The issue of adaptive finite-time attitude control is explored for rigid spacecraft with input quantization and measurement uncertainties, in which a hysteretic quantizer is introduced. The measurement uncertainties and external disturbances are compensated via adaptive control technique. By combining adding a power integrator technique with a new coordinate transformation, an adaptive finite-time controller is proposed to derive system states into a neighborhood of the origin in finite time. Finally, the control performance of the developed control scheme is demonstrated via simulation results.
In the past decades, the attitude control issue for spacecraft system has been investigated by many scholars. A large amount of control schemes have been reported to enhance the control performance for the attitude control system, for example, geometric approach,1 Lyapunov control,2–4 passivity-based control,5 adaptive control,6,7 sliding mode control,8–10 and finite-time control (FTC).11–15 Among them, FTC techniques can gain higher control precision, faster convergence speed, and better disturbance attenuation and rejection properties. It is worth noticing that the adaptive control scheme provides a good method to attenuate the unknown inertia matrix and external disturbance influences, and some adaptive FTC approaches have been proposed for spacecraft systems with matched uncertainties.16–18 However, it is not focused on measurement uncertainties (MUs) in the aforesaid references. In practice, the attitude and angular velocity of spacecraft system are measured with MUs from many sensors. If the measurement error is not explicitly considered, the static precision and the control performance of the spacecraft system may be destroyed.19–21 Some control schemes are proposed for spacecraft systems with MUs,19–21 but they only guarantee that system states converge to zero or a neighborhood of the origin in infinite time. Few results are paid attention to investigating the finite-time attitude stabilization issue for spacecraft systems with MUs.
The above survey shows that a wealth of research work has been achieved to obtain good performance for attitude control systems. However, the quantization error of the attitude control torque was not taken into account in the aforementioned results. The quantization error can be rationally left out if the quantization accuracy is high. However, when the actuator module and attitude control module are connected via a low-price wireless network, the quantization accuracy is coarse. So it is necessary to put a big spotlight on the quantization error in the analysis and design of attitude controller. The attitude controllers with input quantization have been designed for spacecraft system via different control methods.22–25 However, in previous studies,22–25 the additive MUs were not explicitly concerned. To the best of authors’ knowledge, there are few results to study the problem of finite-time attitude stabilization for spacecraft system with input quantization, MUs, and external disturbances.
From what has been discussed above, the issue of input quantization and MUs in the spacecraft attitude control system is explored carefully. A novel adaptive finite-time attitude controller is constructed for the spacecraft attitude stabilization system in the presence of MUs, input quantization, and external disturbances. Due to the mismatched parameterized unknown functions stemmed from the additive MUs, a virtual control law with an adaptive parameter term is designed. Then, a novel adaptive finite-time controller is obtained by combining a new coordinate transformation with a sliding mode differentiator to surmount the problem of explosion of terms. Furthermore, the stability of the closed-loop system is analyzed via Lyapunov function method. Finally, simulation results are provided to verify the effectiveness of the obtained controller.
Rigid spacecraft systems and preliminaries
The following attitude kinematics and dynamics equations are given based on modified Rodrigues parameters (MRPs)
where and mean the angular velocity and the attitude of spacecraft, respectively; is the inertia matrix; and is the external disturbances, with being the identity matrix and satisfies the following properties26
denotes a quantized input, which is defined as27,28
In equation (4), and , where , , and The parameters and mean the size of the dead zone for and a measure of quantization density, respectively. denotes the latest value of before the time instant and . Mathematically, for and for , where with being the time instants when makes transitions.
Due to measure the attitude and angular velocity via many kinds of sensors, and the sensors are effected by complicated space environment, so that the measurement quantities are generally uncertain. Then the attitude and angular velocity can be defined as
where and mean the measurement errors. Calculating the first derivative of equation (5) along with system equations (1) and (2) yields
where , , and .
Some assumptions and lemmas are presented as follows.
Assumption 1
The external disturbances and the inertia matrix satisfy and , where and .
