
Abstract
Ceramic bearings have a good dynamic output performance under an ultra-high, ultra-low temperature due to their small deformation property. Based on the Harris and Palmgren empirical equation, this article establishes the thermal transfer model of a ceramic motorized spindle. The thermal deformation of a ceramic angular contact ball bearing is calculated. A dynamic and thermal coupling model of the ceramic motorized spindle is built using the Hertz contact theory, which can determine the optimal preload force under different rotating speed conditions. The influence of different temperatures, preload, and rotation speeds on the bearing vibration characteristics was studied. The accuracy of the dynamic and thermal coupling model was verified by the motorized spindle experimental platform. The results show that the thermal deformation of the bearing is an important influencing factor for the output of the dynamic characteristics. Considering the thermal displacement of the bearing, the simulation accuracy of the ceramic motorized spindle-bearing system is in good agreement with the experimental results. By adjusting the bearing preload, the parameters of the rotating speed can effectively reduce the temperature rise and suppress the vibration. The spindle-bearing system model provides a theoretical basis for the dynamic development of a high-speed ceramic bearing.
Keywords
Introduction
In the high-speed operation of motorized spindle, stator loss, rotor loss, and bearing friction generate a lot of heat. The thermal deformation of a bearing is directly related to the dynamic output performance of motorized spindles.1,2 Ceramic bearings are suitable for ultra-high-temperature and ultra-low-temperature extreme environments due to high stiffness and small deformation. The bearing preload, lubrication, external load, friction, and other influencing factors are gradually improved. Thermal deformation has become an important factor that cannot be ignored in the dynamics of ceramic bearings.3–5 Scholars have conducted a significant amount of research on the dynamic performance, thermal deformation, and temperature field of motorized spindle-bearing systems. DX Zheng and WF Chen et al. 6 applied the comprehensive thermal grid model to calculate the thermal performance of high-speed angular contact ball bearings. Nevertheless, it is difficult to use it to analyze the thermal characteristics of a motorized spindle-bearing unit during its design phase. T Liu et al. 7 used the finite element (FE) simulation technique to accurately analyze the thermal errors of a motorized spindle unit. However, they lack discussion of the mechanism of the ceramic bearing thermal performance. RS Moorthy and V Prabhu 8 presented a prediction model to estimate the heat generation in angular contact ball bearings, which considered the thermal behavior of bearings. VT Than and JH Huang 9 estimated the thermal influences on contact angles, contact forces, preload, temperature, and stiffness of bearings, and XH Li et al. 10 proposed a new non-uniform preload for a spindle-bearing system to analyze the static and rotational performances of the spindle under external loading, investigating the influence of non-uniform preload on the static and rotational performance of a spindle-bearing system. YF Zhang et al. 11 employed angular contact ball bearing heat generation, in which bearing contact parameters, external loads, rotation speeds, and bearing preload conditions were fully considered. However, it should be noted that the current modeling of bearings is mainly focused on regular stiffness, and there has not been any report on the high stiffness modeling of bearings in the literature. ST Xi et al. 12 presented a dynamic model of a spindle-bearing system to calculate the vibration using the discrete element method, with each bearing component owning 6 degrees of freedom (DOFs). Z Liu et al. 13 built an FE model of a spindle using ANSYS to study the temperature distributions and thermal deformations of the spindle at different speeds. KS Kim et al. 14 estimated the equilibrium temperature on an angular contact ball bearing in a spindle system, considering the frictional torque of the bearing, which was calculated using the finite element method (FEM). IA Zverev and AR Maslov 15 studied the spindle speed and load, and the preliminary tension of the bearing was found to have deep effects on the frictional and thermal characteristics of a spindle. However, the currently developed dynamic models of spindle-bearing systems did not consider the small thermal deformations of ceramic in some high-temperature environments.
There are few research works on the dynamic characteristics of the ceramic angular contact ball bearings of high-speed ceramic motorized spindles. The preload and thermal deformation of ceramic bearings affect the dynamic output of the spindle and bearing stiffness. In this article, a heat transfer mechanism is applied to obtain the temperature of each component of a spindle. The empirical equations of Harris and Palmgren were used to calculate bearing heat generation, temperature rise, and thermal deformation. The nonlinear relationship between thermal displacement and bearing stiffness is analyzed. The dynamic and thermal coupling model of a ceramic motorized spindle and bearing system is built using the Hertz contact theory. The influence of the inner and outer ring and of the ball of an angular contact ball bearing on the bearing dynamics, with changes in temperature, thermal deformation, rotation speed, and other factors, was studied. A dynamic and thermal coupling model of a ceramic motorized spindle and bearing system was established. The nonlinear equation of bearing dynamics is solved by the Newton–Raphson method. The optimal preload force at different speeds and temperatures was determined to reduce the vibration of the bearing. The accuracy of the motorized spindle dynamic and thermal coupling model is verified by a motorized spindle experimental platform. Under some extreme conditions, the dynamic and thermal coupling model of the ceramic motorized spindle and bearing system can predict the dynamic characteristic output of the motorized spindle with high accuracy and provide a theoretical basis for the development of a high-speed ceramic bearing.
Ceramic motorized spindle-bearing system thermal model
This article uses the ceramic spindle as the prototype to study the thermal and dynamic characteristics of a spindle-bearing system, as shown in Figure 1. The front ceramic bearings (7009C) and the rear ceramic bearings (7008C) are angular contact ball bearings which represent back-to-back combination mode. The bearings and shaft adopt interference fit. The rotor is hot-pressed on the shaft. The air gap between the rotor and the stator is 0.3 mm. The temperature and flow of spindle cooling liquid were adjusted by the cooler. The cooling jacket had a rectangular cross section in the spindle shell. In the running process of the high-speed ceramic motorized spindle, the stator and rotor loss of the spindle and the high-speed rotating friction of the bearing generate a lot of heat, which causes thermal deformation of the bearing. The deformation seriously affects the stiffness and dynamic characteristics of the bearing, and it then affects the dynamic output characteristics of the bearing.

