
Abstract
This article deals with the design of adaptive fuzzy backstepping control for uncertain nonlinear systems in strict-feedback form with tracking error constraints. In this article, a fuzzy system is used to approximate the unknown nonlinear functions and the differential of virtual control law of each subsystem. In order to satisfy the limitation of tracking error constraints, the barrier Lyapunov function is introduced. Moreover, by applying the minimal learning parameters technique, the number of online parameters update for each subsystem is reduced to only 1. The control scheme not only ensures the tracking error is not to transgress the constraint bounds but also solves the problem of “explosion of complexity” and greatly reduces the initial control input and the number of the adaptive parameters; this provides the conditions for the practical application. The simulation results show the effectiveness of the proposed method.
Keywords
Introduction
In nonlinear system modeling, due to modeling error, unknown physical phenomena (friction in mechanical system), load variation, and random disturbance, system uncertainty is unavoidable. Because of the existence of high non-linearity and uncertainty of the nonlinear system, it is very difficult for the design of the controller.1–4 In the past few decades, the adaptive control technology for feedback linearization of nonlinear systems has made remarkable progress.4–6 The feedback linearization requires the uncertainty to satisfy the linear parameterized condition. However, most of the systems in practice cannot be linearized.
LX Wang and JM Mendel 7 proposed adaptive fuzzy control using fuzzy system to approximate the unknown control law or the unknown nonlinear function. In the literature,8–11 an adaptive neural network controller is designed using neural network to approximate uncertain continuous nonlinear functions. The advantage of sliding mode controller is that it has strong robustness to disturbances and unmodeled dynamics, so it has also been widely applied.12–15 However, all the above methods require that the system meets an important condition, that is, the unknown nonlinearity and the control input appear in the same equation of the state space model, which is usually regarded as the matching condition.
In the actual system, there is a large class of nonlinear systems that do not meet the matching condition, such as the system of the mechanical hand which is driven by the motor. For mismatched uncertainty nonlinear systems, the backstepping control is very effective and has achieved great success.16–20 Traditional backstepping control needs to do repeated differentiations of the virtual control law of the former subsystem. If there are nonlinear functions in the virtual controllers, repeated differentiations will lead to the problem of “explosion of complexity” with the increase in the order of the system. This makes high-order systems face great difficulties in controller implementation. If the system has parameters or structural uncertainties and external disturbances, it will further lead to the difficulty in the application of backstepping control.
Swaroop et al. 21 and Zhang and Ge 22 proposed a dynamic surface control (DSC) method, which can avoid the problem of repeated differentiations using n first-order low pass filters and has been widely used. But DSC cannot deal with the uncertainty problem. Since fuzzy systems and neural networks can approximate arbitrary nonlinear functions with arbitrary precision, many literatures have combined them with DSC or backstepping control in recent years.23–30 Liu et al. 31 were the first to propose an adaptive backstepping finite-time fault-tolerant control for strictly feedback switched nonlinear systems based on neural networks. With the development of adaptive backstepping and DSC design in nonlinear systems, many fuzzy or neural adaptive control methods with the minimal-learning-parameters algorithm (MLPA) have been reported in Yang and colleagues. 32 , 33 Previous works 23 , 34 described a direct adaptive fuzzy backstepping control with MLPA of uncertain nonlinear systems in the presence of input saturation.
Output constraints are important constraints for many industrial systems. Ignoring output constraints can lead to performance degradation, hazards, or system damage. In order to solve the output constraints problem, the barrier Lyapunov function (BLF) has received extensive attention, because this function grows to infinity when its related state is close to a certain limit. By maintaining the boundaries of BLF, any violation of output constraints can be prevented.33,35–37 Liu et al., 38 Li and Li, 39 Li et al., 40 and Gao et al. 41 extended the output constraints to full-state constraints based on BLFs for various nonlinear systems. Liu et al. 38 described an adaptive control-based BLF for stochastic nonlinear systems with full-state constraints. Li and colleagues 39 , 40 described approximation-based neural control for multiple input multiple output (MIMO) or single input single output (SISO) nonlinear systems with state constraints and time-varying delays. Gao et al. 41 described an adaptive neural control for a class of nonlinear pure-feedback systems with time-varying full-state constraints.
Based on the above results, a novel adaptive fuzzy backstepping control method is studied in this article. The main advantages of this proposed control method are listed as follows:
An adaptive fuzzy backstepping control design is addressed for a class of strict-feedback nonlinear system which is more general for practical applications, in the presence of uncertain nonlinear function, unknown control gain, output constraints, and external disturbance.
In each subsystem, only one fuzzy system is used to approximate the unknown control gain, the unknown nonlinear function, and the differential of the virtual control of the previous subsystem. At the same time, compensate for all uncertainties and avoid inherent “explosion of complexity” problem. By applying MLPA, the number of online parameter updates of fuzzy logic system for each subsystem is reduced to only 1.
To prevent output from violating the constraints, we employ a BLF. The semi-globally uniformly ultimately boundedness (SGUUB) of all the signals of the closed-loop system are proven. The tracking error converges to an adequately small bound. The effectiveness of the proposed control is demonstrated by a simulation example.
This article is organized as follows: problem statement and preliminaries is described in section “Problem statement and preliminaries.” In section “Fuzzy system and its approximation,” fuzzy system and its approximation is presented. Control design and the adaptive law are presented in section “Adaptive fuzzy backstepping control design.” Stability analysis is proposed in section “Stability analysis.” The simulation results and conclusion are given in sections “Simulations” and “Conclusion,” respectively.
Problem statement and preliminaries
Many mechanical systems in practical engineering have the strict-feedback structure (1), such as robotic manipulators, autonomous quadrotor helicopters, hydraulic actuators, and induction motors

