
Abstract
Previous studies on parallel mechanisms have been limited to symmetrical and semi-symmetrical parallel robots. However, there is relatively little research on asymmetrical parallel robot, especially on asymmetrical parallel robots with 4 degrees of freedom. Considering of disadvantages of modern technology, a new type of asymmetric parallel manipulator is proposed based on the theory and method of position and orientation characteristic equations in this article. First, the topology theory of parallel mechanism is expounded, the robot structure is described and the position and orientation characteristic set is calculated to obtain the degrees of freedom and the coupling degree of the parallel manipulator. Then the structure coupling–reducing theory is used to realize the structure decoupling of the robot. Second, the forward kinematics solution of the parallel robot is analyzed by ordered single-open-chain method, the inverse kinematics solution is solved by the algebraic method, and a numerical example is provided to confirm the correctness of the solution procedure. Finally, the workspace of the robot is analyzed by search method. Generally, the above theoretical research provides an important reference value for the industrial design and application of the parallel robot.
Keywords
Introduction
Parallel robots have attracted more attention of researchers both at home and abroad because of their high strength, high precision, and small cumulative error. Especially, parallel robots with small degree of freedom (DOF) have good application prospects in the industrial field.
1
In recent years, enumeration method based on DOF formula
Among the low-DOF mechanisms, the mechanisms of 4-DOF and 5-DOF robots are difficult problems that the mechanism scientists have been trying to break through, especially the 4-DOF parallel mechanisms with three movements and one rotation. However, Changzhou University has synthesized some 4-DOF mechanisms and made kinematic analysis by using the theory of POC set;8–11 most robots are asymmetric parallel mechanisms, which can achieve a specific DOF movement, so they have broad market prospects. Fully symmetrical parallel robots refer to the fact that the branching chains connecting the moving and the fixed platforms of the robots are identical, not only in the branching chains but also in the space. Asymmetric parallel robots refer to the branched chains that connect the moving and fixed platform of the robot. At least one branched chain is different from other branched chains in structure or space configuration. Because of the symmetry of structure and space configuration, it is very difficult to synthesize such mechanisms, especially for 4-DOF and 5-DOF parallel robots. Therefore, the syntheses of fully symmetric parallel robots are few in the world. Asymmetric parallel robots can obtain the required DOFs through different branched chains or different combinations of the same branched chains. Generally speaking, a parallel robot can be regarded as an asymmetric parallel robot if one or one of its branches is different from other branches in structure or space configuration.
For parallel manipulators, the mechanism is complex, and the forward solution is difficult. Only a few mechanisms can be solved by the analytical expression. In order to solve the forward solution problem of complex parallel manipulators, the position and attitude of the manipulator can be solved by reducing the coupling degree of the mechanism combined with POC equations. At present, the research of mechanism decoupling method is very few, and Shen and colleagues12–14 have done some research in this field. When the coupling degree of the mechanism is 1, we can use the ordered single-open-chain (SOC) method to find the direct solution of the mechanism.15–20
Based on the aforementioned review, it could be found that seldom research has ever given regard to the asymmetrical parallel robots. The thesis, therefore, will contribute to the solution of this problem so that this asymmetric parallel robot can provide some reference value for configuration design. At the same time, the non-instantaneous mechanism can be obtained using POC set method. According to the theory and method based on POC set, a new type of asymmetrical parallel robot is proposed in this article, which can realize three-dimensional (3D) movement and one-dimensional (1D) rotation. The structure of the mechanism is decoupled, and the direct position and attitude of the mechanism are obtained by the method of ordered SOC method, and the workspace of the mechanism is obtained by the inverse solution equations.
An overview of POC set theory
The 12 basic topological structure characteristics are indispensable for analyzing parallel mechanism and are the basis for studying its internal mechanism. These characteristics specifically include the POC set, type and number of DOF, basic kinematic chain (BKC), independent displacement equation number, independent loop number, input–output decoupling, over-constrained number, drive pair selection, and so on.21,22 The motion of parallel mechanism is the result of each branch chain motion synthesis, meanwhile, is also the result of the intersection of POC set of branch chain. Its basic operation conforms to the inherent law of mechanism.
The terminal POC equations of the mechanism can be written as


The formula of DOF is


where F is the DOF of parallel mechanism,
According to the principle of mechanism composition of the ordered SOC method, a mechanism can be decomposed into several BKCs, and a BKC can be decomposed into several SOCs. The constraint degree of the

