
Abstract
Bolted joints are elements used to create resistant assemblies in the mechanical system, whose overall performance is greatly affected by joints’ contact stiffness. Most of the researches on contact stiffness are based on certainty theory whereas in real applications the uncertainty characterizes the parameters such as fractal dimension D and fractal roughness parameter G. This article presents an interval estimation theory to obtain the stiffness of bolted joints affected by uncertain parameters. Topography of the contact surface is fractal featured and determined by fractal parameters. Joint stiffness model is built based on the fractal geometry theory and contact mechanics. Topography of the contact surface of bolted joints is measured to obtain the interval of uncertain fractal parameters. Equations with interval parameters are solved to acquire the interval of contact stiffness using the Chebyshev interval method. The relationship between the interval of contact stiffness and the uncertain parameters, that is, fractal dimension D, fractal roughness parameter G, and normal pressure, can be obtained. The presented model can be used to estimate the interval of stiffness for bolted joints in the mechanical systems. The results can provide theoretical reference for the reliability design of bolted joints.
Introduction
Accounting for up to 50% of the total stiffness of the mechanical system, the stiffness of bolted joint can affect the overall performance of systems. 1 Some models of bolted joint based on the certainty theory have been presented to study the characteristics of joints.2–4 However, uncertainty exists in parameters such as the fractal dimension, fractal roughness parameters, and bolt pre-tightening force. Machining error and measurements make fractal dimension and fractal roughness uncertain. The certainty theory may result in a bigger error when the number of uncertain parameters is raised or the uncertainty range increased. Therefore, establishing a consistent theoretical background and modeling is necessary for predicting the stiffness of the bolted joints accurately.
Fractal contact theory has been widely applied to the analysis of the joint surface problems for the self-similarity and self-affinity of machined surfaces. A Majumdar and CL Tien 5 gave a fractal representation of the roughness surface using the Weierstrass–Mandelbrot (W-M) function 6 which defined a roughness surface through fractal parameters, that is, fractal dimension D and fractal roughness parameter G. A Majumdar and B Bhushan 7 first presented a fractal contact model (Majumdar–Bhushan (M-B) model) of elastic and plastic contact of rough surface with scale independence. Through the model, the total real contact area and the normal load based on the two-dimensional W-M function and Hertz theory are calculated. Further research, based on the Hertz contact theory and capacity dissipation theory, improved this method for calculating the contact stiffness and damping. S Wang and K Komvopoulos 8 presented an improved size-distribution function of the micro-contact spot with a domain extension factor ψ and divided the contact deformation of the asperity into three stages, that is, the totally elastic stage, the elastic–plastic stage, and the totally plastic stage. W Yan and K Komvopoulos 9 presented a more accurate model about the contact of the three-dimensional anisotropic fractal surface for calculating the real contact area and the total normal load. In addition, the stiffness of the bolted joint can be obtained by testing of static loading deformation, 10 and Daisuke et al. 11 introduced this method to approximately solve the contact stiffness by the fitting method. They applied the stiffness parameter to finite element model (FEM) analysis of a machine tool, in which the results show that the FEM with the contact stiffness is considered to be closed for the machine–foundation interface. You and Chen 12 presented that the simulation of the joint surface with the detailed division is closer to the practical surface. Zhao et al. 13 presented a nonlinear virtual material method based on surface contact stress to describe the bolted joint for accurate dynamic performance analysis of the bolted assembly. R Grzejda 14 put forward a thesis that modeling dissymmetric nonlinear multi-bolted connections as a system is possible. The model which can be applied to determine the changes in bolt forces, as well as in the normal contact pressure between the joined elements during the tightening of the system and at its end, was presented. In the traditional stiffness model based on fractal contact theory, the researchers assumed that the fractal dimension, fractal roughness parameters, and bolt pre-tightening force are considered as the certainty parameters. Actually, many uncertainties are inherent in loads, geometry, and manufacturing tolerance.
In recent years, more and more attention has been paid to the uncertainty of engineering problem.15,16 Many uncertain parameters such as external load, material characteristics, and machining error in the actual bolted joint exist. All these external uncertainties can vary micro-fractal parameters, and the uncertain parameters lead to the change of system’s characteristics. 17 Bifurcation will takes place in nonlinear systems even the effect parameters small and slow variation, thus the uncertainty of stiffness of bolted joints needs to be investigated.