The configuration of the spindle-bearing system.
Ceramic motorized spindle thermal model
Motorized spindle-bearing system heat generation is caused by copper consumption, iron consumption, mechanical loss, and bearing friction. The heat induces the radial and axial thermal displacement of the bearing. The stator is fixed in the motorized spindle and controlled by a frequency converter. The output power of the motorized spindle is shown in equation (1) 16

where P1 is the output power(W), U1 is the voltage (V), and I1 is the current (A).
A large amount of harmonic loss, hysteresis loss, eddy current loss, and mechanical loss occur during the normal operation of the motorized spindle. The losses of the motorized spindle are shown in equation (2) 17

where PFe is the iron loss (W), PCu is the copper loss (W), and Pm is the mechanical loss (W).
According to the Harris and Palmgren empirical equation, the bearing friction torque M 18 is calculated, the friction torque M0 is generated through oil–air lubrication under no load, and the friction torque M1 is generated through oil–air lubrication under a load. The frictional heat between the ball and raceway of the contact area of the bearing is shown in equation (3)

where Hf is the heat of the bearing friction, M is the total moment of the bearing friction (N mm), and n is the bearing speed (r/min).
The bearing friction torque is shown in equation (4) 19

where f1 is the structure and load correlation coefficient of the bearing, f1 = 0.001, and p1 is the calculated bearing load (N).
The friction torque generated by oil–air lubrication under no load is directly related to the kinematic viscosity and angular velocity, as shown in equation (5)

where f0 is related to the design type, speed, oil lubrication, and angular contact of the bearing, f0 = 1.7; v is the kinematic viscosity; and dm is the diameter of the bearing pitch circle (mm).
According to the raceway theory of the inner and outer ring of bearings, the bearing spin friction torque has a direct relationship with the spin speed and contact load of the ball. The spin friction torque between the raceway of the inner and outer ring of the bearing and ball is shown in equation (6)

where Msi and Mso are the spin friction coefficient between the ball and the inner and outer ring raceway of the contact area (N mm), Qi and Qo are the normal contact load between the ball and the raceway of the inner and outer ring (N), ai and ao are the elliptical major axis of the inner and outer raceway Hertz contact, and Σ i and Σ o are the second kind of elliptical integration in the inner and outer raceway contact region.
The motorized spindle uses a water-cooling system and bearing oil–air lubrication system to cool the stator, rotor, bearing, bearing seat, and other parts. There are many convection, radiation, and heat transfer areas in the motorized spindle. The stator, rotor, and air gap; bearing and oil–gas lubrication; cooling water; and cooling channel belong to forced convection heat transfer. The surface of the motorized spindle and air belong to natural convection heat transfer. The relationship between convective heat transfer and speed is shown in Figure 2. With the increase in spindle speed, the convective heat transfer coefficients present a nonlinearly increasing relationship. The convective heat transfer coefficient between the bearing and the air is higher than that between the shaft end and the air. The boundary conditions of the motorized spindle main components, convective heat transfer coefficient, and Nusselt number are shown in Table 1.
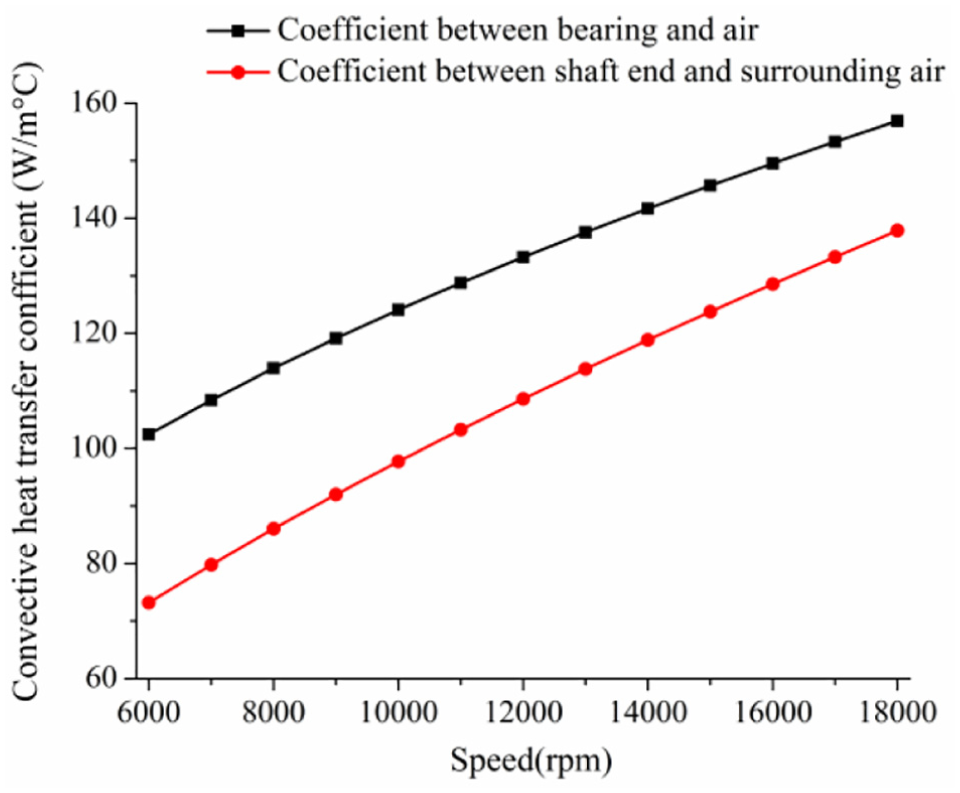
The relationship between convective heat transfer and speed.

