
Abstract
The joint surfaces have a significant effect on the behavior of mechanical structures. Strong demand exists for the development of a model that can include the contact characteristics of joint surfaces. In this article, a new contact model considering asperity interaction and surface waviness is proposed. The roughness and waviness of the surface are separated by the Fourier series, and a contact model for an asperity is first established to obtain the displacement caused by asperity interaction. The joint surface is then treated as the contact between a rough surface and a smooth waviness to obtain a new model which considers asperity interaction and surface waviness. Simulation results show that when the normal load is fixed, the contact deformation decreases with the increasing radius of the waviness peak, but increases with the increasing surface roughness. In addition, asperity interaction will lead to a lower contact stiffness and a larger real contact area. Compared with other models, the results obtained from the proposed model are closer to the experimental results.
Introduction
Computer numerical control (CNC) machine tools are universal machinery in the industry, composed of many different mechanical parts, components, and joint surfaces. 1 The joint surfaces in the CNC machines not only play a crucial role in transmitting load and energy during the operation of the machine tool, but also generate complicated dynamic characteristics in the process. Therefore, a high demand exists for the development of a joint contact model that involves the contact characteristics of joint surfaces for predicting the overall performance of CNC machine tools.
All engineering surfaces are rough at some length scale, and therefore the mechanical joint surface can be in general equivalent to the contact of two rough surfaces. Extensive research has been conducted all over the world on the contact behavior between rough surfaces and many different contact models were proposed. Early in 1966, Greenwood and Williamson 2 considered that the height distribution of asperities on the rough surface can be approximated as a Gaussian distribution and proposed an elastic contact model based on six basic assumptions (the GW (Greenwood–Williamson) model), thus providing a solid foundation for studying rough surfaces. However, more recent studies have shown that the GW model can lead to significant inefficiency in the simulation of contact behavior for many rough surfaces, in particular in studying miniature-scale mechanics. Thus, in later studies on the contact mechanism of the rough surfaces, the assumption that the asperity only undergoes elastic deformation is removed. For example, Chang et al. 3 established a model (CEB (Chang, Etsion, and Bogy) model) based on the conservation principle and studied the elastic and plastic deformation of asperities. The drawbacks of the CEB model are that it ignored the elastoplastic deformation of asperities and the contact load changed abruptly at the critical yield point. Later, Zhao et al. 4 divided the deformation of asperities into three stages: elastic, elastoplastic, and fully plastic, and proposed an elastic–plastic microcontact model (ZMC (Zhao–Maietta–Chang) model) to model the transition from elastic deformation to fully plastic flow and to make up the defects of the CEB model. In another effort, Kogut and Etsion5,6 further improved the CEB model mentioned previously and proposed the elastic–plastic model (KE (Kogut and Etsion) model), which includes provision for the elastic, elastoplastic, and fully plastic contact behavior of the asperity based on finite element analysis. More recently, Beheshti and Khonsari 7 predicted dry rough line-contact characteristics by employing different statistical microcontact models including GW, CEB, ZMC, and KE and providing a comparison study among them. The result shows that the use of elastic–plastic microcontact models predicts a lower maximum normal pressure and greater contact width and real contact area compared to the GW model. Li et al. 8 proposed a new contact model to more accurately analyze the contact characteristics of rough surfaces by taking surface tension into account. In addition, the fractal theory has also been widely adopted to describe the rough surface and perform contact modeling of rough surfaces. Majumdar and Bhushan 9 presented a fractal contact model for joint surfaces (MB (Majumdar and Bhushan) model) by assuming that the contact surface consists of a rigid plane and a flexible fractal surface. Goedecke et al. 10 established a fractal model connected to a rough surface based on a three-dimensional (3D) surface fractal function. Xiao et al. 11 proposed a new elastoplastic asperity contact model based on the contact mechanics