The numerical algorithm of the uncertainty problem mainly contains the probability method, the fuzzy algorithm, and the interval algorithm. Probability algorithm has been widely used to deal with many uncertainty problems.18,19 The probability method assumes that the distribution information of uncertain parameters is known; however, in practical problems, the distribution function of the parameters is difficult to obtain and the application of the method is thus limited. Fuzzy algorithm 20 is another kind of uncertainty analysis method that studies the phenomenon of uncertainty arising from the fuzziness of the concept, using the membership degree to describe the nature of this kind of uncertainty. Fuzzy mathematics is mainly used in pattern recognition, clustering analysis, comprehensive evaluation, mathematical logic, and decision-making. Recently, the fuzzy theory has been used to solve the fuzzy differential equations.21,22
Interval method based on the set theory belongs to the non-probabilistic methods. In recent years, this method has drawn much attention in the field of uncertainty analysis and design.23,24 Interval variables are used to represent upper and lower bounds of the uncertain-but-bounded parameters. The interval model makes it possible to measure uncertainties for bounded parameters being the complete information of the system unknown. The determination of lower and upper bounds for uncertain parameters is much easier than the identification of a precise probability distribution. However, the main shortcoming of this method is the relatively overestimation caused by the wrapping effect. 25 Therefore, how to effectively control the overestimation is the key to the interval arithmetic. Several interval methods have been applied to solve wrapping effect;26,27 interval Taylor series and Taylor model28,29 methods are the two typical methods. This method uses the high-order Taylor series expansion to approximate the true solution, but it is limited to the problem with a lower level of uncertainties. Compared with the Taylor method, the Chebyshev series method 30 can approximate the true solution, through which higher numerical accuracy can be achieved. Moreover, the Chebyshev inclusion function can effectively control the overestimation effect.
Studies of bolted joints concerning the uncertainty are still only a few. M Hanss et al. 31 considered the eigenfrequency and the damping ratio as fuzzy numbers and used the transformation method to get the uncertain stiffness and damping. QT Guo and LM Zhang 32 implied that joint parameters of some structures have normal or nearly normal distributions, and linear FEM with probabilistic variable could illustrate the dynamic characteristics of joints. N Norrick 33 focuses on the bolted joints between the main drive train gears and cylinders and shows how the statistical consideration of uncertainties enables us to design these joints. A failure probability for a specific gear-cylinder connection is calculated by considering statistical information gained from experimental data and using the Monte Carlo method. In the study by D Jiang et al., 34 based on the theory of thin layer element, a parameter identification method for the uncertainty of bolted contact surface is proposed. The uncertainty FEM correction theory–based perturbation is used to identify the contact surface parameters. Seibel et al. 35 introduced closed-form symbolic expressions for the possibility distributions of the coefficients of friction during the tightening process of bolted joints. This relieves the engineer from the burden of propagating the uncertainties through the computations to obtain the uncertain output. N Imamovic and M Hanafi 36 investigated the uncertainty quantification of bolted joint beams, and the frequency response functions (FRFs) were measured in high-frequency range for all beams under varying conditions of torque applied to bolts in the structural joints. Roughness of surfaces that are in contact at structural joints is measured and considered as a source of uncertainty, with a discussion of characterization of bolted joint as a deterministic or stochastic model. The model is validated by comparing predicted and measured FRFs. However, these studies only focused on the uncertainty of macroscopic stiffness and damping and could not establish the relationship between microscopic uncertainty and macroscopic characteristic of the bolted joints.
This article combines the fractal theory and the Chebyshev interval method to estimate the contact stiffness of bolted joint with uncertain parameters. The fractal dimension and fractal roughness parameter are considered as the uncertain parameters. These fractal uncertain characteristic parameters are determined by the power spectrum method. Interval models of uncertain parameters are introduced to the fractal model and the equations are solved through the Chebyshev interval method. Normal and tangential stiffness are calculated based on the fractal model in microscale, whereas the upper and lower boundaries of the normal and tangential stiffness are determined through the Chebyshev interval method. The relationship between stiffness interval, fractal dimension, fractal roughness parameter, and the normal pressure can be obtained. The presented method can be used to determine the upper and lower boundaries of the stiffness affected by uncertain parameters. The result can provide a theoretical basis for improving the reliability of the systems with bolted joints.
Mechanism of the three-dimensional fractal contact model
Fractal theory is used to describe the geometric features of contact surfaces, which provides a method of describing asperities with a wide range of size. The fractal rough surface profile is expressed by W-M function