Remark 1
It is reasonable to assume that the external disturbances and the inertia matrix are bounded, since all the environmental disturbances due to aerodynamic drag, solar radiation pressure, gravitation, or magnetic forces are bounded and the inertia matrix is the constant matrix with some uncertainties.
Assumption 2
The MUs and their derivative are bounded such that and with unknown constants and .24,25
Remark 2
Because the properly sensors can effectively measure data within a limit of allowable error, it is a reasonable condition.
Based on the definitions of and Assumptions 1 and 2 plus properties (equation (3)), we have the following assumption.
where and , and is a positive function; then for for any given bounded initial condition .
Controller design and stability analysis
In this section, by using a power integrator technique, an adaptive FTC strategy will be presented. Meanwhile, the stability analysis of the closed-loop system is established via Lyapunov function theory.
Controller design
Step 1: The following equation is considered
Based on Assumption 3 and Young’s inequality, we have
where is the virtual control law, which can be designed as
where is ratio of two odds and . Combining equations (17) with (18) yields
where .
Step 2: The Lyapunov function is constructed as
where
, where is the estimation of ; will be defined later.
Remark 3
In equation (21), if we define , it may lead to singularity when computing the derivative of . To solve this problem, a new coordinate transformation is given and then the Lyapunov function (equation (21)) is constructed. Taking the derivative of equation (20) yields
where . By employing Lemmas A.1-2 in Qian and Lin,32 we have
where . For any , using Lemmas A.1-2 in Qian and Lin32 produces
where .
The last term in equation (26) needs to calculate the first derivative. In order to reduce the complexity of count, a first-order sliding mode differentiator is employed to estimate its derivative. We have
where , , and , , and are system states.
On the basis of equation (28) and Levant’s study,34 we obtain
where is the estimation error of sliding mode differentiator. According to Levant,34 we have with . Combining equations (26) to (29) and considering equation (9) plus using Lemma 2 lead to
where .
Note that
where , , and .
The controller and adaptive laws are designed as
where , , , , , , , , and .
The design block diagram procedure of the proposed control scheme is shown in Figure 1.
Block diagram of control system.
Remark 4
The adaptive finite-time controller is designed in equation (32) with adaptive laws (equations (34) and (35)). In equation (33), it contains four parts: the first part is used to guarantee the closed-loop system that has a good control performance, the second and third parts are employed to reject the unknown parameters, and the fourth part is designed to cope with the term due to the existence of quantizer.
Remark 5
The input constraint problem is an interesting topic. Based on the present work, we can introduce the auxiliary system to remove the influence of the input constraints.35,36
Stability analysis
Now, the stability analysis of the closed-loop system is illustrated as follows.
Theorem 1
Consider the rigid spacecraft (equations (6) and (7)) with Assumptions 1 to 3 and the controller (equation (32)). Then all the states of the closed-loop system are bounded and can converge to a neighborhood of origin in finite time.
Proof. By using Lemma 3, we have and . Then we obtain . Furthermore, one has
Based on Lemma 3.6 in Zhu et al.,38 the system (equations (6) and (7)) is practically finite-time stability. Moreover, the compact set is
Hence, the proof is completed.
Remark 6
From equation (47), in order to obtain a good control performance, we can add the value of and and reduce the value of with suitable selection of the design parameters in , and . Thus, specific control performance and control action are achieved via regulation parameters in practice.
Simulation results
In this section, some simulation and comparison results are given to demonstrate the effectiveness of the obtained controller. The parameter of the spacecraft system is presented as
The initial states are selected as and . Choose as
To demonstrate the superiority of the proposed scheme (adaptive finite-time controller), the control method (fixed-time controller plus disturbance observer) in Sun et al.24 is used for comparison.
The quantization parameters and are chosen as . Meanwhile, the measurement errors are assumed as and .
