
Abstract
The accuracy of pushing displacement of hydraulic support determines the pushing ability, which is the key factor that affects the pushing straightness of the hydraulic support. In order to further improve the accuracy of pushing displacement, considering the inertial sensor as the tools for measuring the pushing distance, an improved filtering method is proposed based on the improved fruit fly optimization algorithm and Kalman filter. The parameters of the Kalman filter, processing noise covariance Q and observation noise covariance R, are optimally designed by the improved fruit fly optimization algorithm to accurately perceive the inertial data. Finally, the feasibility of the proposed method with tuning the Q and R has been verified by comparing with the tuning results of other algorithms. An integrated filtering design method of pushing distance and key parameter analysis of algorithm in the pushing distance perception of hydraulic support are formed, which have theoretical and practical values, and improve the automation level of hydraulic support and the straightness of the fully mechanized coal mining working face.
Keywords
Introduction
As important mechanized mining equipment, the hydraulic support, scraper chain conveyor, and shearer are usually used to exploit and transport coal in high-efficiency coal mining, which directly impacts the automation and intelligent level of fully mechanized mining face.1–3 In the process of coal mining, the shearer is walking on the scraper chain conveyor. Therefore, it is evident that the straightness of the scraper chain conveyor directly affects the working efficiency of the shearer. 4 More importantly, the straightness of the scraper chain conveyor affects the service life of scraper chain conveyor and the chute, which, especially, reduces the efficiency of coal production.5,6 At present, the pushing distance is measured by a displacement sensor embedded in the hydraulic pushing cylinder. However, there are some fatal flaws in this method of measuring the distance of movement. Because the displacement sensor is embedded in the hydraulic pushing cylinder, it cannot be replaced. As a consequence, once the sensor is destroyed or failed, it will not be replaced; only when the mining tasks are finished, the whole hydraulic cylinder will be replaced, which will affect the coal mining efficiency. In addition, the accuracy of displacement measured by this method is not high, which results in large measurement error. Therefore, considering the accuracy of measurement estimation and the complex working conditions in fully mechanized mining face, an inertial sensor is proposed and applied for measuring and estimating the pushing distance of hydraulic support.
As the development symbol of inertial navigation technology, inertial sensor plays a core role in applications 7 and is gradually applied in various industries. Inertial sensor is mainly including accelerometers and angular velocity sensors, which have the characteristics of small size, low cost, and small power consumption. Inertial sensors are widely applied in navigation,8,9 industrial automation, 10 robotics, 11 and construction machinery. 12 They are initially applied to aircraft navigation systems. 13 With the development of microelectronic technology, integrated circuit technology, 14 and processing technology, 15 inertial sensors are growing popular in scientific research 16 and entertainment technology. 17 However, there are still some shortcomings about inertial sensor, such as the accumulated errors existing in displacement estimation. Therefore, it is urgent to propose a method to eliminate accumulated errors to improve the measurement accuracy of inertial sensors.
Kalman proposed the Kalman filtering method in 1960, 18 which was for linear filtering and prediction problems. 19 The Kalman filtering method is a time-domain method, 20 which introduces the concept of state space into the theory of random estimation. The signal process is regarded as the output of a linear system under the effect of white noise, and the input–output relationship is described by the state equation. 21 The system state equation, observation equation, and white noise excitation are utilized to form the filtering algorithm in the estimation process, which is processing noise and observation noise. The researchers also proposed some mutation of the Kalman filter, for example, the extended Kalman filter 22 and unscented Kalman filter. 23 The Kalman filter contributes to navigation guidance,24,25 target positioning and tracking, 26 satellite attitude determination, 27 communication and signal processing,28,29 mineral exploitation, 30 and fault diagnosis, 31 as well. Unfortunately, the values of the processing covariance matrix Q and the observation covariance matrix R are randomly selected in actual application, which has a serious influence on the estimation performance of the Kalman filter; 32 thus, it is very valuable to research on tuning Q and R. 33 Therefore, it is necessary to propose an optimization algorithm to optimize covariance parameters and obtain better estimation performance.
In recent years, many meta-heuristic algorithms have been gradually proposed to solve some problems in various fields, such as genetic algorithm (GA), 34 bat algorithms, 35 cuckoo search algorithms,36,37 particle swarm algorithm, 38 and Virus Colony Search (VCS) algorithm. 39 In 2012, Pan Wenchao proposed a new intelligent optimization algorithm, fruit fly optimization algorithm (FOA). 40 On the basis of the advantages of fast convergence rate and simple structure, FOA is widely used in target prediction, 41 path planning, 42 economic management,43,44 and so on. Nevertheless, the original FOA has a shortcoming of the fixed fly step size, which may sink into local optima.
Bearing the above observations in mind, this article aims to use inertial sensors to measure the inertia information for pushing distance of hydraulic support to overcome the disadvantages of difficult replacement and low reliability of previous ways. And an improved fruit fly optimization algorithm (IFOA) is proposed to optimize the parameters of the Kalman filter, named the IFOA-KF, which is used to process the inertial information for pushing distance. To jump out of the local optima, the basic FOA is modified by adding the inertia weight of the search step range when falling into a local extreme.
The remaining parts of the article are organized as follows. Section “Basic Theory” introduces the basic theory of Kalman filter and FOA methods, and presents the Kalman filter in detail. Section “The Proposed Method” describes the framework of the proposed method, and a fly step range (FR) improved by inertia weight is performed to optimize two parameters of Kalman filter. Section “Experiment and Application” provides some examples and comparisons of IFOA-KF with other methods and tests the proposed filtering method, and an application is performed. Section “Conclusion” gives the conclusions of our article and proposes some future work.
Basic theory
This article mainly involves two aspects of research: Kalman filtering algorithm and FOA. The relevant theory is summarized as follows in this section.
Kalman filter
The Kalman filter is an optimal recursive data processing algorithm and can get the best results, highest efficiency, and even the most useful for many problems. In recent years, Kalman filter is widely used in many fields, including robot navigation and control
45
and radar tracking system.
46
The Kalman filter consists mainly of two stages: forward prediction and measurement correction. The pushing process of hydraulic support is discrete dynamically in fully mechanized coal mining working faces; thus, the hydraulic support’s pushing distance and velocity are expressed by the state vector
Forward step prediction
The forward step prediction estimate is to predict the new best estimation of present state, based on the system’s process model, and the optimal result of the previous state; the process equation is shown as