where z is the surface height, x denotes the transverse distance, L is the length of a fractal sample, G is the fractal roughness parameter, D is the fractal dimension (1 < D < 2), γ = 1.5 is the scaling parameter, and ϕ1n is the random phase.
It is assumed that the rough surfaces are isotropic, and the fractal dimension D and roughness parameter G remain unchanged during the contact process. For microscale, the asperities of two rough surfaces are actually squeezed each other, as shown in Figure 1. The two rough surfaces in contact can be simplified as a rigid smooth surface and an equivalent rough surface. The equivalent roughness surface is characterized by an equivalent elastic.

Contact deformation of the single micro-convex body.
The contact surface is formed of micro-convex bodies whose deformation is divided into elastic deformation and plastic deformation stages. The deformation stage is determined from critical deformation and critical cross-sectional area. For a single micro-convex body, the radius of curvature of R and normal deformation can be expressed by combining the surface fractal parameters, that is, fractal dimension D and surface roughness parameter G


where a is the cross-sectional area of a single micro-convex body; r is the cross-sectional area of the micro-convex body,
The critical deformation δc and the critical truncated area ac of the single asperity for demarcating the elastic and elastic–plastic regimes are given by


where H is the hardness of the soft material which can be obtained from the relationship with yield stress Y as H = 2.8Y; ν1, ν2, E1, and E2 are the Poisson ratio and elastic modulus of two contacting surfaces, respectively, and k = 0.454 + 0.41ν is the coefficient related with the Poisson ratio.
The three-dimensional size-distribution function can be written as

Total real contact area and load
According to the fractal theory, when ac < a < al, the contact surface micro-convex bodies are in the elastic deformation stage, and the total real elastic contact area Are can be obtained by integrating the distribution function of micro-convex cross-sectional area in the elastic deformation area
When 0 < a < ac, the contact surface micro-convex bodies are in the plastic deformation stage, and the total real plastic contact area Arp can be obtained by integrating the distribution function of micro-convex cross-sectional area in the plastic deformation area

According to the above equations, the total real contact area is

The normal load of the joint surface is the connection point between macroscopic mechanical properties and microscopic fractal theory model. The three-dimensional fractal theory and the micro-convex body size-distribution function are combined to establish the total normal load of the elastic and plastic deformation stage.
The elastic and plastic loads of a single micro-convex body are obtained based on the Hertz theory

where Fe is the elastic load and Fp is the plastic load of a micro-convex body.
The total elastic contact load and plastic contact load of the joint surface can be expressed as

Then the total normal load P is

Assuming the pressure distribution is uniform, the equivalent pressure of joint surface can be expressed as

Normal and tangential stiffness model of joint surface
Normal stiffness of joint surface
Based on the Hertz theory, the normal stiffness of a single micro-convex body can be expressed as

The normal stiffness of joint surface can be obtained by integrating kn in the elastic deformation region

When the stiffness of plastic deformation is zero, the total stiffness model is described as

Tangential stiffness of joint surface
According to the former research, 9 the tangential deformation of a single micro-convex body can be written as

where p is the normal load of the single convex body; when the micro-convex body is in the elastic deformation stage, p = Fe; when the micro-convex body is in the plastic deformation stage, p = Fp; t is the tangential load of a single convex body, G′ is the equivalent shear modulus of the contacting material, 1/G′ = (2 – ν1)/G1 + (2 – ν2)/G2. μ is the contact surface friction factor and r is the radius of real contact area.
The tangential stiffness of single convex body can be expressed as kt = dt/dδt, and the tangential stiffness can be obtained by the integration of kt in the elastic deformation region

The ratio of normal load and tangential load to a single micro-convex body t/p = T/P is satisfied, where T is total tangential stiffness of joint surface and T = τbAr; τb is the shear strength of soft material.
To sum up, the total tangential stiffness of joint surface Kt can be expressed as follows

Uncertainty parameters of the bolted joints
In traditional fractal contact theory, the researchers assume the fractal dimension, fractal roughness parameter, and bolt pre-tightening force as certain parameters. However, all of these parameters are uncertain due to machining error, finishing, measurements, and external load. In this section, the fractal uncertainty parameters will be discussed and determined by experimental measurements and the power spectrum method.
The uncertain parameters D and G
Based on the derivation above (section “Mechanism of the three-dimensional fractal contact model”), the fractal dimension D and surface roughness parameter G significantly affect the stiffness of bolted joints. Most of the scholars studied the characteristics of a joint surface based on the certainty theory, where D and G are considered to be determined values. However, D and G are uncertain due to the above reasons so, in this section, the uncertainty of D and G is quantified.
To obtain the uncertainty of parameters D and G, three specimens were taken as an example and measured, and all the values of roughness are 1.6 when they are finished. The specimens were machined and treated according to these three methods: milling only, grinding only, and heat-treatment grinding . Each surface was measured at three different locations, as shown in Figure 2. And the two-dimensional surface profile of the three specimens which processed with different processing methods is shown in Figure 3. Based on the power spectrum density method, the fractal dimension and fractal roughness parameter of contact surface can be obtained for each sample. The power spectrum of the contact surface is shown in Figure 4.