For a BKC, the following formula must be satisfied

Therefore, the coupling degree can be written as

The physical meaning of k is that it reveals the intrinsic correlation and dependence between the basic loop variables of the mechanism. The larger the value, the more complex is the mechanism. In addition, its kinematics and dynamics analyses are more complex. In mechanism analysis, we hope to obtain mechanisms with lower coupling degree, especially those with 0 or 1 coupling degree. The forward and backward solutions of such mechanisms are relatively simple and more practical in daily life. Therefore, structural decoupling of complex mechanisms is also an important part of mechanism research.
Topological characteristics of mechanisms
Description of mechanism characteristics
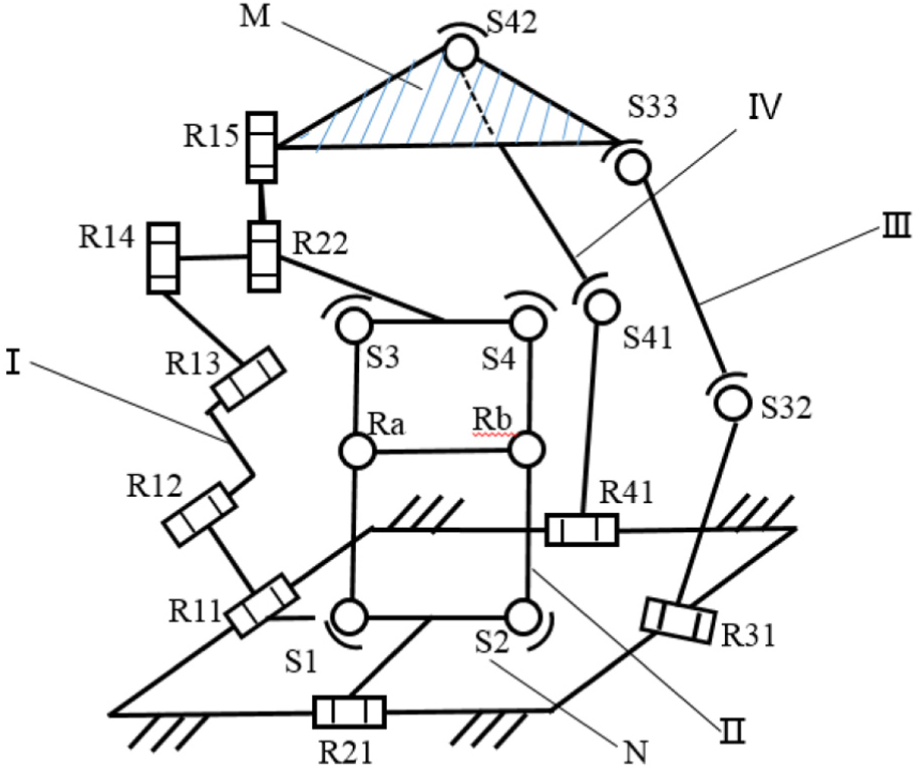
The parallel mechanism was described in this article is shown in Figure 1. It is mainly composed of a moving platform M, a fixed platform N, and four branches I, II, III, and IV. Branched chain I is a series chain which can produce 3D movement and two-dimensional (2D) rotation. Branched chain II is also a series chain which can generate 3D movement and 2D rotation. Branch chain III and branch chain IV are a 6-degree-of-freedom chain with end-output motion, whose DOFs both are 6 and do not impose any restrictions on the moving platform. The four driving pairs of the parallel mechanism should be arranged on the fixed platform and are all revolute pairs in accordance with the composing characteristics of mechanism. According to POC set operation of the parallel mechanism, the compound motion of four branches can be obtained, that is, the output motion of the moving platform M. Finally, the output motion of the moving platform is three translations and one rotation.