According to the internal heat transfer of the motorized spindle and the conservation method of heat convection energy, the relationship between heat transfer coefficient and temperature is obtained, as shown in equation (7) 22

where Q is the heat transfer rate (W/m3); ρ1 is the solid density (kg/m3), ρ2 is the fluid density (kg/m3); Cp1 and Cp2 are the atmospheric heat capacity of the solids and fluids, respectively (J/kg °C); T is the spindle temperature (°C); v is the fluid velocity (m/s); ∇ is the Laplace operator; k is the heat conductivity coefficient (W/(m °C)); qc is the convective heat flux (W/m2); qt is the transfer heat flux (W/m2); and Tf is the temperature of the fluid medium (°C).
According to equation (7), the temperature distribution field of the ceramic motorized spindle is obtained by simulation, as shown in Figure 3. It can be seen from the figure that the rolling body of the bearing has the highest temperature due to the friction with the inner and outer ring, and the temperature of the front bearing is higher than that of the rear bearing under the action of load and friction. The rotating shaft near the bearing is affected by the heat transfer of the bearing, which is generally higher than other regions. The temperature of the stator is lower than that of the rotor, which is mainly affected by the cooling water. The temperature near the cooling jacket is the lowest.
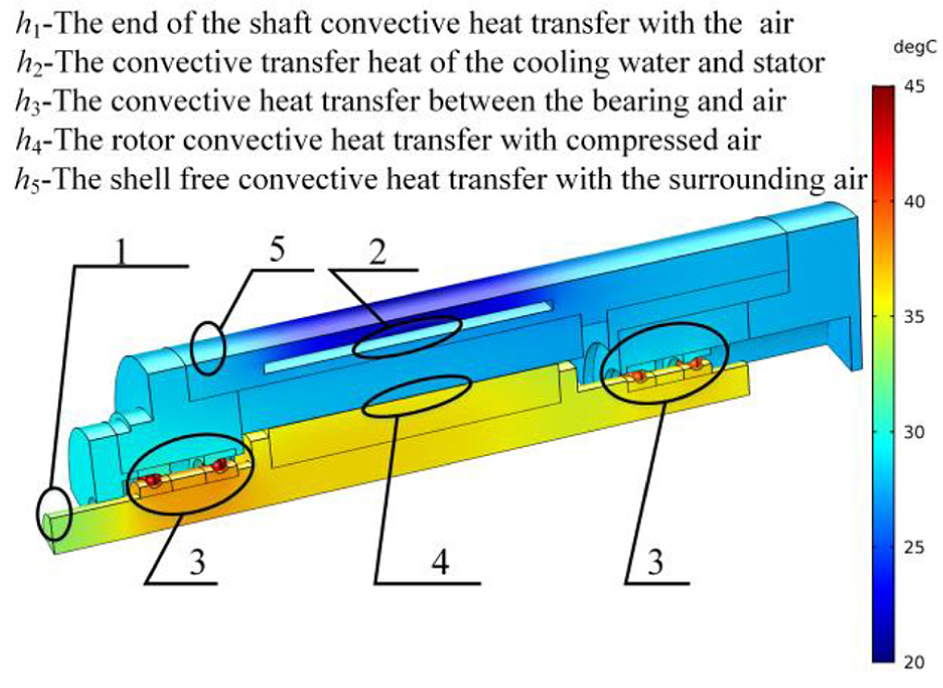
The distribution temperature field of ceramic motorized spindle.
Temperature field analysis of a ceramic bearing
The environmental temperature is 25°C, the cooling water flow rate is 10 L/min, the compressed air pressure is 0.36 MPa, the front bearing is 7009, the rear bearing is 7008, and the motorized spindle rotational speed is 12,000 r/min under these conditions. According to equations (2), (3), and (7), the simulation calculation of the relationship between bearing transient temperature field and time is shown in Figure 4. The relationship between a steady temperature and rotation speed of the bearing is shown in Figure 5. As can be seen, from Figure 4, with the increase in time in the initial stage of the bearing, the time and bearing temperature of each part show a nonlinear increasing relationship. With the increase in time, the bearing temperature rise rate decreases. After the bearing runs for about 21 min, each bearing component reaches approximately a stable state. The specific parameters of the angular contact ball bearing are shown in Table 2.

The simulation calculation of the relationship between bearing transient temperature field and time.

The relationship between a steady temperature and rotation speed of the bearing.
The specific parameters of angular contact ball bearing.

According to the relationship between a steady temperature and rotation speed of the bearing, shown in Figure 5, the steady state temperature and rotation speed of the bearing show a nonlinear increasing relationship. The temperature of the front bearing is higher than that of the rear bearing, and the difference between the temperature has an increasing relationship with rotation speed. The main reason for this is that the size of the inner and outer ring of the front bearing is larger than that of the rear bearing, and the centrifugal force, friction, and contact load of the front bearing are larger than those of the rear bearing. The temperature of the ball of the bearing is higher than that of the inner ring. The temperature difference increases with the increase in rotation speed, which is consistent with the trend of the inner and outer ring. At a rotation speed of 18,000 r/min, the ball temperature of the front bearing is 64.8°C. The temperature of the inner ring is 49.8°C, the temperature of the outer ring is 38.9°C, the temperature difference between the ball and the inner ring is 15°C, and the temperature difference between the inner ring and the outer ring is 11°C. With the increase in speed, the rotation and revolution of the ball are obvious, the centrifugal action is enhanced to produce sliding with the inner and outer ring, and the rolling friction increases. Friction heating is the main reason for the high temperature of the ball. The temperature of the inner ring of the bearing is higher than that of the outer ring, because the outer ring of the bearing is in an approximate static state and close to the cooling channel. At the same time, the stator and the rotor of the motorized spindle generate heat. The inner ring of the bearing and the rotor are in an interference fit, and the inner ring of the bearing is more affected by the heat conduction of the rotor than the outer ring.
Figure 6 shows the relationship between ball temperature and preload force. There is a nonlinear increasing relationship between ball temperature and preload force. Under the conditions of medium and high rotation speeds and a large preload force, the rolling body temperature increases with the increase in speed, which is more obvious than under a medium or low preload force. Under a bearing condition of 18,000 r/min and a preload force of 500 N, the ball temperature is 74.2°C, which increases by 9.4°C and 17.1°C, compared with the preload force of 400 N and 300 N, respectively.

