steering wheel angle. According to the literature, this article constructs a variety of typical lateral control strategies based on the above vehicle models (the pure pursuit has been a standard benchmark to validate a new controller. It is described in detail in Snider’s work; Stanley is a famous algorithm based on the study of a Stanford team that won the second Defense Advanced Research Projects Agency (DARPA) Championship; the basic kinematic tracking control strategy is derived in De Luca’s work; the feedforward dynamic control strategy is based on the preview following theory, which is proposed by Guo).23–26
Geometric tracking control strategy
The geometric tracking control strategy establishes the relationship between the heading deviation of the vehicle from the desired path, the lateral deviation, and the steering wheel angle. It adjusts the steering wheel reducing the heading deviation and lateral deviation. This control method can be divided into the preview geometric model and the non-preview geometric model.
Preview geometric tracking control strategy
Pure pursuit is a typical preview geometric tracking control strategy with feedforward features, which has been a standard benchmark to validate a new controller. It is described in detail in Snider’s 23 work. It assumes that the vehicle will travel along a circular arc to the preview point of the path, the chord length of the arc being the distance from the preview point to the center of the rear axle of the vehicle.
A schematic diagram of this control strategy is shown in Figure 1, where



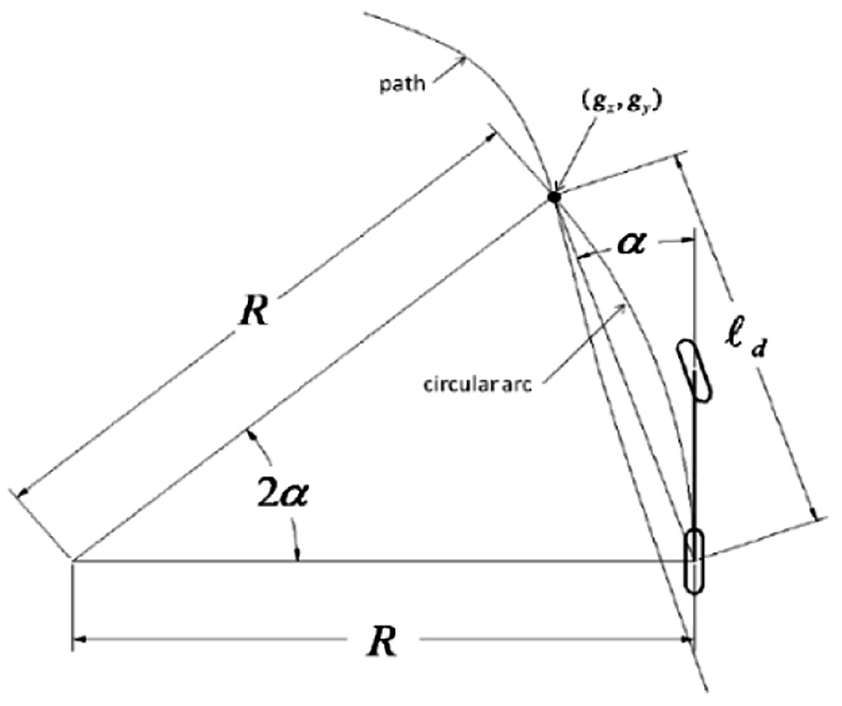
Pure pursuit principle.
Thus, the steering angle can be derived by substituting equation (3) into equation (4) such that


In addition, the forward viewing distance

Non-preview geometric tracking control strategy
Stanley is based on the study of a Stanford team that won the second DARPA Championship in 2005. 24 The schematic is shown in Figure 2. The strategy utilizes the front wheel heading angle deviation and the lateral deviation to give feedback on the front wheel angle. The heading angle deviation is shown in equation (7), and the control law is shown in equation (8)


where

Stanley principle.
Kinematic tracking control strategy
The basic kinematic tracking control strategy is derived in De Luca et al.’s 25 work, establishing the relationship between the heading angle deviation, distance deviation, and steering wheel based on vehicle displacement, vehicle speed, yaw angle, and front wheel angle, forming a feedback control. The strategy considers the vehicle as a non-holonomic restraint system, assuming that the vehicle does not slip laterally and that only the front wheels can turn. The left and right wheels have the same characteristics and are simplified into a bicycle model. The constraint equations for the front and rear wheels of the kinematic model are shown in equations (9) and (10)


where
The geometric relationship between the front and rear wheels of the vehicle is shown in equations (11) and (12)


