
Abstract
Due to the ever-existing environmental disturbance of ocean wave and nonlinear of the system, it is difficult to obtain a satisfying control performance for the longitudinal attitude and desired height tracking of the fully submerged hydrofoil vessel. To solve such problems, an adaptive compound second-order terminal sliding mode controller is proposed. First, a combination of the complementary sliding mode surface and second-order terminal sliding mode control is introduced. Therefore, the closed system is uniformly ultimately bounded, and the steady-state errors converge to a small neighborhood of equilibrium point. Second, the chattering problem in an actual controller is solved by eliminating the sign function contained in the controller after integration without influencing the stability of the closed-loop system. Besides, a revised adaptive radial basis function neural network is introduced to estimate the derivative of the unknown environmental disturbances without the prior information of the disturbance. Finally, the stability of the system is proved by the Lyapunov stability theory. Numerical experimental results demonstrate that the proposed method possesses fast tracking ability and can decrease the stabilization error and the tracking error simultaneously.
Keywords
Introduction
As an advanced marine surface vessel, the fully submerged hydrofoil vessel (FSHV) is widely used as its advantages of speediness, maneuverability, and seakeeping ability. The hull is elevated above the sea surface by the lift force generated by the interaction of the fluid and the foils. Thus, the resistance is reduced. During the cruising, the vessel is unstable due to the lack of restoring force and moment. Meanwhile, the FSHV is a nonlinear dynamic system with uncertain external disturbances caused by waves. Considering that the literal and longitudinal motion couples little, this article concentrates on the longitudinal attitude stabilization and desired height tracking of the FSHV.
There are some research studies about the motion control of the FSHV in recent years. 1 The optimal preview servo system with a backward and feed-forward method is designed to attenuate the wave disturbance influence; however, the prediction of the wave is not considered in the controller design. 2 The Kalman filtering–based controller is studied to improve the performance of the hydrofoil craft, while the controller is only effective in still water. 3 The decoupling control method is proposed for the hydrofoil craft control considering the single-input single-output (SISO) linear model. 4 Gradually, the proportion integration differentiation (PID) control is applied for the motion control of the hydrofoil vessel. However, large overshoot will appear, and the PID parameters should be chosen with rich experience. 5 The hierarchical robust control and feedback control based on iterative learning approach is proposed for the path following and course keeping of the FSHV.5,6 Other control methods, such as linear quadratic regulator (LQR), robust control, and output feedback control, are introduced for the hydrofoil vessel motion control. The methods mentioned above are always utilized under the assumptions that the model is linearized and the influence of the environmental disturbances is ignored, making it difficult to be applied in a real system.
As the performance of the nonlinear systems are degraded by the uncertain disturbances, many nonlinear control algorithms have been introduced such as feedback linearization control, 7 fuzzy neural network algorithm,8–10 adaptive backstepping method,11,12 and sliding mode variable structure control (SVSC).13,14 The SVSC has received much attention in recent years due to its fast response, good transient performance, insensitivity to the external disturbances, and the simplicity of implementation. The traditional sliding mode surface is a linear hyperplane; however, it converges in a long time. To improve the performance of the closed system and the convergence speed of the states, the nonlinear terminal sliding mode control (TSMC) method is proposed.15–17 The TSMC involves the nonlinear function in the sliding hyperplane which makes the state converge to the equilibrium point in finite-time. A novel TSMC is studied to solve the trajectory tracking problem of the underactuated autonomous underwater vehicles. 18 An adaptive TSMC with a strictly lower convex function is designed for the hypersonic flight vehicles’ altitude and velocity tracking control with excellent robustness to overcome the singularity and finite-time convergence problem. 19 The TSMC is superior over the conventional sliding mode control technique in terms of the finite-time fast convergence and high-state control precision. The linear sliding mode converges faster than the nonlinear sliding mode when the states approach the neighborhood of the equilibrium point. The global fast dynamic terminal sliding mode control (GTSMC) is proposed and has been widely studied.20,21 On the other hand, in order to reduce the control error, the complementary sliding mode control (CSMC) has been designed 22 and applied to the fault-tolerant control for six-phase permanent magnet synchronous motor (PMSM) drive system, chaotic system, and so on.23,24 The CSMC can decrease the tacking error without influencing the stability of the system.