where
Assumption 1
The signs of
Assumption 2
There exist constants
Assumption 3
The reference signal
Assumption 4
External disturbance
Control objective
The control objective is to design an adaptive control scheme such that the output
Lemma 1
Let


where

in the set
Lemma 2
For all

Lemma 3
The following inequality holds for any

Fuzzy system and its approximation
Fuzzy system with product inference, singleton fuzzifier, and center-average defuzzifier is a universal approximator. If the fuzzy rule has the following form:
IF

where


According to the universal approximation theorem of fuzzy system, if
Adaptive fuzzy backstepping control design
Backstepping control scheme
For convenience, symbols
For subsystem 1:

where
For subsystem 2, a virtual control signal

where
For subsystem k, a virtual control signal

where
Define

As a result, system (1) can be rewritten as the following form

where
Equation (14) shows that the control object can be achieved as long as the appropriate virtual control law
Control law and adaptive law design
Step 1. Define
Let
Define
Now a BLF can be chosen as

where
Consider

By applying Young’s inequality, we have

where
By applying Lemma 2, we have

Substituting equations (17) and (18) into equation (16) results in

Choose the first virtual control law



where
Based on Lemma 3, we have

Substituting equations (20)–(23) into equation (19) results in

Completion of Young’ inequality in equations (25) and (26)


Substituting equations (25) and (26) into equation (24) leads to

where
Step 2. Define
The Lyapunov function can be chosen as

where
The time derivative of

By applying Young’s inequality, we have

where

where
Choose the virtual control law


where
By applying Young’s inequality, we have

Substituting equations (32)–(34) into equation (31) results in

where
Step
Let
Choose the following Lyapunov function

The virtual control law


where
Substituting equations (37) and (38) into equation (36) results in
where
Step n, Define
Let
The Lyapunov function is chosen as

where
The time derivative of

Choose the first virtual control law u and parameter adaptive law


where
Substituting equations (42) and (43) into equation (41) results in

Completion of Young’ inequality in equations (25) and (26)


Substituting equations (45) and (46) into equation (44) results in

where
According to the virtual control laws and control laws (20), (32), (37), and (42) and the adaptive parameters laws (21), (22), (33), (38), and (43), not only all the uncertainties are compensated by fuzzy systems but also no repeated differentiation problems exist. Except for the first subsystem, other subsystem has only one parameter to learn online. Therefore, if the order of system is n, only
Stability analysis
The positive Lyapunov candidate function of the closed-loop system is considered as

The derivation of V is as follows

Select the positive coefficients


where
Substituting equations (50) and (51) into equation (49) results in

Define
So equation (52) can be rearranged as

where C, M are positive constants. Moreover, based on the definition of
Multiply




That is, if
Simulations
A motor-driven manipulator is used in the simulations, and the dynamic equation can be written as follows 42

where
The parameters of the manipulator:
The modified adaptive fuzzy backstepping control (MAFBC) scheme described above is summed up as equation (59). In order to verify the effectiveness, we compare the control performance with that of conventional adaptive fuzzy backstepping control (CAFBC) without considering the output constraints which is described as equation (60). The number of adaptive parameters in traditional fuzzy backstepping control is 27, and the number of adaptive parameters in our control method is only 4