The relation between ball temperature and preload force.
Dynamic and thermal coupling model of a ceramic motorized spindle-bearing system
The high-speed rotation of the angular contact ball bearing is accompanied by centrifugal force, which may lead to sliding of the rolling body and gyroscopic rotation. At the same time, the heat generated by the friction between the bearing raceway and the ball causes thermal deformation of the bearing when the temperature rises, which affects the rapid increase in the contact load and temperature rise of the bearing. The temperature and geometry of each part of the bearing change. The heat generation has a nonlinear increasing relationship with friction torque and rotation speed. The angular contact ball bearing friction mainly consists of rolling friction and sliding friction. Ball friction mainly occurs when the ball rolls over the contact surface of the inner and outer raceway. Sliding friction occurs in the contact area between the cage, ball, and inner and outer ring raceway.
Analysis of bearing thermal displacement
In the process of the high-speed rotation of the bearing, a large amount of heat is generated by friction. Bearing expansion is caused by the temperature rise. The thermal displacement of the bearing expansion is shown in Figure 7.
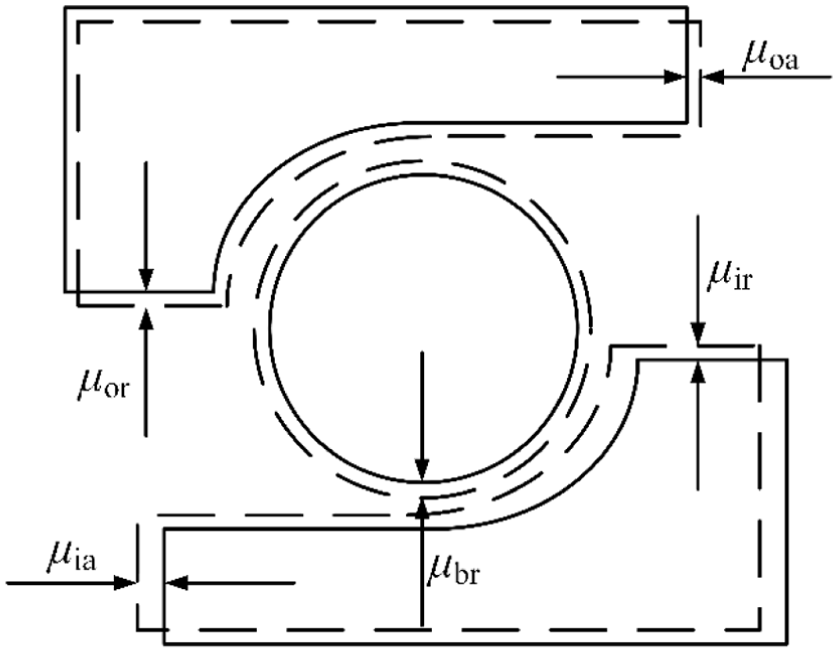
The thermal displacement of the bearing expansion.
The solid profile of the bearing is the matching position of the inner and outer ring raceway of the ceramic bearing, before the temperature rise. The dotted line is the relative position of the thermal displacement of the inner and outer ring raceway of the bearing, after the temperature rise. The thermal displacement of the bearing makes the relative position of the inner and outer ring raceway of the bearing change, which leads to a change in the contact angle and contact load between the ball and the inner and outer ring of the bearing and causes a change in the dynamic performance output of the bearing.
The thermal displacement of the inner ring, outer ring, and ball of the bearing is calculated using the Harris theory. The radial thermal displacement of the bearing inner ring raceway under the action of the bearing inner ring temperature rise is calculated, as shown in equation (8)

The radial thermal displacement of the bearing inner ring raceway, under the action of the bearing outer ring temperature rise, is calculated, as shown in equation (9)
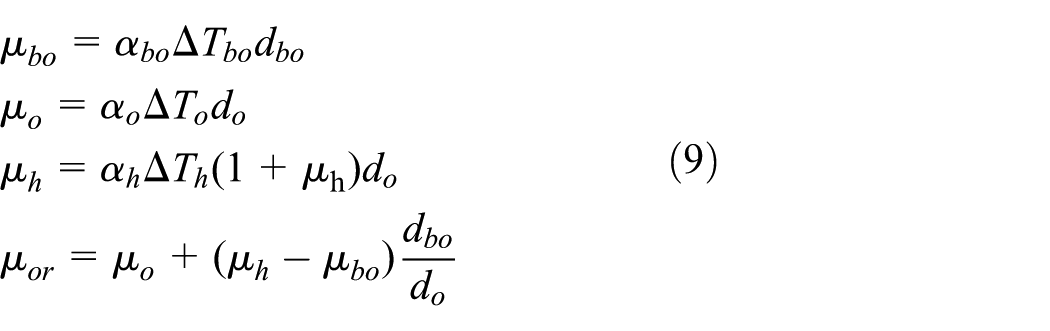
where α is the thermal expansion coefficient of the bearing inner ring, and
According to equations (8) and (9), the ball expansion of the bearing and the radial relative thermal displacement of the bearing are calculated, as shown in equation (10)

Between the inner ring of the bearing and the adopted rotating shaft interference mode, the axial displacement of the inner and outer ring raceway of the bearing is equal. Therefore, the axial thermal displacement of the inner ring, outer ring, and ball of the bearing can be calculated, as shown in equation (11)

According to equations (10) and (11), the inner ring, outer ring, and ball thermal displacement of metal and ceramic bearings can be calculated, as shown in Figure 5. As can be seen from Figure 8(a), the radial thermal displacement of the bearing shows that the thermal displacement of the front bearing is larger than that of the rear bearing, which is mainly affected by the temperature of the front bearing being higher than that of the rear bearing. The thermal displacement has a direct relationship with temperature change. From 6000 to 18,000 r/min, the radial thermal displacement of the ceramic and metal front bearings increased by 5.91 and 11.7 μm, respectively.

The inner ring, outer ring, and ball thermal displacement of the metal and ceramic bearings: (a) radial thermal displacement of the bearing and (b) axial thermal displacement of the bearing.
There is a direct increasing relationship between thermal displacement and rotational speed. The thermal displacement increases as the speed increases. The ceramic bearing material has high stiffness and large elastic modulus property, so the thermal displacement of the ceramic bearing is much smaller than that of the metal bearing. The thermal displacement of metal bearing 7009 can reach 16.68 μm under a steady state of 18,000 r/min, and that of ceramic bearing 7009 can reach 8.2 μm. Figure 8(b) shows that the axial thermal displacement variation is approximately consistent with the radial thermal displacement variation trend. The axial thermal displacement of the bearing is slightly larger than the radial thermal displacement due to the bearing preload acting in the axial direction.
Analysis of bearing stress
The contact force between the ball and outer ring, and the ball and inner ring of the bearing belongs to the Hertz elastic contact theory. Under the radial contact pressure Q, the contact parts of object 1 and object 2 form an elliptical contact surface. The elliptic long axis a and short axis b are shown in Figure 9. According to the elliptical contact surface between the ball and the bearing raceway, the contact ellipse size is obtained by applying the Hertz theory. The relationship between contact load of the ball and curvature radius of the bearing raceway is shown in equation (12) 23

where Kik and Kok are the parameters related to the geometric parameters of the bearing (N/mm1.5), E is the elasticity modulus (MPa), ρ is the curvature, and δ is the contact deformation.

