
Abstract
Interval type-2 fuzzy controllers have received attention because of their potential in handling uncertainties better than type-1 (T1) fuzzy controllers. However, directly deriving the analytical structure of interval type-2 fuzzy controllers is a great challenge due to the iterative computation of Karnik–Mendel algorithm and similar ones. Analytical structure is necessary for the analysis and design of control systems (e.g. stability analysis). In this study, a novel technique is proposed for deriving the analytical structure of interval type-2 fuzzy controllers based on the configurations of the triangle interval type-2 input fuzzy sets, T1 output fuzzy singletons, product AND operators, Karnik–Mendel center-of-set type reducer, and centroid defuzzifier. Input space is partitioned into a group of input combinations (ICs), which are produced by superposing input ICs and case ICs, to obtain an analytical structure. Input ICs are evaluated by the upper/lower membership functions and case ICs using the equation of the terminating condition of Karnik–Mendel algorithm. An explicit analytical expression is obtained on any IC because each IC has the same membership functions and switch points. Finally, two examples are used to verify the validity of our method.
Introduction
Interval type-2 (IT2) fuzzy controllers are commonly used fuzzy system. These controllers are popular because their secondary membership functions are all equal to 1, thereby simplifying the inference and computation of fuzzy systems.1,2 In the last decade, IT2 fuzzy controllers have been developed with a sound momentum, and theoretical results and application examples have increased rapidly. However, the advantages of IT2 fuzzy controllers over type-1 (T1) fuzzy controllers remain unknown.
The problem in the field of fuzzy systems is often raised by beginners. The most common answer is: IT2 fuzzy controllers have good control potential because the uncertainty footprint of IT2 fuzzy sets uses many free parameters to describe the uncertainty of linguistic rules. Such explanation is plausible and unconvincing. The so-called remarkable control potential does not indicate that IT2 fuzzy controllers are better than their T1 counterparts but is only a possibility. Furthermore, many free parameters cannot be regarded as advantages in engineering and are even negative in some cases. This phenomenon occurs because additional free parameters may not necessarily improve the control performance. However, they definitely increase the difficulty of design and debugging. To date, the remarkable control potential of IT2 fuzzy controllers has not been negated yet. Using a proper method to strictly prove the existence of this potential is of utmost importance. The analytical structure of controllers is essential to solve this problem. Suppose that the analytic structure is obtained, the internal relations and differences between IT2 and T1 fuzzy controllers can be revealed by observing and analyzing specific analytical expressions.
Scholars began painstaking work to explore the analytic structure of fuzzy controllers, and valuable results have been obtained. These results can be divided into two categories, namely, the analytic structure of T1 fuzzy controllers3–9 and the counterpart of IT2 fuzzy controllers.10–17 Difficulty mainly comes from AND operation in the antecedent part of fuzzy rules by seeking the analytic structure of T1 fuzzy controllers. The derivation for product AND operation is relatively easy.3,10 The derivation for Zadeh AND operation is relatively difficult because it requires evaluating the related membership functions to select the minimum membership degree as the fired value of a rule. The judgment and choice of membership functions are the greatest obstacles to derive an analytical structure. Ying and other scholars proposed a method to divide an input space into a set of input combinations (ICs) for triangle fuzzy sets to solve this problem.3,6,10–12,17 The application of the same membership function can be guaranteed within each IC as the result of the minimum reasoning method. This method avoids the aforementioned judgment and choice and has been generalized to arbitrary shape fuzzy set and Zadeh AND operation of T1 fuzzy controllers.
However, deriving the analytic structure of IT2 fuzzy controllers is difficult because it needs to calculate the switching point of the type-reducer algorithms using iterative calculation, where Karnik–Mendel (KM) and other algorithms are often applied. Iterative calculation becomes a new obstacle for IT2 fuzzy controllers in obtaining an analytical structure. The solution can be roughly divided into three steps: 12 the first step is to derive a set of input-IC using the shape of the upper/lower boundary membership functions. The second step is to derive a set of case-IC using the iterative termination condition of KM algorithm and other algorithms. The third step is to superpose the ICs of the two foregoing steps. Under such condition, specific upper/lower membership functions and switch points can be obtained in each IC. Thus, analytical expression can be easily derived. Existing studies only investigated Zadeh AND operation and did not discuss product AND operation. However, for the membership functions of antecedent parts, dealing with the two types of AND operation is completely different, thereby resulting in variations in the reasoning method of analytic structure. Furthermore, the product AND operation is an important type of inference method of fuzzy rules due to its easy computation. This operation is currently popular among scholars and engineers. Therefore, studying the analytical structure of the IT2 fuzzy controllers based on product AND operation is important.
Configuration of IT2 product AND fuzzy controllers
An IT2 product AND fuzzy controller with two input variables, the error
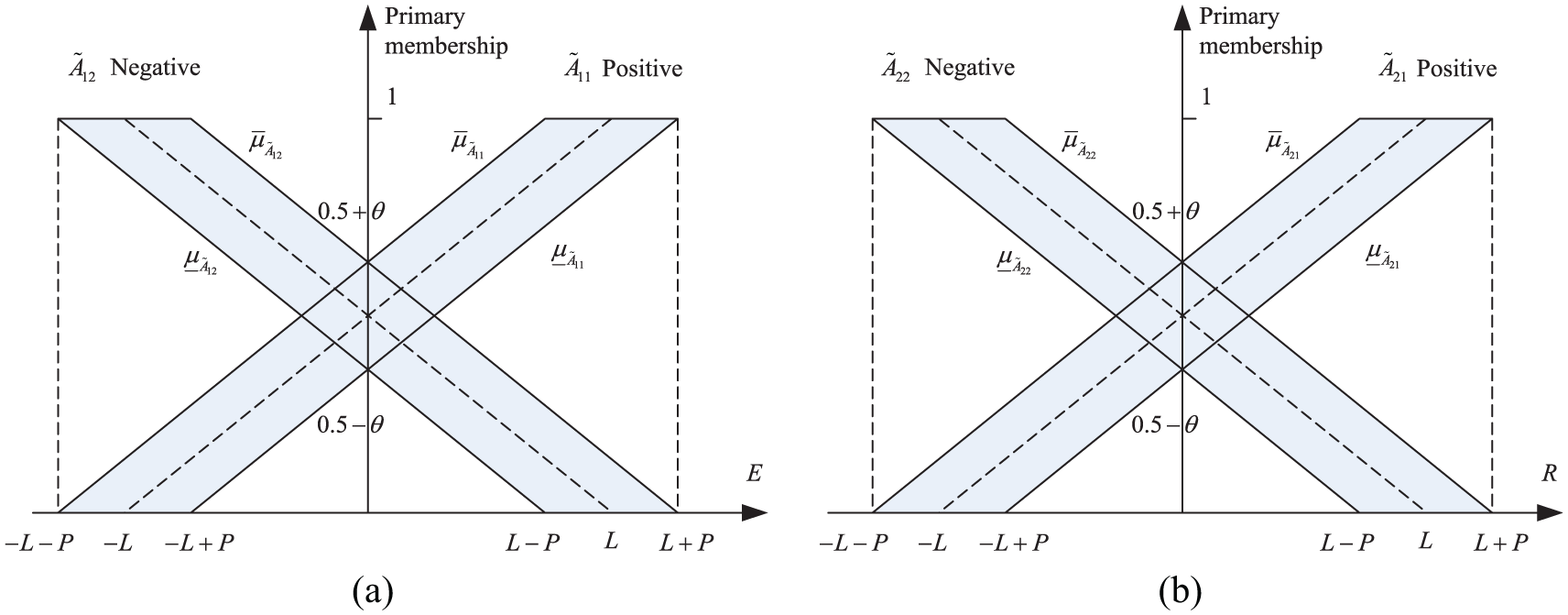
Primary membership functions of the IT2 fuzzy sets (a) for E and (b) for R. On the primary membership axes,
The four following fuzzy rules are used to cover all the different combinations of
Next, suppose that four T1 singleton fuzzy sets correspond to the output of controlling
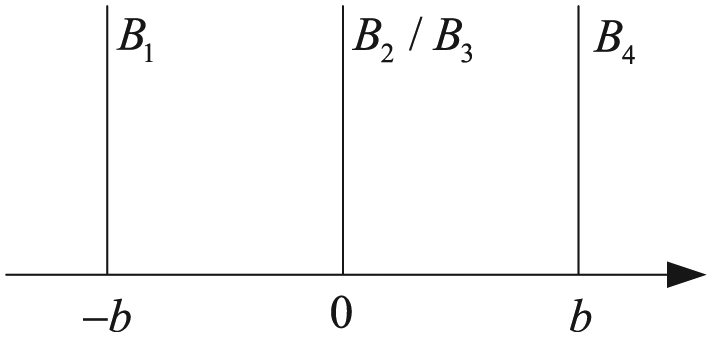
Four T1 singleton fuzzy sets for
The values of four T1 fuzzy singletons, namely,