Although the sliding mode is insensitive to the external disturbance and uncertainties, its control signal is discontinuous on the switching manifold. The phenomenon of chattering results in the actuator abrasion and degrades the performance of the closed-loop system. Some efforts have been made to eliminate the chattering problem. Replacing the discontinuous signal function by the continuous saturation function is applied. 25 Nevertheless, the selection of the boundary layer may bring a steady-state error. If the selected switching gain is too large, the chattering phenomenon will be deteriorated. Besides, if the switching gain is too small, the stability of the system cannot be guaranteed. Recently, the second-order terminal sliding mode control (SOTSMC) is introduced. The discontinuous function is contained in the time derivative of switch control, and the actual continuous controller is obtained by integral. Thus, the chattering phenomenon is solved.26,27 As mentioned before, the SOTSMC is mainly studied with the backstepping method, and the research of combining the complementary and global TSMC is less mentioned. The tracking of the desired height has not been studied for the FSHV. Hence, it is necessary to study effective control strategies to attenuate the steady-state error and the tracking error of the FSHV.
The FSHV is inevitably influenced by the ocean waves when cruising at high speed, thus result in the degradation of the control precision and the stability of the system. Recently, the disturbance observer is designed for the disturbance compensation.28–30 However, much of the above-mentioned work assumes that the disturbance is linear or constant and the prior knowledge of the disturbance is needed. Unfortunately, the disturbance forces generated by ocean waves that exert on the hydrofoil vessel are uncertain and complex. The prior information of the disturbance is difficult to obtain as the variable frequency of the ocean waves caused in different encounter angles. 31 The neural network has been widely used in control nonlinear systems on account of its self-learning and universal approximation capabilities. The radial basis function neural network (RBFNN) is studied to appropriate the uncertain parameters and items as its faster operation and the simple realization structure. 32 The RBFNN is designed for disturbance estimation and has good estimated accuracy, 33 while the knowledge of the upper bound of the disturbance derivative is always required in the process to apply the neural network in disturbance approximation.
Inspired by the above observations, this article proposes an adaptive compound second-order terminal sliding mode control (ACSOTSMC) for the longitudinal motion control and the desired height tracking of the FSHV. This method combines the complementary sliding mode surface and the global second-order sliding mode control strategy; thus, it reduces the control error and guarantees the steady-state error bounded simultaneously. Furthermore, considering that the FSHV needs to cruise at the desired height under certain conditions, the proposed method possesses the fast transient procedure and accurate height tracking stability. In the presence of the uncertain disturbances caused by ocean waves, the adaptive RBFNN is designed for the disturbance derivative estimation. It possesses fast learning and accurate approximation advantages and can estimate the ocean disturbances precisely without the priori information of the disturbance. Meanwhile, the control signal obtained is chatterless after getting integrated. Compared with other existing methods, the main contributions of this work are summarized as follows:
The derivative of the uncertain disturbance is estimated by the neural network without prior information of the disturbance. Then, the disturbance is compensated in the controller.
A compound adaptive second-order fast TSMC which combines the complementary sliding mode in the first-order sliding surface is designed. Thus, the proposed compound control law is chartless after integrating. Meanwhile, the steady-state error and the tracking error decrease a lot.
In order to limit the adaption process and avoid the overshoot of the controller, the modified adaptive law is introduced. The controller proposed has the stabilization ability and fast tracking capability of the desired height. The steady-state error and the tracking error are uniformly bounded in finite-time.
The structure of this article is as follows. The nonlinear dynamic model of the FSHV with uncertain external environment disturbance is established in section “Problem formulation.” In section “Adaptive control law design,” the adaptive RBFNN is proposed to estimate the disturbance and the adaptive compound second-order sliding mode controller is designed. The stability of the closed-loop system is demonstrated through the Lyapunov function. At last, the numerical experimental results are presented in section “Simulation results” to verify the effectiveness of the proposed strategy. Finally, the conclusions are given in section “Conclusion.”
Problem formulation
Nonlinear dynamic model of the FSHV
A particular configuration of the FSHV is shown in Figure 1, and the right-hand coordinates are defined in Figure 2. The FSHV is equipped with T-shaped bow foil and a high aspect ratio aft foil. The T-shaped bow foil contains two synchronous flaps. The aft foil has a pair of central synchronous flaps and two ailerons on the outside of the central flaps symmetrically. The bow foil flaps and the central flaps of the aft foil are executed for the longitudinal motion control. As the lateral motion couples little with longitudinal motion, the longitudinal motion is considered independently and the FSHV cruises at a constant speed.