Sample and measuring positions.

The surface profile.

The power spectrum of the contact surface.
Based on the power spectrum density method, the fractal dimension and fractal roughness parameter of contact surface are obtained, and their values are listed in Table 1. Different processing techniques lead to different values of the parameters, even though roughness was set to the same value before processing.
Parameters’ value of the contact surface processed by different methods.

The variation ratio of D is 0.6%, big enough to be regarded as an interval containing all the possible values instead of considering it as a determined value. Fractal roughness parameter G changes in a rather big field with a variation ratio of 78.3%, which means that regarding it as a certain number can lead to big errors in the estimation of contact stiffness.
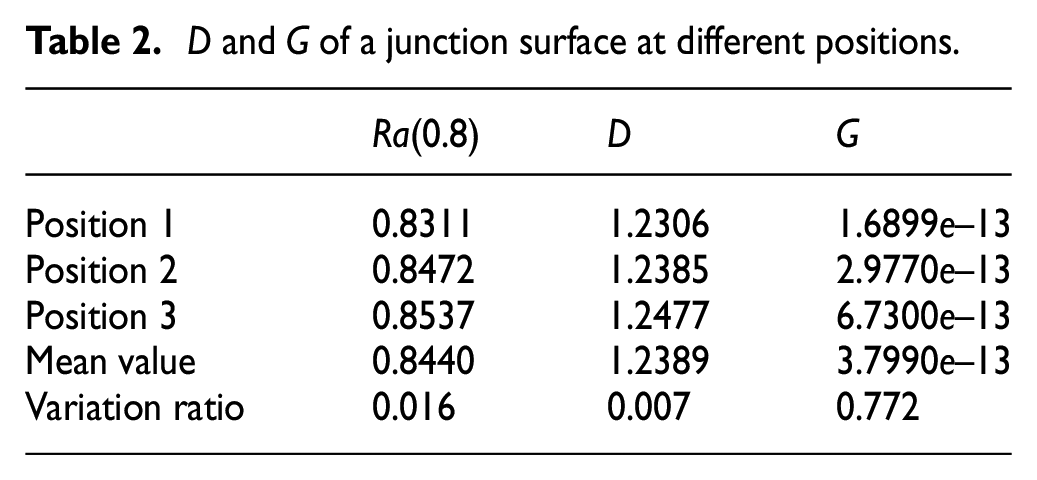
For the same junction surface whose roughness is 0.8, the surface profile (see Figure 2) was tested at different positions. Also, in this case, the parameters listed in Table 2 change within a certain range. From Table 2, it is observed that the variation ratio of D is 0.7%, and fractal roughness parameter G changes in a rather big field with a variation ratio of 77.2%, which means that regarding them as certain numbers can lead to big errors in the estimation of contact stiffness. Even if the measurements are taken at different locations for the same surface, the resulting D and G are not deterministic, and fluctuation ranges cannot be ignored.
D and G of a junction surface at different positions.
Uncertainty of bolted joints using interval parameters
Due to the high number of uncertain parameters in bolted joints, traditional probabilistic models for the distribution information are not suitable to describe the uncertainty whereas the bound of the parameters can be easily obtained based on the above analysis. It proved that parameter uncertainties of bolted joints can be mathematically described through interval variables. Interval variables are used to represent upper and lower bounds of the uncertain-but-bounded parameters. In the fractal model of bolted joint, the upper and lower bounds of the uncertain parameters are obtained in the following.
The basic definitions of interval arithmetic
The uncertain parameter can be expressed by a real interval set

where
Define the midpoint of

Define the radius of

Express the width of

Therefore, the interval can also be written as


where
Interval arithmetic operation is defined on the real set R. Therefore, the four classic algorithms (add, subtract, multiply, and divide) also suit for the interval variables, so it is called interval algorithm. Taken two real intervals

If there is a real function

The interval function
To this end, this article selects the Chebyshev inclusion function due to the characteristics of uncertain parameters in bolted joints, having Chebyshev higher numerical accuracy than other inclusion functions.
Chebyshev inclusion function
If function

which states that every continuous function can be approximated by any order polynomials to obtain any precision.
Using pk(x) to stand for a set of polynomials whose degree is not bigger than k, then

where a0, a1,…, ak can be any real number.
For every single nonnegative integer k, there must be a unique polynomial

Equation (31) shows that
This article selects the truncated Chebyshev polynomial to get the best uniform approximation polynomial with lower order. Considering a one-dimensional problem first, the one-dimensional Chebyshev series of degree k in

where
The Chebyshev polynomial can also be defined in

The Chebyshev polynomials are orthogonal in the interval

Assume a function

where
The error between the Chebyshev series and the original function can be given as