The sketch of robot structure.
The arrangement of parallel mechanism is as follows: the moving platform adopts arbitrary quadrilateral form, the fixed platform adopts square form, and the four rotation pairs on the fixed platform are located in the middle of the square, respectively. In order to ensure that the ball pairs S1, S2, S3, and S4 form parallelograms, it is necessary to add two rotating pairs Ra and Rb with the length equals to the short side of the parallelogram. At the same time, the axis of
Topological analysis of parallel mechanism
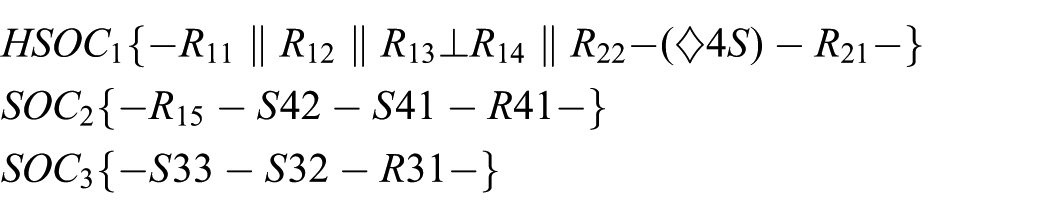
Figure 1 shows the model of the mechanism before decoupling, and the four branches of the mechanism are independent. The topological structure of branched chain I is
The POC set of the branched chain is

The topological structure of branched chain I is
The POC set of the branched chain is

The topological structures of branched chains III and IV are
The POC sets of these two branched chains are

According to formula (2), the POC set of the moving platform can be obtained as follows

Determining the DOF and coupling degree of parallel mechanism
1. Determining the DOF and POC set of the first loop.
According to equations (3) and (4), we have

The DOF and POC set of sub parallel mechanisms consisting of branched chains I and II are

2. Determining the DOF and POC set of the second loop

3. Determining the DOF and POC set of the third loop

From the above analysis, it can be seen that when the four rotation pairs of the fixed platform are chosen by mechanism as driving pairs, the moving platform can realize the output motion of three translations and one rotation.
Calculation of coupling degree of parallel mechanism
From the above analysis, it is known that the independent displacement equations of the three loops are
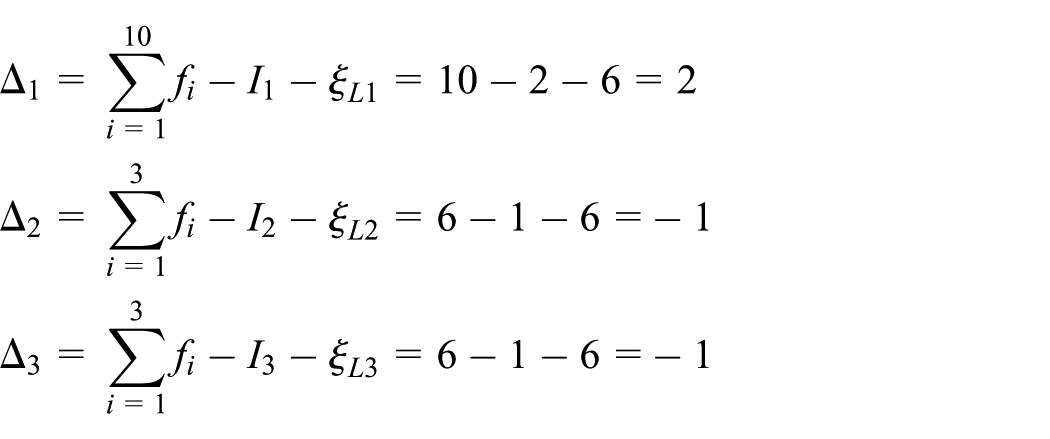
Therefore, the coupling degree of the mechanism can be obtained as follows

Because the coupling degree of the mechanism is 2, it reflects that the parallel mechanism is very complex. In addition, it is very inconvenient to analyze its kinematics and dynamics. In order to facilitate the simple kinematics calculation and the control, it is necessary to analyze the structural decoupling of the parallel mechanism. When the coupling degree is reduced to 1, the forward solution of the mechanism can be obtained by 1D search method. When the coupling degree is reduced to 0, the analytical solution of the mechanism can be obtained directly.
Structural coupling-reducing analysis
According to the principle and method of structural coupling-reducing,12–14 the branched chains III and IV are kept unchanged, and the rotation pair axis connected to the moving platform coincide with the branched chains I and II; by doing so, the structural coupling reducing of the mechanism can be achieved, as shown in Figure 2.
Coupling-reducing design of parallel mechanism.
In order to better understand the connection between the links of the mechanism and the spatial configuration of the kinematic pairs, SolidWorks is used to draw the 3D model of the structure-decoupled parallel robot as shown in Figure 3, which clearly shows the configuration of mobile platform, fixed platform, and four branched chains in space. The output motion of the moving platform represents the output motion of the whole machine. The green part in the picture can realize 3D movement and 1D rotation in space.

