
Abstract
Because of the heavy use of electrical equipment, harmonic pollution is becoming more and more serious, which brings potential safety risks to our lives. In view of the fact that active power filters can effectively eliminate harmonics, an adaptive second-order sliding mode fuzzy control based on the backstepping method is proposed to eliminate harmonics in this article. The second-order sliding mode control can eliminate chattering in the system and results in a smoother controller. The uncertainties in the system are approximated by a fuzzy control system, and the adaptive laws are designed to ensure the stability of the system. Backstepping control can improve the stability and robustness of closed-loop systems. Simulation results show that the proposed method has better tracking effect, strong robustness, and stability and can effectively eliminate harmonics.
Keywords
Introduction
With the advancement of technology and the development of human society, electrical equipment is widely used in our daily lives. However, while electrical equipment brings us convenience, it also produces a lot of pollution, that is, harmonics. Harmonics not only affect the use of electrical equipment but also may cause fire. Therefore, it is very important to eliminate harmonic pollution. There are many ways to control harmonics, which are mainly divided into harmonic elimination using active power filter (APF) and passive power filter. However Salimi et al. 1 selected harmonic current cancelation which made them ignored by users. Due to the limitations in passive devices, active devices have caught attention over these years. Acuna et al. 2 used a series active filter to compensate current harmonics injected by high-power rectifiers. Wu et al. 3 presented an APF with division-summation digital control to shape source current by introducing one degree of freedom to compensate load harmonic currents. Tan et al. 4 utilized a shunt APF based on feedback control to realize harmonic elimination.
The adaptive control can automatically adjust the system, and it has better adaptability to dynamic processes. Fuzzy control can improve the stability and robustness of the system by approximating the uncertainties of the system. Pan et al. 5 chose adaptive fuzzy control combined with PD control to design a much simpler control law in order to achieve global stability and asymptotic stabilization. Khanesar et al. 6 presented an adaptive fuzzy controller which can be applied to non-linear systems with little knowledge about the system. Hou et al. 7 combined adaptive fuzzy control with neural network control on the APF to eliminate harmonics. Fei and Chu 8 used an adaptive sliding mode controller to combine neural network control in order to eliminate harmonics. Zhu and Fei 9 adopted fuzzy sliding mode control on PV grid-connected inverter creatively to ensure the good robustness of the system. Some fuzzy controllers10–14 and neural controllers15–20 were investigated for dynamical systems.
However, only adaptive control and fuzzy control are not enough to implement a fully functional controller, so second-order synovial control is added to the controller. As a special sliding mode control method, second-order sliding mode control can reduce system chattering by transferring discontinuous links to ensure better system operation. Ding et al. 21 designed a controller based on second-order sliding mode control to verify that second-order sliding mode control can effectively eliminate system chattering. At the same time, second-order sliding mode control can also improve the dynamic performance of the system. Tanelli and Ferrara 22 selected a second-order sliding mode controller to enhance the robustness of the system and improve the system behavior. Thakar et al. 23 designed a new sliding surface which contains second-order sliding surface to generate a position trajectory for container from the control input signal. Manceur et al. 24 developed a second-order mode type-2 fuzzy controller to solve the tracking problem of the system. Ferrara and Rubagotti 25 exploited second-order sliding mode control based on a harmonic potential field to enhance the robustness of the system.
In order to improve the performance and control of the system, backstepping control is added in this article. The idea of backstepping is to design a controller recursively by considering some of the state variables as “virtual controls” and designing intermediate control laws. Backstepping can achieve the goals of stabilization and tracking.26–28 Fei and Liang 29 combined adaptive fuzzy control, backstepping control, and fractional order control together to ensure the stability of system. Fang et al. 30 used backstepping control with adaptive control to improve the performance of a microgyroscope system. Ahn et al. 31 presented an adaptive backstepping controller on a pump-controlled electrohydraulic actuator. Nikdel et al. 32 designed a controller which combined fractional order, adaptive control, and backstepping control together to control the robust finite time of dynamical systems.
Motivated by the research above, in this article, an adaptive second-order sliding mode fuzzy controller based on backstepping strategy is designed to eliminate harmonics effectively. The innovation of the study can be emphasized as follows:
Second-order sliding mode can reduce system chatter by transferring discontinuous items that may occur in the system so that the controller can be smoother compared with sliding mode control. So, the proposed method can both improve the system performance and enhance system robustness against model uncertainties and external disturbances as well.
Adding backstepping control into the controller can decompose a complete system design problem into a series of low-order system design problems. Also, combining backstepping control and second-order sliding mode control together is an innovation, especially in the three-phase APF. The transpose and inverse matrix operations of the matrix are regarded as the innovation in the process of derivation and certification of the controller.
This article is organized as follows: the principle and the dynamic model of three-phase APF are described in section “Principle of APF.” In section “Adaptive second-order sliding mode fuzzy control based on backstepping method,” an adaptive second-order sliding mode fuzzy controller based on the backstepping strategy is derived in the Lyapunov framework. Simulation results are demonstrated in section “Simulation study.” Finally, conclusions are provided in section “Conclusion.”
Principle of APF
The APF discussed in this section is the most widely used parallel voltage-type shunt active power filter (SAPF), which is usually applied to the three-phase system where a large capacity is required. The reason why the SAPF is most applied in the three-phase system is its excellent performance and easy implementation. In this section, we will study the three-phase three-wire system and develop a dynamic analytical model of the APF.
The structure of three-phase three-wire APF is shown in Figure 1. As we can see, it contains three sections, harmonic current detection module, control system, and main circuit. The main circuit consisting of power switching devices produces compensation currents according to the control signal from the control system. In order to eliminate harmonic component, the compensation currents should be the same magnitudes and opposite phases with the harmonic currents.

