
Abstract
In this article, we study bistability, multiscroll, and symmetric properties of fractional-order chaotic system with cubic nonlinearity. The system is configured with hyperbolic function consisting of a parameter “g.” By varying the parameter “g,” the dynamical behavior of the system is investigated. Multistability and multiscroll are identified, which makes the system suitable for secure communication applications. When the system is treated as fractional order, for the same parameter values and initial conditions and when the fractional order is varied from 0.96 to 0.99, multiscroll property is obtained. Symmetric property is obtained for the order of 0.99. The fractional system holds only single scroll until 0.965 order and when the order increases to more than 0.99, it is having two-scroll attractor. This property opens a variety of applications for the systems, especially in secure communication. Adaptive synchronization of the system using sliding mode control scheme is presented. For implementing the fractional-order system in field-programmable gate array, Adomian decomposition method is used, and the register-transfer level schematic of the system is presented.
Introduction
Designing chaotic systems with more complex dynamics has been of great interest to the researchers.1–6 Dynamical systems with multiscroll attractors can present more complex dynamics than general chaotic systems with mono-scroll attractors. Chaotic system with multiscroll attractors found its significance in secure communication because of the system complexity which greatly improves the encryption performance. 7 Various methods have been proposed to generate multiscroll attractors.8–15 The introduction of a family of n-scroll chaotic attractors by Suykens and Vandewalle 16 using quasi-linear function method is identified as one of the methods to strengthen the complexity of chaotic system. After the formulation of a generalized n-double scroll Chua’s circuit using three-state controlled cellular neural network, designing multiscroll chaotic system became a hot topic in chaotic research field.17,18
The generation of multiscroll attractors by controlling the equilibrium point of a system is discussed in Ontañón-García et al. 19 Time-delayed hyperchaotic system having multiscroll attractors with multiple positive Lyapunov exponents (LEs) is proposed in Wang et al. 20 A chaotic oscillator capable of generating n-scroll chaos with multiple-cycle nonlinear transconductor is reported in Salama et al. 21 Microcontroller-based circuit realization of a four-dimensional multiscroll hyperchaotic system is proposed in Sun et al. 22 The generation and application of one- and two-dimensional (2D) multiscroll chaotic systems in an encryption technique is given in Radwan and Abd-El-Hafiz. 23 Cellular neural network–based chaotic model for generating multiscroll attractors with hyperbolic tangent function series is proposed in Günay and Altun. 24 Introducing hyperbolic function is one successful method to enhance the number of scrolls present in the system.
Fractional order offers a novel modeling approach for systems with extraordinary dynamical properties by introducing the notion of a derivative of non-integer (fractional) order. Fractional calculus is found especially useful in system theory and automatic control, where fractional differential equations are used to obtain more accurate models of dynamic systems. 25 It also develops new control strategies and enhances the characteristics of control loops. Fractional-order systems have recently emerged as another platform capable of demonstrating multiscroll chaotic attractors.26,27 Such systems can give rise to chaos even though the total order is less than 3 (however, greater than 2). 28 The chaotic systems with rich dynamic properties can find its application in cryptosystem.29–31 Complete analysis and engineering applications of a mega stable nonlinear oscillator are given in the literature. 32
In this article, hyperbolic function is introduced in a cubic nonlinear system to achieve multiscroll, symmetricity, and bistability, which increases the complexity of the system, and hence the system can be used in secure communications. In addition, we bring out a new way of finding multiscroll property by varying only the fractional order “q,” which is not mentioned in any recent literatures.
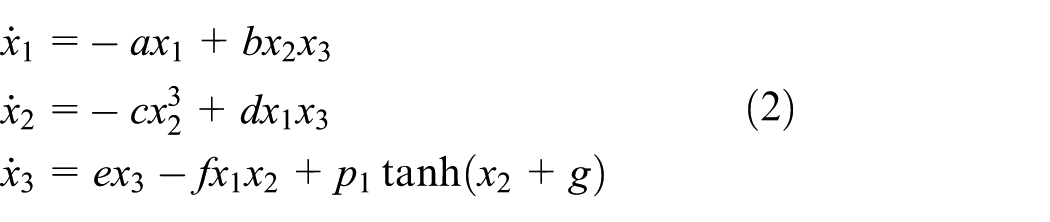
An autonomous chaotic system with cubic nonlinearity 33 is investigated for nonlinear properties. The state-space equation is given in equation (1). The system showed chaotic behavior for particular values of parameters