combining with the continuity and smoothness of mean contact pressure and contact load; this model overcomes the shortcoming of discontinuity in stiffness obtained from the ZMC model. Jana et al. 12 generated a fractal surface in MATLAB using roughness parameters and imported it into ANSYS. The finite element model of the contact between a rough surface and a rigid plane was constructed in ANSYS and its contact characteristics were studied. In fact, the combination of experiment and theory is more convincing. Thus, Shi and colleagues13,14 derived a model for the sliding between a rigid plane and an elastoplastic spheroid, for which the simulation results agreed well with the experimental results. The model can explain the characteristics of tangential force, normal load, and contact area with the tangential force loading process. Kucharski and Starzynski 15 investigated experimentally and numerically the contact between a rough surface and a rigid flat plane. Pepelyshev et al. 16 studied the adhesive contact between soft materials and rough surfaces through experiments, statistical analysis, and modeling.
It can be seen from the previous studies that the influence of asperity interaction is generally ignored in the rough contact model. However, the contact of one asperity caused deformation around it such that the adjacent asperities were shifted. Chandrasekhar et al. 17 carried out a finite element method to simulate the surface contact process and found that asperity interaction has an effect on the contact characteristics of the joint surface. Wang et al. 18 proposed a fractal contact stiffness model with the interaction between asperities and analyzed the effects of asperity interaction on the contact stiffness. Jourani 19 proposed a 3D deterministic model by considering different deformation processes of the asperity and the asperity interaction, and further analyzed the influence of asperity interactions on the static friction coefficient using this model. Saha and Jackson 20 researched the behavior of the elastic and elastic–perfectly plastic sinusoidal surfaces in contact with a rigid flat. The asperity interaction and the effect of the substrate below the asperity have been considered in this model.
The aforementioned studies provided a theoretical basis for the study of joint surfaces. However, most of the studies only analyzed the influence of surface roughness on joint surfaces without considering the impact of surface waviness. Halminen et al. 21 established a model that considers the waviness of bearing surfaces. This model studied the influences of surface waviness and friction on the contact characteristics of the bearing inner and outer rings. Chen et al. 22 searched the relationship between the spindle unbalance and waviness phenomenon for the problem of workpiece waviness. Gusev and Fomin 23 measured the 3D surface topography of the milling cutter surface via a surface profiler. As a result of statistical processing of the obtained experimental data, it was found that the waviness of the treated surface links with elements of the profile milling mode and design parameters of the shaping cutting tool. Chen et al. 24 developed a finite element model that can be employed to analyze the influences of stochastic tow waviness on stiffness and strength of plain-weave ceramic matrix composites.
Motivated by this demand, in this article, a contact model with surface waviness and asperity interaction is proposed based on elastic theory. The influences of surface waviness, roughness, and asperity interaction on the contact behaviors of joint surfaces were researched by analyzing the relationship between normal load and deformation.
Characterizing the topography of joint surfaces
Criteria for dividing roughness and waviness components
The morphology of mechanical surfaces can be divided into surface roughness and surface waviness. Surface roughness refers to the surfaces with small pitches, tiny peaks, and valleys, in which the distance between two peaks or two troughs is small (less than 1 mm). Surface waviness is an intermediate geometry with significant periodic fluctuations in the surface morphology of parts. It can cause vibration and noise during the operation of the machine. The research on the surface morphology of joint surfaces usually assumes the surface morphology as a rough surface with height ascribed to Gaussian distribution, ignoring the influence of surface waviness. As this does not match the actual surface morphology, a method is proposed to divide the surface topography of parts into the roughness component and the waviness component as shown in Figure 1. Upon this basis, we will analyze the influences of surface waviness and surface roughness on the contact characteristics of joint surfaces.

