
Abstract
With the rapid growth of the elderly population in China, the proportion of middle-aged and elderly pedestrians crossing streets at signalized intersections has been increasing gradually, mandating the consideration of the crossing characteristics and travel safety of the elderly in signal matching. This article proposes a new signal control parameter optimization method for intersections based on an improved genetic algorithm. According to the crossing characteristics and travel safety of the elderly, the average vehicle delay is used as the control objective, and the green signal ratio and cycle time are used as control variables. The improved genetic algorithm with an improved fitness calibration method and an adaptive cross-mutation function is used to solve the signal control model. Based on the optimization analysis of traffic signal control parameters at a traffic intersection, the study shows that the improved signal control method can effectively reduce the average vehicle delay compared to the Webster algorithm and the traditional genetic algorithm.
Introduction
China’s elderly population is growing rapidly. According to statistics, there were 220 million elderly people over 60 years old in China in 2016, accounting for 16.1% of the total population. 1 With the rapid development of China’s economy, the frequency of car ownership is increasing rapidly, increasing traffic congestion in cities and thus lowering people’s living standards. Traffic signal control is the primary method of urban traffic management, which plays an important role in improving traffic order, improving road traffic safety level, and reducing traffic congestion. Traditional signal control is based on a preset timing scheme for intersection control and does not consider real-time information; thus, this type of control cannot adapt to changes in traffic flow. With the rapid development and improvement of intelligent optimization algorithms, new opportunities and methods to solve signal control problems at the intersection have recently become available.
Previous studies investigated signal control parameter optimization at intersections using intelligent optimization algorithms. Pappis and Mamdani 2 used a fuzzy control method to control a two-phase, one-way intersection. Compared with induction control, the average vehicle delay at an intersection decreased by approximately 20%. 2 Trabia et al., 3 Niittymaki, 4 and Murat and Gedizlioglu 5 used a fuzzy control method with a genetic algorithm (GA), neural networks, and other intelligent methods to study signal control, reducing the average vehicle delay by 20%–50% compared to traditional timing control. Srinivasan et al. 6 studied the application of neural networks in real-time traffic signal control. Chen and Huang 7 established a model of intersection optimization, in which the phase green time and signal period were the control variables, the minimum vehicle delay was the objective function, and the proposed solution was based on GAs. Xie et al. 8 considered multiple phases in the same direction as a larger phase, established a fuzzy controller, and optimized a membership function using a GA. The results of that study showed that the control effect improved when the traffic volume changed markedly and quickly. 8 Wang and Wang 9 used the total delay time obtained from microscopic traffic simulations as an evaluation index and proposed particle swarm optimization based on the traffic signal off-line timing optimization method. Ma and Yang 10 proposed a multi-objective optimization model based on single intersection bus passive priority control, and a second-generation nondominated sorting GA was used to solve the multi-objective optimization model. The bus passive priority control model showed good performance, reducing bus and social vehicle traffic delays. 10 Yang et al. 11 proposed a model and optimization method of urban traffic signals based on the golden section point GA, and the test results showed that the proposed intersection signal timing model had a good control effect. Silva et al. 12 proposed a new traffic device that minimized the number of stops when the vehicle arrival rate was low. This device did not require a complex mathematical model to simulate the state of traffic flow but did require artificial intelligence technology to simulate human-based traffic control of different traffic conditions, thus achieving real-time control. 12 Long et al. 13 presented a multi-objective optimization model, considered the intentions of traffic managers, and used Q-learning to optimize them. Ma and He 14 proposed a green wave traffic control system and used an adaptive genetic-artificial fish swarm algorithm to obtain a satisfactory solution.
Dommes 15 conducted experiments with three groups of adults that ranged in age and asked them to complete three tasks. The results showed that older people were more likely to have collisions while crossing the street that they prioritized fast walking over observing traffic flow when crossing the street. 15 Duim et al. 16 studied 1191 people aged 60 or above in Sao Paulo, Brazil and found that most elderly people living in Sao Paulo cannot cross streets at their full walking speed, thus highlighting an urgent need to change the traffic environment. Choi et al. 17 observed the starting delay and head-turning times of the elderly and young pedestrians when crossing the street based on three walking behaviors that may increase the risk of collision. Studies have shown that older pedestrians have shorter starting delays than younger pedestrians, turn their heads less frequently when crossing the street, and are less reliable in estimating the distance to a vehicle. The design of security technologies, activities, and the traffic environment should consider these behaviors to improve elderly pedestrian safety. 17 Dommes et al. 18 studied the disadvantages of crossing a two-way street at a certain age and found that older people cross the road more slowly, use a smaller margin of safety, and make more decisions that lead to collisions. These difficulties are especially evident when the vehicle is in a distant lane or approaching quickly. 18 Li and Sun 19 constructed a multi-objective optimization method for signal control design of urban traffic network intersections and used a cell transmission model to perform macro traffic flow simulations. Li and Sun 20 proposed a multi-objective optimization method of intersection signal settings and multi-turn lane assignments based on microscopic traffic simulations and grid mapping, and showed improved traffic performance through the combination of optimized lane assignment and signal setting.
GA is a random search method derived from the evolution rule of biology. It is a bionic algorithm that performs well in global optimization problems. Many examples have shown that GAs are efficient global optimization algorithms; however, they also have certain challenges, such as immature convergence and the strong connection between convergence speed and the number and type of parameters considered. Therefore, to improve the speed and accuracy of a GA in signal parameter optimization, this article analyzes the causes of these deficits and presents an improved GA and a new signal control parameter optimization method for intersections.
Problem description and building an objective function
Problem description
A typical intersection traffic flow distribution is shown in Figure 1. Each import channel has three types of steering traffic flow, as shown in Figure 2. Four phases are used in the intersection’s signal control. In the first phase, straight and right turn traffic flows of east and west import are allowed to pass. In the second phase, the left turn traffic flow of east and west import is allowed to pass. In the third phase, straight and right turn traffic flows of north and south import are allowed to pass. In the fourth phase, the left turn traffic flow of north and south import is allowed to pass. Using the minimum vehicle delay as the objective variable, we aim to obtain the optimal timing scheme for the intersection.