where the system state vector
Considering the variance of

where
Update estimate
The update estimate phase is the process of filter’s optimization based on observations on the current state, which is essential for accurate estimation of measurements, and the measurement equation is

where H is measurement matrix,
Kalman gain has a great influence on propagating the recursive procedure, which effectively improves the accuracy of the measurements. The Kalman gain is shown as follows

According to the predicted values and measured values, the optimal estimation value

Finally, the error covariance at time

Generally, the processing noise covariance and measurement noise covariance are set according to the measurement experience in the Kalman filtering process, which often causes large estimation errors. Therefore, this article optimizes the selection of Q and R by the optimization algorithm and achieves the optimal estimation based on Kalman filtering.
FOA
FOA is a swarm intelligence algorithm based on fruit fly foraging behavior seeking global optimization, which was proposed by the Taiwan scholar Wen-Tsao Pan in 2012. They fly to the direction of food by their sense of smell, find the location of food and other populations by their visual sense, and fly to them. The FOA aims at improving the diversity of fruit fly individuals, increasing the individual search space, and accelerating the speed of individual convergence by using the sharp smell of drosophila. The global optimization can be obtained via an appropriate iteration. The procedure of basic FOA can be summarized as follows, and the schematic diagram is shown in Figure 1.

Fruit fly group iterative search food sketch map.
Step 1: Establish and initialize the parameters. The key parameters of initial setup are population size PS, fly distance range

Step 2: Initialize the direction and distance. The distance and direction in the search for food smell are randomly given as follows

Step 3: Calculate the smell concentration judgment value. Since it is impossible to know the location of food, the distance from the origin

Step 4: Compare the smell concentration value. Smell concentration judgment value

where
Step 5: Preserve the best smell concentration value. Comparing the new smell concentration with the previous best smell concentration, the current position is retained if the current generation is superior to the previous generation, and the concentration values and coordinates to be retained are shown as follows

Otherwise, repeat execution Step 2 to Step 4 to find other better smell concentrations.
Step 6: Iteration of the loop. When the smell concentration satisfies the requirement of accuracy or reaches the maximum iteration number
The proposed method
In this section, the framework of the proposed method is proposed, and the flowchart of IFOA method is also described. To reduce the estimation error of Kalman filter, an IFOA is proposed and used to optimize the process noise covariance Q and observation noise covariance R. The whole process of estimating the pushing distance of hydraulic support based on IFOA-KF is proposed.
IFOA
The basic FOA search ability and convergence speed are affected by the FR. When the number of drosophila population is certain, with the increase of FR, the global search ability of the algorithm will be stronger, which will lead to a decline in the local optimization ability. On the contrary, if the FR is too small, the local searching ability of the fruit fly is stronger and the search space is smaller. The global search ability is weak but getting into local optimum is easy. Thus, the selection of step range directly affects the execution efficiency of the algorithm. Therefore, when the fruit fly algorithm is used to solve practical problems, it is necessary to choose the appropriate step range to make it not only have global search ability to avoid local optimal but also have better local optimization ability, in order to improve the search precision.
In order to tackle this problem, the inertia weight of FR is processed to trade off between search speed and the global search ability of basic FOA. The FR of basic FOA is fixed and expressed by FR, while the FR of the IFOA is dynamic and expressed by FR′, and FR′ is the product of FR and the inertia weight. At the beginning of the iteration, IFOA has a larger search step range by weight adjustment. With the iteration number of fly fruit algorithm increase, the search step range decreases with the 1/4 circle curve and the local search ability of the algorithm increases. At the end of the iteration, the search step range is reduced by small weighted values and makes the algorithm achieves the maximum search precision. In this way, FOA has a faster convergence rate and better global search capability, but it does not fall into local optimum. This algorithm realizes the balance between global search ability and local optimization ability. The proposed inertia weight functions are shown as