Joint surface morphology and its components.
The contact characteristics of joint surfaces are affected not only by the morphology of individual surfaces, but also by the combined topography of two contact surfaces.25,26 We calculate the combined topography of a joint surface by summing the individual surface profiles

where zu(i) and zl(i) represent the height coordinate of the upper surface and the lower surface, respectively, and z(i) represents the height coordinate of the combined topography.
To study the waviness and roughness components in joint surface topography, the two components must be separated. When the surface topography of a joint contains the deterministic periodic waviness component, the height coordinate z(i) of the combined topography can be expressed by the following Fourier series 27

where εr(i) represents a roughness component; m and i are natural numbers; a1, am, and bm are the coefficients of Fourier series; N is the total number of sampled data points;
When there is only one periodic waviness component m = n in the combined topography of a joint surface, n represents the periodic curve at the maximum radius of the waviness peak, and equation (2) can be expressed as 27

Furthermore, equation (3) can be simplified as 27

where cn represents the amplitude of the cosine function given by
Topographic features of roughness components
The waviness and roughness of the combined topography have been separated in section “Criteria for dividing roughness and waviness components.” Now, the roughness component is first determined and then the calculation method of the waviness component is discussed. The surface morphology of a joint surface has a fractal characteristic based on the study of Majumdar and Bhushan 9 In order to obtain the unique surface parameters including areal density of asperities (η), average radius of curvature (β), and the standard deviation of asperity heights (σ), the roughness component mentioned in section “Criteria for dividing roughness and waviness components” is treated as a time series using the structure function method. The time series with fractal features can make the structure function of the sampled data satisfy the condition

where D represents the fractal dimension, G represents the fractal roughness coefficient, τ is the minimum sampling interval, ψ is a dimensionless value,
Taking logarithm on both sides, equation (5) can be simplified to

where

After that, the mechanical surface can be characterized by the zero-, second-, and fourth-order moments of the power spectral function. They can be expressed as 28



where m0, m2, and m4 represent the zero-, second-, and fourth-order moments, respectively; Φ(ω) represents the power spectral function, ωh and ωl are the upper and lower limits of the spectral bandwidth, respectively, given by ωl = 1/L and ωh = 1/τ; and L is the sampling length.
Thus, the topography parameters η, β, and σ of a joint surface can be obtained according to equations (11)–(13), respectively 29



where α is a dimensionless value,
Waviness component
The waviness shapes can be assumed to be wavy, planar, and stepped, respectively. Planar waviness is considered as a smooth plane, wavy waviness is characterized by a harmonic wave, and stepped waviness can be characterized by an isosceles trapezoid. For simplicity, we use harmonic functions to analyze the effects of the waviness parameters. Therefore, we assume that the height distribution of the waviness is as follows 27

where A represents the amplitude of a harmonic cosine waviness, which is the same as cn in equation (4), and fw represents the frequency of the cosine function.
We can find that the harmonic wave can be considered as a plurality of waviness peaks with the same curvature radius. 27 The radius of curvature of the waviness peak can be expressed as

Normally, 2πfwx approaches zero near the contact region, so equation (15) can be simplified as 27

Contact model of joint surfaces
Contact model for asperity
In section “Characterizing the topography of joint surfaces,” the surface waviness and roughness of combined topography are separated by the Fourier function and calculated, respectively. In order to investigate the influence of asperity interaction on the contact characteristics of the joint surface, a model of a single asperity needs to be established first, and then the displacement caused by asperity interaction is obtained. The contact of joint surfaces in the GW model 2 is equivalent to that between a rigid smooth plane and an equivalent elastic rough surface, in which asperity interaction is negligible. In fact, when the normal load is applied to the local contact area, the asperity interaction will change the mean height plane of asperities, as shown in Figure 2.
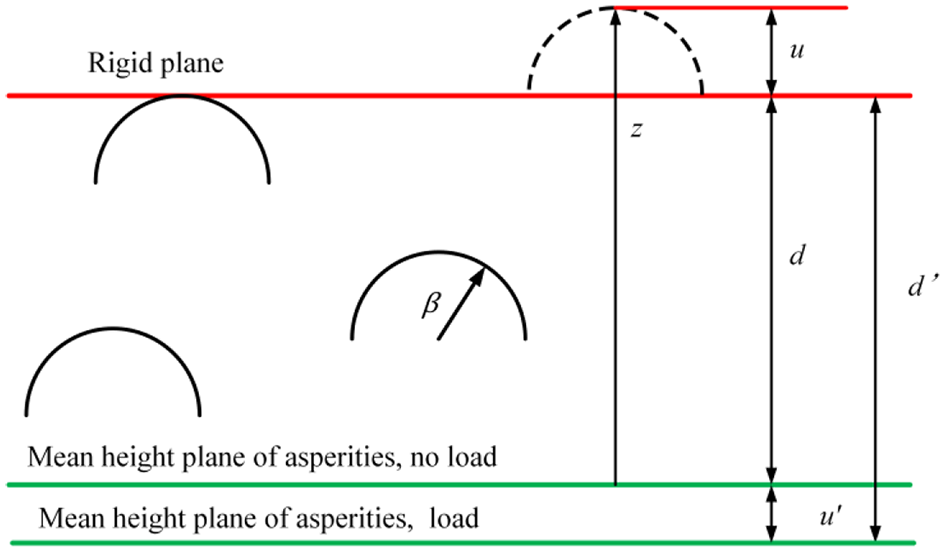
Schematic diagram of contact between smooth rigid plane and rough surface.
Taking the circle with radius a of the contact area as an example, the displacement of point M under uniform load is calculated, as shown in Figure 3. First, a tiny unit in the contact area is taken, and then the load of qsdψds is applied in the tiny unit. Therefore, the displacement of point M can be expressed as