Multiscroll property is analyzed in system 33 by varying the parameters a and c. Special properties like multistability and symmetricity are not analyzed in system. 33 Fractional-order form is also not analyzed. If the chaotic system is rich in dynamics, it will be more suitable for secure communications.
In this work, we investigated the influence of hyperbolic function on dynamical behaviors of the system (1) and also analyzed special properties. Furthermore, we formulated fractional-order form of the system using Grunwald–Letnikov (G-L) method for refining the analysis. The article is organized into five sections. The second section provides the details and configuration about the chaotic system with cubic nonlinearity and hyperbolic function. The third section deals with the analysis of the integer system for various dynamical properties. The fourth section provides the generation of fractional-order chaotic system with hyperbolic function and its dynamical behaviors. The fifth section discusses the synchronization scheme, and the last section provides field-programmable gate array (FPGA) implementation.
Three-dimensional chaotic system with cubic nonlinearity and hyperbolic function
In this article, we modified the system (1) by introducing a hyperbolic function
When the hyperbolic function is introduced in first state with the parameter

Phase portraits of cubic nonlinear system with

Phase portraits of cubic nonlinear system with

Phase portraits of cubic nonlinear system with
We further investigated by varying the parameters “p1” and “g”, with hyperbolic function in third state. We observed multi scroll property while varying the parameter “g”. This confirms that the parameter “g” plays a major role in the behavior of the system.
Dynamic analysis of the system
Chaotic attractor is obtained when
Equilibrium point and stability
Equilibrium points are obtained by solving

The equilibrium points are

The corresponding characteristic equation for the above Jacobian matrix is
LEs
LEs of a nonlinear system define the convergence and divergence of the states. Although there are different methods, we used the famous method proposed by Wolf et al.
34
The LEs of the system are numerically found as
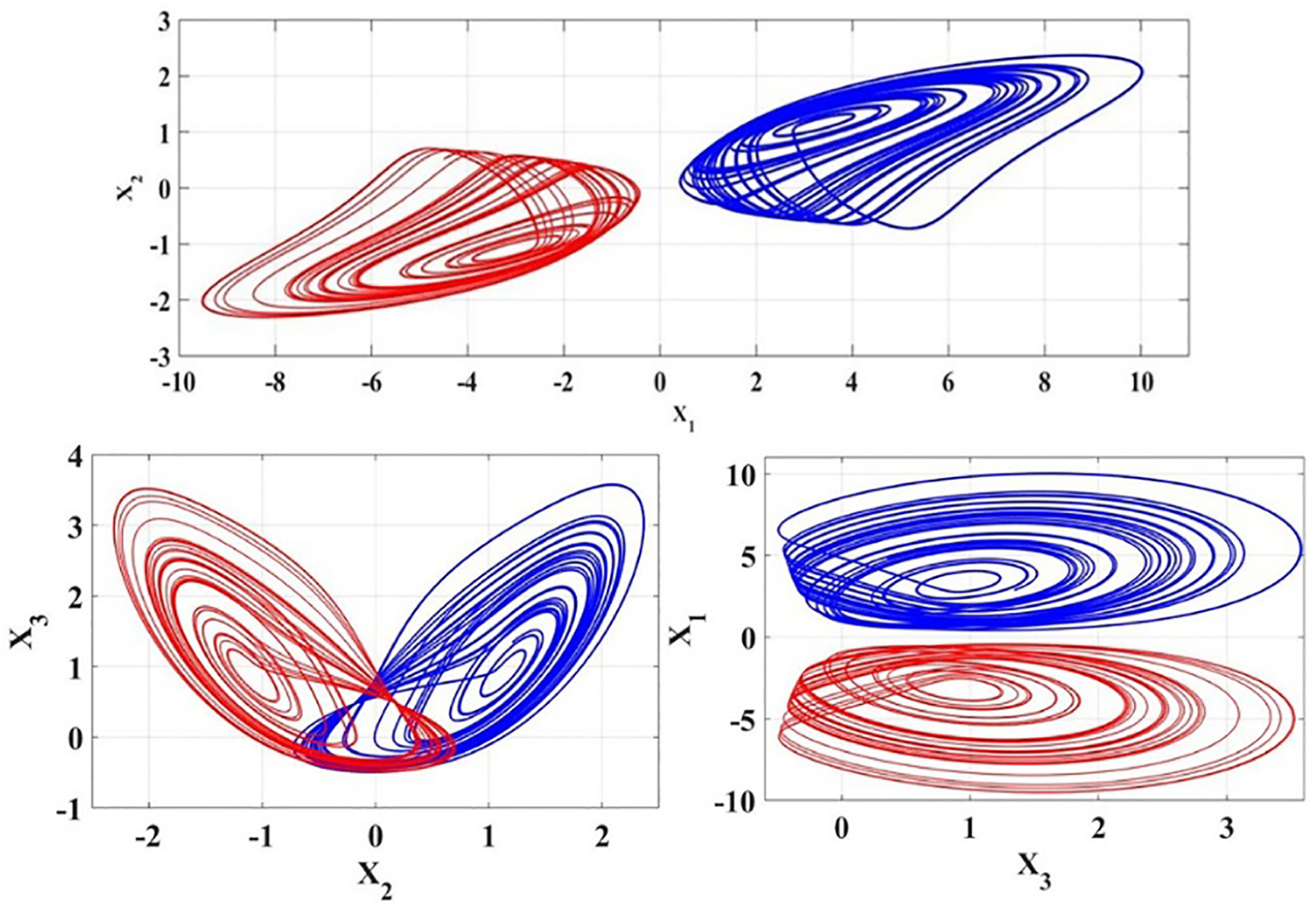
As mentioned before, the parameter “g” varies from −5 to +5, and LEs are plotted in Figure 4. The system shows bistability as can be seen from Figure 5. The bifurcation diagram is obtained by plotting local maxima of the coordinate “x2” in terms of the parameter “g” which is increased (or decreased) in tiny steps. The existence of multistability can be confirmed by comparing the forward (dark blue color) and backward (red color) bifurcation diagrams as shown in Figure 5.