where

Inertia weight change curve: (a) linear change and (b) nonlinear change.
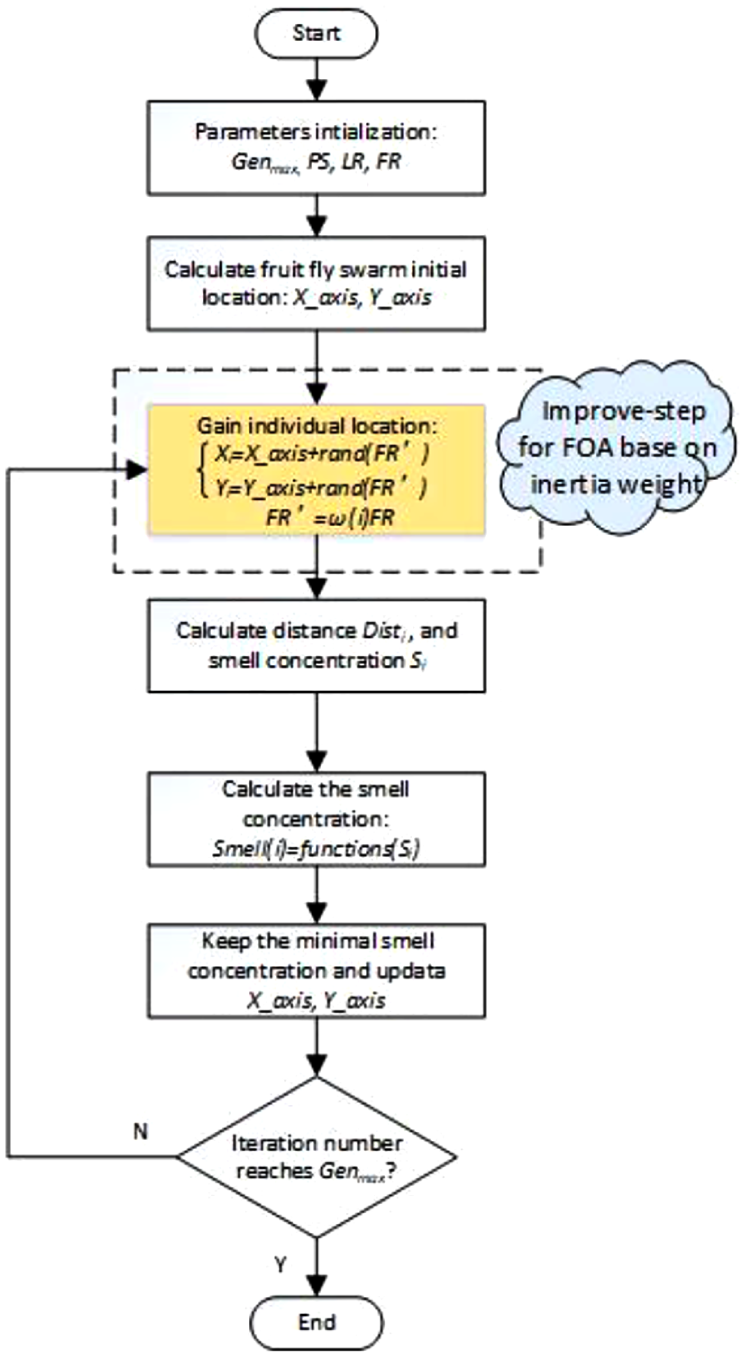
The flowchart of the improved FOA (IFOA).
IFOA for parameters selection of Kalman filter
The stochastic linear discrete system can be described by the difference equation and the discrete observation equation with the system process noise and the observed noise, that is, the state equation and the observation equation of the system. In the mathematical model of the above linear discrete system, the parameters, observation noise covariance R and processing noise covariance Q, are uncertain and are generally assumed to be Gaussian white noise. Both the observation noise covariance and the processing noise covariance are unknown and need to be tuned for better estimation performance. The observation noise covariance is a statistical parameter and is closely related to the precision of the sensor. In this article, since the measured variable is the pushing distance of the hydraulic support, the observation matrix H is a vector and, thus, the observation noise covariance R is a scalar quantity. The processing noise covariance Q is difficult to obtain accurately, but it helps to inject uncertainty into the state equations and assist the filter to learn from the measurement. The processing noise is mainly caused by the acceleration of the inertial measurement unit (IMU); Q is also optimized as a scalar quantity.
Establishing system model
A state-space model should be needed before the position, and posture perception of hydraulic support is carried out. According to the actual working conditions of the hydraulic support, the target is uniformly rectilinear, the speed is
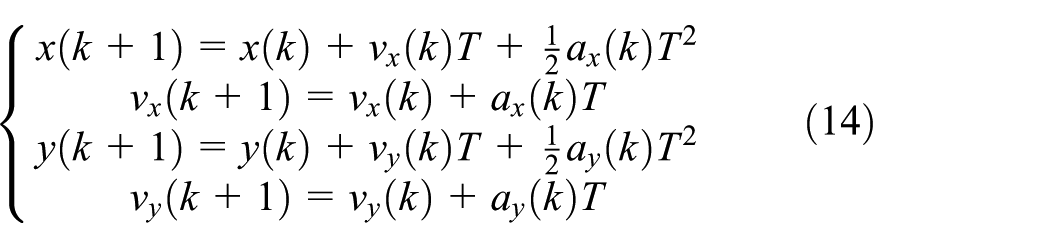
To express convenience, the state of the system is written as