By combining the above formulas, the relationship between the front wheel angle and the wheelbase, the heading angular velocity, and the longitudinal vehicle speed can be obtained, as shown in equations (13) and (14)


Thus, the desired value of the front wheel angle

The relationship between the lateral deviation and the heading angle difference can also be established, as shown in Figures 3 and 4 and equations (16)–(18), where




Kinematic model.

Kinematic lateral deviation model.
In summary, according to the vehicle kinematics model, the front wheel angle is obtained as shown in equation (19)

Dynamic tracking control strategy
Most of the dynamic tracking control strategies utilize a two-degrees-of-freedom vehicle model to construct the relationship between vehicle force, velocity, lateral acceleration, and the yaw rate. The basic differential equation is shown in equations (20) and (21)


where
In this article, two control strategies based on the dynamic model are established: the feedforward and the feedback dynamic control strategies. The feedforward dynamic control strategy is based on the preview following theory, which is proposed by Xin. 26 It assumes that there is only one preview point. The relationship between the preview point deviation and the vehicle’s lateral acceleration is shown in equation (22). Considering the vehicle’s dynamic response, the Laplace transform is performed on equations (20) and (21), and the lateral acceleration and steering wheel angle transfer function is derived, as shown in equation (23). Considering it is difficult for the driver to perform high-order calculations of parameters while driving, the second-order and above terms are ignored, yielding the relationship between lateral acceleration and steering wheel angle


In the above equations,
Inspired by Guo’s work, we proposed a dynamic feedback control strategy. The dynamic feedback control strategy establishes the relationship between the yaw rate’s deviation value, the lateral position deviation, and the lateral control parameter. It establishes the relationship between the lateral deviation value and the steering wheel angle by means of the steady-state yaw rate gain derived from the dynamic model, as shown in equations (24)–(26), and takes the PID as the feedback control method as shown in equation (27). Then, the actual output value of the steering wheel angle is obtained as shown in equation (28)





where
Longitudinal tracking control strategy
The longitudinal tracking control strategy mainly adjusts the vehicle’s speed by controlling the throttle opening and the brake pedal so as to maintain the desired speed. Driving experience should be considered when establishing the longitudinal control strategy. This article aims to use the incremental PID control algorithm combined with the throttle brake switching strategy extracted from driving experience as the longitudinal tracking control strategy.
Longitudinal tracking control algorithm
The longitudinal tracking control takes the deviation between the desired vehicle speed and the current actual vehicle speed as the input to the controller. The deviation between the desired vehicle speed and actual speed is taken as input by the longitudinal tracking controller. Based on the incremental PID algorithm, the controlled variable



where
Longitudinal tracking control throttle and brake switching strategy
After the controlled variable has been acquired, the control of the throttle and the brake pedal must be determined according to the magnitude of the controlled variable. When the actual vehicle speed is lower than the desired vehicle speed, the controlled variable is positive, and throttle action is required to achieve acceleration. When the actual vehicle speed is higher than the expected vehicle speed, the controlled variable is negative, and deceleration needs to be achieved by means of control of the brake pedal. In order to avoid frequent switching between the throttle valve and the brake pedal, a dead zone should be set so that, when the speed deviation is in the dead zone, the throttle valve and the brake pedal are not operated. Also, the output values of the throttle valve and the brake pedal must not exceed their limits. The switching law is shown in equation (32)