The displacement of point M under uniform load.
If the length of the chord mn is 2acosθ, ψ = [0, 2π], then equation (17) can be expressed as

Letting asinθ = rsinψ, we obtain

Substituting r = 0 into equation (19), the maximum displacement can be obtained

Similarly, the average displacement can be determined by Timoshenko and Goodier 30

where m is the value related to the shape of the contact area, m = 1, A is the load area, and p is the contact pressure.
In this article, the displacement caused by asperity interaction is replaced by the idea of using average displacement, 31 and it can be concluded that the real deformation of asperities is

New contact model with surface waviness
As shown in Figure 4, the joint surface is treated as the contact between a rough surface and a smooth waviness. The following assumptions are used in this model: (1) Only the contact between the rough surface and a single waviness peak is considered when studying the joint surface with periodic waviness. If there are N1 waviness peaks in the nominal contact area, the load on each peak is split to be P = F1/N1 when compressed by normal load F1. (2) Both the waviness and roughness are isotropic. The waviness peaks are spheres with a curvature radius R at the contact region. (3) The deformations of asperities and waviness peaks follow elastic theory and are not affected by the frictional forces. (4) The asperity heights follow the Gaussian distribution function f(z). A circular contact area of radius a is formed under a normal load P. Then, the contact deformation of joint surfaces δn can be expressed as

where r represents the vertical distance from any point of the contact area to the center of the contact circle and u(r) and ω(r) are the deformations of asperities and the waviness peak, respectively.

The contact between waviness and a rough surface.
There is no contact between the waviness peak and the rough surface at r ≥ a, and thus the deformation of joint surfaces is written as

Combining equations (23) and (24), we can get the deformation of asperities

Based on the elastic theory, the deformation of the waviness peak is calculated as

where q(r) represents the pressure distribution of the contact region and E′ is the equivalent elastic modulus, E′ = E/[2(1 – v2)].
According to the deformation of joint surfaces, the pressure distribution curve of the contact region is assumed as 27

If the contact pressure in the contact area center is assumed as q0, the contact pressure distribution can be expressed as
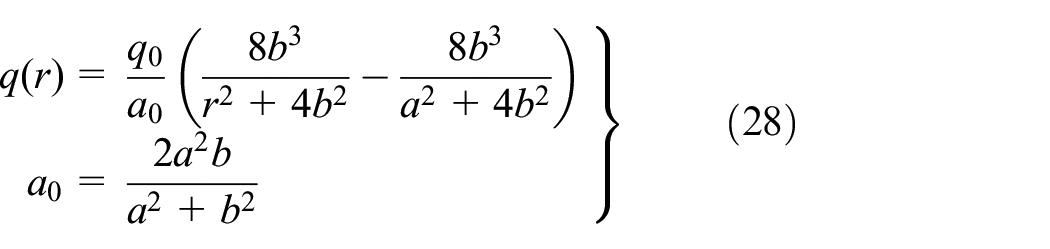
The applied load P is equal to the sum of pressures on the contact surface according to the force equilibrium conditions, and thus we obtain

Letting

Combining equations (28) and (30), the contact pressure distribution function can be written as

Substituting equation (31) into equation (26), the deformation of the waviness peak can be simplified to

From the GW model, the pressure distribution can also be written as 27

where η represents the areal density of asperities.
From section “Contact model for asperity,” the deformation of asperities can be expressed as

Then the contact pressure distribution obtained by considering the interaction between asperities is