Referring to equation (1), the above equations are linearized and the model parameters are expressed as

and
The measured value is the displacement,

where the vector
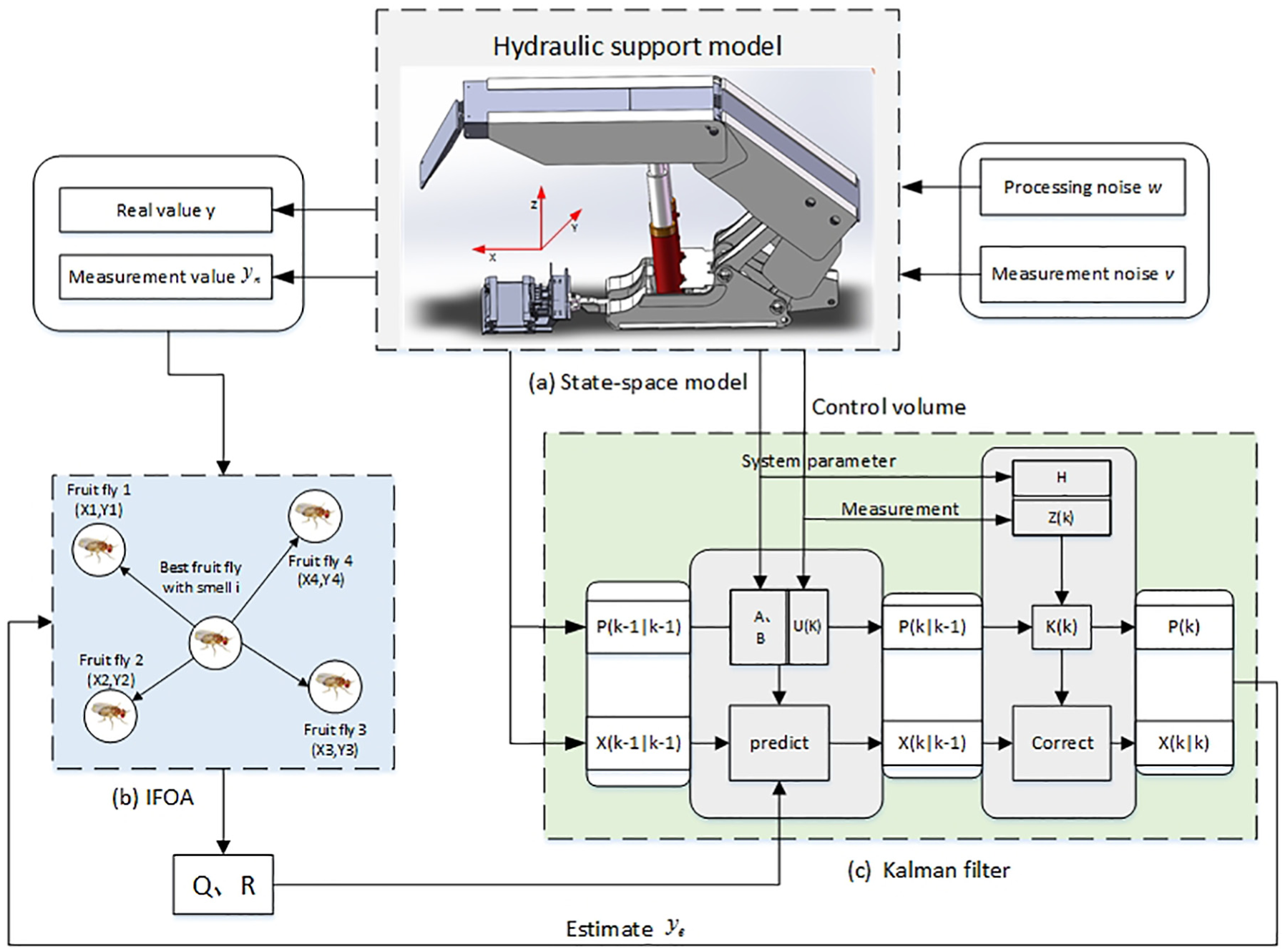
Block chart of the Kalman filter tuning procedure based on IFOA: (a) the state-space model for pushing distance estimation of hydraulic support, (b) the chart of proposed IFOA, and (c) the Kalman filter.
Determination of fitness function
According to the working condition of the hydraulic support, to apply IFOA in pushing distance estimation, the fitness function is the key to adjust the Kalman filter. In this article, the fitness function is to get the better value of Q and R, resulting in making the output of Kalman filter to get lower mean squared error (MSE). Thus, the fitness function is selected and calculated as