Block diagram for APF.
According to Kirchhoff’s voltage and current laws, we can get the following circuit equations

where
By summing the three equations in (1), taking into account the absence of the zero-sequence in the three-wire system currents, and assuming that the AC supply voltages are balanced, we can obtain

The switching function

where k = 1,2,3, …
Define
And the switching state function

Hence,

Equation (4) becomes

So the dynamic model of APF can be written as

where
Adaptive second-order sliding mode fuzzy control based on the backstepping method
The design of the proposed controller consists of four steps: design the second-order sliding surface using backstepping control; design the equivalent control law; use fuzzy control to approximate the uncertain term in the control law; design the adaptive law to guarantee the system is stable, and use Lyapunov theorem to prove the stability of the system. System block diagram is shown in Figure 2:

Block diagram for the proposed control system.
Detailed description of the design steps is as follows:
Define the tracking error

where
The derivative of the tracking error is

Define the virtual control volume

where
Set virtual error

And the derivative of the virtual error is

Design the second-order sliding surface as follows

where
So the derivative of the second-order sliding surface could be written as

Define the new control law as

Choose a Lyapunov function as

Then

Take equation (16) into equation (18)


While
By using fuzzy control, we design
where


where
Theorem
The controller (21) and adaptive laws (22), (23) are designed to ensure signal
Proof
Set the optional parameters as


where
Set the minimum approximation error as

where
Choose a Lyapunov function as

Then

Taking equations (20), (22), and (23) into equation (28) yields

While
Simulation study
A simulation example using Matlab/simulink platform is implemented in this section for the purpose of evaluating the performance of the proposed controller. In simulation, the switching frequency value of voltage PWM converter is chosen as 20,000 Hz. The parameters of the proposed controller are chosen as the following:
The simulation results are shown below. Figure 3 shows the member function. The membership functions are chosen as the following:

The member function of
Figure 4 shows the development trend of instruction current and compensation current. When APF started to work at

The instruction current and compensation current.
Figure 5 illustrates the compensation current tracking error of adaptive backstepping fuzzy second-order sliding mode controller. It is clearly seen that the tracking error can maintain a small value, verifying the effectiveness of the proposed controller in tracking compensation current.
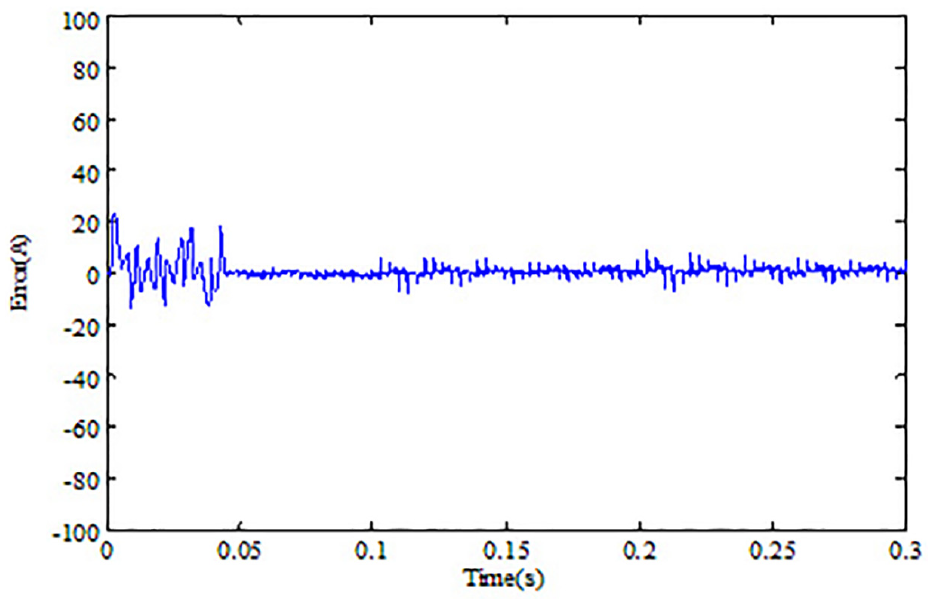
The compensation current tracking error.
Figures 6 and 7 are the load current and source current of adaptive backstepping fuzzy second-order sliding mode controller, respectively. It is clearly shown in Figure 6 that the amplitude of the current waveform changes when the load in the circuit increases at t = 0.1 s and t = 0.2 s but remains and stabilizes in the sine wave. When APF started to work at t = 0.04 s, source current has a smaller amplitude changes, but it can quickly recover and stabilize in a sine wave; even when load starts to change at t = 0.1 s and t = 0.2 s, current can remain in sine wave, so the system proved to have strong robustness and stability.