Hertz elastic contact.
The relationship between ball stiffness of the bearing and contact stiffness of the inner and outer ring of the bearing is shown in equation (13) 24

The radial dynamic stiffness of the bearing is shown in equation (14)

The bearing balance equation is established. The relative position between the center of the ball and the inner and outer ring raceway is shown in Figure 10. It can be seen that the raceway curvature center of the inner and outer ring and the center of the ball are on the line of BD. The bearing is affected by load and thermal displacement, and the change of the curvature center is not in the same line. The bearing position relationship is shown in equation (15)

where φj is the bearing angle (°C), αo is the initial contact angle (°C), δa is the axial displacement of bearing under load (μm), δr is the radial displacement of bearing under load (μm), θ is the angular displacement of the bearing under load, and BD is the distance of the curvature of the inner and outer raceway center.

The relative position between the center of the ball and the inner and outer ring raceway.
According to the Jones raceway theory, the geometric deformation equation of the ball bearing is shown in equation (16)

where X1j and X2j are the introduced Jones variables, δij and δoj are the contact deformation between the ball and the inner and outer ring, and fi and fo are the curvature ratio of the inner and outer ring radius to the ball.
Bearing dynamic model
In the process of the high-speed rotation of the bearing, an increase in temperature will cause a change in the oil film thickness and oil supply of the ball, along with the generation of towing force. The contact force, friction force, centrifugal force, towing force, and other coupling forces formed by self-rotation and the contact of the inner and outer ring act on the ball. A ball force diagram is shown in Figure 11.

A ball force diagram.
The boundary friction drag force of the ceramic ball bearing is generated by a convex body with a rough surface. The boundary friction force and oil film traction force together form the drag force between the ceramic ball bearing and the inner and outer ring raceway, as shown in equation (17)

where Tηij is the η direction of inner ring traction (N) and Tηoj is the η direction of outer ring traction (N)
The rolling friction force P of the ceramic bearing ball is shown in equation (18)
where Cp is the distance of the pocket hole (mm), η is the direction of the long axis, ε is the direction of the short axis, Rεj is the effective radius of the curvature of the ceramic ball and pocket hole in the ε direction (mm), Rηj is the effective radius of the curvature of the ceramic ball and pocket hole in the η direction (mm), and Dw is the diameter of the ball (mm).
The centrifugal force and gyroscopic moment of the ceramic bearing ball are shown in equation (19)
where Fcj is the centrifugal force of the ball (N), J is the inertia moment of the ball (N mm2), ω is the angular velocity (rad/s), and Mjk is the gyroscopic moment of the ball (N mm)
According to equations (17)–(19), the equation calculating the force balance between the ball and the inner ring is obtained, as shown in equation (20)

where FRηoj, FRηij are dynamic pressure friction between ceramic ball and entrance of outer, inner raceway in the direction of the long axis, respectively (N); FRηoj, FRηij are dynamic pressure friction between ceramic ball and entrance of outer, inner raceway in the direction of the short axis, respectively (N); and mb is the mass of the ball (kg).
The force balance equation of the inner ring of the bearing is shown in equation (21)25,26

Influence of preload force on the dynamic characteristics of bearings
The bearing dynamic model takes ceramic bearings 7009 and 7008 as research objects, considering the thermal deformation, towing force, centrifugal force, and multi-coupling effects on the bearing. According to the Hertz load and thermal displacement of the bearing, the stiffness of the angular contact ball bearing in relation to rotating speed and the influence of the contact angle are studied. Nonlinear equations of the bearing model were solved by the Newton–Raphson method. The influence of factors, such as rotation speed, preload force, and displacement, on the dynamic characteristics of the bearing is analyzed. The relationship between optimal preload force and bearing displacement, under different working conditions, is determined.
Analysis of bearing dynamic characteristics
The ceramic Si3N4 bearing has a high stiffness and large elastic modulus characteristics. By adjusting the bearing correction coefficient, the dynamic model of the ceramic bearing can be adjusted. According to the raceway control theoretical equations of the bearing system (equations (14)–(16)) and the axial and radial thermal displacement equations of the bearing (equations (10) and (11)), the simulation conditions include a preload force of 300–500 N and a rotation speed of 3000–18,000 r/min. The relationship between preload force and radial dynamic stiffness of the ceramic bearing is shown in Figure 12.

The relationship between preload force and radial dynamic stiffness of the ceramic bearing: (a) change in the radial stiffness without coupling factors and (b) change in the radial stiffness of thermal displacement.
The analysis of the relation between rotation speed, preload force, and radial stiffness of bearing shows that the radial dynamic stiffness of the bearing increases with the increase in preload force. It can be seen, from Figure 12(a), that without coupling factors, the radial dynamic stiffness of the bearing decreases with the increase in velocity, and the bearing shows a softening effect. When the preload force is 500 N and the rotation speed increases from 6000 to 18,000 r/min, the radial dynamic stiffness of the bearing decreases by 3 × 106 N/mm. Figure 12(b) shows that, considering the thermal displacement of the bearing, the radial dynamic stiffness of the bearing increases with the increase in velocity. The radial dynamic stiffness of the bearing increases by 7 × 106 N/mm, and the maximum value reached 2.74 × 108 N/mm. The increase in bearing speed causes the centrifugal force and the gyroscopic torque of the bearing to change. The temperature of the ball bearing and inner ring raceway increases, the axial thermal deformation of the bearing expansion increases, the axial preload force increases, and the radial deformation of the bearing expansion increases. The contact stress between the ball and the raceway changes, and the load on the inner ring and outer ring of the bearing increases, which is the main reason for the increase in ceramic bearing radial stiffness.
The relation between preload force, thermal displacement, and inner and outer ring angle is shown in Figure 13. According to the relationship between preload force and inner and outer ring angle of the bearing, shown in Figure 13(a), it can be seen that the contact angle of the outer ring of the bearing increases linearly with the increase in velocity. The increase in contact angle of the inner ring and velocity presents a nonlinear decreasing trend. The main reason is that with the increase in velocity, the centrifugal force increases, and the contact load of the outer ring increases, while the contact load of the inner ring decreases. The preload force is 300 N, the rotation speed increases from 6000 to 18,000 r/min, the contact angle of the inner ring decreases from 15.54°C to 13.31°C, and the contact angle of the outer ring increases from 16.13°C to 18.69°C. With the increase in preload force, the downward trend of the contact angle of the inner ring decreases, and the upward trend of the outer ring decreases. Under the condition of a 500-N preload force, the contact angle of the outer ring increases by 1.65°C, while the contact angle of the inner ring decreases by 1.35°C, which is only 65.4% and 73.9% of the change trend under the condition of a 300-N preload force. Axial loading increases contact load, and the contact angle of the inner and outer ring changes due to the change in relative position between the ball and the inner and outer ring raceway.