where
Kalman filter
The block diagram of the Kalman filter tuning procedure based on IFOA shows all of the pushing procedures of hydraulic support, as shown in Figure 4. In this article, the acceleration signals

The flowchart of the IFOA-KF.

Experiment and application
In this section, the IFOA based on the weight changing is tested, and the proposed method IFOA-KF is used for signal denoising of the IMU. In addition, the method is applied to the denoising of pushing distance. In order to verify the performance and the search ability of the improved algorithm, a Schaffer function is applied, which has only one minimum point
Experiment configurations.

Algorithm performance testing of IFOA
In order to show that the IFOA is superior to the previous FOA, the Schaffer function is applied to search the only minimum point
The parameters of FOA are set as follows: population size = 20, maximum iteration number = 100, the initial location = [0,10], and FR = [–1,1]. The two IFOAs have the parameters, except for the FR and the original FR changes with the different inertia weights, as shown by equations (12) and (13). In addition, the performance comparisons of the FOA and IFOAs are illustrated in Figures 6–9. Obviously, the improved IFOAs had faster convergence speed than the original FOA at the initial stage of global search. In the late search, IFOA had higher search accuracy and more accurate finding of extreme value. The IFOA2 with inertia weights nonlinear decrement was getting faster and faster than the IFOA1 with inertia weights linear decrement, and surpassed the two algorithms at the sixth generation. The search route was shown in Figures 7–9; IFOA has a wider search route. Therefore, the performance of fly step, which improved based on inertia weights, was better.