Lyapunov exponent spectrum for “g” values from −5 to +5.

Bifurcation of parameter “g” for different initial conditions.
Phase portraits
The phase portraits of system (2) are plotted for the simulation time of 1000. The numerical simulation is carried out for parameter values

Phase portraits for g = 0 (four-scroll attractor).

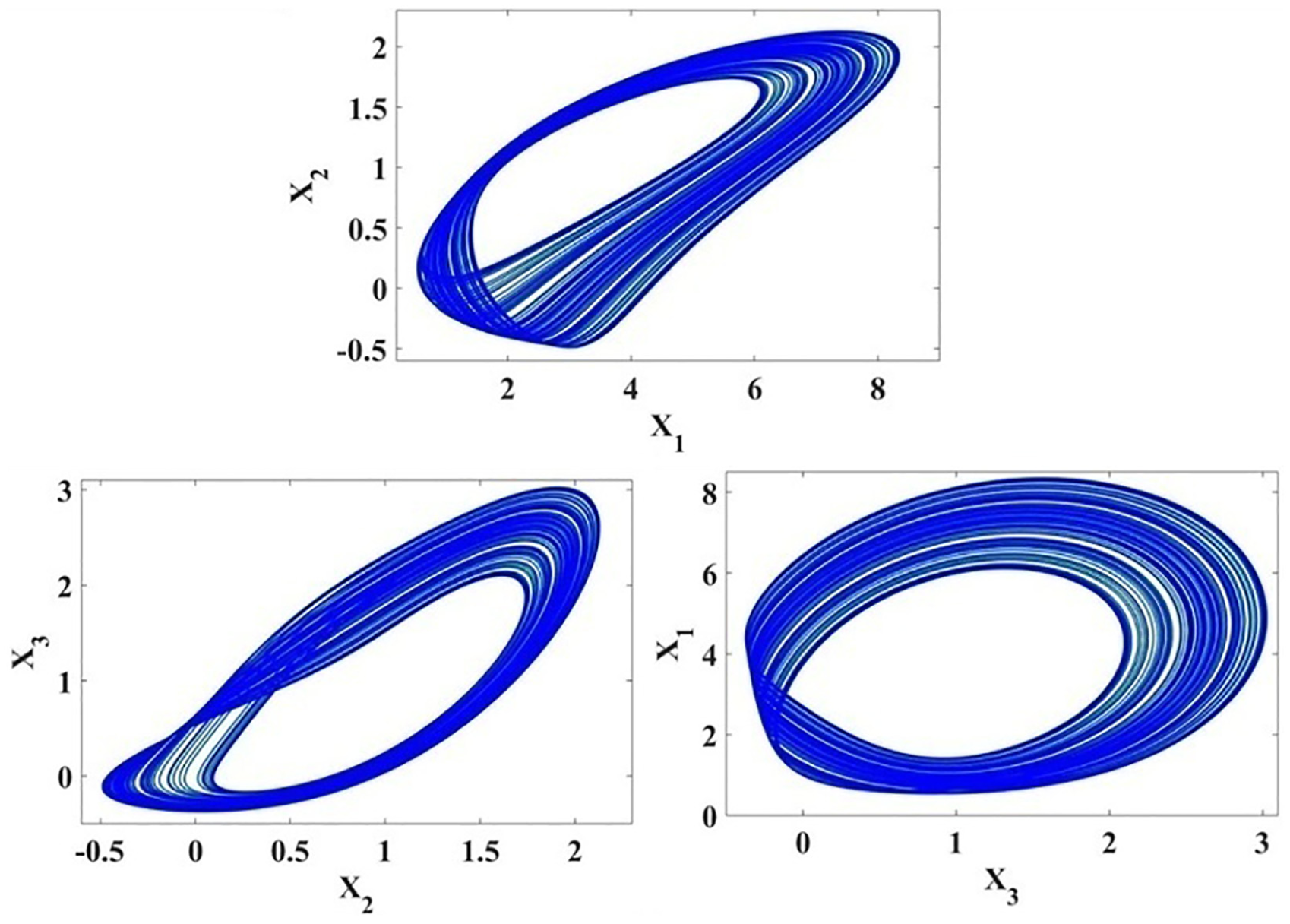
Phase portraits for g = 1.2 (two-scroll attractor).

Phase portraits for g = 2 (single-scroll attractor) for initial conditions [0.1, 0.1, 0.6].

Phase portraits for g = 2 for initial conditions [0.1, –0.1, 0.6].
Fractional-order chaotic system with cubic nonlinearity and hyperbolic function
In this section, we derive the fractional-order model of the chaotic system with cubic nonlinearity and hyperbolic function. There are three generally used definitions of the fractional-order differential operator, namely, G-L, Riemann–Liouville (R-L), and Caputo.35,36
We used the G-L definition, which can be defined as

where
For numerical calculations, the above equation is modified as

Theoretically, fractional-order differential equations use infinite memory. Hence, for numerical calculations or simulations of the fractional-order equations, we have to use finite memory principle

where
The binomial coefficients required for the numerical simulation are calculated as

Irrespective of the importance of the function f(t) near the lower terminal
For the G-L definition, the values of binomial coefficients near the starting point
Short memory principle
If

When



It cannot be a useful bound, as it grows with



Since

we can write

Since


Thus to ensure that the absolute value of error

Using equations (4) to (7), we derive the fractional-order chaotic system with cubic nonlinearity and hyperbolic function

Fractional-order bifurcation
As can be seen from Figure 10, for the change in the fractional order “q” with parameter values

Fractional order bifurcation.

Phase portrait for q = 0.954.

Phase portrait for q = 0.965.