The configuration of the FSHV.

The coordinate system of the FSHV. 34
The origin of the earth-fixed frame is assumed to coincide with the body-fixed frame. The relation between earth-fixed and body-fixed coordinate is obtained from literature. 35 Thus, we can get the relationship between the heave velocity and pitch angle velocity in the earth-fixed frame and body-fixed frame as

where


where
Transforming the function of the FSHV in equations (2) and (3), the dynamic function can be rewritten as 4


where the parameters are defined as




For the convenience of the further design, considering equations (1), (4), and (5) and translating them to the state-space function utilizing the Laplace transformation, the second-order system model is represented as

where


Considering the mode uncertainties and ocean wave loads that generate parameter perturbations, the state-space system can be obtained as

where
Assumption 1
The nonlinear function

Assumption 2
The generalized disturbance
Remark 1
The parameter perturbations and external disturbances are considered as the generalized disturbance exist in the practical FSHV system. The derivative of the generalized disturbance can be estimated by the neural network estimator and can be tackled well in the closed-loop system. The states in the system are available for controller design.
Wave disturbance
Assumption 3
Under the assumptions that the fluid is rational, inviscid, incompressible, infinite, and irrotational, the function of stochastic ocean waves can be presented as follows



where
The Pierson–Moskowitz (PM) spectrum

where
The encounter frequency is defined as

where
Adaptive control law design
Disturbance observer
In many controllers’ design, the upper bounds of the disturbances are assumed to be known and determined, while in practical applications, they are difficult to gain. Furthermore, the disturbance of the FSHV system generated by the ocean waves is uncertain according to the various encounter angles and marine environment. Therefore, the estimation of the generalized disturbances in the FSHV system is significant. The RBFNN is proposed for the derivative of the uncertain generalized disturbance estimation in this article, and the prior information of the uncertain disturbances is not required. The RBFNN estimator has an input layer, a hidden layer, and an output layer. For a continuous derivative of unknown disturbance

The optimal weight vector

With the Gaussian function

where
The estimation of the derivative of the disturbance

where
Compound SOTSMC
In this section, the adaptive compound second-order sliding mode control is designed. Utilizing the complementary sliding mode scheme and the fast terminal sliding mode scheme, the states of the FSHV are led to the neighborhood of the equilibrium points in the finite-time and the stabilization errors are decreased and bounded. Furthermore, the trajectory stability of the controller to track the desired height is guaranteed and possesses a fast transient procedure. Considering the external disturbance exerts on the FSHV and in order to guarantee the closed system uniformly ultimately bounded, the tracking error of the states are defined as

The time derivative of the tracking error is defined as

where
The adaptive compound second-order sliding mode control design contains the sliding surface design, the equivalent control law, and the switching control law design. The sliding surface is designed as follows:
Step 1:
The first sliding mode is composed of complementary sliding mode which contains the generalized sliding surface, and the complementary sliding surface. The generalized sliding surface is as follows

where
The complementary sliding surface is designed as

Then, the first sliding mode surface is as

Substituting equations (19) and (20) into equation (23) and differentiating

Step 2:
To guarantee the sliding mode

where
When
When

The

where
Remark 2
For marine vehicle systems, the high-order coupling hydrodynamics is sufficiently smooth. Therefore, it is reasonable that the nonlinear function satisfies the Lipschitz condition.
Control law design
The main objective is to guarantee the state variables
The derivative of the controller is designed as