When k is big enough, the error can be neglected, meaning that high accuracy can be obtained.
The constant coefficients
Considering the orthogonality of the Chebyshev series with respect to the weighting function, only when i = p ≠ 0

It is obtained that

That is

where i = 1, 2,…, k.
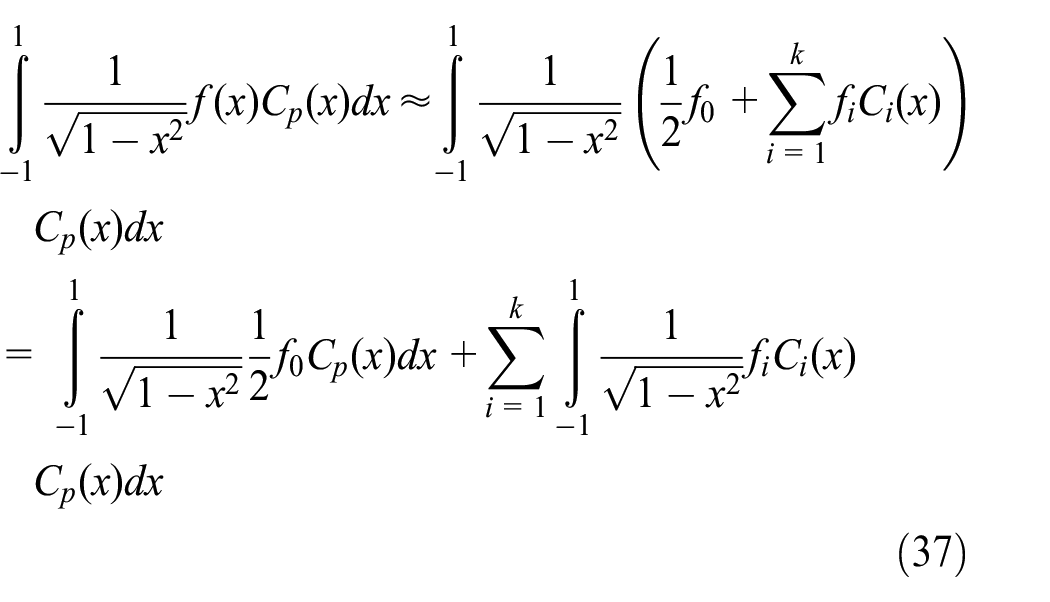
The upper integral can be calculated by the interpolation integral method. The interpolation quadrature can be expressed as

where ρ(x) is the weighting function, xj are the interpolation points, Aj are the integral coefficients, and m is the number of the interpolation points.
If the weighting function is ρ(x) = 1/(1 – x2)1/2, the corresponding orthogonal polynomials are the Chebyshev polynomials. Then the interpolation points are the zeros of the Chebyshev polynomials of degree m given by

where j = 1, 2,…, m.
In this situation, all the integral coefficients are Aj = π/p. Then the next expression can be obtained as follows

Concerning equations (40) and (43), the following can be obtained

Concerning equations (34), since the coefficient is solved, the approximate Chebyshev series pk(x) can be obtained. Then the Chebyshev inclusion function is expressed as

where f(x) is the original function and [fc]([x]) is the Chebyshev inclusion function.
Now the multidimensional function is studied; assume a function f(x) defined in [–1, 1] n , then the Chebyshev polynomials are

The approximate Chebyshev series can be expressed as

where n is the dimension of the problem, k is the order of the Chebyshev series, and q is the number of zeros between i1, i2,…, in. Concerning equation (43), the coefficients
The effect of interval parameters on the stiffness of bolted joints
Based on the analysis in Tables 1 and 3, the mean value of the uncertain parameter D is 1.2389, and the variation ratio is determined to be 0.005. According to equations (23)–(25), D can be written as

where
Values of parameters of the friction model.

The mean value of uncertain parameter G is set to 3.7990e–13, and the variation ratio is set to 0.5. According to equations (23)–(25), G can be expressed as