Intersection traffic flow distribution.

Four-phase control scheme.
Building an objective function
There are many evaluation indices of intersection traffic, such as capacity, the degree of saturation, delay, service level, fuel consumption, and queue length. Of these, delay is one of the indicators that are commonly considered. Delay is the loss of travel time and typically occurs due to traffic friction and control, which are closely related to cycle time and green ratio.
Based on real-time traffic data, this article builds an objective function based on the minimum average vehicle delay at the intersection. The Webster delay formula is used, and the delay of each vehicle at the intersection is shown in formula (1)

where d is the average delay per vehicle (s/pcu), C is the cycle time (s), q is the traffic flow that the entrance channel actually arrives (pcu/h),

Considering the typical four-phase intersection as an example, the general delay formula for the intersection is

where
The optimization process includes the real-time optimization of the effective green time for the four phases of the intersection, and the following constraint must be satisfied

where L is the total loss time (s) and
Considering the safety requirements of pedestrians crossing the intersection, the minimum green time per phase is not less than a value e; the minimum green time is assumed to be 10 s in this study. Thus, the timing of each phase must meet the following condition

Considering the maximum saturation constraint, a reasonable signal timing design should ensure that intersection saturation is not too large to avoid traffic congestion at the intersection. Then, the minimum green time of each phase must satisfy

Considering that the elderly need longer green times to cross the street than younger people, the minimum green time of each phase should be no less than the time required for the elderly to cross the street, and the timing of each phase must meet the following condition

where S is the effective length of pedestrians crossing the street at the intersection (m). This article uses the length of a zebra crossing as the effective length of pedestrian crossing, as shown in Figure 3, and V as the walking speed of the elderly (0.97 m/s). 21