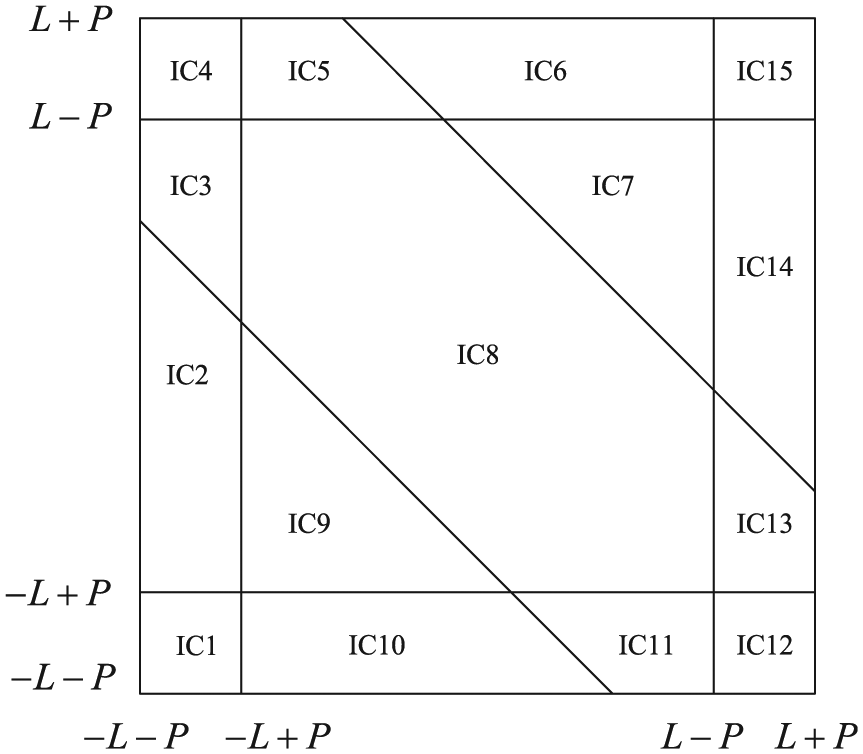
Input ICs on the input space.
On each input IC, the upper/lower membership functions