The relation between preload force, thermal displacement, and inner and outer ring angle: (a) the relationship between preload force and bearing inner and outer ring angle and (b) the relationship between thermal displacement and bearing inner and outer ring angle.
The analysis of the relationship between thermal displacement and inner and outer ring angle of the bearing is shown in Figure 13(b). It can be seen that under the conditions of a 400-N preload force and different rotation speeds of 6000–18,000 r/min, and comparing the thermal displacement with the uncoupled condition, the contact angle of the inner and outer ring decreases, and the contact angle of the inner ring decreases by 2.68°C, which is 1.59 times the decreasing trend under the uncoupled condition. As for the thermal displacement, the contact angle of the outer ring changes with the increase in rotation speed, which turns into an inflection point. The maximum contact angle of the outer ring, under the condition of 15,000 r/min, is 16.01°C, and the contact angle of the outer ring, under the condition of 6000–15,000 r/min, presents an upward trend. Conversely, that under 15,000–18,000 r/min presents a downward trend. Since the bearing is preloaded under a constant pressure, the thermal deformation of the bearing makes the radial distance between the curvature center of the inner and outer ring of the bearing increase. In the process of bearing rotation at a medium and low speed, due to the bearing gyroscopic effect and centrifugal force, the heat generated by rolling and sliding friction is low, and the thermal displacement of the bearing is small. The contact angle of the outer ring presents an upward trend while it tends to be flat, and the effect of centrifugal force is greater than that of thermal displacement on the contact angle of the outer ring. At medium and high speeds of the bearing, the friction force increases, and the ball, inner ring, and outer ring expand with heat. The thermal displacement increases significantly, and the effect of thermal displacement on the outer ring contact angle is more obvious.
According to the relation between preload, rotation speed, and load of the inner and outer ring, Figure 14(a) shows that the bearing contact load increases with the increase in preload force. The external load reaches 104.35 N under the conditions of 18,000 r/min and a preload force of 500 N, which is 1.57 times that under the condition of 300 N. The external load is 14.15 N higher than the internal load. The increase in axial force of the bearing makes the position of the ball and outer ring raceway change, and the contact angle of the outer ring becomes larger. With the increase in rotating speed, the centrifugal force increases gradually and the load on the outer ring increases, while that on the inner ring decreases. The relationship between thermal displacement and load on the inner and outer ring of the bearing is shown in Figure 14(b), which also shows the load of the inner and outer ring, considering that the thermal displacement is higher than under the uncoupled condition. Under the conditions of a preload force of 400 N and speed of 18,000 r/min, the outer ring load is 96.13 N, which is 10.78 N higher than that under the uncoupled condition. As the bearing is affected by centrifugal force and gyroscopic torque, the displacement of the ball increases with the increase in friction force and heat generation. The contact angle between the ball and the inner and outer ring becomes smaller, and the contact load becomes larger. Comparing Figure 14(c) and (d), it can be seen that, under the same working conditions, the load on the outer ring is larger than that on the inner ring with the increase in rotating speed, and the effect of centrifugal force on the ball is the main factor affecting the contact of the load on the outer ring.

The relation between preload, rotation speed, and load of the inner and outer ring: (a) the relationship between preload and load, (b) the relationship between thermal displacement and load, (c) the relationship between preload force, rotation speed, and outer ring load, and (d) the relationship between preload force, rotation speed, and inner ring load.
The relationship between optimal preload force and bearing displacement
Bearing radial displacement is the main factor causing bearing unbalance in high-speed rotation, and bearing unbalance is directly related to bearing vibration. There is a complex coupling relationship between bearing preload, temperature, and displacement. According to the speed and temperature of the bearing, determining the bearing minimum radial displacement is an effective way to reduce the vibration of the bearing. According to the simulation of equations (8) and (15), the relationship between velocity and radial thermal displacement, under different preload conditions, is shown in Figure 15(a). Under the operating condition of 12,000 r/min, the relationship between radial displacement, without considering the thermal displacement and preload force, is shown in Figure 15(b).

The relationship between bearing displacement and preload: (a) the relationship between velocity and radial thermal displacement, under different preload conditions; and (b) the relationship between radial displacement, without considering the thermal displacement and preload force, under a condition of 12,000 r/min.
Figure 15(a) shows that with the increase in preload force and rotation speed, radial thermal displacement presents a nonlinear increasing relationship. Under the conditions of a high rotation speed and large preload, the maximum thermal displacement reaches 9.84 μm. Excessive bearing heat is the main reason for the rapid increase in bearing temperature rise and displacement. Figure 15(b) shows that at a constant speed of 12,000 r/min, the dynamic radial displacement of the bearing presents an inverse relationship with the preload force. With the increase in preload force, the downward trend of the dynamic radial displacement decreases. In an area of preload force greater than 460 N, an approximately stable state occurs, and the displacement is about 2 μm. The variation trend of the radial thermal displacement is generally consistent with that shown in Figure 8.
The minimum displacement of the bearing, corresponding to the optimal preload force, can be determined under different rotating speed conditions to effectively reduce the imbalance of the bearing vibration. The radial displacement of the bearing is the sum of the displacement, without considering the thermal deformation of the bearing and the thermal displacement, as shown in equation (22)