where
The bolted assembly is composed of two specimens and the pre-tightening force is provided by two M12 bolts. The material of specimens 1 and 2 is 45# steel with the roughness of 1.6 (Figure 5). For analyzing the characteristics of contact of bolted joints, the parameters’ values of
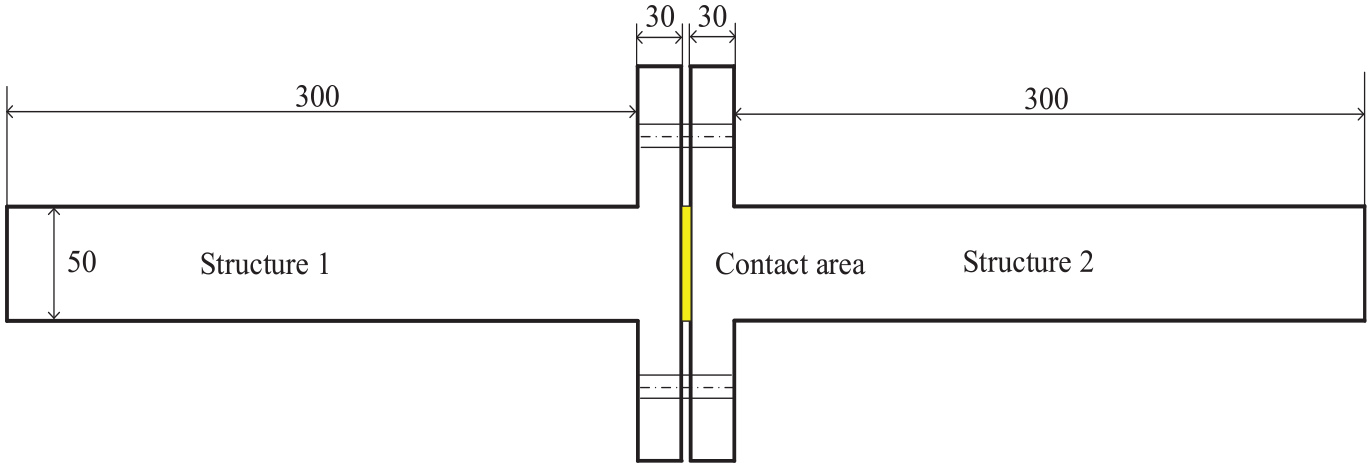
Schematic diagram of bolting structure.
Effects of D and G on Ac and Al
According to equations (16) and (19), al and ac influence the final total normal stiffness Kn and total tangential stiffness directly. Moreover, from equations (5), (10), and (11), the uncertain parameters D and G determine al and ac, respectively. Therefore, the effects of D and G on al and ac need to be discussed.
Effects of D and G on Ac
According to equation (5) and based on the Chebyshev interval method (equations (32)–(34) and (48)), ac can be calculated by the interval number [D]; furthermore, [D] can be expressed by the non-dimensional angle θ. Therefore, ac can finally be expressed by θ

When
The critical truncated area ac of the joint surface increases with the increase of


The effect of D on
It is concluded that the range ratio is 11.62%; compared with the range ratio 0.005 of D, even a slight change of D can lead to bigger fluctuations of ac. This phenomenon often occurs in nonlinear problems.
Similarly, as it has been done for D, according to equations (5), (32)–(34), and (49), ac can also be calculated by G, and it can finally be expressed by an angle α, where
In Figure 7, ac decreases from 1.5106e–31 to 0.1678e–31 with the increase of α from 0 to π. Moreover, ac increases with the increase of uncertain parameter G from 1.8995e–13 to 5.6958e–12. Like equation (50), it is obtained that [ac] = [0.1678e–31, 1.5106e–31], acc=0.8392e–31, and rad[ac]=0.6741e–31. The range ratio is 80% bigger than that of G of 0.5 and it cannot be neglected.

The effect of G on
In addition to the analysis of the effect of D and G on ac separately, their comprehensive effects on ac are analyzed to obtain the exact range interval of ac. The two-dimensional and six-order Chebyshev interval methods were applied to this problem and the result is shown in Figure 8. The minimum value of ac is 1.492e–32 and the maximum value of ac is 1.6960e–31. Finally, it is obtained that [ac] = [0.1492e–31, 1.6960e–31], acc = 0.9226e–31, rad[ac] = 0.7734e–31, and the range ratio is 83.82%

The effect of D and G on ac.
Effect of D and G on Al
Similar to the above analysis of the
According to Figure 9, the interval varies with the iteration number and the order of the Chebyshev method; when the iteration number is bigger than 25, the interval tends to be constant and the interval iteration converges fast. When the order is bigger than 3, the interval tends to be constant too; thus, the order and iteration number are determined.

The effect of order and iteration number on the interval.
When analyzing the effect of D, G is considered as a certain number. Finally, D and G are represented by θ and α, respectively, as shown in Figures 10–12.