Three-dimensional sketch of decoupling mechanism.
The topological structures of the branched chain after decoupling are
1. Determining the DOF and POC set of the first loop

2. Determining the DOF and POC set of the second loop

3. Determining the DOF and POC set of the third loop

Therefore, the constraint degrees of each loop are given as follows

Therefore, the coupling degree of the coupling-reducing mechanism can be obtained as follows

From the above analysis, it can be seen that the coupling degree of the parallel mechanism is 1, and the forward position solution of the mechanism can be obtained by 1D search method.
The forward and inverse kinematics of parallel mechanism
As shown in Figure 4, the moving platform is set as an equilateral triangle, and the fixed platform is a square. A moving coordinate system O’-XYZ is established in the center of the moving platform, where the X-axis is perpendicular to
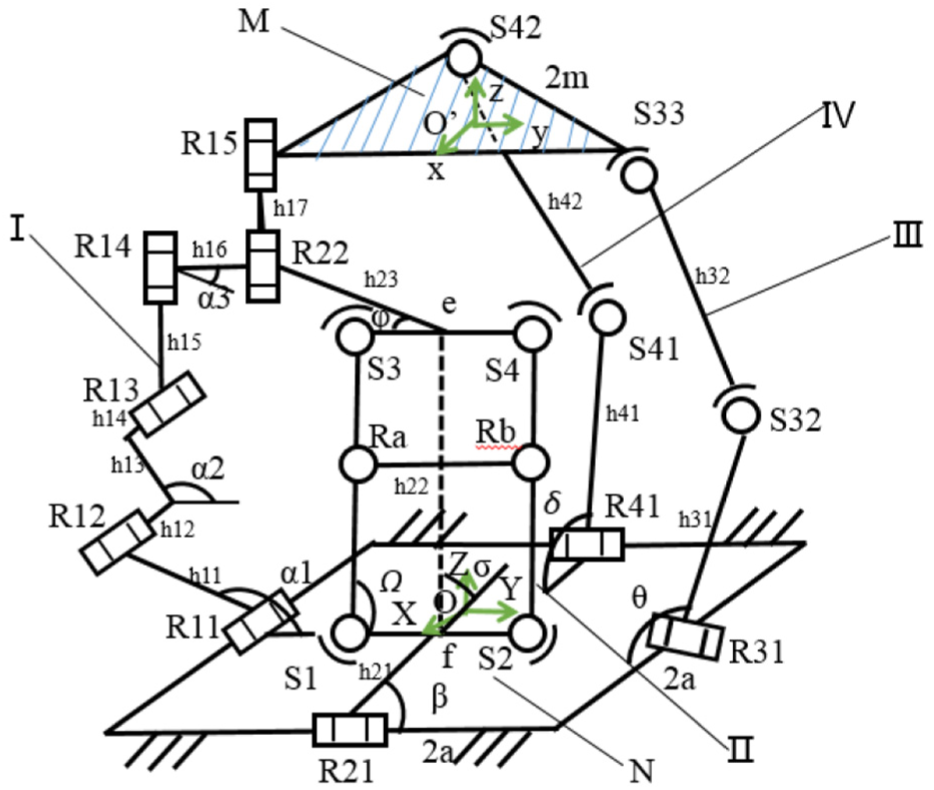
Kinematics model of coupling-reducing mechanism.
The structure parameters of the mechanism are as follows: the side length of the fixed platform is

Expanding top view of coupling-reducing mechanism.
Forward position analysis
Principle of position forward solution based on ordered SOC method
The constraint degrees of an SOC can be positive, negative, and zero, and their physical meanings are as follows: the
According to the aforementioned positive solution steps, the ordered SOC method can be used in 1D search to obtain the solution of decoupling mechanism. The specific steps are as follows:
For the first SOC,
For the second SOC,
Similarly, the rod constraint equation
Solution of SOC with positive degree of constraint
For the branched chains with topological structure
According to rod length constraint relation

Then, we can obtain the following equation

Solution of SOC with zero degree of constraint
The coordinates of

According to rod length constraint relation



In the above equation



Thus, the next relationship can be obtained

Solution of SOC with negative degree of constraint
The coordinates of
Similarly, based on the rod length constraint condition