Phase portrait for q = 0.99.
Symmetric property
The fractional-order system (20) is investigated for symmetric property, for order q = 0.99. For same parameter values and initial conditions
Phase portrait for q = 0.99 showing symmetric property with initial conditions [0.1, 0.1, 0.6] is given in blue color and with initial conditions [0.1, –0.1, 0.6] is given in red color.
Multiscroll property
Even though the integer order treatment of the system for various “g” values shows multiscroll, interestingly we could observe bistability in varying the order itself. For g = 1.2 and order q = 0.96, the system shows single scroll (Figure 15). But for same “g” value when order reaches to 0.99, we could observe clear two-scroll attractor (Figure 16). Previously, in Figure 7, we showed the integer order system having two-scroll attractor. It can be observed that for the fractional system up to fractional order 0.965, the system holds single scroll, and when the order is increased above 0.99, it is having two-scroll attractor.
Single-scroll attractor g = 1.2, q = 0.96.

Double-scroll attractor g = 1.2, q = 0.99.
Adaptive synchronization of the system using sliding mode control
Various synchronization techniques for multiscroll attractors are discussed in Li and colleagues.38,39
The sliding control methodology is found to be effective technique for dealing dynamic uncertainty.40,41 In this section, we are using adaptive sliding mode control method to derive for synchronization of the system (2).
The master system is taken as
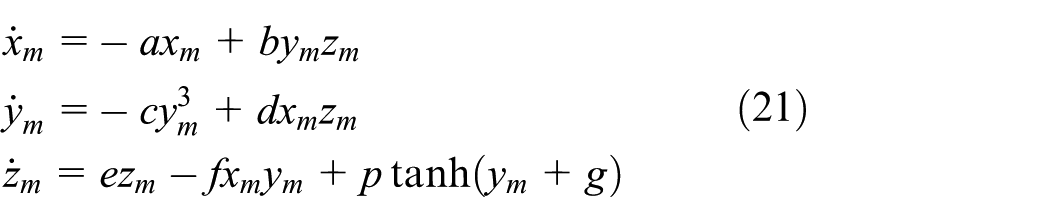
The slave system with controllers is

Synchronization errors can be

Error dynamics are derived by differentiating the synchronization errors

In

In

In

Finally, error dynamics can be written as

Controller design
The controller design is performed in two steps
Constructing a sliding surface which presents the desired dynamics.
Selecting the switching control law to verify sliding condition. 42
The integral sliding surface 41 can be written as

where
The time derivative of the sliding surface is given by

The parameter estimation errors are

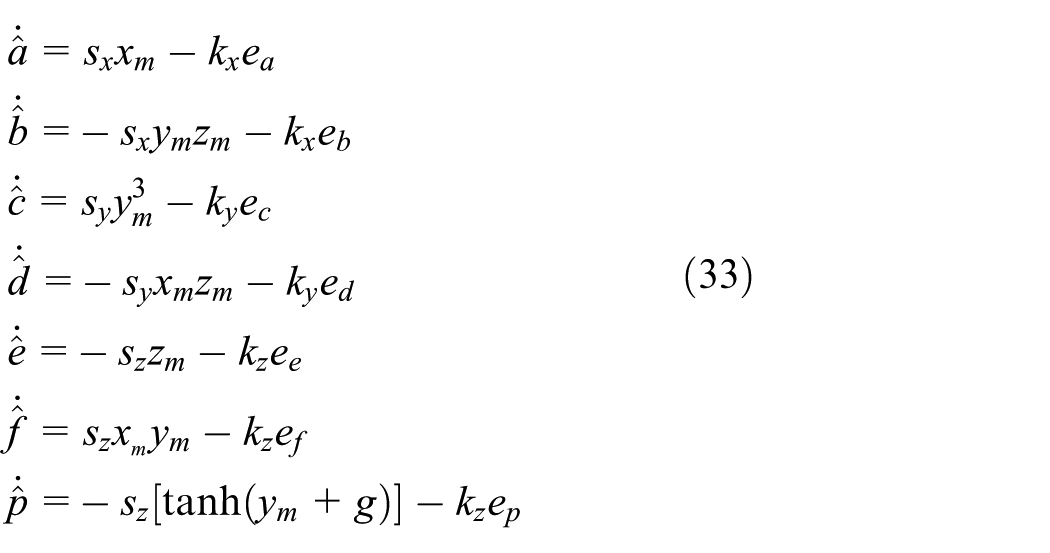
Let the adaptive sliding mode controllers be

Let the adaptive parameter estimations be
To check the stability of the controlled system, let us consider the following Lyapunov candidate function

The derivative of the Lyapunov function is given by

Substitute the controller in

Substitute the adaptive parameter estimation in

where

Introducing the parameter update law and the adaptive sliding mode controllers in equation (38), we get the Lyapunov first derivative as

The Lyapunov first derivative is a negative semi-definite as
Numerical simulation is carried out, and the synchronization errors and parameter estimates are presented against time in Figures 17 and 18.