The controller parameters are selected as
The controller parameters in Sun et al.24 are chosen as
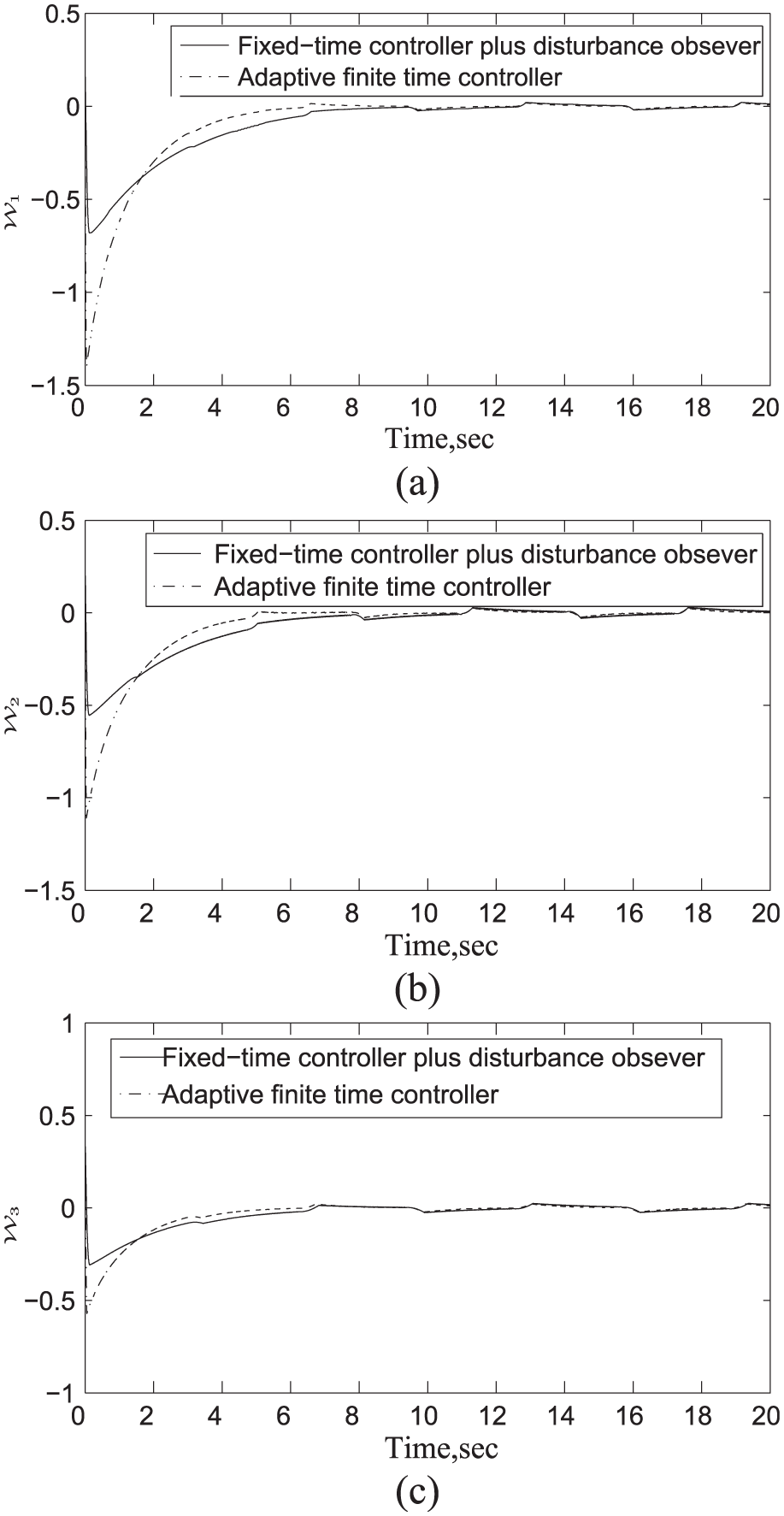
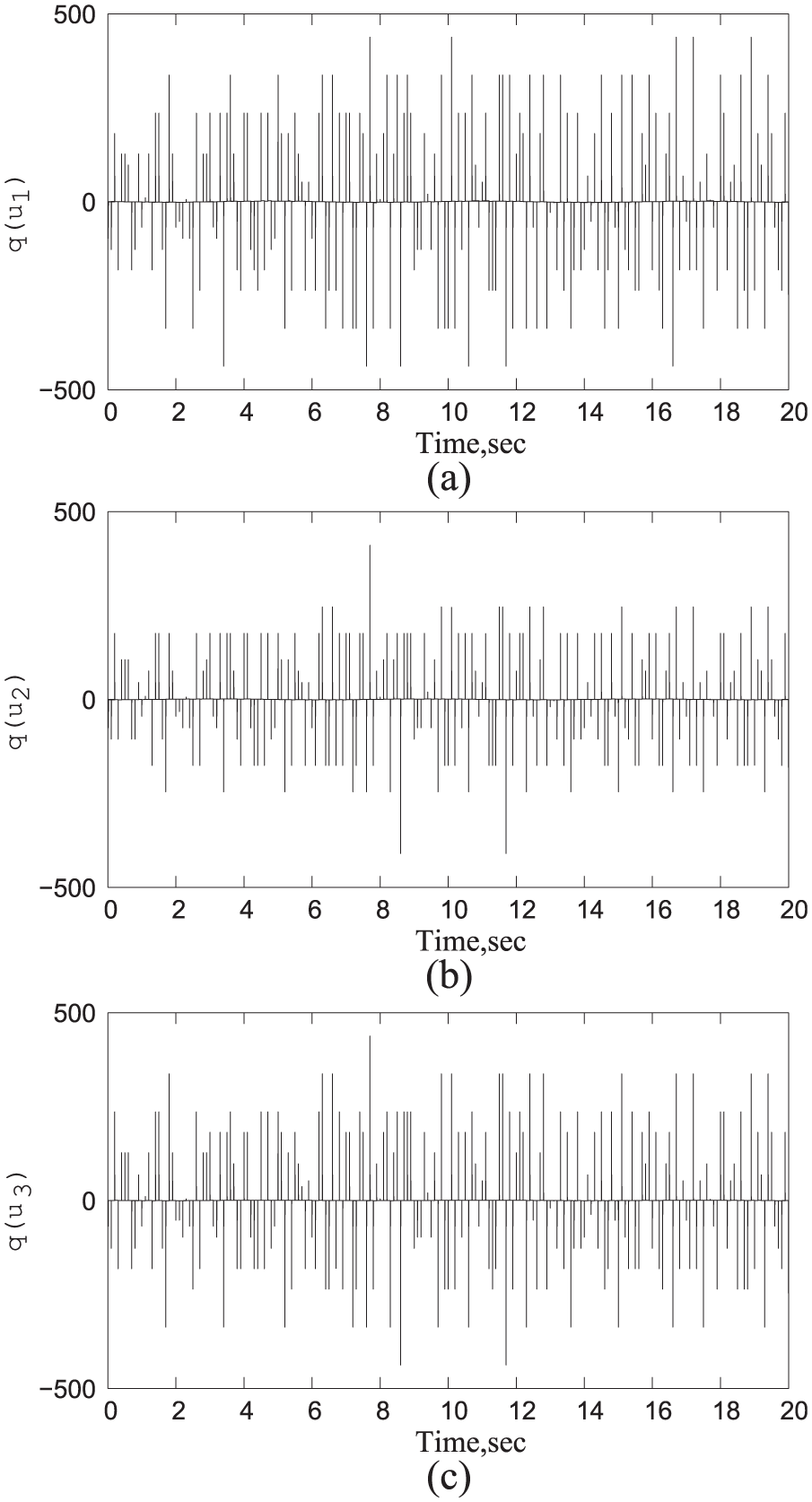
In Figures 2 to 4, the simulation results are presented. Response curves of system states under two controllers are presented in Figures 2 and 3. According to Figures 2 and 3, we find that the proposed control method can obtain better controller performance than the controller in Sun et al.24Figure 4 shows the quantized signal . In Figure 5, the adaptive parameters and are depicted.
