Adaptive guaranteed-performance formation analysis and design problems for second-order multi-agent systems are studied, where the global information is not required, which means the main results of this article are fully distributed. First, an adaptive guaranteed-performance formation control protocol is presented for second-order multi-agent systems, where the control input is constructed using neighboring state errors and adaptively adjustable interaction weights. Then, an adaptive guaranteed-performance formation control is proposed based on Riccati inequalities. Furthermore, the guaranteed-performance cost is determined and the adjusting approach of the formation control gain is presented in terms of linear matrix inequalities. Finally, a numerical simulation is provided to demonstrate the effectiveness of the theoretical results.
In the past few years, distributed cooperative control of multi-agent systems has aroused great attention from both scientific and engineering communities.1–6 Multi-agent cooperative control problems in previous works7–17 were solved by consensus-based approach, which requires that the specific state variables of all agents reach an agreement. As an important research topic of cooperative control of multi-agent systems, formation control has been widely applied in transportation, surveillance and rescue, and so on. As a point of fact, formation control problems have been extensively studied during the past decades, and some typical formation control approaches have been proposed, such as leader–follower, virtual structure, and behavior-based ones.18–20 Recently, motivated by the development of consensus theory, the formation control problems were solved by the consensus-based approach as in previous works.21–25
Multi-agent systems in previous works26–28 achieved formation without considering the control performance, however, multi-agent systems in practical tasks are usually required to achieve certain performance, such as the shortest time and the least energy consumption. For example, Xu et al.29 optimized the acceleration control parameters using the particle swarm optimization algorithm to reduce the energy consumption in the multiple robotic fishes’ formation process. The formation performance usually can be modeled as certain cost functions. A quadratic performance function is constructed to achieve guaranteed-performance time-varying formation in Wang et al.30 A cost function was constructed by synchronization errors and control input to describe the formation performance of the multi-agent system in Cheng and Ugrinovskii.31 As a matter of fact, the global information of the multi-agent system is required in Wang et al.30 and Cheng and Ugrinovskii,31 which means their main results are not fully distributed.
A distributed formation control algorithm is proposed for multi-vehicle nonlinear system model with simple kinetics characteristics coupling time-delay and jointly connected topologies in Xue et al.32 and Savkin et al.33 proposed a distributed motion control algorithm for groups of robots. It should be pointed that the formation control results in Xue et al.32 and Savkin et al.33 are fully distributed, while the formation performance was not considered. To the best of our knowledge, fully distributed guaranteed-performance formation control problems for second-order multi-agent systems with adaptive control scheme are still open.
Motivated by the facts stated above, this article investigated adaptive guaranteed-performance formation control for second-order multi-agent systems. First, an adaptive guaranteed-performance formation control protocol is proposed. Then, an adaptive guaranteed-performance formation control criterion is presented based on Riccati inequalities, and the guaranteed-performance cost is determined. Moreover, a formation control gain regulation approach is proposed.
Compared with the related works on formation control of second-order multi-agent systems, the new features of this article are threefold. First, a translation-adaptive strategy is proposed to deal with the fully distributed formation control problems for second-order multi-agent systems. However, the global information is required in Wang et al.30 and Cheng and Ugrinovskii.31 Second, the multi-agent systems in this article can achieve guaranteed-performance formation control, while the formation performance was not considered in Xue et al.32 and Savkin et al.33 Third, the formation control gain regulation strategy is proposed based on linear matrix inequality (LMI) techniques, while the formation control gains in previous works26–28 cannot be adjusted.
The remainder of this article is organized as follows. In section “Problem description,” the problem description and the formation control protocol are proposed. The main results are given under section “Main results.” Section “Numerical simulation” gives numerical simulations. Concluding remarks are presented in the final section.
Notations: let stand for the d-dimension real column vector space and represent the set of dimensional real matrices. For simplicity, let 0 denote zero matrices of any size with zero vector and zero number as special cases. stands for the identity matrix of dimension . represents a column vector of dimension , whose entries are equal to 1. stands for the transpose of the symmetric matrix . and mean that is positive semidefinite and negative semidefinite, respectively. The symbol ⊗ denotes the Kronecker product. The notation * stands for the symmetric terms of a symmetric matrix.