We assumed that the contact pressure between the asperities and the waviness peak satisfies the equilibrium condition at a particular point, and thus we obtain

Given the initial values for a and b, q1(r) and q3(r) are obtained from equations (25), (31), (32), and (35), respectively. Finally, equation (36) can be solved by the Gauss–Seidel iteration method.
Results and discussion
Verification of the contact model
In this section, analytical simulations of joint surfaces were performed, and the results were compared to those obtained from the GW model 2 and experimental measurements for verification. The input surface parameters were used directly from Lee et al. 32 including areal density of asperities η = 25.19 μm–2, equivalent elastic modulus E′ = 390 GPa, average radius of asperity curvature β = 0.66 μm, and the standard deviation of asperity heights σ = 3.43 nm. In the study by Lee et al., 32 the samples were subjected to a stamping test using a nanoindentation instrument. The contact area between the indenter and the sample is large enough to be approximated as the contact of the joint surface. The instrument has a three-plate capacitive load–displacement transducer with a practical force resolution of 100 nN and a displacement resolution of 0.2 nm. Figure 5 shows the results obtained from our new contact model, the GW model, and the experimental data, in which the slope of the curves is the contact stiffness of joint surfaces. It can be seen from Figure 5 that as the normal load increases, both the theoretical model and the test contact stiffness increase. The results from the GW model have a significant deviation from the experimental measurements, while those from the proposed model more closely agree with the experimental data. This result demonstrates that the results of the proposed model are better than those of the GW model, that is, the proposed model further captures the behavior of the actual engineering.

Comparison between theoretical and experimental models of the joint surfaces.
It is noted that although the proposed model gives better results than the GW model, the yielded values remain higher than the experimental measurements. This issue stems from the limitations of assumption in the new model, with one example being the adherence of the deformations of asperities to elastic theory. In fact, the deformation process of asperities is composed of three stages of elastic, elastoplastic, and complete plastic, leading to a lower prediction for the contact stiffness. Research on elastoplastic deformation and complete plastic deformation of asperities will be carried out in the future work.
Samples and their surface topography parameters
The material of the sample (Figure 6) is 20CrMo and its surface is machined by milling. The surface topography of the samples is measured using a Talysurf surface profiler with a scan size of 20 mm × 20 mm. The minimum sampling interval of the surface profiler is 0.25 μm, and the sampling length is 3 mm. We use the arithmetical mean deviation (Ra) of the rough surface profile to characterize surface roughness based on ISO 468. The roughness values of the samples are 0.3995, 2.0354, and 6.5296 μm, respectively. The red lines (1, 2, 3) in Figure 6 represent the sampling trajectory of the surface profile.