Load current of adaptive backstepping fuzzy second-order sliding controller.

Source current of adaptive backstepping fuzzy second-order sliding controller.
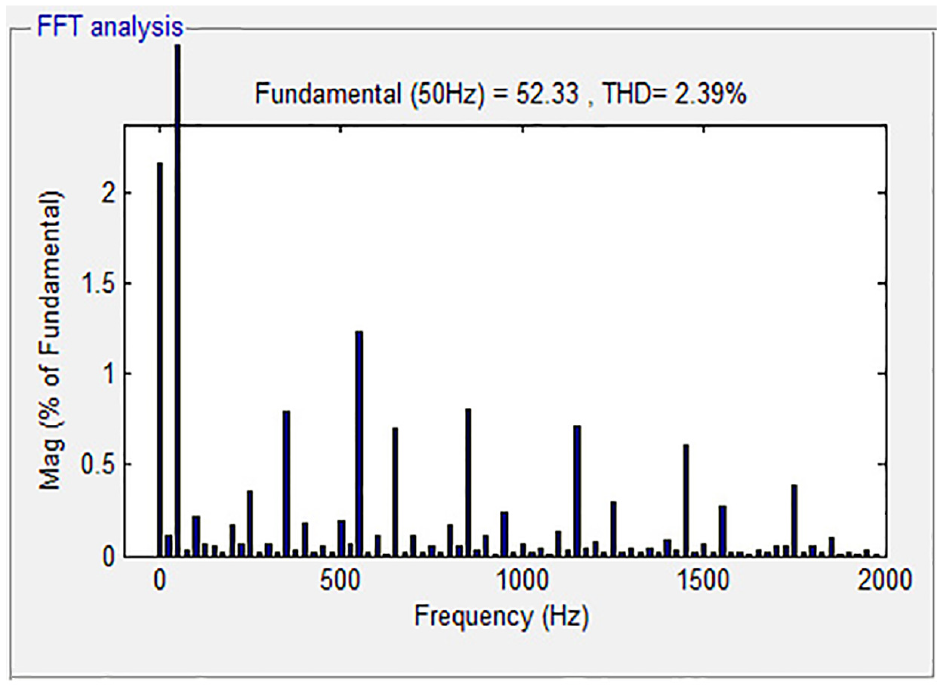
The total harmonic distortion (THD) values during simulations at four different times are shown from Figures 8 to 11. At

Harmonic spectrum of source current at 0 s.

Harmonic spectrum of source current at 0.06 s.

Harmonic spectrum of source current at 0.16 s.
Harmonic spectrum of source current at 0.26 s.
Table 1 reveals the values of THD of adaptive backstepping fuzzy second-order sliding mode control and dynamic surface adaptive fuzzy sliding mode control. Although all these values are below 5%, however, the proposed method is much lower, and the THD of the proposed value keeps a decreasing trend, indicating that the robustness and tracking performance of the proposed controller is better.
The comparison of THD values between adaptive backstepping fuzzy second order sliding control and dynamic surface adaptive fuzzy sliding control.

THD: total harmonic distortion.
In order to have an intuitive judgment of the effectiveness of the proposed controller, Table 2 shows the comparison of values of mean square error between adaptive backstepping fuzzy second-order sliding mode control and dynamic surface adaptive fuzzy sliding mode control. By replacing sliding mode control with second-order sliding mode control, the mean square error reduces significantly which proves a great improvement in tracking performance.
The comparison of values of mean square error between adaptive backstepping fuzzy second-order sliding mode control and dynamic surface adaptive fuzzy sliding mode control.

Conclusion
In this article, an adaptive fuzzy second-order sliding mode controller based on the backstepping strategy has been applied on APF to eliminate harmonics. In the design process of the control system, the fuzzy control is used to approximate the uncertainties, and the adaptive law is designed to ensure the stability of the system. The simulation results show that the proposed controller can achieve better current tracking, with lower tracking error and THD value compared with dynamic surface adaptive fuzzy sliding mode controller; it is more intuitive to show that the proposed method has better ability to eliminate harmonics. In the future, hardware experiments will be conducted on the controller to implement the experimental results.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Science Foundation of China under Grant No. 61873085 and the Natural Science Foundation of Jiangsu Province under Grant No. BK20171198.