The control parameters in the two control methods are designed as follows:
Choose fuzzy membership functions as
Then

Define the fuzzy base function vectors as:
The simulation results are shown in Figures 1–5. Figures 1 and 2 show the performance of the position tracking of the control methods. From Figure 2, we can see that the tracking error provided by MAFBC satisfies the constraints, while the tracking error provided by CAFBC violates the error constraints. Figures 3 and 4 show the performance of the speed tracking. Figure 5 shows the control input signal. It can be seen that the initial control input of MAFBC is much less than that of CAFBC.
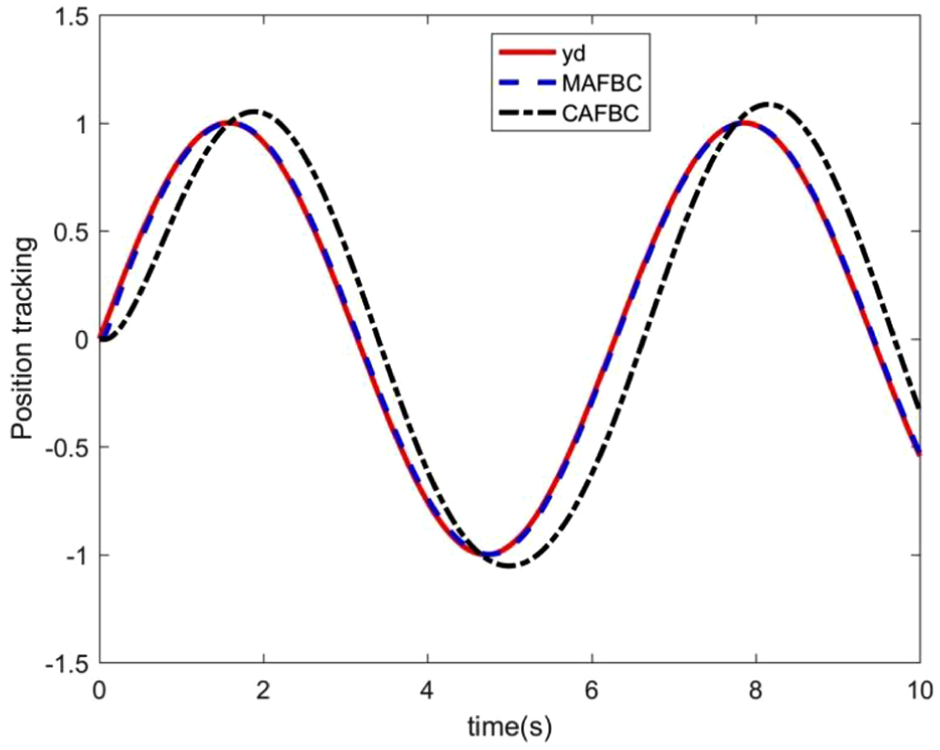
The position tracking.
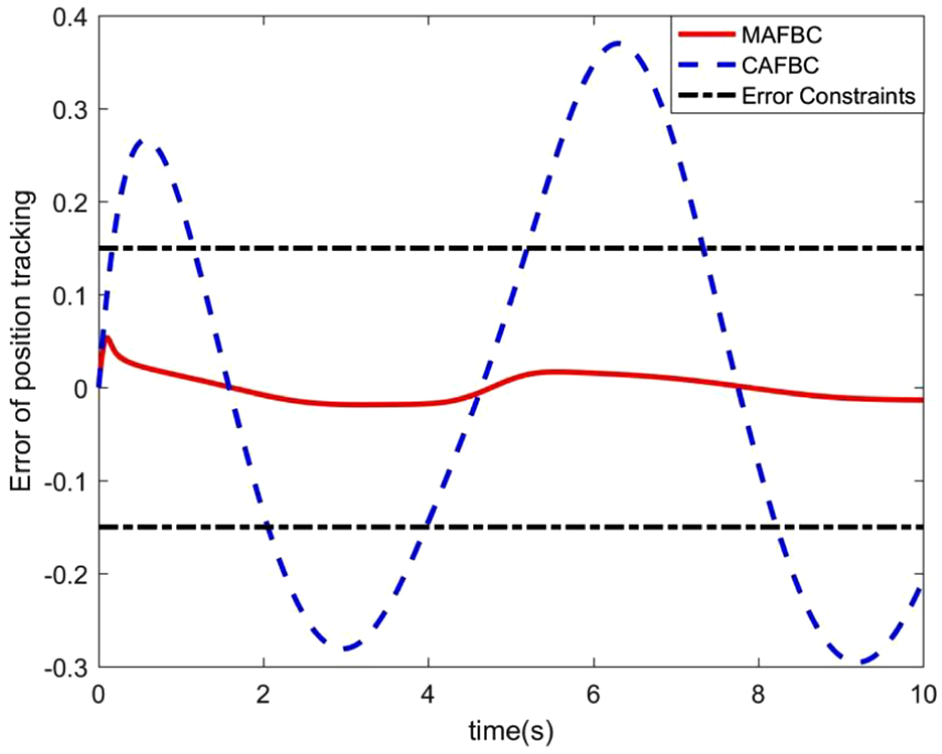
The error of position tracking.