The effect of D on

The effect of G on

The effect of D and G on
The result of the above analysis on
The result of the analysis about

The effect of uncertain parameters on the stiffness of bolted joints
In section “Uncertainty parameters of the bolted joints,” the uncertain fractal parameters D and G were analyzed and the interval of D and G was calculated; in section “Effects of D and G on Ac and Al,” the interval of Al and Ac affected by uncertain parameters was obtained through the Chebyshev interval method. Concerning equations (16) and (19), Kn and Kt were determined by D, Al, and Ac directly. In this section, the relationship between Kn, Kt and D, Al, and Ac will be discussed.
Like the above analysis about D and G, Al and Ac can also be expressed by the non-dimensional angle

The effect of D, Al, Ac on
The interval of
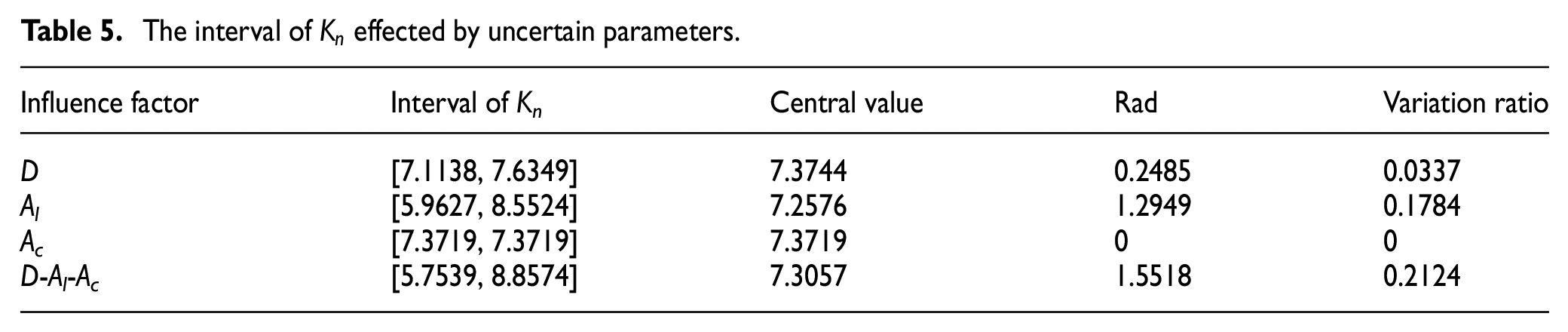
The normal stiffness calculated by the certain method is Kn = 7.433e5 and it is included in the interval. From Table 5, a variation ratio up to 0.2124 is big enough to change the dynamic behavior of bolted joints. In the design, manufacturing, and assembly processes, the variation ratio must be considered to enhance reliability and reduce the system failure probability.
Figure 14(a) shows the relationship between the normal pressure and normal stiffness. The normal stiffness tends to increase with the increase of normal pressure because of the increase of total real contact area Al with the increase of normal pressure, and similarly, this result is reported in the studies of Majumdar and Bhushan 7 and Wang and Komvopoulos. 8 Normal stiffness increases slowly when the normal pressure is higher than 4e7 Pa, for the contact state of the surface will enter full plastic deformation stage. Besides, the stiffness interval widens with the increase of normal pressure, and the variation ratio changed from 0.2078 to 0.2439. It can be concluded that the effect of the uncertainty enlarges due to the increase of normal pressure.
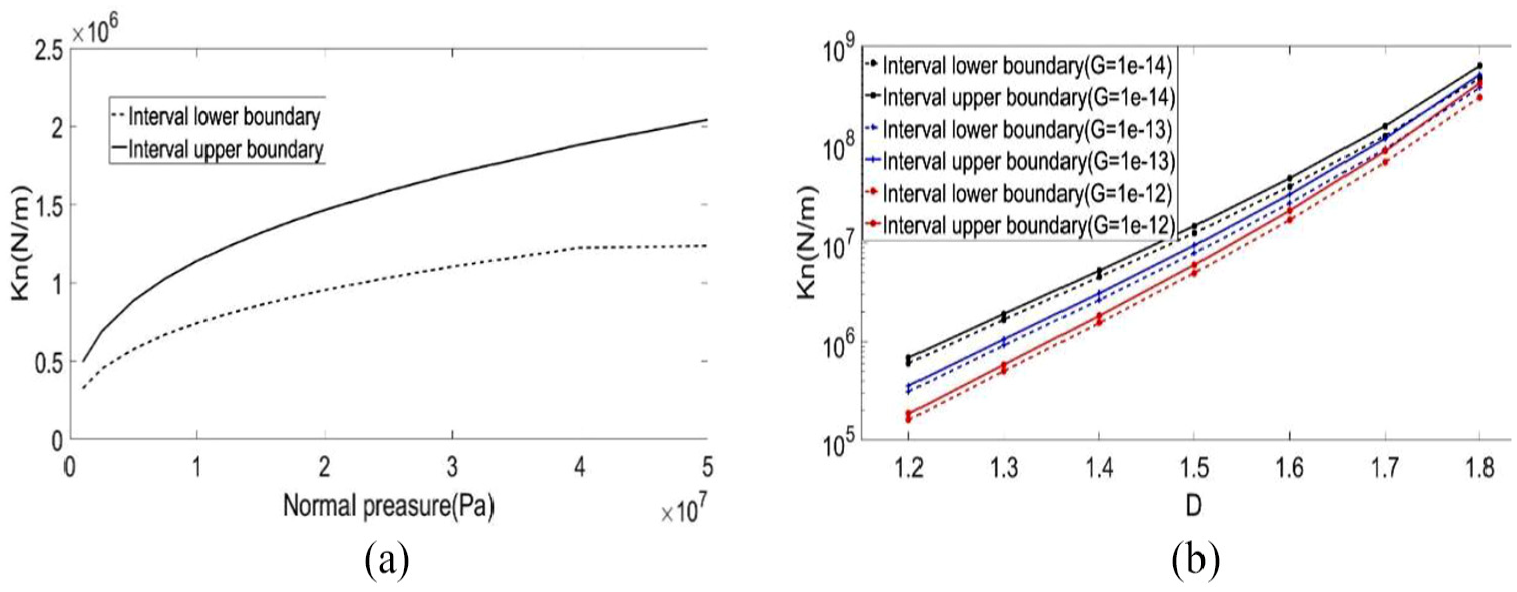
Relationship between normal pressure, fractal dimension, and interval of normal stiffness: (a) interval of normal stiffness versus P and (b) interval of normal stiffness versus D.
The variation ratio of every single D is determined to be 0.005 based on the above analysis. Then the relationship between the interval of Kn and fractal dimension D can be obtained. Figure 14(b) shows the interval of normal stiffness Kn increases with the increase of fractal dimension D, whereas it decreases with the increase of fractal roughness parameter G. The value of Kn calculated through the certain method proved to be included in the interval, meaning the roughness of the surface increases when D decreases, whereas the roughness increases when G increases, and the smaller the surface roughness, the bigger the stiffness. The conclusion is in agreement with the studies of Majumdar and Bhushan 7 and Wang and Komvopoulos. 8 Considering the variation ratio increases from 0.0647 to 0.1604, the uncertainty of D greatly influences Kn, especially for big values of D.
Figure 15(a) shows Kt tends to decrease when the interval parameters decrease from the maximum value to the minimum.