where δs is the total displacement of the bearing (μm), and δv and δt are the displacement without considering the thermal deformation and the thermal displacement of the bearing, respectively (μm).
The relationship between the optimal preload force and speed is shown in Figure 16. It can be seen that the bearing displacement is greatly affected by temperature. Under the condition of a preload force of 300–400 N, the temperature of the bearing is lower than that under a large preload force. Under the condition of a low preload force, the contact load of the inner and outer ring of the bearing is too small due to the small axial force. The radial displacement, without considering the thermal deformation of the bearing, is larger and has a greater influence on the total displacement than the radial thermal displacement. With the increase in preload force to 400 N, the bearing temperature presents an increasing trend. As the contact load between the ball and the inner and outer ring increases, the influence of the thermal displacement obviously increases. The total displacement of the bearing increases rapidly. Under three different working conditions of 12,000, 15,000, and 18,000 r/min, the optimal preload force at 12,000 r/min was 400 N, the minimum displacement was 6.5 μm, the optimal preload force at 15,000 r/min was 395 N, the optimal preload force at 18,000 r/min was 390 N, and the corresponding minimum displacement was 1.56 times that under the condition of 12,000 r/min. Under medium- and high-speed running conditions, the centrifugal force and friction force increase with the increase in speed. The bearing temperature increased significantly, and the bearing displacement, compared with that under the low-speed condition, increased significantly. In the running process of the bearing with a high rotating speed, reducing the preload force with a small amplitude can effectively reduce the bearing displacement and improve the bearing dynamic output characteristic ability.

The relationship between optimal preload force and speed.
The axial displacement of motorized spindle unit is one of the main factors of compensation preload. The compensation preload is calculated as shown in equation (23). The compensating preload is mainly affected by the preload of rotating shaft and bearing. The axial displacement of the motorized spindle is mainly composed of the rotating shaft and the bearings

where Fcp is the compensation preload (N), x is axial thermal displacement of the spindle unit (μm), and k is the coefficient of spring stiffness.
The relationship between compensated preload and velocity is shown in Figure 17. With the increase in rotating speed, the temperature of the spindle and the bearing increases. The axial thermal deformation of spindle unit is increasing, and the bearing outer ring squeezes the spring to provide a larger compensating preload. Under the conditions of 12,000, 15,000, and 18,000 r/min, the axial thermal deformation is 17.92, 26.40, and 35.38 μm, respectively, and it can provide a preload of 6.45, 9.50, and 12.74 N, respectively. The sum of the compensation preload and the preload provided by the bearing is 406.45, 404.5, and 402.74 N, respectively. Compared with the preload of 400 N provided by the spindle system, the simulation value calculates that the total preload is within the error of 2%.

The relationship between optimal preload force and speed.
Experimental verification and analysis
Temperature vibration test
Oil and gas lubrication were used for spindle-bearing lubrication under test conditions. The oil input was 5 mL/h, the pressure was 0.25 MPa, the cooling water temperature was 18°C, the cooling water flow rate was 10 L/min, the indoor temperature was 25°C, the bearing preload force was 400 N, and the medium and high speeds of the bearing were 6000–18,000 r/min, respectively, increasing by 1000 r/min each time.
Using the Lion SEA-5 motorized spindle error analyzer to measure the outer ring temperature of the spindle bearing, the Polytec OFV-505 non-contact laser vibration instrument measures the vibration of the spindle shaft end, according to Doppler effect. The HIOKI MR8875-30 data acquisition instrument was used to conduct a vibration test of the spindle dynamic field using a 170-30/15 ceramic spindle. The measurement of the vibration velocity and temperature of the ceramic motorized spindle is shown in Figure 18. The basic parameters of ceramic motorized spindle are shown in Table 3.
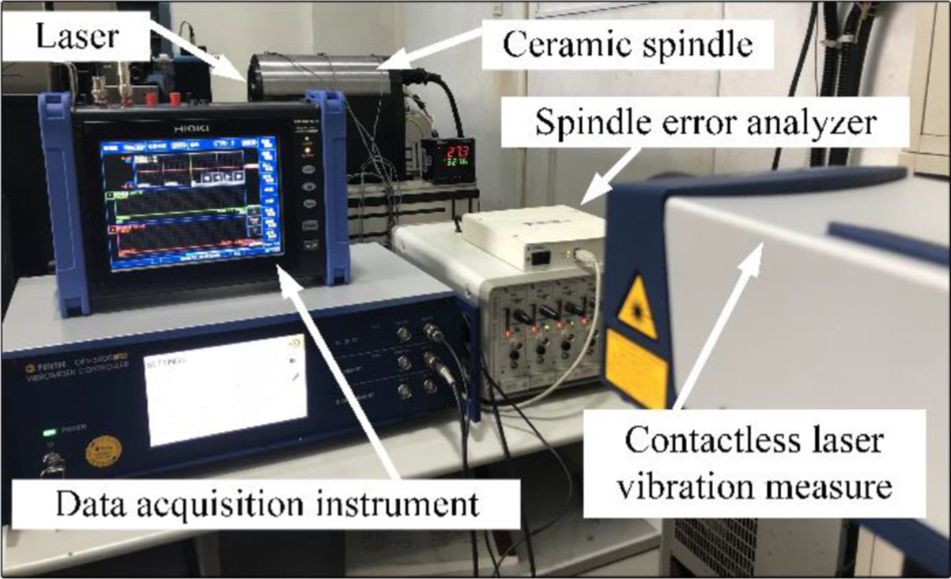
The measurement of the vibration velocity and temperature of the ceramic motorized spindle.
The basic parameters of spindle.

Experimental results and analysis
A temperature sensor is placed on the outer ring of the ceramic bearing in the motorized spindle. The temperature data on the outer ring of the bearing are measured and analyzed by the Lion SEA-5 motorized spindle error analyzer. Figure 19 shows a comparison of the simulation, with an experiment on the bearing outer ring temperature.