Specimen and measuring position.
Figure 7 presents the structural function of three rough surfaces. As shown in Figure 7(a), three sets of surface profile data are measured on a rough surface Ra = 0.3995 μm and three sets of structure functions can be obtained by substituting the measured profile data into equation (5). The slope (k) and intercept (C1) of the fitted curves of each structure function can be used to calculate the fractal parameters (D1, D2, D3, G1, G2, G3) by equation (7). Then, the fractal parameters (D, G) of the rough surface Ra = 0.3995 μm can be obtained by averaging the three sets of fractal parameters solved above, that is, D=(D1+D2+D3)/3=1.4216 and G=(G1+G2+G3)/3=2.1062×10–6 mm. Similarly, from Figure 7(b) and (c), we can obtain fractal parameters for the other two surfaces, respectively. When Ra = 2.0354 μm, we obtain D=1.2551 and G=1.4360×10–7 mm. When Ra=6.5296 μm, we get D = 1.1747 and G = 1.2322 × 10–8 mm. Finally, the rough surface parameters are obtained and shown in the following two tables. Table 1 shows the fractal parameters for different rough surfaces. Table 2 shows spectral moments (m0, m2, m4) and surface topography parameters (η, β, σ) for three surfaces.
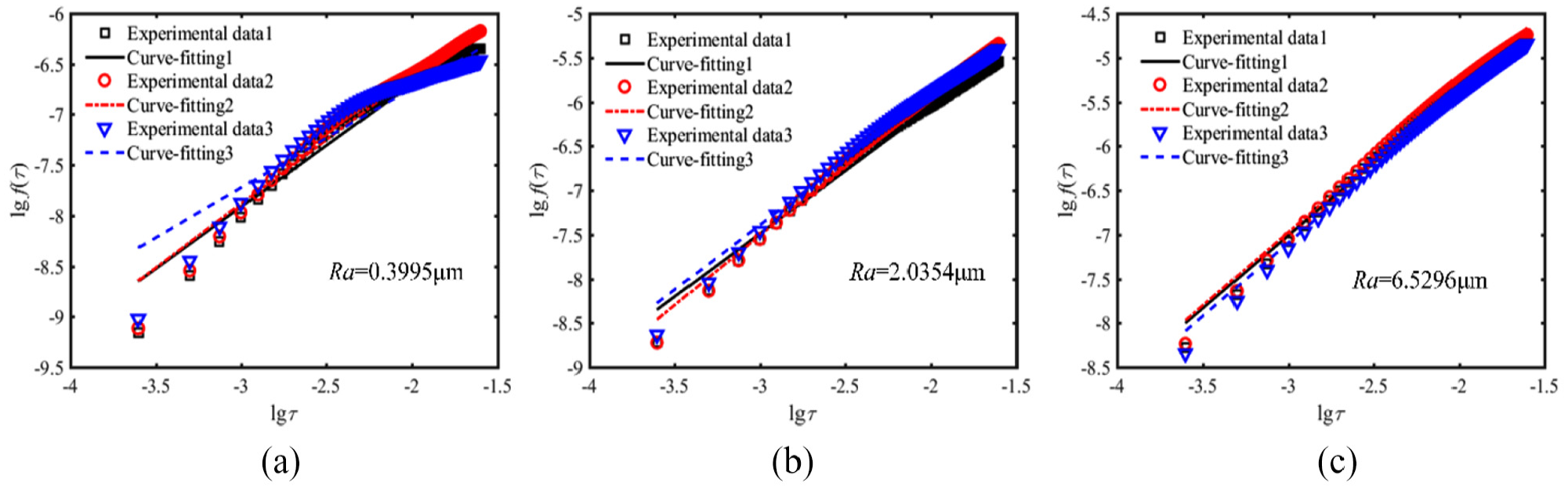
Structure functions of three sample with different roughness values: (a) Ra=0.3995μm, (b) Ra=2.0354μm, and (c) Ra=6.5296μm.
Fractal parameter values for different surface roughness values.

Spectral moments and surface topography parameters.

Effects of waviness
To obtain the influence of the waviness peaks on rough surfaces, simulations were performed using E = 212 GPa and v = 0.278 simulating the contact of 20CrMo (see Table 2). Three different radii of waviness peak of R = 100 μm, R = 200 μm, and R = 300 μm were used to investigate the waviness effects on the contact of joint surfaces. Figure 8 shows the relationship between the contact deformation and the normal load for different waviness peaks with different curvature radii. Note that the relationship between the normal load and the contact deformation of joint surfaces is nonlinear, and the larger the normal load applied, the greater the contact deformation will be. As shown in Figure 8(a), when the normal load is constant and the contact deformation is less than 0.075 μm, the influence of the radius of the waviness peak on the contact deformation is negligible. The contact deformation of the joint surfaces decreases with increasing radius of the waviness peak when the normal load is constant and the contact deformation is larger than 0.075 μm. This is because, in the early stage of contact, fewer asperities are in contact and the radius of the waviness peak has little effect on the contact area. As the load increases, more asperities come into contact. A larger radius of the waviness peak will lead to a smaller waviness amplitude, thus resulting in a larger contact stiffness of the joint surface. Figure 8(b) and (c) shows similar rules to Figure 8(a), but the difference is that the effect of the waviness peak radius can be ignored when the asperity deformation is less than 0.15 μm in Figure 8(b) and when the asperity deformation is less than 0.2 μm in Figure 8(c).