Schematic diagram of effective length of pedestrian crossing.
The constraint conditions are shown in formula (8)

Taking the average vehicle delay as the objective function, the objective function is

where D is the total delay of the intersection and q is the traffic volume of the intersection.
Improved GA
Improvement of GA
The core idea of a GA is that the population of solutions evolves via the interaction of genetic operators, such as selection, crossover, and mutation, eventually yielding an optimal solution.22–24 However, there are many types of fitness value calibration methods, and no simple or general method exists for selecting them; thus, GAs are difficult to use in practice and may yield early maturity.25–27 If the solution approaches an optimal solution, the algorithm oscillates around the solution and converges slowly. To mitigate these problems, this article improves the GA in two ways: the calibration of the fitness value and the adaptive crossover and mutation rates.
Calibration of the fitness value
In the initial population, the fitness value of some individuals may be supernormal (i.e. very large). To prevent the fitness value from dominating the population and adversely affecting the proposed method, its propagation should be limited. In the near end, the fitness values of individuals in groups are similar and optimization is difficult, resulting in the solution oscillating around an optimal solution. At this point, the fitness value should be increased to improve optimization. Thus, fitness value calibration is required.
To calibrate the fitness value, this article proposes the following formula

where
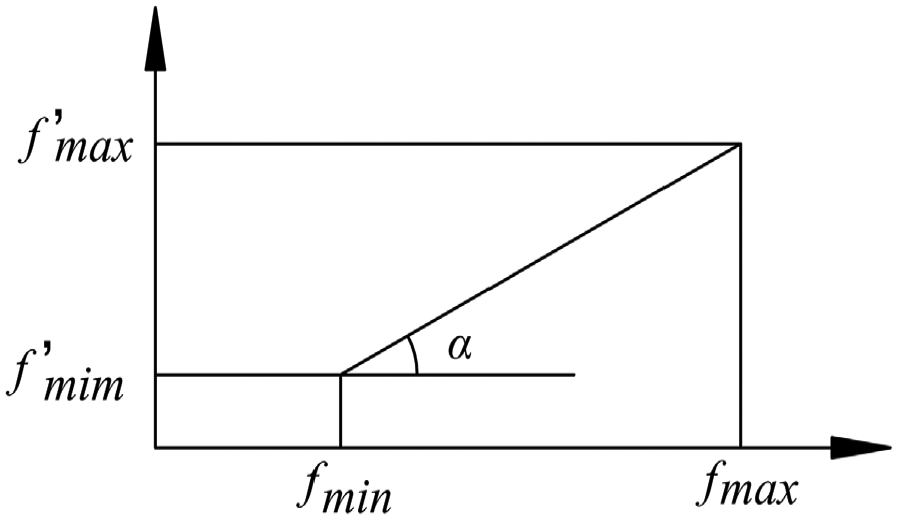
Calibration of the fitness value.
Improved adaptive crossover and mutation rates
The choices of crossover and mutation rates for a GA are critical to influencing the behavior and performance of the GA, directly affecting the convergence performance. The adaptive crossover and mutation rates dynamically adjust


where
Algorithm steps
Compared with the traditional GA, the improved GA ensures an improved convergence rate while maintaining population diversity. The GA regularly updates the group through repeated selection, crossover, and mutation operations so that the group tends to be optimal overall and achieves a more stable optimal individual. Due to space constraints, this article only gives a framework of the algorithm steps, as shown in Table 1.
Steps to improve genetic algorithm.

Case analysis
The intersection of Wenfeng road and Jiaochang road in Lintao County of Gansu Province, China, is selected. Wenfeng road lies along the east–west direction, and Jiaochang road lies along the north–south direction. The canalization of the intersection is shown in Figure 5. Each inlet of the intersection is composed of a dedicated left turn lane, a dedicated straight lane, and a dedicated right turn lane. The intersection is a four-phase control intersection, and its traffic flow data are shown in Table 2.

Canalizations of the intersection.
Traffic flow data.