Time history of synchronization errors.

Time history of parameter estimates.
FPGA implementation
In this section, we discuss the implementation of the system in FPGA using Xilinx (Vivado) system generator toolbox in Simulink. FPGA implementations of fractional-order chaotic oscillators are discussed in literature.43,44 Figure 19 shows the 2D phase portraits of the system using Xilinx System Generator, and Figure 20 shows the Xilinx register-transfer level (RTL) schematics of the system using Kintex 7. Comparing Figure 9 with Figure 19, one can clearly see that the FPGA-implemented system exhibits the same phase portraits for the initial conditions [0.1, 0.1, 0.6].
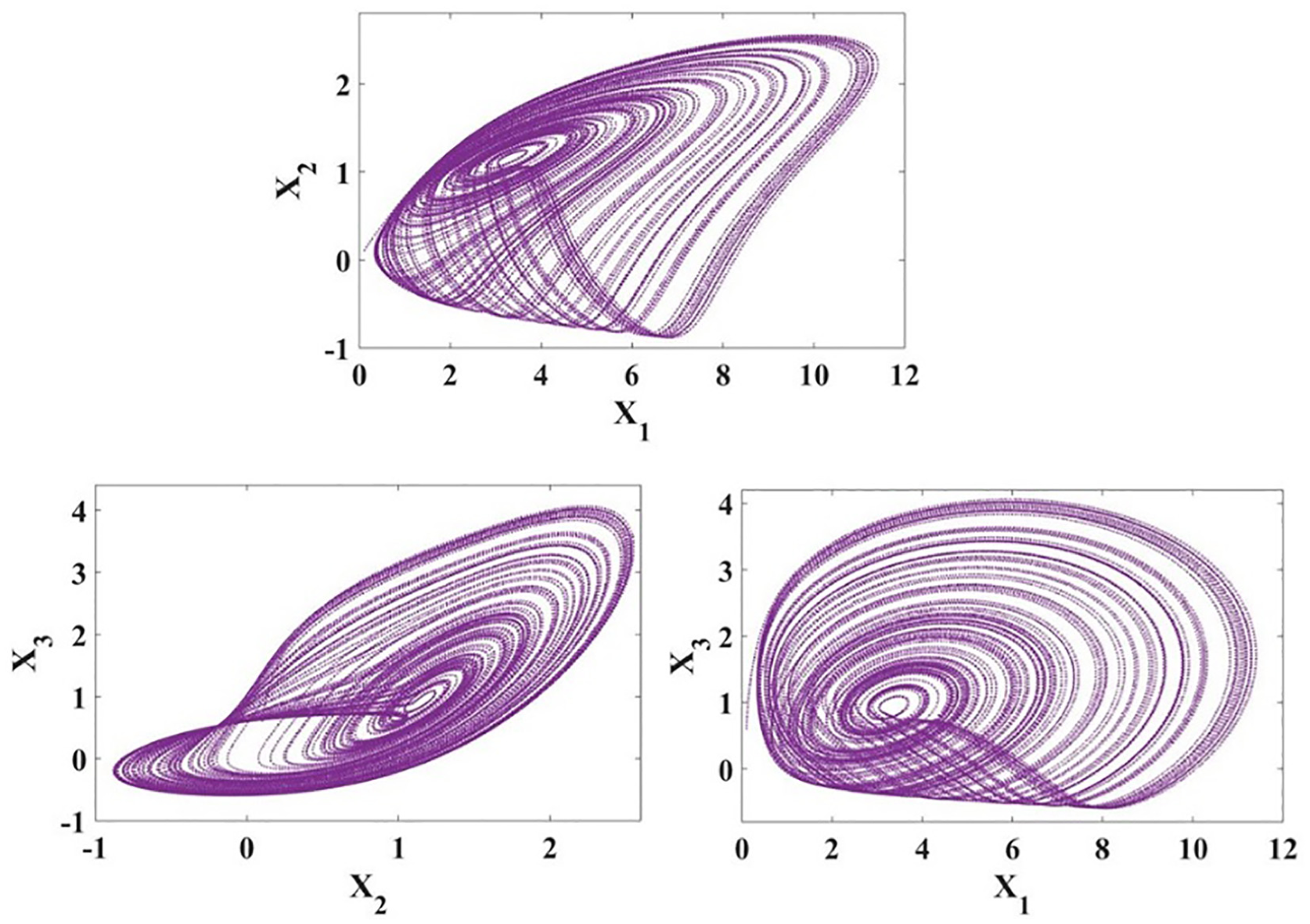
2D phase portrait of the system implemented in FPGA.