Problem description
Consider a second-order multi-agent system consisting of homogeneous agents, whose dynamics is described as follows
where with . , and are the position state, the velocity state, and the control input of agent , respectively. The interaction topology of multi-agent system (1) can be described by a connected undirected graph , where denotes the set of nodes, denotes the set of edges. In the graph , each node represents an agent in the system. The edge between two nodes represents the interaction relationship between agents, and the length of edge represents the strength of the interaction between agents. stands for the neighboring set of agent . The weight matrix is represented by a symmetric adjacency matrix , where and if agent is not a neighbor of agent and otherwise, with denotes the interaction weight from agent to agent . If , then denotes a virtual interaction weight from agent to agent . with stands for the in-degree matrix of . denotes the Laplacian matrix of . The properties of the Laplacian matrix for an undirected graph are shown in the following lemma.
Lemma 1
Let denote an undirected graph, then its Laplacian matrix has at least nonzero eigenvalue, and the corresponding eigenvector is . If is connected, is a simple eigenvalue of and all the other eigenvalues are positive.34
Definition 1
Multi-agent system (1) is said to achieve consensus if the following conditions are satisfied
where .
Definition 2
For a given vector with , multi-agent system (1) achieves formation if the following conditions are satisfied
where , the vector is called a formation vector.
Let , where with , and . Since , it can be obtained that
and formation control criterion (3) can be rewritten as
Remark 1
When the formation is achieved, it can be obtained by Definition 2 that , which does not mean that the position states of the agents accurately converge to the corresponding formation vector under the formation control protocol. Moreover, if , the formation control criterion (3) can be rewritten as the consensus criterion (2). Therefore, the consensus problem is a special case of formation problem. More generally, by equations (4) and (5), the formation control criterion (3) is written in a form similar to the consensus criterion (2); that is, a formation control problem can be described as a consensus problem.
Definition 3
Multi-agent system (1) is said to achieve adaptive guaranteed-performance formation by protocol (10) if there exist and such that
and for any bounded initial states , where is said to be the guaranteed-performance cost.
The states of second-order multi-agent system (1) include position state and velocity state, so a control input is proposed as follows
with
where and are the control gain matrices. Let , then the control input can be rewritten as
Based on equation (9), a guaranteed-performance formation control protocol of second-order multi-agent system (1) is proposed as follows
where , with is a gain matrix and . It should be pointed out that is constantly positive and adaptively adjusted, and it is consistently increasing unless the states of agent and agent achieve consensus. Let be the upper bound of .
Main results
Let with , then multi-agent system (1) can be described in global form as
where
Let with represent the formation vector of system (11) and with , then .
Due to formation vector being a constant vector, . Since , it can be obtained by equations (9) and (11) that
Since is nonsingular, one can obtain that and are linearly independent. Due to
and
one can see that . Then, it can be obtained that the multi-agent system (1) achieves formation control if and only if .
Theorem 1
For any given translation factor , multi-agent system (1) is said to achieve adaptive guaranteed-performance formation by protocol (10) if there exists a matrix P with such that . In this case, , . The guaranteed-performance cost is
Proof
Design a Lyapunov function candidate as follows
Due to and , it can be shown that . Since, the topologic graph is undirected, one can obtain that is a symmetric matrix. By equation (18), one has
Since is an orthonormal matrix, it can be obtained that , where denotes the Laplacian matrix of a topologic graph and the weight of all the edges of is . From protocol (10) and equation (16), one can show that
Due to , it can be derived that
Then, it means that
If , then one has . Hence, one can obtain that , where is a positive constant.
Thus, ; that is, multi-agent system (1) achieves adaptively guaranteed-performance formation control by protocol (10). In the following, the guaranteed-performance cost is determined.
From Theorem 1, and . can be determined by LMI techniques if and are given.
Introduce a positive constant such that , then one can obtain that if , where denotes maximum eigenvalues of . By LMI techniques, an adaptive guaranteed-performance formation control criterion based on Schur complement Lemma in Boyd et al.35 is proposed as follows.
Corollary 1
For any given , multi-agent system (1) achieves adaptive guaranteed-performance formation by protocol (10) if and there exist and such that
In this case, , and
Corollary 2
If multi-agent system (1) achieves adaptive guaranteed-performance formation by protocol (10), then
Remark 2
The translation-adaptive strategy is proposed in Theorem 1 to solve the guaranteed-performance constraints of the adaptive consensus strategy in Li et al.36 We use the special properties of the Laplacian matrix of the entire topology to achieve eigenvalue translation, which means all eigenvalues equivalent.
Numerical simulation
The following is a numerical simulation example to demonstrate the effectiveness of the theoretical results.
