
Abstract
Membrane space structures have received widespread attention because of their small packaging volume and low mass. However, because membranes are very flexible and lightly damped, vibration suppression in membrane structures is very difficult. The objective of this study was to solve this problem. The first part of this article describes the influence of wrinkling in a membrane structure on the structure’s vibration characteristics. On this basis, the vibration deformations of a wrinkled square membrane structure were derived from the dynamic equations, and the correctness of this vibration model was verified by numerical simulation and experiment. A multi-model system is proposed to simulate the dynamic response of a membrane structure under different boundary conditions. In combination with the drive system, a multi-model switching control method based on adaptive and proportional–integral–derivative control is proposed. Under the initial disturbance, when the vibration amplitude dropped below 0.01 mm, the vibration duration was reduced to 2.96 s, compared with the duration of 12.37 s without control. The duration was shortened by approximately 39.7%, compared with the duration of 4.91 s achieved by the traditional proportional–integral–derivative control method, and by approximately 15.9% compared with the 3.52 s achieved by the out-plane control method. When there were multiple disturbances and the proposed method was used, the boundary displacement loadings did not increase when a certain value was exceeded. This prevented the breaking of the membrane by overstretching and provides a theoretical foundation for setting the initial pre-stress values.
Introduction
Membrane enables the development of ultra-lightweight and extremely large space structures, such as solar sails, large reflectors, solar arrays, and membrane mirrors, which are used in innovative space missions. 1 Surface accuracy and structural stability are two significant factors that affect the performance of membrane structures. However, the inherent flexibility of membrane structures is detrimental to the in-orbit stability and maneuverability,2,3 and the vibration duration after a disturbance in space is longer because of the air-free environment. Therefore, an effective control method is needed for the effective and rapid suppression of vibration.
To develop a vibration model, He et al. 4 considered a flexible robotic manipulator as a concise spring–mass system. Liu et al.5,6 studied the nonlinear dynamic response of orthotropic membranes under an impact load by analytical and numerical approaches. Li et al. 7 studied the dynamic response of a pre-stressed orthotropic circular membrane under an impact load based on the principle of virtual displacement and solved by the Krylov–Bogoliubov–Mitropolsky perturbation method. However, for a membrane structure, wrinkling is a ubiquitous phenomenon that affects the vibration characteristics. 8 Therefore, in dynamic modeling, the wrinkling information must be considered. Fang et al. 9 used the distributed transfer function (DTF) method to predict the structural natural frequencies and mode shapes of an 8 m membrane reflecting antenna. The in-plane wrinkling shape and natural vibration characteristics were analyzed by Kukathasan and Pellegrino 10 using the iterative membrane properties (IMP) method. The dynamic analysis of a partially wrinkled annular and three-sided membrane has been presented by Hossain et al.11,12 and the penalty parameter modified material (PPMM) model, which has been previously introduced by Liu et al., 13 was used in ABAQUS to investigate how wrinkling affects the transverse vibration behavior. Then the stress distribution of the wrinkled membrane structure obtained by the nonlinear buckling finite element method (FEM) was introduced into the modal analysis to predict the natural vibration frequencies and modes. 14 This study used modal analysis to establish the vibration model and estimate the vibration deformations of a partially wrinkled planar membrane structure.
General control methods can be broadly characterized as passive, active, semi-active, and hybrid.
15
For active vibration suppression, some modern techniques are studied. Gasteratos
16
designed a fuzzy-gray controller, David et al.
17
designed a fractional-order proportional–integral–derivative (PID) controller, and Zhao et al.
18
presented a novel adaptive neural network based on sliding mode control strategy for image stabilization systems. In the field of the dynamic control of membranous structures, Renno et al.
19
investigated nonlinear control techniques for a one-dimensional membrane strip with an attached piezoelectric ceramic transducer (PZT) bimorph. Subsequently, Ruggiero and Inman
20
designed a linear quadratic (LQ) regulator control system using distributed bimorph actuators to eliminate any detrimental vibration of the membrane mirror. Ferhat and Sultan
21
investigated the LQ regulator using variational-based solutions for the second-order form of a membrane structure. Liu et al.
22
designed a
In our previous study, 28 static analysis of wrinkled membrane structures was made, and a wrinkle-wave model was proposed to more accurately describe the wrinkling details. In the dynamic analysis presented in this article, the wrinkle shapes were considered as the initial state, which is the vibration equilibrium position. Moreover, considering the influence of wrinkling on the structural natural frequencies and mode shapes, a multi-model vibration system for a wrinkled square membrane structure was established to approximate the dynamic response under different boundary conditions. The proposed multi-model switching control method based on adaptive and PID control can effectively and rapidly suppress the vibration by adjusting the boundary displacement loadings without attaching extra actuators to the membrane. The correctness and effectiveness of the method were verified by nonlinear finite element simulations and experimental measurements. Moreover, the results obtained by this study provided a theoretical foundation for setting the initial pre-stress values.
Dynamic analysis
Solar sails are typical planar membrane structures, wherein a square membrane is stressed by two pairs of equal and opposite displacement loadings VX, and VY, with side length L. 29 It is assumed that the membrane is isotropic with Young’s modulus E and Poisson’s ratio v, and that the constitutive material is linearly elastic. 29
Vibration model for wrinkled membrane structure
Without considering the external disturbance and external damping, the bending deformation potential energy of a membrane structure with local wrinkles can be expressed as follows 30