where


where
Thus, the actual control is obtained after integrating equations (29) and (30)


where

Closed-loop system of the FSHV.
Remark 3
For the FSHV system, if the control law is designed as equations (31) and (32) and the sliding mode surface are selected as equations (23) and (25), the system states can be led to the sliding surface boundary within finite-time. The discontinuous item contained in the derivative of the controller which may result in the chattering is avoided after being integrated. The controller design possesses the characteristics of fast time convergence, highly control and tracking precise, and the robustness to the generalized disturbances.
Stability analysis
In order to prove theorem 1, the following lemmas are needed.
Lemma 1
For bounded initial conditions, if there exists a continuous and positive definite Lyapunov function satisfying
Lemma 2
For

Theorem 1
Considering the dynamic function of the FSHV with generalized disturbances in equation (9), if the control law is designed as equation (33) with the disturbance estimation in equation (18), there exist parameters
Proof
In order to prove the stability of the system and considering the generalized disturbances, the Lyapunov function of the closed-loop system is defined as follows

where

Considering the dynamic functions of the FSHV system, thus

Then, substituting the control law designed before as equation (33), it can be obtained

According to the property of the matrix trace that

Considering the following adaptive laws


where
According to lemma 2 and

Thus, it yields that

In the similar way, it can be gained that

Substituting equations (39) and (40) into equation (38) and considering equations (42) and (43), it can be gained that

Choosing the parameters


Remark 4
Because of equation (44) that the control outputs are bounded and the steady-state error converges to the neighborhood of the desired point. After being integrated, the controller is continuous and the chattering problem is solved.
Remark 5
In practice, the stabilization error of the system cannot converges to zero exactly; thus, the adaptive law in equations (39) and (40) may increase all along and boundless. It would lead to a big overshoot of the controller. Thus, to limit the adaption process, the modified smooth version of the dead-zone scheme is designed as

Then, the adaptive law with the continuous dead-zone scheme is redesigned as


Thus, the modified adaptive law using the continuous dead-zone scheme guarantees the boundedness of the stabilization error and the controller.
Simulation results
To verify the effectiveness of the proposed control strategy, we applied the control law to the FSHV system for the longitudinal motion stabilization. The simulations are conducted through the MATLAB platform. For the disturbance estimator and controller design, the parameter of the FHSV system is shown in Table 1. Assuming that the FSHV cruises at a constant speed, the course direction of the craft is not changed. The parameter perturbations are about
Parameters of the FSHV system.