Consider a second-order mobile robot swarms with five agents, which are labeled from 1 to 5. The dynamics of each agent can be described by multi-agent system (1) and
Let , , then it can be obtained that
and
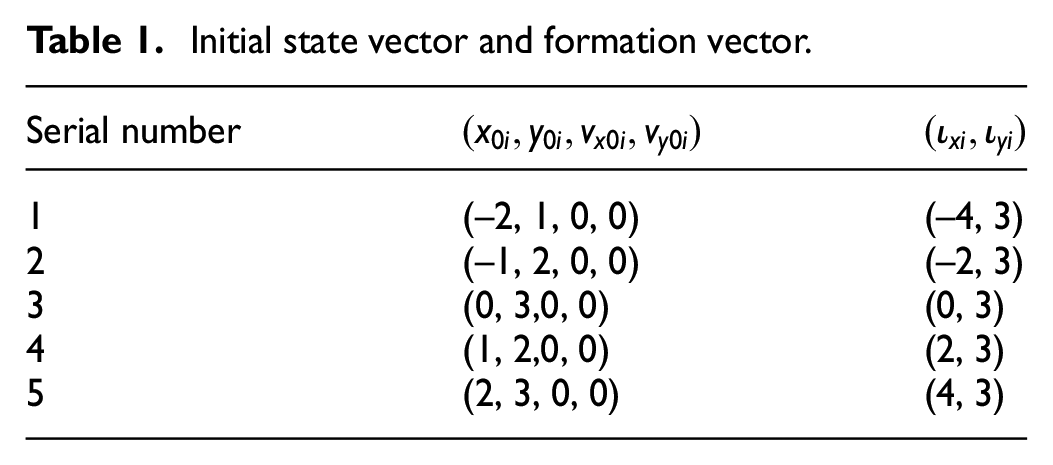
Let with denote the state vector of the ith agent. The initial state vector and formation vector with are shown in Table 1. The interaction topology of the mobile robot swarms is shown in Figure 1. From Definition 2, the second-order mobile robot swarms is said to achieve formation if and only if
and
Initial state vector and formation vector.
Serial number
1
(–2, 1, 0, 0)
(–4, 3)
2
(–1, 2, 0, 0)
(–2, 3)
3
(0, 3,0, 0)
(0, 3)
4
(1, 2,0, 0)
(2, 3)
5
(2, 3, 0, 0)
(4, 3)
Interaction topology of the mobile robot swarms.
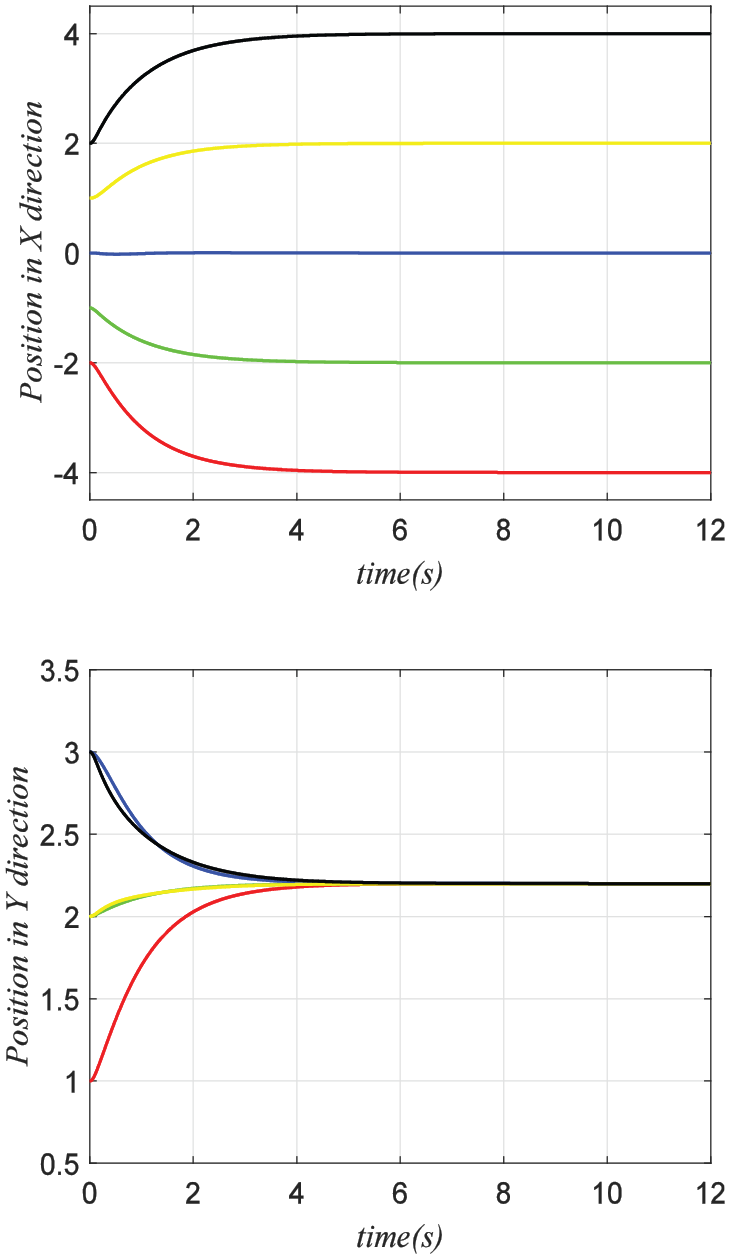
The position state trajectories and velocity state trajectories of the mobile robot swarms are shown in Figures 2 and 3, respectively. One can see that position state trajectory of each agent converges to the corresponding value and the velocity states achieve consensus. Figure 4 shows that the interaction weights among neighboring agents converge to a finite value. Figure 5 shows that the performance function converges to a value less than . Figure 6 depicts the movement tracks of the robot system, one can see that the expected formation of the system is formed by the formation control protocol designed; that is, the system achieves adaptive guaranteed-performance formation control.