where
The strain potential energy of the membrane structure is expressed as follows

where
The kinetic energy of free vibration is

where ρ is the density of the membrane.
The vibration deformation

By substituting equation (4) into equations (1) and (2), we can obtain the total potential energy, as follows

By substituting equation (4) into equation (3), we obtain the following relationship

where




According to the Lagrange equation, the following relationship holds

The differential equation of the nonlinear vibration can be obtained as follows

To simplify the design of the controller, the third part in equation (8) was ignored. Then, the simplified nonlinear vibration equation can be derived in matrix form as follows

where

where
However, along with the change in the displacement loadings, the wrinkle shape, structural natural frequencies, and mode shapes undergo obvious change, and it is difficult to derive the analytic expression for the large deformation stiffness matrix
The solutions of equation (9) can be written as

where ω is a group of natural frequencies

Mode shape of the first mode.
Control-oriented dynamic modeling
The degrees of freedom are denoted by n, the number of inputs is denoted by r, and the number of outputs is denoted by s. By considering the external disturbance and external damping, the dynamic equation in nodal coordinates can be expressed as follows

where
By transforming the system to modal coordinates, a modal displacement matrix

where
Then the dynamic equation in modal coordinates can be obtained by multiplying the left side by

where the modal mass matrix

where
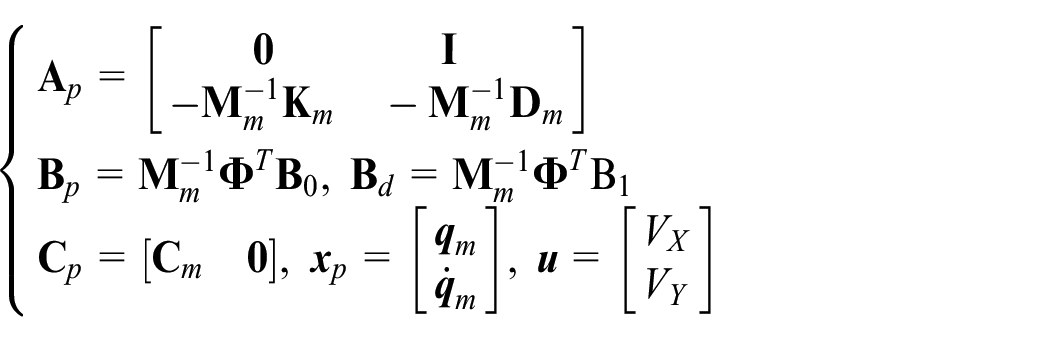
The state-space expression of the vibration model can be expressed as follows

where
Generally, the natural frequencies and mode shapes can be obtained using modal analysis. Then, the dynamic model in modal coordinates can be constructed. However, for a flexible membrane structure, wrinkling certainly affects the vibration characteristics. In the first case, the wrinkling details should be obtained using the nonlinear buckling FEM. Subsequently, the wrinkling results should be introduced to modal analysis. 14 Thus, the natural frequencies and mode shapes of the wrinkled model can be extracted.
To obtain more accurate results, this study used 10,000 elements.
28
Because the order of the above-mentioned vibration model in equation (15) is very high, an immense amount of computational work is required, which in turn makes it difficult to design the controller. Hence, model reduction is necessary. The modal cost analysis method is simple and effective method and is widely used in the order reduction of flexible structures.
32
The mode energies

where the modal mass matrix
The mode energy contribution ratio

As shown in Figure 2, the sum of the kinetic energy for the first six modes accounts for approximately 90% of the total energy. Then, a dimensionally reduced model can be obtained by retaining the first six modes.