Response curves of attitude under two controllers: (a) , (b) , and (c) .
Response curves of attitude velocity under two controllers: (a) , (b) , and (c) .
Curves of quantized input under two controllers: (a) , (b) , and (c) .
Curves of adaptive parameters: (a) and (b) .
To demonstrate the effectiveness in a practical environment, the band-limit white noises are imposed on the system, response curves of the angular velocity and the attitude are presented in Figures 6 and 7. Comparing Figures 2 and 3 shows that the tracking performance becomes poor. Curves of control inputs are given in Figure 8.
Response curves of attitude under two controllers and parameter uncertainties: (a) , (b) , and (c) .
Response curves of attitude velocity under two controllers and parameter uncertainties: (a) , (b) , and (c) .
Curves of quantized input under two controllers and parameter uncertainties: (a) , (b) , and (c) .
Conclusion and further work
The issue of adaptive quantized FTC for rigid spacecraft with MUs has been studied in this article. By using power technique, an adaptive finite-time controller has been presented, which can ensure that all the signals in the closed-loop systems can converge to a neighborhood of region in finite time. Finally, the effectiveness of the proposed scheme has been demonstrated via simulation results. Further work will focus on the output feedback attitude control for spacecraft system with input and output quantization and MUs.
Footnotes
Handling Editor: Yun Lai Zhou
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (61873331, 61773236, 61773235, and 61803225), in part by the Taishan Scholar Project of Shandong Province (TSQN20161033 and TS201712040), and in part by the Postdoctoral Science Foundation of China (2017M612236).
ORCID iD
Haibin Sun
References
1.
ForbesJRDamarenCJ. Geometric approach to spacecraft attitude control using magnetic and mechanical actuation. J Guid Contr Dyn2010; 33(2): 590–595.
2.
ThienelJSannerRM. A coupled nonlinear spacecraft attitude controller and observer with an unknown constant gyro bias and gyro noise. IEEE T Automat Contr2003; 48(11): 2011–2015.
3.
AliIRadiceIGKimJ. Backstepping control design with actuator torque bound for spacecraft attitude maneuver. J Guid Contr Dyn2010; 33(1): 254–259.
4.
SunHBHouLLZongGDet al. Composite anti-disturbance attitude and vibration control for flexible spacecraft. IET Control Theory A2017; 11(14): 2383–2390.
5.
LizarraldeFWenJT. Attitude control without angular velocity measurement: a passivity approach. IEEE T Automat Contr1996; 41(3): 468–472.
6.
ZouAMKumarKD. Adaptive attitude control of spacecraft without velocity measurements using Chebyshev neural network. Acta Astronaut2010; 66(5): 769–779.
7.
YoonHAgrawalBN. Adaptive control of uncertain Hamiltonian multi-input multi-output systems: with application to spacecraft control. IEEE T Contr Syst Technol2009; 17(4): 900–906.
8.
SinghSNIyerA. Nonlinear decoupling sliding mode control and attitude control of spacecraft. IEEE T Aero Elec Sys1989; 25(5): 621–633.
9.
ZhuZXiaYQFuMY. Adaptive sliding mode control for attitude stabilization with actuator saturation. IEEE T Indus Electron2011; 58(10): 4898–4907.
10.
HuQLShaoXDChenWH. Robust fault-tolerant tracking control for spacecraft proximity operations using time-varying sliding mode. IEEE T Aerosp Electron Syst2018; 54(1): 2–17.
11.
LiSHDingSHLiQ. Global set stabilisation of the spacecraft attitude using finite-time control technique. Int J Contr2009; 82(5): 822–836.
12.
LiSHDingSHLiQ. Global set stabilization of the spacecraft attitude control problem based on quaternion. Int J Robust Nonlin Contr2010; 20(1): 84–105.
13.
LuKFXiaYQYuCMet al. Finite-time tracking control of rigid spacecraft under actuator saturations and faults. IEEE T Autom Sci Eng2016; 13(1): 368–381.