FSHV: fully submerged hydrofoil vessel.
The simulation process is arranged as the following three steps. First, the RBFNN algorithm used for the derivative of the generalized disturbance estimation is analyzed. Then, the results are compared between TSMC, ACSOTSMC, and SOTSMC for the longitudinal motion stabilization of the FSHV. The ACSOTSMC is the method we proposed in this article. The SOTSMC is designed according to Xiong and Zhang 20 and Mondal and Mahanta. 27 The TSMC is the common TSMC designed for comparison. Thus, the statistics of the methods are calculated to prove the effectiveness of the proposed method. At last, the ability of the constant height tracking of the FSHV is analyzed.
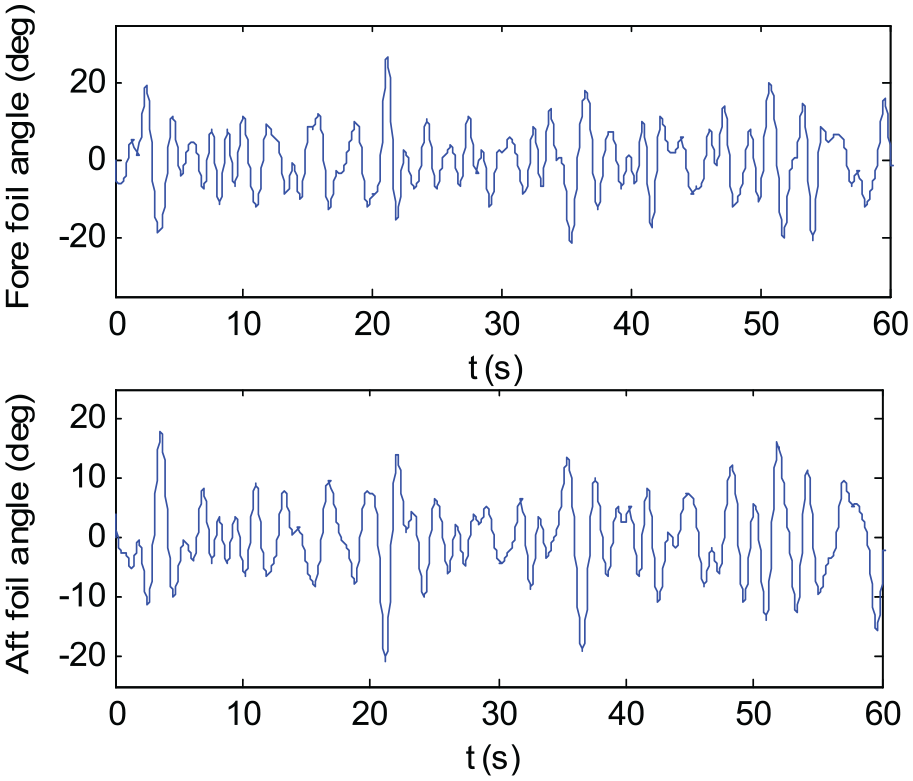
First of all, the effectiveness of the neural network design for the generalized disturbance estimation is proved. The states of the system
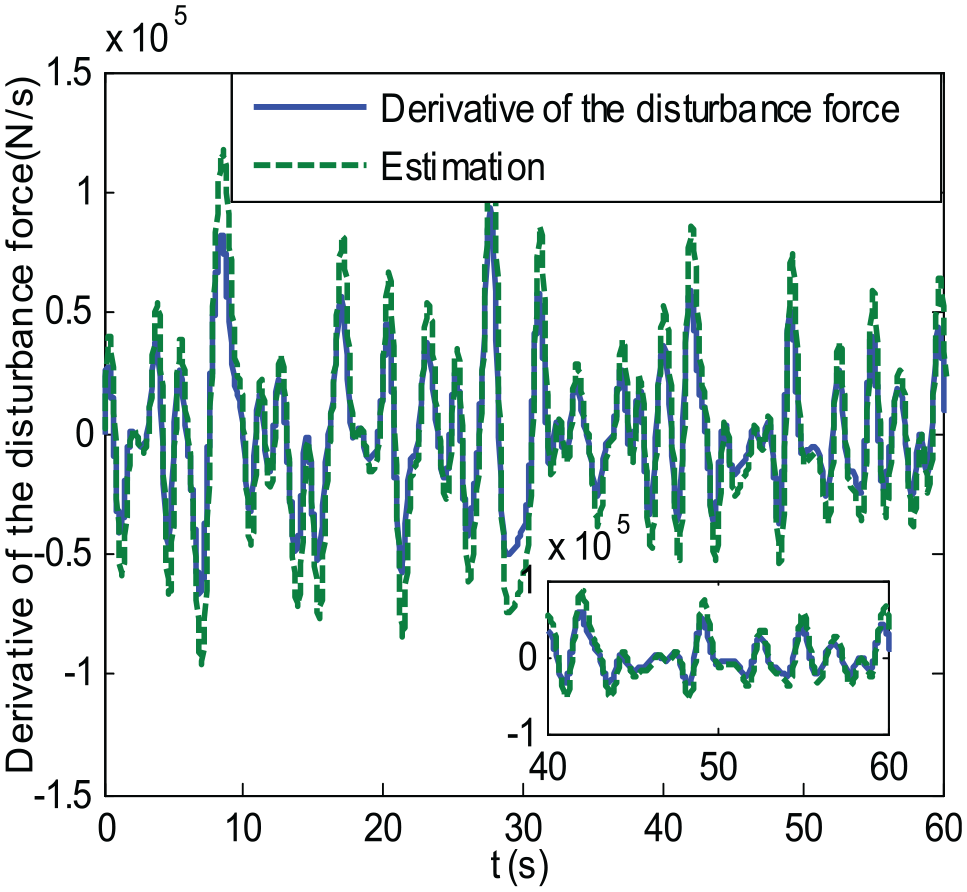
Derivative of disturbance force.