Kinetic energy ratios of the first 15 modes.
Transient analysis
The disturbance point is shown in Figure 3(a). To simulate the dynamic response, an impulse displacement of amplitude of 4 mm was applied for 0.02 s.

Vibration curve: (a) square membrane model, (b) vibration curves on the diagonal line
The parameters of the membrane structure are listed in Table 1. Twenty-one points distributed on the diagonal line
Membrane structure parameters.

By maintaining

Vibration curve with large wrinkles: (a) wrinkle shape and (b) vibration curve at point P.
Multiple-model switching controller design
The natural frequencies and mode shapes change with the boundary loadings applied to the membrane structure, which leads to changes in the vibration model. Thus, more than one model must be established to approximate the dynamic performance of the system under different displacement loadings. It is assumed that the tension is in the range of 0.1–1.8 mm, such that
Drive system
A voice coil motor (VCM)
33
was used as the actuator because of its small size and high-response speed. The equivalent circuit diagram of the coil circuit is shown in Figure 5. Here,

where

Equivalent circuit diagram.
The voltage balance equation is derived as follows

The inertial force of the electromagnetic force that overcomes the mover is expressed as follows

where
Let

The transfer function between the input voltage and the output displacement can be obtained as follows
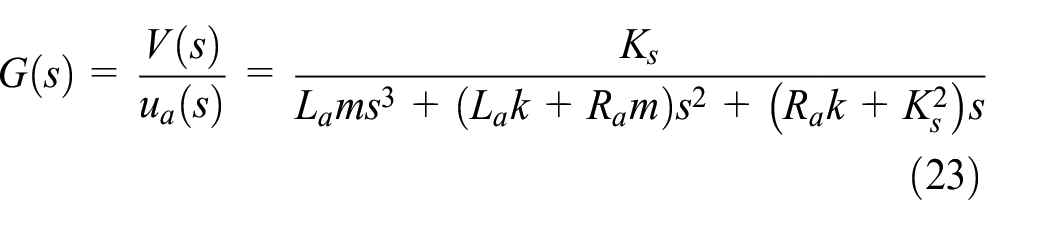
By combining the vibration sub-models (equation (16)) and the drive model (equation (23)), we can obtain the multiple-model dynamic system with the state-space matrices
Model reference adaptive control
The control objective is to make the system output

where

In the above extension model, the system output

The LQ regulator is used to obtain the optimal gain matrix
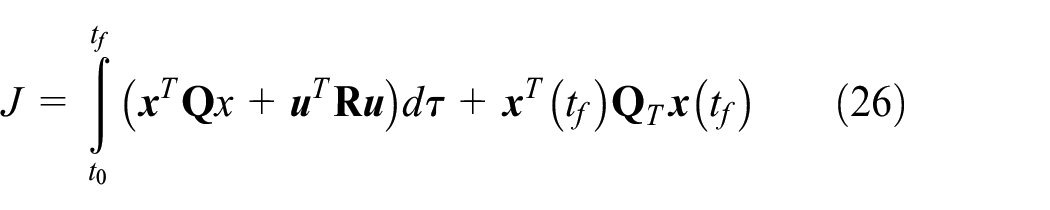
where

where

By substituting equation (27) into equation (25), we can obtain the reference model system, as follows

Then, we can rewrite the system dynamic equation (23), as follows

The tracking error of the states is defined as follows

To achieve the tracking objective, that is,

where
The standard adaptive law based on the gradient algorithm is expressed as follows

where
Proof
Consider the following Lyapunov function

In combination with equation (25), we can obtain the following expression

Therefore, the condition for Lyapunov stability is satisfied.
PID-model reference adaptive control system
The dynamic system consists of 13 vibration sub-models and different reference models were designed for the different sub-models. Before outputting the control signal

where
These two controllers constitute a multi-model switching PID-model reference adaptive control (MRAC) system. Figure 6 shows the flowchart of the system, and Figure 7 shows the block diagram of the PID-MRAC system. The third part of equation (8) is ignored when designing the controller; however, the nonlinear term was added in the dynamic model.

System flowchart.