14.
HuQLJiangBY. Continuous finite-time attitude control for rigid spacecraft based on angular velocity observer. IEEE T Aerosp Electron Syst2018; 54(3): 1082–1092.
15.
HuQLJiangBYZhangYM. Observer-based output feedback attitude stabilization for spacecraft with finite-time convergence. IEEE T Contr Syst Technol2019; 27(2): 781–789.
16.
LuKFXiaYQ. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica2013; 49: 3591–3599.
17.
HuoBYXiaYQLiuKFet al. Adaptive fuzzy finite-time fault-tolerant attitude control of rigid spacecraft. J Franklin Inst2015; 352(10): 4225–4246.
18.
ZhaoLYuJYuH. Adaptive finite-time attitude tracking control for spacecraft with disturbances. IEEE T Aerosp Electron Syst2018; 54(3): 1297–1305.
19.
SinglaPSubbaraoKJunkinsJL. Adaptive output feedback control for spacecraft rendezvous and docking under measurement uncertainty. J Guid Contr Dyn2006; 29(4): 892–902.
20.
de RuiterAH. Observer-based adaptive spacecraft attitude control with guaranteed performance bounds. IEEE T Automat Contr2016; 61(10): 3146–3151.
21.
SunLZhengZW. Disturbance-observer-based robust backstepping attitude stabilization of spacecraft under input saturation and measurement uncertainty. IEEE T Indus Electron2017; 64(10): 7994–8002.
22.
WuBL. Spacecraft attitude control with input quantization. J Guid Contr Dyn2016; 39(1): 176–181.
23.
WuBLCaoXB. Robust attitude tracking control for spacecraft with quantized torques. IEEE T Aerosp Electron Syst2018; 54(2): 1020–1028.
24.
SunHBHouLLZongGDet al. Fixed-time attitude tracking control for spacecraft with input quantization. IEEE T Aerosp Electron Syst2019; 55(2): 124–134.
25.
SunLZhengZW. Saturated adaptive hierarchical fuzzy attitude-tracking control of rigid spacecraft with modeling and measurement uncertainties. IEEE T Indus Electron2019; 66(5): 3742–3751.
26.
TsiotrasP. Stabilization and optimality results for the attitude control problem. J Guid Contr Dyn1996; 19(4): 772–779.
27.
WangCLWenCYLinYet al. Decentralized adaptive tracking control for a class of interconnected nonlinear systems with input quantization. Automatica2017; 81: 359–368.
28.
ZhouJWenCYYangGH. Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal. IEEE T Automat Contr2014; 59(2): 460–464.
29.
HardyGHLittlewoodJEPólyaG. Inequalities. Cambridge: Cambridge University Press, 1952.
30.
WangMZhangSYChenBet al. Direct adaptive neural control for stabilization of nonlinear time-delay systems. Sci China Inform Sci2010; 53(4): 800–812.
31.
LiuZWangFZhangYet al. Fuzzy adaptive quantized control for a class of stochastic nonlinear uncertain systems. IEEE T Cyb2016; 46(2): 524–534.
32.
QianCJLinW. A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE T Automat Contr2001; 46(7): 1061–1079.
33.
DuHBLiSHQianCJ. Finite-time attitude tracking control of spacecraft with application to attitude synchronization. IEEE T Automat Contr2011; 56(11): 2711–2717.
GaoSDongHNingBet al. Neural adaptive control for uncertain nonlinear system with input saturation: state transformation based output feedback. Neurocomputing2015; 159: 117–125.
36.
LiYTongSLiT. Adaptive fuzzy output-feedback control for output constrained nonlinear systems in the presence of input saturation. Fuzzy Set Syst2014; 248: 138–145.
37.
QianCJLinW. Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. Syst Contr Lett2001; 42(3): 185–200.
38.
ZhuZXiaYQFuMY. Attitude stabilization of rigid spacecraft with finite-time convergence. Int J Robust Nonlin Contr2011; 21(6): 686–702.