Position state trajectories of the mobile robot swarms.
Velocity state trajectories of the mobile robot swarms.
Interaction weights among neighboring agents.
Performance function of the mobile robot swarms.
Movement tracks of the mobile robot swarms.
Conclusion
Adaptive guaranteed-performance formation control problems for second-order multi-agent systems were studied. An adaptive guaranteed-performance formation control strategy is proposed in the current article. The interaction weights of the system can be adaptively adjusted by the designed formation control protocol and the formation control gain can be regulated by choosing some proper translation factors.
Based on this result, it is meaningful to further study the formation control of practical multi-agent systems. Another important research topic is to address the adaptive guaranteed-performance formation control of multi-agent systems with leader-follower structure. For future work, we will focus on the time-varying guaranteed-performance formation control problem with switching topology.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation (NNSF) of China under Grant Nos 61374054, 61503012, 61703411, 61503009, 61333011, and 61421063, in part by the Innovation Foundation of Rocket Force University of Engineering under Grant 2015ZZDJJ03, in part by the Innovation Zone Project under Grant 18-163-11-ZT-004-005-01, and in part by the Scientific Research Project under Grant JJ20172B03058.
ORCID iD
Xueli Xie
References
1.
DuH-BWenG-HChengY-Y, et al. Distributed finite-time cooperative control of multiple high-order nonholonomic mobile robots. IEEE T Neur Net Lear2016; 28: 2998–3006.
JohnsonYDasguptaS. Robust Hurwitz stability and performance analysis of H-infinity controlled forward-velocity dynamics of UAVs in close formation flight using bounded phase conditions in a Kharitonov framework. J Inst Eng India: Series C2014; 95: 223–231.
4.
WangXZhangJ-YZhangD-B, et al. Development of an experiment system for UAV formation flight. Robot2017; 39: 160–166, 175.
5.
ChengY-YDuH-BHeY-G, et al. Distributed finite-time attitude regulation for multiple rigid spacecraft via bounded control. Inform Sci2016; 328: 144–157.
6.
ZhangY-HLiH-YSunJ, et al. Cooperative adaptive event-triggered control for multiagent systems with actuator failures. IEEE T Syst Man Cy A2019; 49: 1759–1768.
7.
XiJ-XWangCLiuH, et al. Completely distributed guaranteed-performance consensualization for high-order multiagent systems with switching topologies. IEEE T Syst Man Cy A2018; 49: 1338–1348.
8.
XiJ-XHeMLiuH, et al. Admissible output consensualization control for singular multi-agent systems with time delays. J Frankl Inst2016; 353: 4074–4090.
9.
TanZ-YCaiNZhouJ, et al. On performance of peer review for academic journals: analysis based on distributed parallel system. IEEE Access2019; 7: 19024–19032.
10.
XiJ-XWangCYangX-G, et al. Limited-budget output consensus for descriptor multiagent systems with energy constraints. IEEE T Cybernetics2019, http://arxiv.org/abs/1909.08345
11.
CaiNHeMWuQ-X, et al. On almost controllability of dynamical complex networks with noises. J Syst Sci Complex2019; 32: 1125–1139.
12.
XiJ-XFanZ-LLiuH, et al. Guaranteed-cost consensus for multiagent networks with Lipschitz nonlinear dynamics and switching topologies. Int J Robust Nonlin2018; 28: 2841–2852.