The firing intervals as results of product AND operations are denoted as




According to the KM type reducer, the exact switch point
Output expressions of IT2 fuzzy controllers with product and operations for all the possible combinations of

On any input IC, one or more area with the same switch points, say
Step 1. Determine the boundary that correspond to the switch point
Step 2. Determine the boundary based on the switch point
Step 3. Number the sub-input-space partitioned by

Case ICs on the input IC5
The intersections of the two lines (

Case ICs on the input space
When Figure 5 is superposed on Figure 3, a final partition is obtained. As shown in Figure 6, the sub-spaces are called ICs.
IC partition when case ICs are superposed on input ICs.
Using Figures 3 and 5, the relationship between the number of

From equations (5)–(8), we obtain

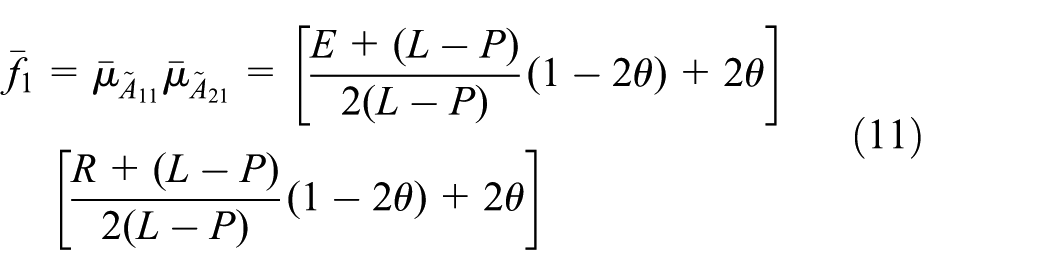

Substituting equations (10)–(17) into equation (9), we obtain the analytical expression of IT2 fuzzy controller on IC8 as follows

Using the same method on all ICs, we obtain a set of the analytical expressions as shown in Table 2.
All analytical expressions on the whole input space.

Examples
Example 1
Let
According to Figure 6 and the given conditions (

ICs on the whole input space when
In Figure 7, the point S denotes the position of the input variables (

Example 2
Parameter
When


IC partition when
Conclusion
This article has discussed the analytical structure of IT2 fuzzy controllers with product AND operation. We considered a Duble-Input-Single-Output system, which employs two input variables, the error and the change of the error, and one output variable, to simplify the problem. The input space must be divided into a set of ICs, which are superposed by input ICs and case ICs, to derive the analytical expression of IT2 fuzzy controllers. Input ICs are evaluated by the upper (lower) membership functions, whereas case ICs by boundaries are regarded by the different combination of the left and right switch points. The boundaries can be obtained by solving the equation, that is, the terminating condition of KM algorithm and some others. We have proposed a three-step method to determine the case ICs. Once input space is partitioned into a set of ICs, the left/right switch points on each IC are immediately identified. The analytical expression can be easily derived using the uniform membership functions and switch points on each IC. For the given configuration of IT2 fuzzy controllers, 15 ICs and their analytical expressions have been obtained in this article.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The projects supported by Hunan Provincial Natural Science Foundation of China under grant number 2017JJ2011 and the Research Project of Education Department of Hunan Province, China, under grant number 17A031.