The speed tracking.
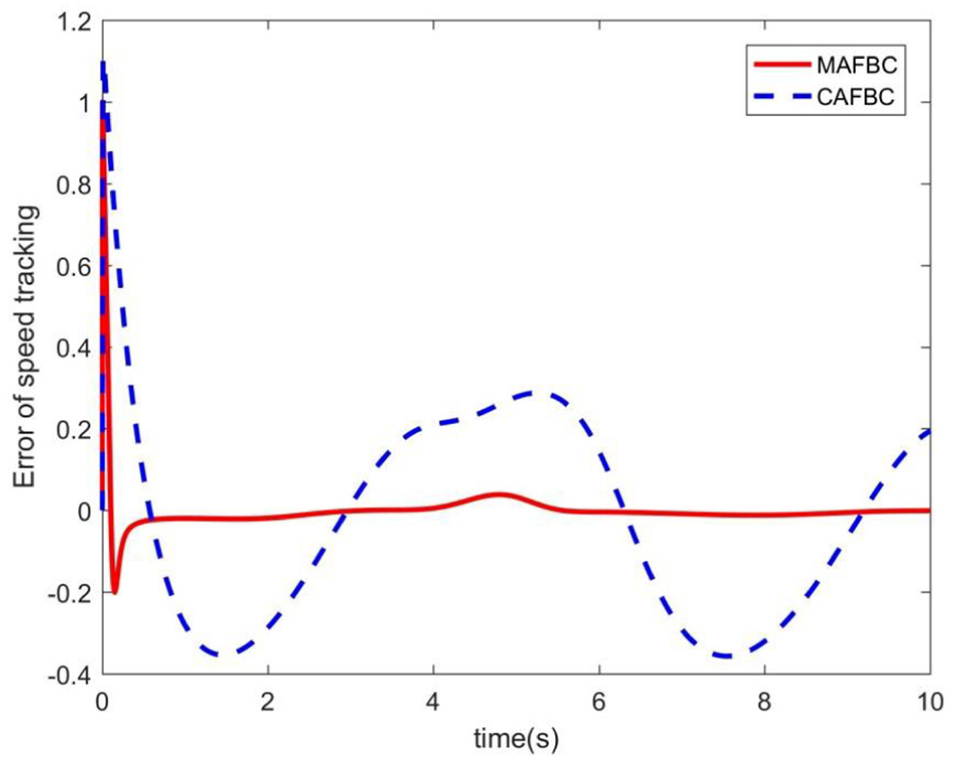
The error of speed tracking.

The control input.
Finally, for a better illustration, the simulation results are summarized in Table 1. From Table 1, it is clearly shown that the proposed control method MAFBC has much less learning parameters, but its control performance is better than that of CAFBC.
The performance comparison of the control schemes.

CAFBC: conventional adaptive fuzzy backstepping control; MAFBC: modified adaptive fuzzy backstepping control.
Conclusion
In this article, a novel adaptive fuzzy backstepping control scheme has been proposed for a class of nonlinear systems in strict-feedback form. Using fuzzy systems and backstepping control, not only uncertainties, such as unknown functions and unknown control gains, are identified, but also the problem of “explosion of complexity” is avoided. By introducing the BLF, the tracking error satisfies the restriction conditions. Moreover, in order to reduce the number of adaptive learning parameters, MLPA is used such that only
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (Grant No. 51775463).