where
Coupled longitudinal and lateral tracking control strategy
Generally, in the study of automatic vehicle control, the implementation of lateral control (steering control) and longitudinal control (speed control) is usually accomplished by the separate design of two independent controllers that are not connected, while the effects of mutual coupling are ignored. However, the actual vehicle system is a complex, nonlinear, variable parameter coupling system with serious uncertainties. In the longitudinal control, speed is the controlled quantity, and in the lateral control, speed is an important influencing factor. The vehicle speed information is included in the design of the control laws of the feedforward and feedback lateral controls. In the lateral control, the preview distance is positively correlated with the vehicle speed. The feedback control strategy also considers the influence of the vehicle speed when establishing the lateral deviation and the steering wheel angle. Therefore, the lateral and longitudinal controls can be linked by the speed. In the lateral control, it is assumed that the longitudinal velocity is kept constant within a step that achieves decoupling. Based on this, five coupled longitudinal and lateral tracking control strategies are established in this article, as shown in Table 1.
Five coupled longitudinal and lateral tracking control strategies.
PID: proportion–integration–differentiation.
Multidimensional evaluation system of tracking control strategies
The coupled longitudinal and lateral tracking control strategy is mainly proposed so as to replace the driver’s control of the speed and direction of the vehicle. Therefore, it should exhibit the driving characteristics of excellent drivers, namely, skilled operation of the vehicle, such that it travels along the desired trajectory with the desired speed, the driving process is safe and comfortable, and these driving skills are maintained in different driving environments. Therefore, evaluating the strategies should fully consider those characteristics. Thus, this article chooses tracking accuracy, driving stability, and ride comfort as basic evaluation indexes, establishing multidimensional integrated tracking control evaluation system based on subjective and objective weighting (this article established a comprehensive evaluation system for the driving stability, which has a strong reference value for the evaluation system established in this article). 27
Basic evaluation indexes
Tracking accuracy
The coupled longitudinal and lateral tracking control strategy can be divided into a lateral and a longitudinal control strategy. Therefore, assessing the accuracy of the control strategy should balance assessment of the lateral and the longitudinal accuracy. The formulas for calculating the lateral trajectory deviation and the longitudinal velocity deviation are shown in equations (33) and (34)


where


where
Driving stability
Vehicle driving stability mainly refers to the lateral stability of the vehicle. For small vehicles, lateral instability mainly includes the side slip and yaw instability. Lateral acceleration and centroid side angle are typical stability evaluation indexes. When the actual value is less than a certain range, the vehicle tends to be in a steady state. Therefore, the following indicators are used to evaluate driving stability as shown in equations (37) and (38)


where
Ride comfort
Comfort is also a key factor for manned vehicles. The human body is sensitive to the rate of change of acceleration. When the acceleration changes greatly, it often forms an impact, which causes the driver to feel uncomfortable. Therefore, this article selects the lateral jerk and the longitudinal jerk to characterize the driver’s comfort. The specific ride comfort indicators are as follows (which are shown in equations (39) and (40))


where
Subjective weight
Subjective evaluation can reflect the true feelings of passengers and the preference for relevant indexes to a certain extent. The subjective evaluation mainly compares the basic indexes by consulting experts and determines the subjective evaluation weights corresponding to each basic indicator based on experience. Subjective evaluation weights are shown in Table 2.
Subjective evaluation weights of each index.

Object weight
According to the data characteristics of multi-sample and multi-indexes presented in this article, the entropy weight method is used to determine the objective weight of each evaluation index. For
Considering different indexes differ in unit, basic indexes constructed in this article have been dimensioned by the ratio mode. The objective weight calculation method is as shown in the equations (41)–(43)



where
Multidimensional integrated tracking control strategies evaluation indexes
In order to take into account subjective preferences and objective weights by optimizing the decision model, as shown in the equation, the subjective and objective integrated weights are calculated, as shown in the equation. The multidimensional integrated tracking control strategies evaluation indexes is shown in equations (44)–(47)




The multidimensional evaluation indexes could provide a more comprehensive evaluation result of tracking control strategy. In addition, the tracking control should be robust under different conditions. The robustness of tracking control strategies could be estimated by the change trend of the comprehensive indexes.
Multidimensional evaluation of tracking control strategies
Five tracking control strategies are evaluated from qualitative and quantitative aspects through co-simulation of CarSim and Simulink. A C-Class vehicle with default setting is chosen as subject. There are two typical test scenarios including double lane change and Alt3 from Federal Highway Administration (FHWA), as shown in Figure 5. The test speeds range from 10 to 20 m/s, corresponding to low, medium, and high speeds.