The result of FOA based on different inertia weights.
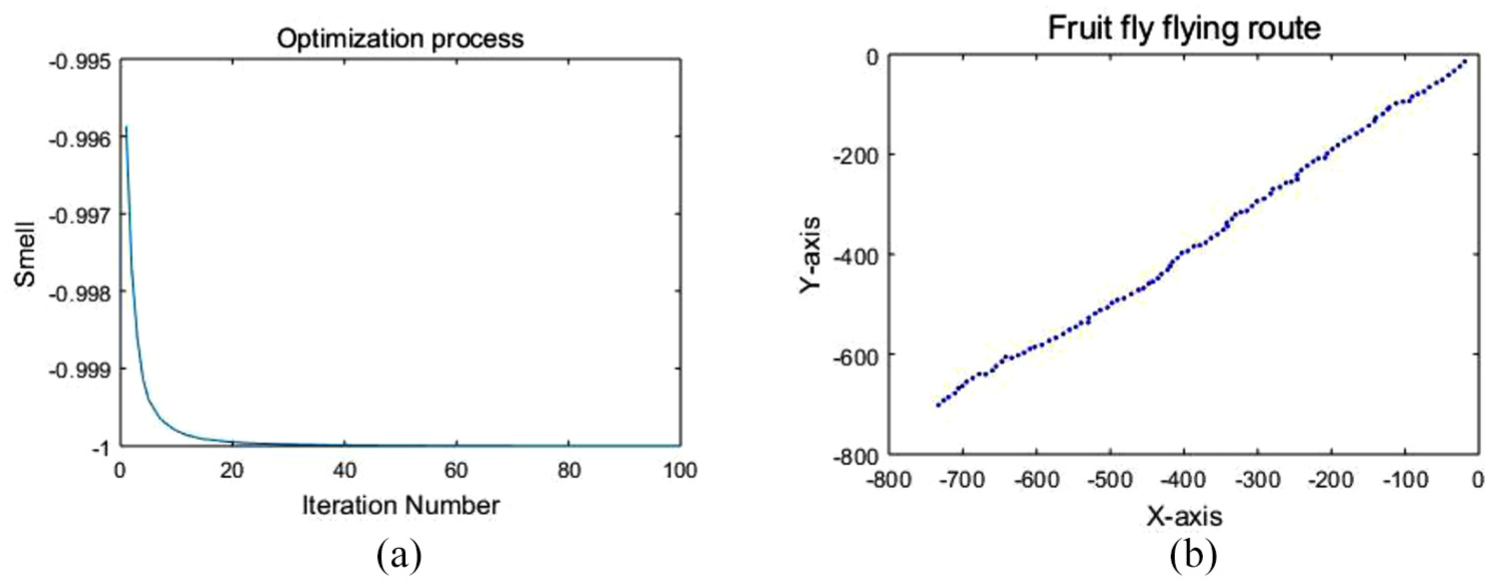
(a) Optimization process of FOA and (b) fruit fly flying route of FOA.
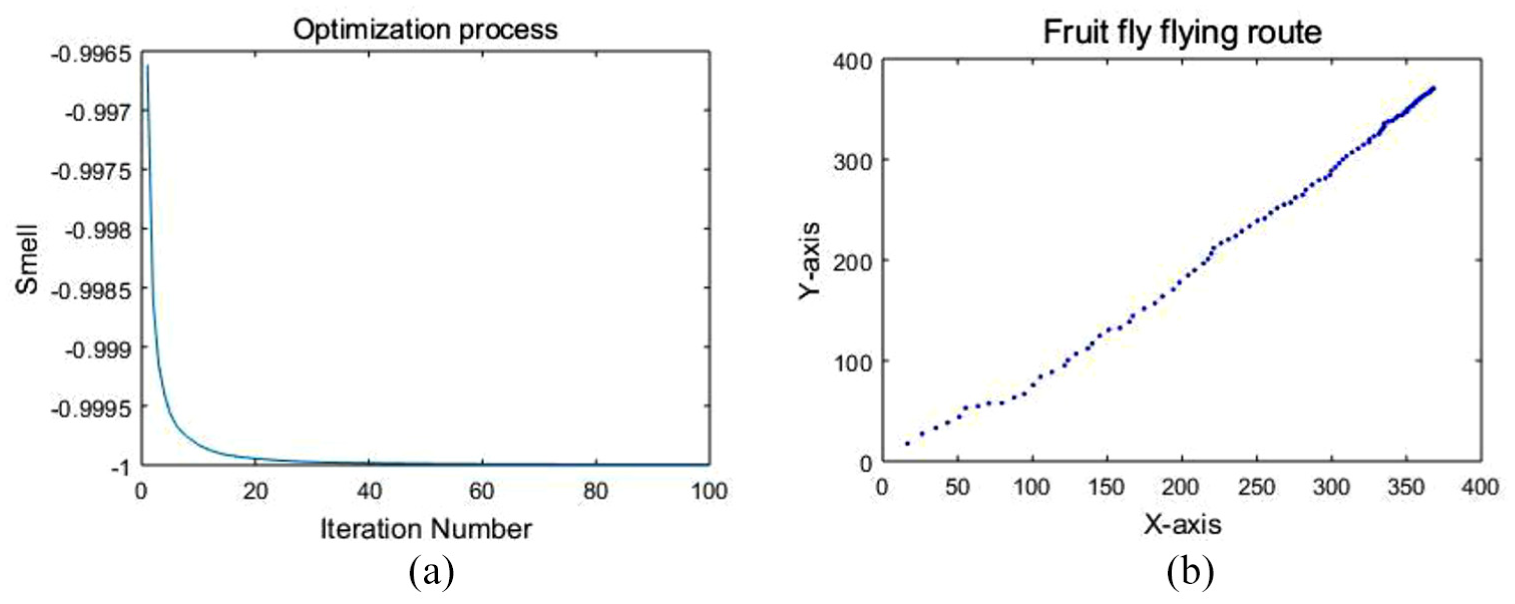
(a) Optimization process of IFOA1 and (b) fruit fly flying route of IFOA1.

(a) Optimization process of IFOA2 and (b) fruit fly flying route of IFOA2.
Experiment with artificial signal
To compare the filtering performance, in this experiment, Kalman filter is used to evaluate the pushing distance, and the different optimizations are selected to optimize the covariances Q and R with the same input acceleration. First, the Kalman filter tuning model is constructed based on pushing distance as shown in Figure 4. The input signal is the acceleration of gravity:
In this experiment, 3D-FOA and FOA are set as same parameters, and the parameters of the proposed IFOA are the same as above two algorithms except the inertia weight
Parameters of different algorithms.