The effect of D, Al, Ac on Kt: (a) separate effect of D, Al, Ac on Kt and (b) simultaneous effect of D, Al, Ac on Kt.
The interval of

Figure 16(a) shows the relationship between total tangential stiffness and normal pressure. Tangential stiffness tends to increase with the increase of normal pressure because the total real contact area Al increases with the increase of normal pressure. Moreover, Kt increases slowly when the normal pressure is bigger than 4e7 Pa, and the stiffness interval widens with the increase of normal pressure for the variation ratio increases from 0.2071 to 0.2115. Figure 16(b) shows the interval of tangential stiffness Kt increases with the increase of fractal dimension D whereas it decreases with the increase of fractal roughness parameter G. The value of Kt calculated through the certain method can be proved to be included in the interval. Considering the variation ratio increases from 0.0630 to 0.1568, the uncertainty of D greatly affects Kt especially for big values of D. The reason agrees well with the analysis of Kn and the result is consistent with that in the studies of Majumdar and Bhushan 7 and Wang and Komvopoulos. 8

Relationship between normal pressure, fractal dimension, and interval of
Conclusion
In this article, the Chebyshev interval method is presented to estimate the contact stiffness of bolted joint with uncertain parameters. The fractal dimension D and fractal roughness parameter G are considered as the uncertain parameters. Interval models of the uncertain parameters are introduced to the fractal model and the equations are solved through the Chebyshev interval method. Normal and tangential stiffnesses are calculated based on the fractal model in microscale, and the upper and lower boundaries of the normal and tangential stiffness are determined using the Chebyshev interval method. The results show that the interval of the stiffness increases with the increase of fractal dimension D, whereas it decreases with the fractal roughness parameter G. The results are in good agreement with the referenced papers. Moreover, the variation ratio of the normal stiffness is 0.1604, the variation ratio of tangential stiffness is 0.1568, and thus, it is big enough to change the dynamic behavior of bolted joints. For the bolted joint systems, the variation ratio must be considered to enhance the reliability and reduce the system failure probability in design, manufacturing, and assembly processes.
Footnotes
Handling Editor: Zuzana Murčinková
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by National Science and Technology Major Project of China (2018ZX04032002-002), Beijing major science and technology projects (Z181100003118001), Beijing Municipal Education Commission Science and Technology Project (KM201710005016).