Two typical test scenarios: (a) double lane change and (b) Alt3 from FHWA.
Low-speed evaluation
Qualitative analysis of tracking control strategies under low-speed condition
The performance of tracking control strategies under the low-speed double-lane-change condition is shown in Figure 6.

Performance of tracking control strategy under the low-speed double-lane-change condition.
Under the condition of low speed, the tracking accuracy, driving stability, and comfort of each tracking control strategy are within acceptable limits. Among them, Model 4 and Model 5 are outstanding with low lateral deviation, acceptable lateral acceleration, and low lateral jerk; Model 1 and Model 2 perform similarly, which is more suitable for low-speed condition. The lateral tracking result of Model 3 is satisfactory, but its ride comfort is poor with large lateral jerk.
Multidimensional evaluation of tracking control strategies under low-speed condition
The integrated indexes of tracking control strategies under low speed are shown in Table 3.
Multidimensional integrated indexes of tracking control strategies under low speed.

Considering that the integrated index is a negative indicator, the smaller the index value is, the better the comprehensive effect of the tracking control strategy is. The comprehensive effect of Model 4 and Model 5 is excellent, and the comprehensive evaluation indexes of Model 1 and Model 2 are also small, which is suitable for low-speed working conditions. Model 3’s comprehensive performance is slightly worse. At low speeds, the qualitative analysis results and the quantitative analysis results are consistent.
Medium-speed evaluation
Qualitative analysis of tracking control strategies under medium-speed condition
The performance of each tracking control strategy under the medium-speed double-lane-change condition is shown in Figure 7.
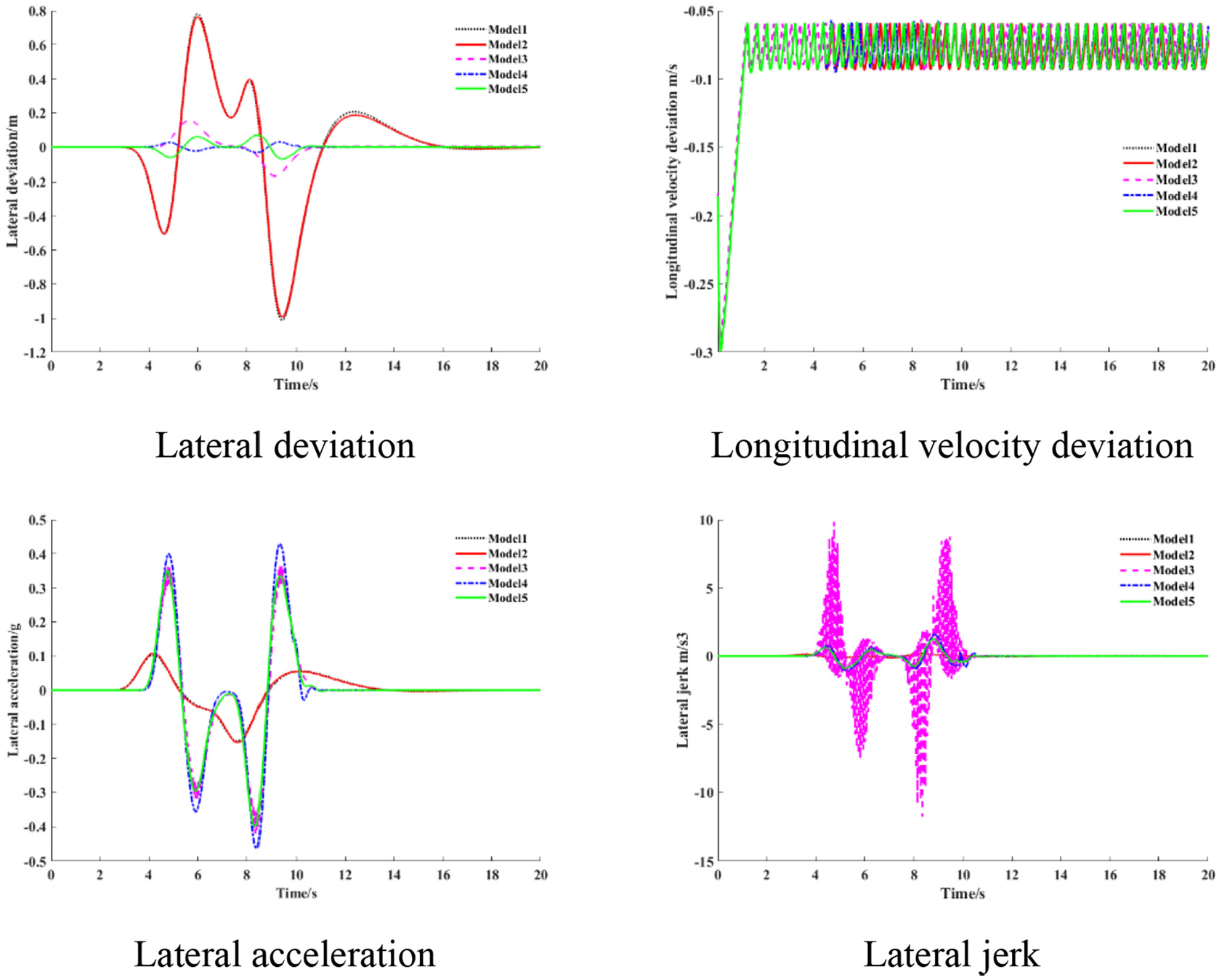
Performance of tracking control strategy under the medium-speed double-lane-change condition.
Under medium-speed condition, the tracking effect of the longitudinal speed is still ideal, and the speed deviation is stable at about 0.1 m. In terms of the lateral tracking effect, the maximum lateral deviation of Model 1 and Model 2 is close to 1 m, and the tracking effect is not good. Therefore, Model 1 and Model 2 are not suitable for scenes with high speed. The lateral tracking deviation of other models is less than 0.5 m, and the tracking effect is still acceptable. However, the lateral jerk of Model 3 is high so that the driving comfort is poor. Therefore, Model 1 and Model 2 are still ideal trajectory tracking strategies.
Multidimensional evaluation of tracking control strategies under medium-speed condition
The integrated indexes of tracking control strategies are shown in Table 4.
Multidimensional integrated indexes of tracking control strategies under medium speed.