PSO: particle swarm optimization; GA: genetic algorithm.
Two indices of MSE and time are used to measure the optimization capacity in the model, and the comparison of results is listed in Table 3.
Estimation results of different algorithms.

MSE: mean squared error; 3D-FOA: three-dimensional fruit fly optimization algorithm; GA: genetic algorithm; PSO: particle swarm optimization; IFOA: improved fruit fly optimization algorithm.
As seen from Table 3, the proposed FOA performs better training and testing properties than the basic FOA in optimizing the Kalman filter model, which gets the minimal MSE (0.03973). While the errors and running time of PSO and GA are larger and longer than the other three algorithms, respectively. The running time of the basic FOA is the shortest, but the MSE of FOA is not ideal. Compared with 3D-FOA, the IFOA has better estimation accuracy and computation time. Although the training time (6.3706 s) of the proposed IFOA is large than the basic FOA, the MSE is better than other algorithms. Offering comprehensive consideration of the prediction error and running time, the proposed IFOA predictor can perform better in evaluating the Kalman filter model.
As shown in Figure 10, the performances of PSO and GA are even worse, and the proposed FOA has better performance. As seen from the partial enlargement, the proposed FOA is little better than the basic FOA and 3D-FOA, but the difference is not obvious. However, as shown in Figure 11, the estimation errors reveal the difference, and, as illustrated in Table 3, the MSE of GA and PSO is 0.24784 and 0.31251, respectively, which are quite large. The MSE without the algorithm is 0.32623. The proposed FOA with a minimum of MSE = 0.03973 is the most efficient, which has improved more than 87% than the MSE without the algorithm.
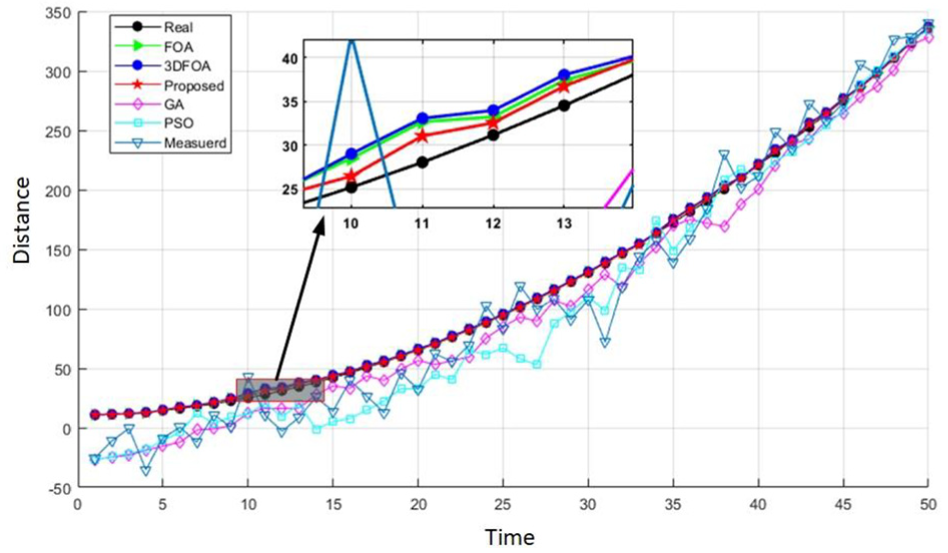
Estimation result based on different algorithms.

Estimation error based on different algorithms.
Application
In order to verify the application performance of the proposed method, an industrial test based on the proposed method is carried out on the application of pushing distance estimation of hydraulic support. The basic structure of the experiment configuration for industrial test is shown in Figure 12. The laser rangefinder sensor is used to measure the pushing distance of hydraulic support. An inertial sensor is used to measure the inertial information of the pushing link. The inertial sensor and the laser rangefinder sensor are installed as shown in Figure 12(a), and the signal acquisition system is shown in Figure 12(b). The theoretical pushing distance, velocity, and acceleration are obtained via the signal acquisition system when the hydraulic support is pushing from 0 to 800 mm, as shown in Figure 13.

Basic structure of the experiment configuration for industrial test: (a) the sensor installation on the hydraulic support and (b) the signal acquisition and processing system.