By changing the value
The inverse solution analysis
For this mechanism, the inverse problem can be summed up as follows: when the position
Solution of input angle
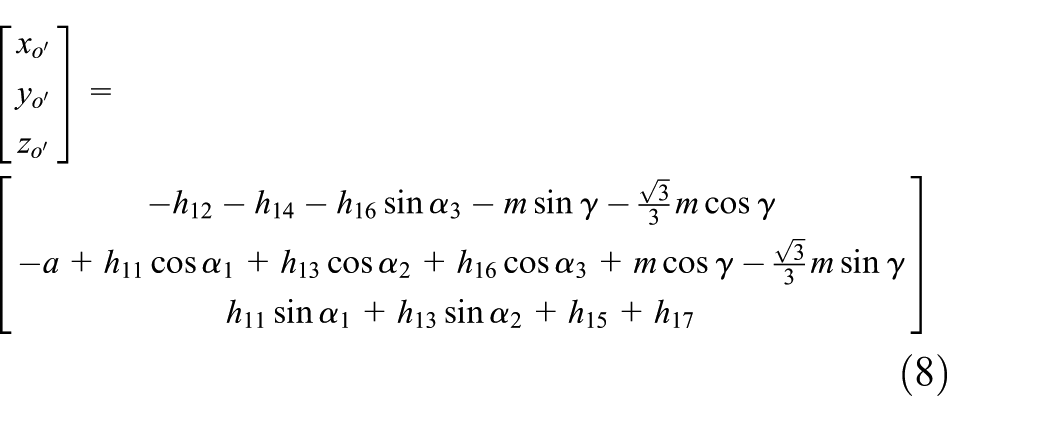
According to equation (8), the x coordinates of

Then
According to equation (8), the


Then, we have


where

To eliminate

where

We can understand the following formula

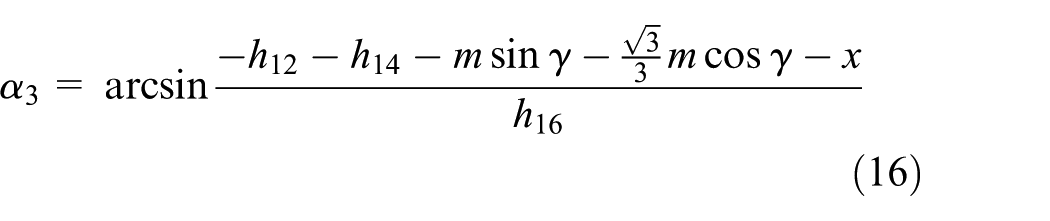
Thus, the input angle
Solution of input angle
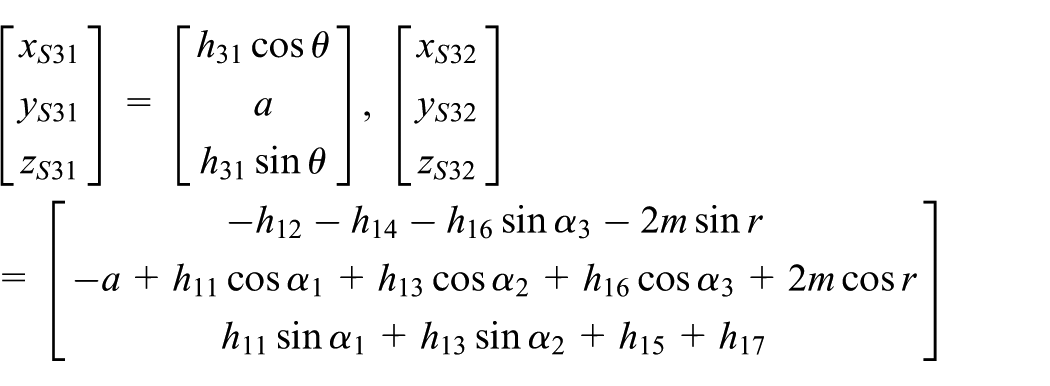
According to the topological structure
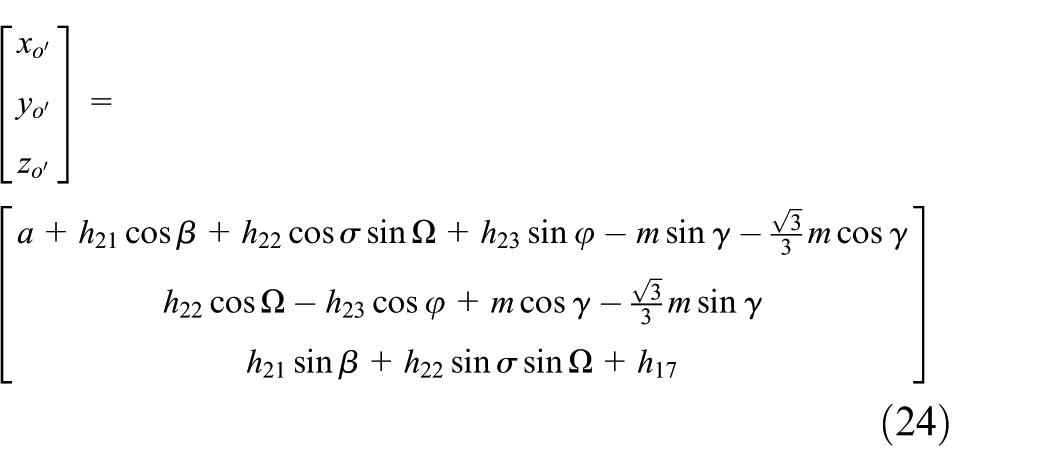
According to equation (24), the y coordinate of