13.
MaH-YJiaXCaiN, et al. Adaptive guaranteed-performance consensus control for multi-agent systems with an adjustable convergence speed. Discrete Dyn Nat Soc2019; 2019: 5190301.
14.
JiZ-JYuH-S. A new perspective to graphical characterization of multiagent controllability. IEEE T Cybernetics2016; 47: 1471–1483.
15.
LiuX-ZJiZ-JHouT. Stabilization of heterogeneous multiagent systems via harmonic control. Complexity2018; 2018: 8265637.
16.
ZhangY-HSunJLiangH-J, et al. Event-triggered adaptive tracking control for multiagent systems with unknown disturbances. IEEE T Cybernetics. Epub ahead of print 27September2018. DOI: 10.1109/TCYB.2018.2869084
17.
YangX-JYuW-ZWangR, et al. Fast spectral clustering learning with hierarchical bipartite graph for large-scale data. Pattern Recogn Lett. Epub ahead of print 22June2018. DOI: 10.1016/j.patrec.2018.06.024
18.
ConsoliniLMorbidiFPrattichizzoD, et al. Leader-follower formation control of nonholonomic mobile robots with input constraints. Automatica2008; 44: 1343–1349.
19.
BalchTArkinRC. Behavior-based formation control for multirobot teams. IEEE T Robotic Autom1998; 14: 926–939.
20.
LewisMATanK-H. High precision formation control of mobile robots using virtual structures. Auton Robots1997; 4: 387–403.
21.
LiuHMaTLewisFL, et al. Robust formation control for multiple quadrotors with nonlinearities and disturbances. IEEE T Cybernetics. Epub ahead of print 25October2018. DOI: 10.1109/TCYB.2018.2875559
22.
ThunbergJGoncalvesJHuX-M. Consensus and formation control on SE (3) for switching topologies. Automatica2016; 66: 109–121.
23.
PengZ-XWenG-GRahmaniA, et al. Distributed consensus-based formation control for multiple nonholonomic mobile robots with a specified reference trajectory. Int J Syst Sci2015; 46: 1447–1457.
24.
Cepeda-GomezROlgacN. Stability of formation control using a consensus protocol under directed communications with two time delays and delay scheduling. Int J Syst Sci2016; 47: 433–449.
25.
WangZLiuG-BXiJ-X, et al. Guaranteed cost formation control for multi-agent systems: consensus approach. In: Proceedings of the 2015 34th Chinese control conference (CCC), Hangzhou, China, 28–30 July 2015, pp.7309–7314. New York: IEEE.
26.
ChengLWangH-LHouZ-G, et al. Reaching a consensus in networks of high-order integral agents under switching directed topologies. Int J Syst Sci2016; 47: 1966–1981.
27.
HuW-FLiuLFengG. Output consensus of heterogeneous linear multi-agent systems by distributed event-triggered/self-triggered strategy. IEEE T Cybernetics2016; 47: 1914–1924.
28.
ChengY-YJiaR-TDuH, et al. Robust finite-time consensus formation control for multiple nonholonomic wheeled mobile robots via output feedback. Int J Robust Nonlin2018; 28: 2082–2096.
29.
XuDYuLLvZ, et al. Energy consumption optimization for the formation of multiple robotic fishes using particle swarm optimization. Energies2018; 11: 082023.
30.
WangLXiJ-XHeM, et al. Robust time-varying formation design for multi-agent systems with disturbances: extended-state-observer method. Int J Robust Nonlin2019, https://arxiv.org/abs/1909.08974
31.
ChengYUgrinovskiiVA. Guaranteed performance leader-follower control for multi-agent systems with linear IQC coupling. In: Proceedings of the 2013 American control conference, Washington, DC, 17–19 June 2013, pp.2625–2630. New York: IEEE.
32.
XueR-BSongJ-MZhangM-Q, et al. Research on distributed multi-vehicle coordinated formation flight control with coupling time-delay and jointly-connected topologies. Acta Armamentarii2015; 36: 492–502.
33.
SavkinAVWangCBaranzadehA, et al. Distributed formation building algorithms for groups of wheeled mobile robots. Robot Auton Syst2016; 75: 463–474.
BoydSGhaouiLFeronE, et al. Linear matrix inequalities in system and control theory. Philadelphia, PA: Siam, 1994.
36.
LiZ-KWenG-HDuanZ-S, et al. Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs. IEEE T Automat Contr2014; 60: 1152–1157.