The data for pushing distance for hydraulic support.
The goal of the proposed IFOA-KF is to accurately remove the noise of pushing distance of hydraulic support, which can provide the basis for its automatic control. First, we use the proposed method to obtain the best processing covariance Q and observation covariance R based on the pushing distance obtained and the final optimized parameters
Second, through the optimal parameters
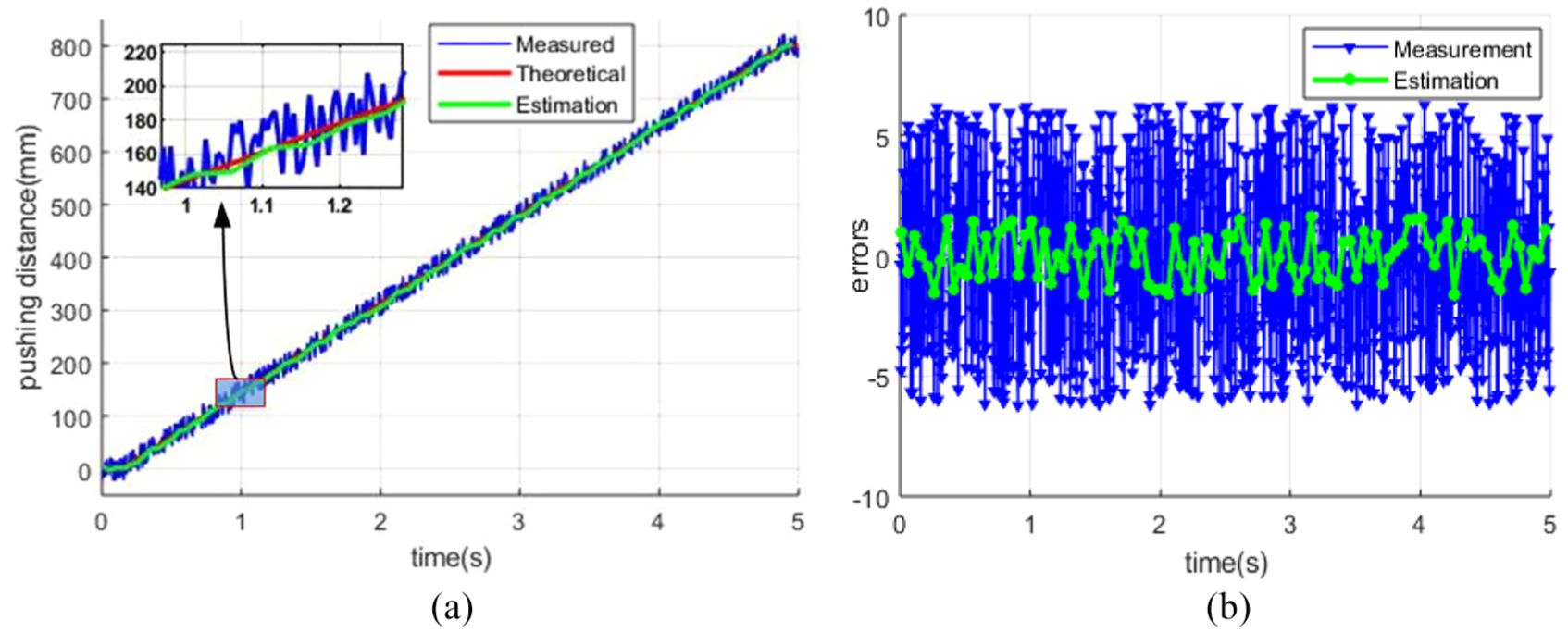
The estimation results of the experiment based on the proposed method: (a) the displacement evaluation and (b) the estimation error.
Conclusion
In this article, we propose a novel method for sensing accurately the pushing distance based on IFOA-KF. This proposed method uses the IFOA with inertia weight to automatically select the appropriate processing noise covariance and observation noise covariance of the Kalman filter in order to improve the measurement accuracy of the sensor. And the optimized Kalman filter is applied to estimate the pushing distance of hydraulic support. The proposed IFOA has a better performance; it is compared with the original FOA. Moreover, different inertia weights are tested, and the nonlinearly diminishing inertia weight has better algorithm performance. In order to validate the performance of the proposed method, other algorithms (basic FOA, 3D-FOA, GA, and PSO) based on the artificial signal are implemented as comparisons. The results showed that the proposed method outperforms other methods. Finally, the industrial application result indicates that the pushing distance is estimated accurately.
This work has a certain reference value for sensor signal processing, which provides a nonreference filtering denoising method. However, there are also some shortcomings. On one hand, the calculation duration is still a problem, although its calculation precision is high. On the other hand, it is still a challenge to eliminate the cumulative error. To surmount these shortcomings, the authors intend to improve the method with more effective intelligence algorithms and use multi-sensor fusion to eliminate accumulated error. In addition, applications of the proposed method in the coal shearer inertial navigation are also worth further study.
Footnotes
Handling Editor: James Baldwin
Author’s note
Zhongbin Wang is also affiliated with Jiangsu Engineering Technology Research Center on Intelligent Equipment for Fully Mining and Excavating, Xuzhou, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (Nos U1510117 and 51605477) and the Priority Academic Program Development (PAPD) of Jiangsu Higher Education Institutions.