According to equation (24), the


Then, we have



The elimination of


In the above equation

We can understand the following formula

Thus, the input angle
Solution of input angle
The coordinates of

According to rod length constraint relation

where
We can understand the following formula

Thus, the input angle
Solution of input angle
The coordinates of
According to rod length constraint relation

where

We can understand the following formula

Thus, the input angle
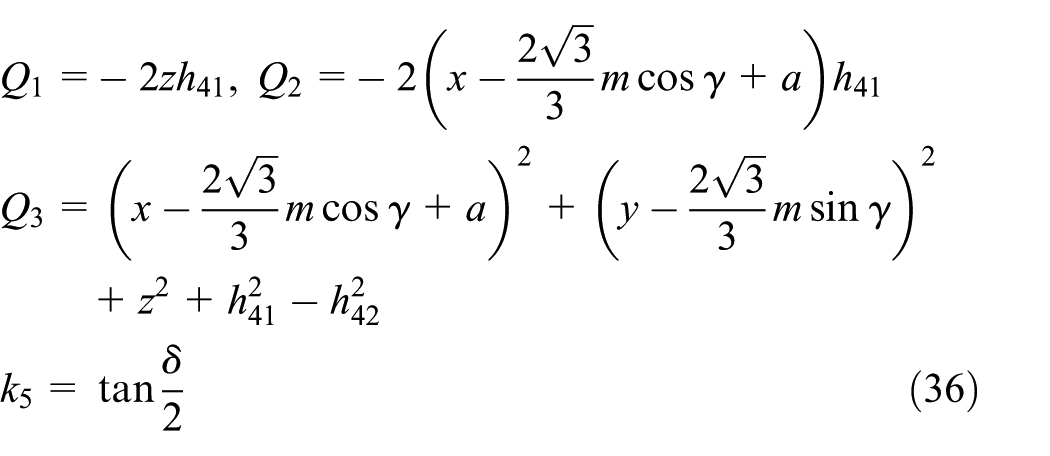
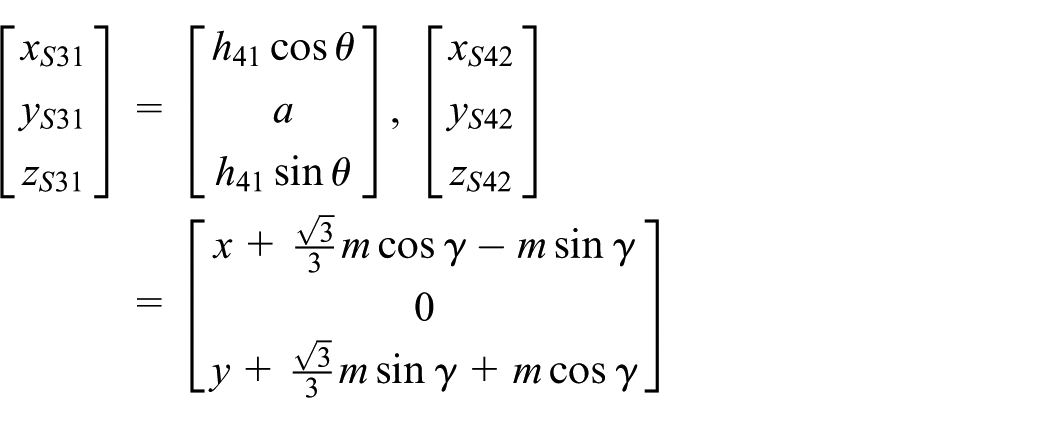
Verification of forward and inverse solutions
The structural parameters of a given parallel mechanism are
When the virtual variable
Numerical solutions of direct kinematics.
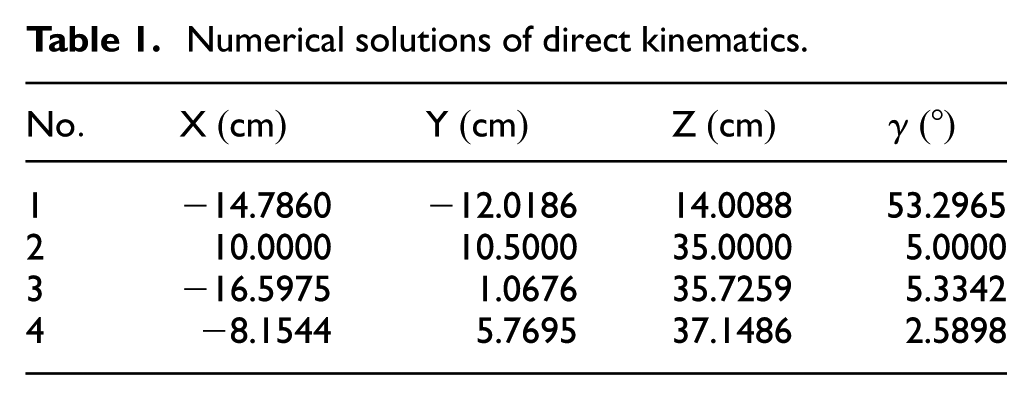
The second set of forward solutions is substituted into the inverse equations (15)–(40), and 16 sets of inverse solutions of
Numerical solutions of inverse kinematics.
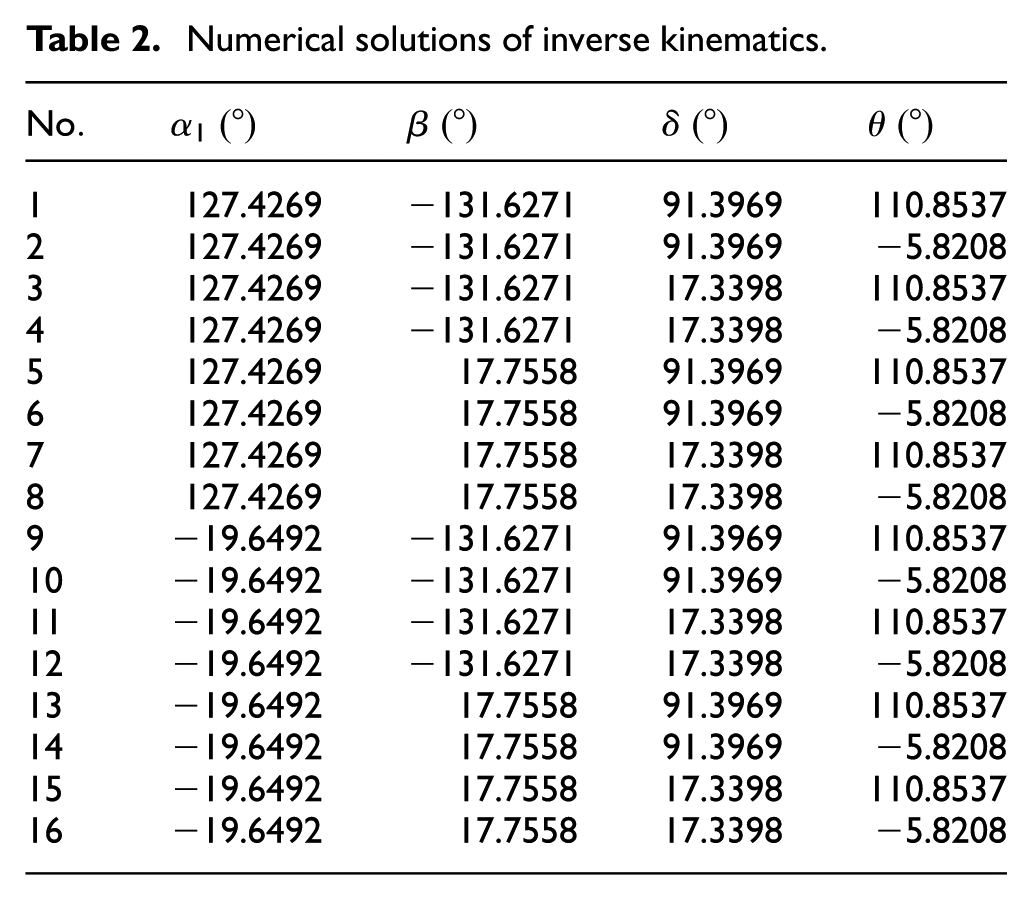
It can be seen from the fifth set of data values that it is consistent with the input angle value, which proves the correctness of the direct and inverse solutions. In most cases, the inverse and the forward kinematics are the key to kinematics analysis and control of parallel robots, so the forward and inverse kinematics analysis of robots is not only an important part of the follow-up analysis but also the basic link of the mechanism research.
Workspace analysis
Workspace is an important index for measuring the working characteristics of robots. At present, the methods of workspace analysis mainly include Monte Carlo method, 23 polar coordinate search method, 24 and graphic method. 25 The workspace analysis of the decoupled mechanism is an indispensable work and an important prerequisite for the study of such mechanism.
The forward solution of parallel robots has great complexity, while the inverse solution is relatively simple. In this article, inverse kinematics is used to solve the workspace of decoupling robot. In solving the workspace of symmetrical and asymmetrical mechanisms, because of the irregularity of the workspace of mechanisms, it is almost impossible to use analytical and graphical methods. The numerical rules provide a very simple solution step.
According to the set of parameters, the searching limits are