Block diagram of the PID-MRAC control system.
The control signal

where
Experiment
Experimental design
Figure 8(a) shows a square membrane made of Kapton. As can be seen in the enlarged local drawing, the vertex was connected to a force sensor with a cable, which was used to obtain initial pre-stress values and monitor the force. A carbon fiber material was chosen for the cable. Because this material has Young’s modulus of 193 GPa, the elastic deformation can be ignored. The tensions were adjusted by two servo VCM actuators. When the VCM in the X-direction moved by 1 mm, which is similar to a pair of equal and opposite displacement loadings,

Experimental system: (a) experimental system and (b) block diagram of experimental system.
Results under initial disturbance
The vibration curves at the central point under the same disturbance with

Vibration curve at the central point without control.
Both the traditional PID control method and the PID-MRAC method were applied to the dynamic vibration system. Figure 10 shows the vibration curves, and it can be seen that the vibration was adequately suppressed. When the vibration amplitude dropped below 0.01 mm, the vibration duration without control was approximately 12.37 s; this was reduced to approximately 2.96 s with the PID-MRAC method, while it required approximately 4.91 s with the traditional PID control method alone. Combined with the enlarged local drawing shown in Figure 10, we concluded that the proposed PID-MRAC method is more effective in suppressing vibration compared with the traditional PID control method.

Vibration curve at the central point.
Figure 11(a) shows the relative position of the VCM. The displacements

Control inputs: (a) relative position of VCM, (b) absolute displacement loadings, and (c) forces applied to the membrane.
The proposed method is an in-plane control method. The method proposed by Ferhat and Sultan 21 attached the actuators to the membrane is thus an out-of-plane control method. As shown in Figure 12(a), two actuators were attached to the corners of the membrane, and an adaptive controller was designed for the multi-model vibration system. Figure 12(b) shows the vibration curves, and these indicate that the vibration displacement was smaller with the in-plane control method. In addition, the partially enlarged drawing shows that the vibration duration was approximately 3.52 s with the out-of-plane control method, which amounts to a lengthening of approximately 15.9% compared with the duration obtained by the proposed method. In space, the vibration duration after the disturbance will be longer, because of the air-free environment, the effectiveness of the proposed method will therefore be greater. Moreover, attaching the actuators directly to the membrane can change the local vibration characteristics, and this cannot be ignored in engineering applications.

Vibration curve obtained using out-of-plane control method: (a) out-of-plane control method and (b) vibration curve at central point.
Results under multiple disturbances
As can be seen in Figure 11(b), the final steady-state displacement loading was about 0.86 mm. New disturbances were then applied to the structure after the initial disturbance. The absolute displacement loadings

Absolute displacement loadings under multiple disturbances.

Vibration curves with multiple disturbances: (a) vibration curve under second and third disturbances and (b) vibration curve under fourth and fifth disturbances.
Conclusion
A dimension reduction multi-model vibration system that accounted for the influence of wrinkles was developed to estimate the dynamic characteristics of a membrane structure. A multi-model switching approach based on adaptive control and PID control is also proposed to effectively and rapidly suppress the vibration. A comparison of the analytical, numerical, and experimental results verified the validity of the proposed vibration model. The preceding discussion outlines the effectiveness of the vibration suppression achieved by adjusting the boundary displacement loadings without attaching actuators directly to the membrane surface.
The main conclusions drawn from this study can be summarized as follows:
Wrinkling information was introduced during dynamic modeling, and a control-oriented multi-model vibration system was established. This model reflected the vibration characteristics and propagation regularity of a planar membrane structure with local wrinkles.
An in-plane control method was proposed, and a PID-MRAC system was designed. The vibration of the membrane was effectively suppressed without attaching extra actuators to the surface of the membrane, and the maximum vibration deformation was reduced by adjusting the boundary displacement loadings.
An experimental system was designed to verify the effectiveness of the proposed method. Under the initial disturbance, the vibration duration with the PID-MRAC method was reduced to 2.96 s, which amounts to a shortening of approximately 39.7% compared with the traditional PID control method, and approximately 15.9% compared with the out-of-plane control method. With multiple disturbances, the vibration was effectively suppressed within 3 s, and the boundary displacement loadings did not increase when a certain value was exceeded. This prevented the membrane from breaking by overstretching and provides a theoretical foundation for setting the initial pre-stress values.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The project was supported by the Natural Science Basic Research Plan in Shaanxi province of China (program no. 2019JQ-179). Scientific research program was funded by Shaanxi Provincial Education Department of China (program no. 19JK0034).