Derivative of the disturbance moment.
According to the estimation results, the adaptive RBFNN can estimate the derivative of the generalized disturbances exactly. Thus, the estimation can be used in the control strategy design to compensate for the disturbances.
The stabilization of the longitudinal motion of the FSHV between the TSMC, ACSOTSMC, and SOTSMC is compared in Figures 6 and 8 to demonstrate the effectivity of the proposed method. The initial conditions are chosen to approximate the zero. In order to show the performance of the ACSOTSMC clearly, the heave motion and pitch angle of the FSHV are depicted individually in Figures 7 and 9, respectively. The control output of the ACSOTSMC and the TSMC is depicted in Figures 10 and 11, respectively. The parameters of the compound second-order fast TSMC are selected as

Heave motion of the FSHV.
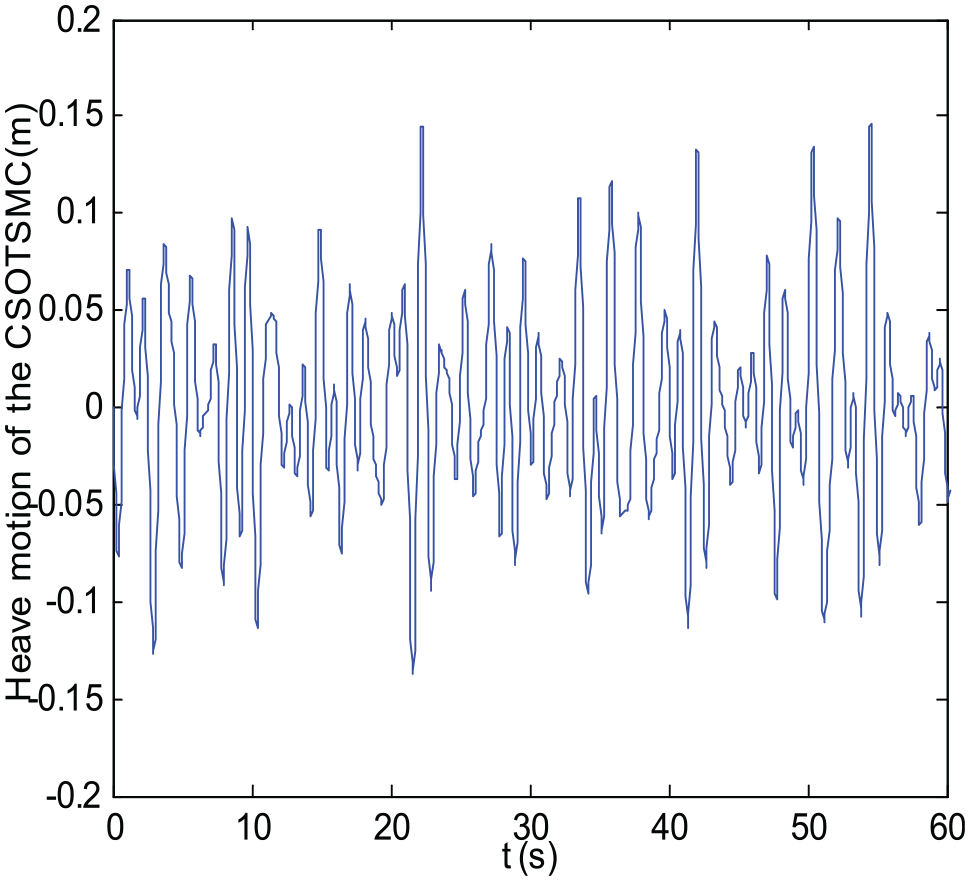
Heave motion of the ACSOTSMC