In the case of medium speed, by analyzing the multidimensional integrated evaluation index, the index value of Model 1 and Model 2 are relatively small, and the comprehensive effect of trajectory tracking is superior. The tracking control strategy corresponding to Model 5 is optimal. The comprehensive evaluation index of other models is relatively high, and the trajectory tracking is slightly worse. Among them, Model 3 has the worst comprehensive control effect. Therefore, under medium speed, the results of multidimensional integrated evaluation are still consistent with the qualitative analysis results.
High-speed evaluation
Qualitative analysis of tracking control strategies under high-speed condition
The performance of each tracking control strategy under the high-speed double-lane-change condition is shown in Figure 8.

Performance of tracking control strategy under the high-speed double-lane-change condition.
Under high-speed condition, although the control of the longitudinal tracking control strategies is fluctuating, the speed deviation is always in the range of 0.3 m/s, except in the initial stage. The trajectory tracking ability of both Model 1 and Model 2 is further deteriorated. Although their lateral acceleration is kept within 0.4g, their lateral deviation is excessive enough to make the application of these strategies limited at high speeds. Model 3 still maintains good robustness at high speeds, but its comfort deteriorates further and this would have a negative impact on its application. Model 4 and Model 5 are still outstanding in terms of the accuracy of their trajectory tracking, but Model 4 fluctuates in terms of its lateral deviation at high speeds, whereas Model 4’s tracking accuracy is more stable. Considering that the curvature of trajectory under double lane change is small, when the vehicle speed is high, the lateral acceleration easily exceeds 0.4g. Model 4 shows great lateral instability at high speeds, with a maximum lateral acceleration of up to 0.8g, far beyond a safe level. The lateral jerk of the steering wheel fluctuates drastically and the comfort deteriorates. Model 5 is slightly better than Model 4. The lateral acceleration of Model 4 keeping within 0.7g, and its lateral jerk do not fluctuate drastically.
Multidimensional evaluation of tracking control strategies under high-speed condition
Based on multidimensional evaluation system, the integrated indexes of tracking control strategies under high speed are shown in Table 5.
Multidimensional integrated indexes of tracking control strategies under high speed.