RTL schematics of the system implemented in FPGA.
Step size is taken as

Power utilization of the FO system implemented in FPGA.
Resource utilization of the FO system implemented in FPGA.
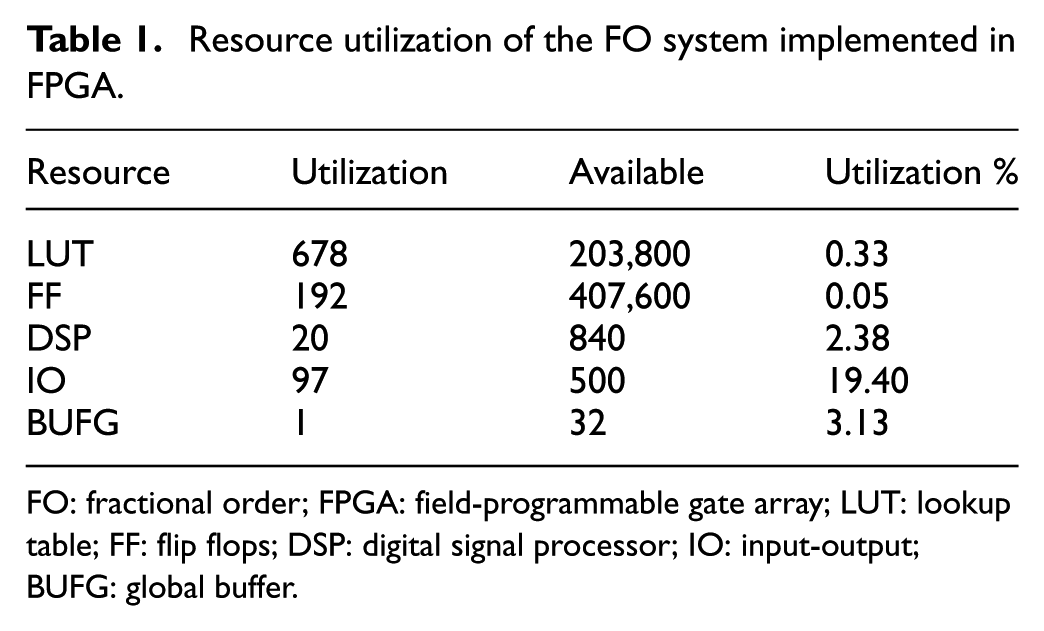
FO: fractional order; FPGA: field-programmable gate array; LUT: lookup table; FF: flip flops; DSP: digital signal processor; IO: input-output; BUFG: global buffer.
Conclusion
The article investigated a chaotic system with cubic nonlinearity and hyperbolic function. The influence of the hyperbolic function is elaborately discussed. The integer order treatment and its dynamical properties are studied and confirm the bistability, multiscroll, and symmetric properties. Using G-L method, the system is converted into fractional-order system. The numerical simulations for various order “q” are studied and confirmed that the above-said properties still remain in the system. Interestingly, by means of varying the order, we could achieve the discussed properties. This shows the intricacy of the system and finds its application in secure communication. Adaptive synchronization of the system using sliding mode control scheme is presented. For implementing the fractional-order system in FPGA, Adomian decomposition method is used and the RTL schematic of the system is presented. Circuit realization would be carried out as a future work.
Footnotes
Handling Editor: Zhouchao Wei
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.