Pitch angle of the FSHV.
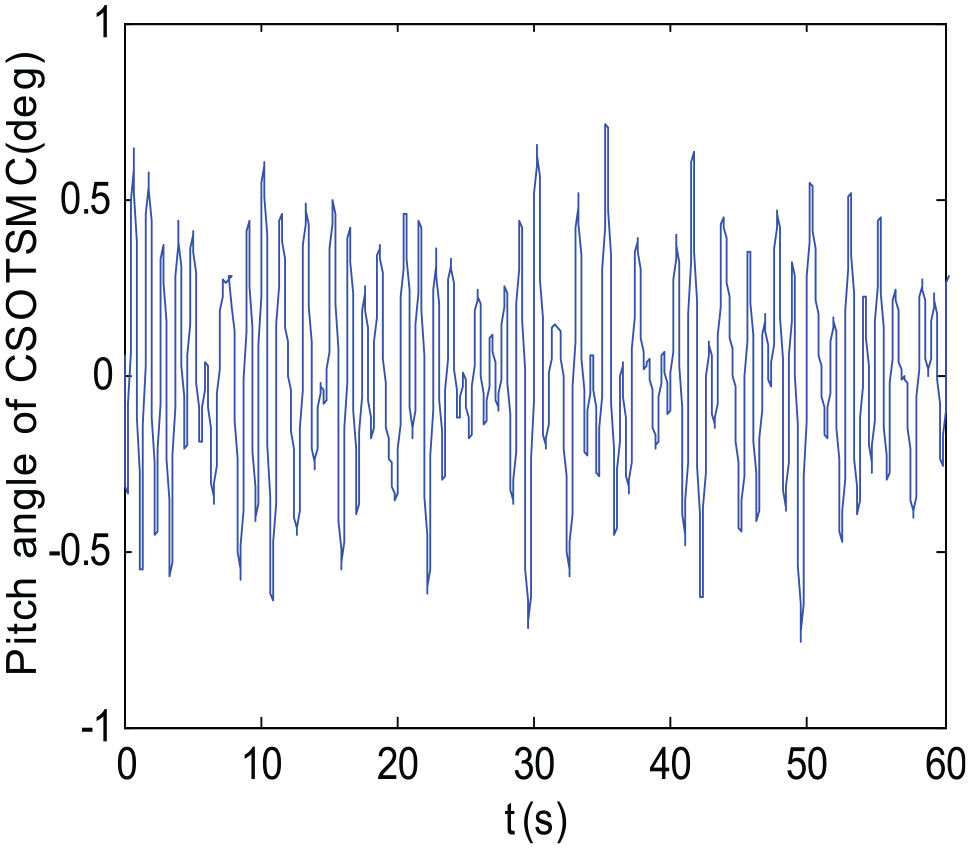
Pitch angle of the ACSOTSMC.
Control output of the ACSOTSMC.

Control output of the TSMC.
To testify the performance of the three controllers explicitly, the performance criterions as root mean square error (RMSE) and the average value (AVE) of steady-state error are defined. The desired values of states are 0. The AVE and the RMSE of the heave motion between different methods are calculated and plotted in the bar graph in Figures 12 and 13, respectively. The AVE and the RMSE of the pitch angle are plotted in Figures 14 and 15, respectively. The RMSE value of the steady-state error and the AVE of the steady-state error are defined as

Average of the heave motion.

RMSE of the heave motion.