The normal load-deformation curves for different roughness values: (a) Ra=0.3995μm, (b) Ra=2.0354μm, and (c) Ra=6.5296μm.
Figure 9 describes the relationship between the real contact area and the contact deformation of the joint surface with different curvature radii of waviness peak. The input parameters are shown in Table 2. It is confirmed that the real contact area is approximately linearly related to the contact deformation, and a larger contact deformation will lead to a larger contact area. When the contact deformation is constant, the real contact area increases with the increasing radius of waviness peak. It is obvious that the real contact area of the joint surface with roughness Ra = 6.5296 μm is the smallest, while that of the joint surface with roughness Ra = 0.3995 μm is the largest. This phenomenon is attributed to the fact that the number of asperities in the contact area decreases with the increase in surface roughness, resulting in a decrease in the contact area of the joint surface.

The real contact area-deformation curves for different roughness values: (a) Ra=0.3995μm, (b) Ra=2.0354μm, and (c) Ra=6.5296μm.
Effects of roughness
The effect of surface roughness on the contact characteristics of the joint surface is illustrated in Figure 10. The relationship between the contact load and deformation of three samples with different roughness values are taken as R = 100 μm, R = 200 μm, and R = 300 μm, respectively. The slope of the curve represents the stiffness of joint surfaces. As shown in Figure 10(a), it is obvious that the joint surface with roughness Ra = 6.5296 μm has the smallest contact stiffness, while the joint surface with roughness Ra = 0.3995 μm has the largest contact stiffness. Similarly, Figure 10(b) and (c) shows the load–deformation curves at R = 200 μm and R = 300 μm, respectively. It is noted that the contact deformation decreases with the increasing radius of the waviness peak. This is mainly because a rougher surface has larger asperity geometrical size and a smaller number of asperities per unit area. When the radius of the waviness peak is constant, the real contact area depends on the number of asperities in contact with the waviness peak. Obviously, a smoother surface will have a larger real contact area at the interface and thus a greater contact stiffness of the joint surface. Therefore, in engineering practice, if the radius of the waviness peak cannot be changed, an alternative method is to increase surface contact stiffness by reducing surface roughness.