By analyzing the multidimensional integrated tracking control evaluation index, the index values of Model 1, Model 2, and Model 3 are further increased, and the comprehensive control effect is deteriorated. In the case of high speed, the comprehensive evaluation index value of Model 4 has risen sharply, and the multidimensional comprehensive control effect has been weakened. The integrated evaluation index of Model 5 has the smallest value, so the comprehensive control effect is optimal. Therefore, in the case of high speed, it is more appropriate to adopt the tracking control strategy corresponding to Model 5. The comprehensive evaluation results are similar to the qualitative evaluation results.
In summary, qualitative analysis of multiple tracking control strategies and quantitative analysis based on multidimensional integrated evaluation system are carried out under various vehicle speeds. The results show that the quantitative analysis results based on the multidimensional integrated index are consistent with the qualitative analysis results, which preliminarily demonstrates the feasibility and effectiveness of the multidimensional integrated evaluation system based on subjective and objective comprehensive weighting.
Robust evaluation
The actual driving scene of the vehicle is various. The route and the prescribed speed are often different. Therefore, the tracking control strategy should be robust and maintain accurate, stable, and comfortable tracking control under different driving conditions, so the robustness of various tracking control strategies is basically evaluated. The test scenario of this article covers three kinds of speed (10, 15, and 20 m/s), two typical test scenarios (double lane change and Alt). Based on the multidimensional integrated evaluation system, the five kinds of tracking control strategies under different scenarios are comprehensively evaluated. The evaluation indexes are normalized. The comprehensive evaluation results of different driving speeds of the two types of test scenarios are shown in Figures 9 and 10.

Multidimensional integrated evaluation of different tracking control strategies under double-lane-change scenario with different speeds.

Multidimensional integrated evaluation of different tracking control strategies under Alt3 scenario with different speeds.
In summary, different tracking control strategies have different tracking control effects under different test scenarios. By comparing the result of evaluation of two test scenarios, it is obvious that Model 1 and Model 2 are more suitable for tracking control under low-speed conditions. The tracking control strategy corresponding to Model 3 has a poor control effect. Model 4 and Model 5 are more robust and can maintain optimal tracking control performance under different test scenarios and speeds. Model 5 has the best tracking control effect.
Conclusion
This article proposes a multidimensional integrated tracking control evaluation system based on subjective and objective weighting. Five different tracking control strategies under two typical scenarios with different velocities are evaluated. The co-simulation results are analyzed from qualitative and quantitative aspects. The consistency of results of qualitative analysis and the quantitative analysis based on multidimensional integrated evaluation system verify the validity and feasibility of the evaluation system. The results show that the tracking control strategy corresponding to Model 1 and Model 2 is suitable for low-speed condition. The tracking control strategy corresponding to Model 3 is poor in ride comfort, which is not appropriate for manned vehicle. The tracking control strategies corresponding to Model 4 and Model 5 are robust enough for the application in different scenarios. Model 5 is the optimal tracking control strategy. The multidimensional integrated evaluation system could evaluate the tracking control strategies in a comprehensive way, taking the tracking accuracy, driving stability, ride comfort, and robustness into account. Connected and Automated Vehicle (CAV) driving strategies would have different properties, which may need a supplement of the evaluation system and is not covered in this study yet. We will continue this study and discuss these possible implementations in our future work (CAV tracking control strategies would have different properties which could expand our study). 28
Footnotes
Acknowledgements
The authors thank KingFar International Inc. Technology Center for providing the ErgoLAB cloud platform for Human–Machine–Environment data analysis and professional suggestions on experimental design.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Science Foundation of China (grant no. 51578262).