Workspace section of coupling-reducing mechanism: (a)
Figure 6 shows that the workspace of parallel mechanism becomes larger and larger with the increase of cross-section, and there is no cavity in the workspace. The area in the lower-right corner of the workspace is basically S-S symmetric because the two unrestricted branches RSS act on the workspace the same way. In the upper-left corner of the workspace, the S-S asymmetry of the diagonal line is obvious, which is caused by the different structures of branched chains I and II.
In order to evaluate the performance of the 4-DOF parallel robot and other parallel mechanisms with three translations and one rotation, we can use the total workspace size to characterize its working ability. Here, we use the polar coordinate search method to obtain the workspace volume of the mechanism. The basic idea of solving parallel mechanism workspace with numerical method: using the plane that is parallel with XOY, the workspace is cut into a series of micro molecular spaces, with thickness of
Any points on the bottom boundary of each micro molecule space can be expressed in polar coordinates
According to these boundary points, the cylinder can be divided into several small differential regions, which are labeled as

Therefore, the bottom area of the cylinder can be obtained by the superposition of all the differential sectorial areas, and the volume
Therefore, the workspace of parallel mechanism is as follows

The workspace volume of Cross IV-3 mechanism is 4.4274 × 108 mm3 by obtaining the mechanism parameters of document; 26 however, the workspace volume of coupling-reducing mechanism is 4.831 × 108 mm3. Therefore, the workspace of the coupling-reducing mechanism is 8.35% larger than that of Cross IV-3. It proves that the mechanism has greater flexibility in space.
Conclusion
In this article, a new type of asymmetric parallel robot is proposed based on the theory of POC set, which can realize 3D movement and 1D rotation.
It is found that the coupling degree of the parallel mechanism is 2, and its kinematics, dynamics, and control are very difficult. Therefore, the structure-decoupling method is used to reducing the coupling degree. The coupling degree of the coupling-reducing mechanism was reduced to 1, which can be easily controlled.
Aiming at the difficulty of solving the forward solution of parallel robot, the forward solution of the mechanism is obtained by using ordered SOC method, and the correctness of the forward and inverse solution is verified by an example.
Through the inverse equation of the parallel mechanism, the workspace of the robot is plotted. It can be seen that the parallel robot has a larger workspace, and the influence of the branch chain on the workspace of the robot can be observed intuitively. Simultaneously, there is no void phenomenon in the workspace, so that the continuity of machining process can be ensured.
The decoupling mechanism consists of two unconstrained branched chains, which are simple in structure and easy to manufacture. Because of this, they have certain research and development value.
In order to evaluate the performance of the proposed parallel mechanism, the workspace volume of the mechanism is obtained using the polar coordinate search method, and the rationality of the proposed mechanism is proved by comparing it with the parallel robot of CrossIV-3 under the same parameters.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was financially supported by National key R & D projects under Grant No. 2017YFC1702503 and the National Natural Science Foundation of China under Grant No. 51565021