The normal load-deformation curves for different curvature radii of waviness peak: (a) R=100μm, (b) R=200μm, and (c) R=300μm.
Effects of asperity interaction
The essence of the dynamic characteristics of joint surfaces is the interaction and mutual restriction of asperities, and thus the interaction between asperities must be studied. In this article, the deformation interaction between asperities is characterized by the average displacement (the deformation caused by a uniform load) in equation (22). Figure 11 illustrates the relationship between the normal load and the deformation obtained from different models. The slope of the curves denotes the contact stiffness of the joint surface. The curves in the figures are calculated by the proposed model (considering asperity interaction) and the model without considering asperity interaction. In this section, the model without considering asperity interaction is referred to as “w/o interaction” in the subsequent analysis. In Figure 11(a), the model “w/o interaction” predicts the larger contact stiffness, while the proposed model gives the smaller contact stiffness when the normal load is fixed. This is mainly because the influence of asperity interaction is ignored in the model “w/o interaction.” In the new contact model, the real deformation of the asperity includes the normal deformation minus the deformation caused by asperity interaction, while in the model “w/o interaction” the true deformation of the asperity is equal to the normal deformation. This leads to the stiffness of the joint surface being overestimated when we ignore asperity interaction. Figure 11(b) and (c) shows the normal load–deformation curves with roughness being changed from 2.0354 to 6.5296 μm. These results have a similar pattern. The reason is that the deformation interaction between asperities is characterized by the average displacement under normal pressure as explained earlier.
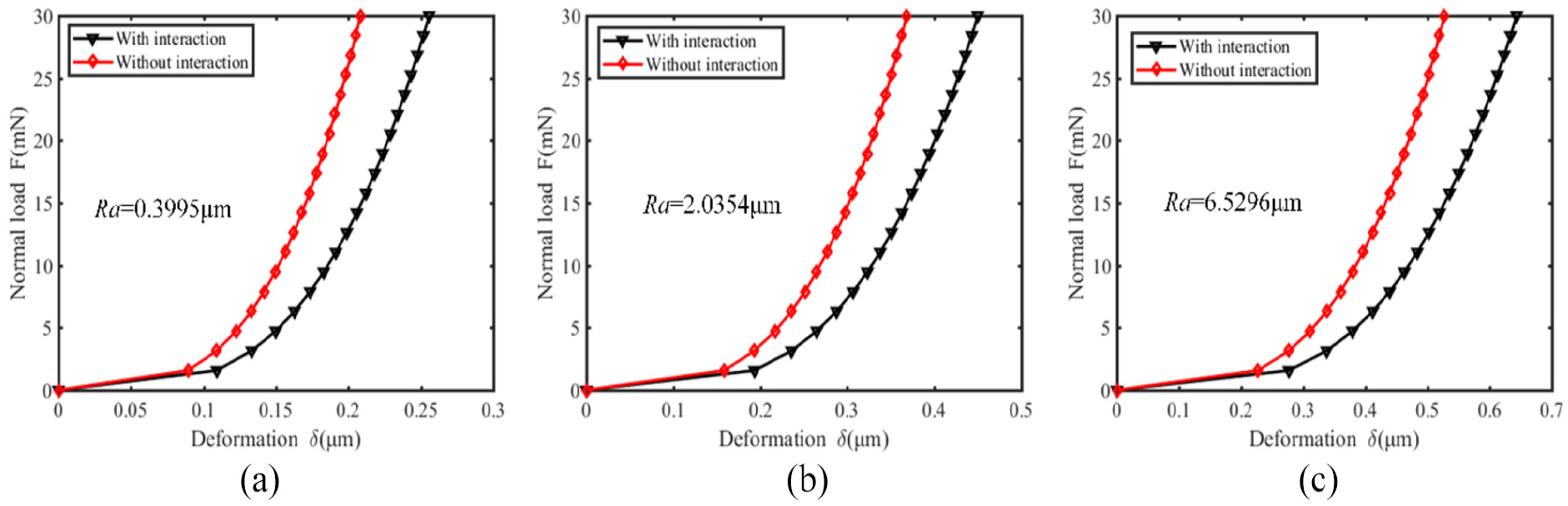
Effect of asperity interaction on normal load for different roughness values: (a) Ra=0.3995μm, (b) Ra=2.0354μm, and (c) Ra=6.5296μm.
Figure 12 depicts the effects of asperity interaction on the real contact area of joint surfaces; the real contact area is calculated by the area of the circular contact area. As shown in Figure 12(a) and (b), the relationship between the contact deformation and the real contact area of joint surfaces can be approximated as linear. The asperity interaction has little effect on the contact deformation when the surface roughness is changed from Ra = 6.5296 μm to Ra = 2.0354 μm. However, as shown in Figure 12(c), the real contact area with asperity interaction is larger than that without asperity interaction when the surface roughness is 0.3995 μm. The reason for this is that the smoother the surface, the larger the contact stiffness of joint surfaces, while asperity interaction greatly affects the deformation of joint surfaces, resulting in an increase in the real contact area.

Effect of asperity interaction on the real contact area for different roughness values: (a) Ra=6.5296μm, (b) Ra=2.0354μm, and (c) Ra=0.3995μm.
Conclusion
In this work, a contact model for the rough surfaces of a joint with surface waviness and asperity interaction was proposed to study their contact characteristics. On one hand, the surface waviness and the roughness of combined topography are separated by the Fourier function and calculated, respectively. On the other hand, the displacement of the mean of the asperity heights caused by asperity interaction is replaced by the average displacement calculated under a uniform load. Then, an elastic joint model considering the surface waviness and the asperity interaction is established based on the elastic theory. Numerical results show that the prediction results of the model proposed are closer to the experimental measurement results than some other old results. It can be found that the contact deformation decreases with the increasing radius of the waviness peak, but increases with the increasing surface roughness when the normal load is fixed. In addition, asperity interaction will lead to a lower contact stiffness and a larger real contact area. It is concluded that the surface contact stiffness of joints may be improved by changing either the surface roughness or the radius of the waviness peak. It is important to note that the proposed model based on elastic theory is limited to the analysis of the joint surface in the elastic deformation regime and the plastic interaction outside the asperities is not considered.
Footnotes
Acknowledgements
The authors are grateful to other participants of the project for their cooperation.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No. 51975449) and Scientific Research Program funded by Shaanxi Provincial Education Department Program (No. 2018JM5066).