Average of the pitch angle.
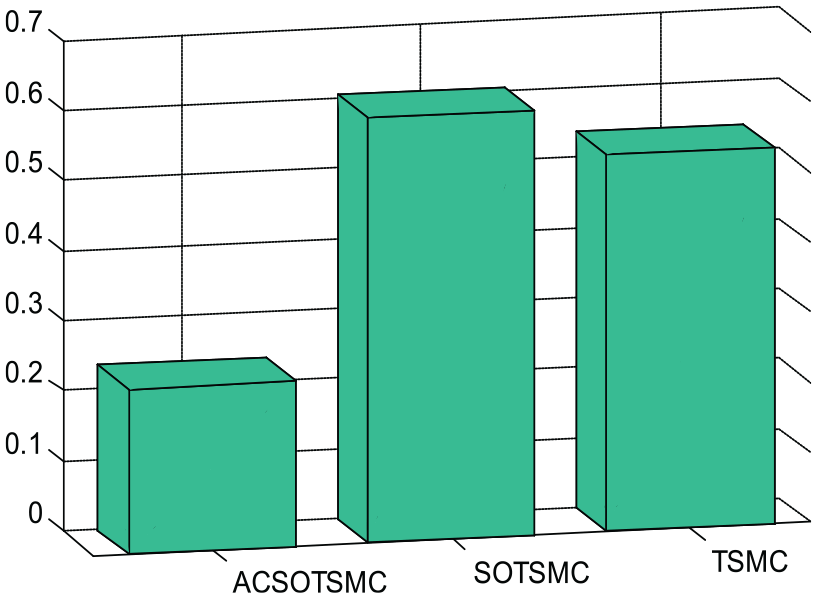
RMSE of the pitch angle.
From the experimental results, we can obtain that the proposed method exerts satisfying performance. Considering Figures 6–9 and Figures 12–15, it is clear that the stabilization error of the ACSOTSMC is the smallest among the three methods; furthermore, the proposed strategy has stronger robustness in the presence of the generalized disturbances.
The state stabilization results of the ACSOTSMC and the SOTSMC in Figures 6 and 8 show that the complementary sliding mode surface combined with the second terminal sliding mode surface is effective to improve the control precisely. Comparing the performance of the ACSOTSMC and the TSMC and considering the control outputs in Figures 10 and 11, it can be concluded that the second-order sliding mode controller is able to attenuate the chattering problem as the control output of the ACSOTMSC is much smoother than that of the TSMC.
The state convergence time is one of the objectives of the controller. The convergence time of the heave motion and the pitch angle between three different methods are summarized in Table 2. We can clearly observe that the convergence speed of the proposed method is the fastest. The ACSOTSMC achieves faster convergence rate than the TSMC. Thus, the steady-state error is leading to the neighborhood of the zero in finite-time.
Convergence time of methods.

ACSOTSMC: adaptive compound second-order terminal sliding mode controller; SOTSMC: second-order terminal sliding mode control; TSMC: terminal sliding mode control.
Considering that under some certain conditions, the FSHV needs to cruise at the desired constant height; thus, the ability of the FSHV to track the desired height is analyzed. The parameters are selected as before, and the desired height is chosen as case 1:

Desired height tracking of the FSHV.

Desired height tracking of the FSHV.
As shown in Figures 16 and 17, the two methods can track the desired height and keep stable at the desired height. The transient time of the ACSOTSMC and SOTSMC in case 1 is 3.1 and 4.2 s, respectively. The transient time of the ACSOTSMC and SOTSMC in case 2 is 3.9 and 4.5 s, respectively. It is clear the proposed method has a fast transient procedure and can track the desired trajectory more accurate in a transient period. Thus, the proposed method performs better than SOTSMC. Meanwhile, when the heave of the FSHV arrives at the desired height, the steady-state error is much small than the SOTSMC.
Conclusion
An ACSOTSMC for the longitudinal attitude control of the FSHV has been proposed in this article. The RBFNN is introduced to estimate the derivative of the uncertain generalized disturbances, and it has a precise estimation. The results show that the proposed method can improve the control precision and much robust to the disturbances. The disturbances are compensated through the observer, the complementary sliding mode decreases the steady-state error. The use of the global fast terminal sliding mode scheme makes the proposed method possess fast tracking and steady-state ability. The chattering problem of the controller is avoided as the actual controller is gained after being integrated. Thus, the proposed method is effective for the stabilization and desired height tracking of the FSHV.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China subsidization project (51579047), the Natural Science Foundation of Heilongjiang Province (QC2017048), the Natural Science Foundation of Harbin (2016RAQXJ077), and the fundamental research funds for the central universities (3072019CF407).