A comparison of the simulation with experiment on the bearing outer ring temperature: (a) the temperature of the outer ring of the bearing changes with time at 12,000 r/min and (b) a comparison diagram of the temperature at different speeds.
At the operating speed of 12,000 r/min, the temperature of the outer ring of the bearing changes with time, as shown in Figure 19(a). The outer ring temperature of the front bearing is higher than that of the rear bearing, which is consistent with the simulation trend. The outer ring temperature of the front bearing reaches a maximum value of 33.7°C in 20 min, which is higher than the simulation maximum value of 2.39°C, and the maximum error is 2.7%. The experimental temperature of the front bearing outer ring is slightly higher than the simulation temperature. The main reason is that the radial unbalanced magnetic tension, caused by the air gap eccentricity of the stator and rotor during the high-speed rotation of the motorized spindle, increases the friction between the ball and the inner and outer ring. The increase in bearing heat causes the temperature of the outer ring to rise. The maximum temperature of the rear bearing is 30.1°C, compared with the simulation error of 1.3%. A comparison diagram of the temperature at different speeds is shown in Figure 19(b). The relationship between the front and rear bearing rotating speeds presents an increasing trend. The experimental temperature of the front bearing is slightly higher than the simulation temperature. The maximum error between the simulation and experiment temperature of the front bearing is 1.2°C. The experiment is mainly affected by the motorized spindle current harmonic and air gap eccentricity. In the rear bearing experiment and simulation, the temperature accuracy is very high, and the maximum temperature difference is only 0.8°C. By comparing different speeds and times, the prediction model of the bearing temperature gained a high accuracy.
Ceramic bearings and ceramic motorized spindle rotating shaft adopt an interference fit mode. The shaft vibration of a spindle can reflect the dynamic characteristics of the inner ring of ceramic bearings. The vibration frequency domain of the ceramic motorized spindle shaft at 12,000 r/min is shown in Figure 20. According to equations (20) and (21), the vibration frequency domain of the ceramic bearing is obtained by simulation. From Figure 20(a), under the 12,000 r/min working condition, the fast Fourier transform (FFT) transformation shows that the one-time frequency is 196.6 Hz, and the amplitude is 7.53 mm/s. The two-time frequency is 393.2 Hz, and the amplitude is 0.398 mm/s. The three-time frequency is 596.48 Hz, and the amplitude is 0.708 mm/s. The one-time frequency amplitude of the bearing vibration signal in the low-frequency region is much larger than that in the high-frequency region. In the two-time frequency amplitude, it can be seen that the radial force of the bearing is small. The three-time frequency amplitude can cause an imbalance of the bearing. An analysis of Figure 20(b) shows that the amplitude of the one-time frequency is larger than the simulation amplitude. The frequency is 3.3% higher than the simulation frequency. The small amplitude frequency near the three-time frequency indicates that the harmonic influence of the ceramic is small due to the reverse magnetic characteristics. From Figure 20(a) and (b), it can be seen that, compared with the simulation frequency domain, the frequency domain near the two-time experiment frequency fluctuates greatly. In the process of the high-speed rotation of ceramic bearings, the unbalanced radial magnetic pull, caused by rotor eccentricity, affects the vibration characteristics of the rotating shaft. According to the experimental data, it can be seen that the frequency time response characteristic of the ceramic bearing is obvious, and it has good dynamic characteristics and a stable reliability.

The vibration frequency domain of the ceramic motorized spindle shaft at 12,000 r/min: (a) frequency domain of the simulation vibration and (b) frequency domain of the experimental vibration.
The time-domain comparison of the ceramic motorized spindle vibration velocity at different rotating speeds is shown in Figure 21. It can be seen that the vibration speed of the shaft of the ceramic motorized spindle presents an upward trend with rotating speed. This indicates that with the increase in velocity, the centrifugal force of the bearing and Hertz contact force have an obvious effect, which causes the change of the vibration characteristics of the motorized spindle. In the uncoupled state, the vibration is smaller than the vibration amplitude of the experiment, which causes a large error. With the increase in velocity, the error value presents an increasing trend, and the maximum error at 18,000 r/min is 2.82 mm/s. Considering the thermal displacement, the simulated vibration velocity reaches 18.78 mm/s at 18,000 r/min. The vibration velocity of the experiment is 18.92 mm/s. The average error of the simulation and experiment is 2.8%. The vibration velocity of the simulation and experiment has a good consistency. The thermal displacement is the main reason for the increase in radial vibration.

The time-domain comparison of the ceramic motorized spindle vibration velocity at different rotating speeds.
Conclusion
In this article, the influence of ceramic angular contact ball bearing deformation on the dynamic characteristics of a high-speed ceramic motorized spindle is studied. The heat transfer mechanism was applied to obtain the ball, inner ring, and outer ring temperature of the bearing. The empirical equations of Harris and Palmgren were used to calculate the bearing heat generation and thermal deformation. Using the Hertz contact theory, a dynamic thermal coupling model of a ceramic spindle and bearing system is established. The effect of preload on bearing displacement, contact angle, contact load, and vibration at different temperatures and speeds is studied. The following conclusions are drawn:
The establishment of a motorized spindle heat transfer model is based on the Harris and Palmgren empirical equation. The influence of temperature of each bearing part, under different rotating speeds and preload conditions, is studied. With the increase in bearing speed, the centrifugal force, friction force, and contact load increase. There is a nonlinear increasing relationship between the bearing temperature and rotating speed. The ball temperature of the bearing is successively higher than that of the inner ring and the outer ring. Through the motorized spindle ceramic bearing temperature experiment verification, the maximum error between thermal model and temperature of the motorized spindle-bearing system is only 2.7%. The bearing thermal model has a high accuracy.
Under the condition of medium- to high-speed rotation of the bearing, as the speed increases, the centrifugal force and friction torque of the bearing increase. The bearing temperature is high, and the radial thermal deformation has an obvious upward trend. A small amplitude reduction of the preload force can effectively inhibit the increase in bearing displacement and improve the dynamic output capacity of the bearing.
In the case of thermal displacement coupling, the experimental vibration velocity is verified under different rotating speed conditions. The dynamic and thermal coupling model of the motorized spindle and bearing system was simulated and tested, with an error of 2.8%. The error of the model simulation results is small, and the error of the uncoupled bearing model and experiment is 11.1%, which indicates that the thermal deformation of the bearing is a non-negligible factor affecting the vibration.
Footnotes
Appendix 1
Handling Editor: Michal Kuciej
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant numbers 51675353, 51705341, and 51905357), the innovation team project about the Ministry of Education of China (Grant number IRT-15R45), the Programme of Introducing Talents of Discipline to Universities (Grant number D18017).