To characterize the effectiveness of the improved GA, the Webster algorithm is first used to calculate the signal control parameters of the intersection; 23 these results are shown in Table 3. Then, the improved and traditional GAs are written, and a simulation is performed in MATLAB. In this article, some parameters in the simulation process are set as follows: maximum evolutionary time = 100, initial population size = 50, crossover rate = 0.7, mutation rate = 0.01, maximum cycle time = 140 s, and loss of cycle time = 10 s. In this article, the traditional and improved GAs are used to optimize the objective function, and the optimal solution is determined within 100 iterations. The results of this process are shown in Table 3 and Figure 6.
Comparison of results of different algorithms.
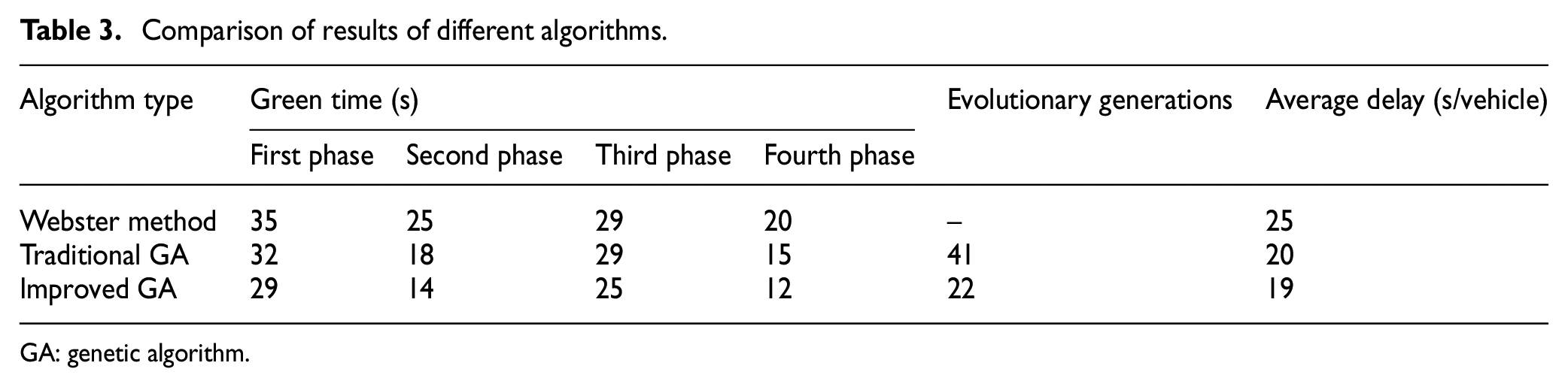
GA: genetic algorithm.

Comparison of results of different algorithms.
Based on Table 3 and Figure 6, the average delay is 19 s using the improved GA, which is better than the traditional GA and the Webster method in terms of the control effect. The improved GA also shows an improvement compared with the traditional GA in terms of the convergence rate, which can be found from the evolution process figure shown in Figure 7.

Iterative convergence process of traditional genetic algorithm and improved genetic algorithm.
Conclusion
In this article, the problem of signal parameter optimization for single intersections is studied. Based on the crossing characteristics and travel safety of the elderly, the average vehicle delay is used as the control objective, and the green signal ratio and cycle time are used as control variables. Using traffic data, the Webster algorithm, the traditional and improved GAs are used to optimize the signal control parameters of intersection. In this article, we conduct simulations in MATLAB which show that the traditional and improved GAs perform better than the Webster algorithm. Compared with the traditional GA, the improved GA can find the global optimal solution more quickly and accurately, thus reducing the average vehicle delay. The comprehensive effect of the improved GA investigated in this study should be studied in more detail in the future.
Footnotes
Handling Editor: James Baldwin
Data availability
The data used to support the findings of this study are included within the article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the Natural Science Foundation of China (No. 71861023), the Program of Humanities and Social Sciences of the Education Ministry of China (No. 18YJC630118), and the Foundation of A Hundred Youth Talents Training Program of Lanzhou Jiaotong University.