
Abstract
Transfer matrix method is a practical technology for vibration analysis of engineering mechanics. In this article, a new version of mixed differential quadrature discrete time transfer matrix method is presented for simulating vibrations. First, ordinary differential equations of the substructure or the element of a mechanical system are determined by classical mechanics rules or the finite element method. These ordinary differential equations can be transformed to a set of algebraic equations at some discrete time points by the application of a differential quadrature method. After extending the state vector of the transfer matrix method, new transfer equations and transfer matrices of the substructures (or elements) of a mechanical system are developed finally. Riccati transformation is used to improve the computational convergence of the method. Several numerical examples show that the proposed method can be regarded as an efficient tool for transient response analysis of vibration systems.
Keywords
Introduction
The transfer matrix method (TMM), as a classical technology for computational mechanics, has been proposed and first applied to analyze structural systems. 1 Compared with other matrix methods of structural analysis, such as the displacement method and the force method, TMM uses both displacements and internal forces at nodal points of the structure. 2
Later, many improvements and applications of TMM have been found from a science research and engineering technology point of view. For science research, the Riccati transformation can be regarded as an important tool to improve numerical stability of transfer computation. 3 In order to increase the application field of TMM, by combining finite element method and TMM, the finite element transfer matrix method (FE-TMM) has been developed to analyze vibrations of a plate structure, 4 the dynamics of orthogonally stiffened structures, 5 and bending/buckling problems. 6 A new form of TMM for the transient response analysis of large dynamic systems is proposed and named as discrete time transfer matrix method (DT-TMM), which owns second-order computational precision if one-step numerical time integration schemes, such as the Newmark β method or Wilson θ method, are applied. 7 A combination of TMM and a first-order, second-moment approach is used to perform dynamic analyses of structures with uncertain parameters. 8 By taking the control and feedback parameters into account, defining new state vectors and deducing new transfer equations and transfer matrices for the actuator, controlled element, and feedback element, DT-TMM for controlled multibody systems (CMSs) is developed to study dynamics of CMS with real-time control. 9 For engineering technology, all kinds of TMMs can be developed and applied to resolve the different engineering issues, such as natural vibration characteristics of symmetric cross-ply-laminated composite beams, 10 linear multibody systems including continuous and lumped elements, 11 beams with distributed internal viscous damping, 12 fluid-filled pipelines with any branched pipes and fluid–structure interaction, 13 thick cross-ply-laminated composite cylindrical shells, 14 and in-plane dynamics of a suspension bridge; 15 transient response of a large complex nonlinear rotor-bearing system, 16 multibody system dynamics with second-order computational precision, 17 elastic beam with large overall spatial motion, and nonlinear deformation; 18 two-dimensional acoustic systems with several sources 19 and transmission properties of elastic waves propagating in a three-dimensional composite structure embedded periodically with spherical inclusions; 20 the control system of large flexible structures 21 and heat transfer performance of multireentrant honeycomb structures; 22 and inverse problem of determining the location and depth of multiple cracks beam 23 and self-healing hybrid composite beam under moving mass. 24 So, we can believe that TMM has become a powerful tool for the sound and vibration analyses of engineering mechanisms and structures nowadays. However, as already mentioned, the DT-TMM based on a one-step integration method only has second-order computational precision. 25 In order to improve the computational precision, the differential quadrature (DQ) time integration technology will be applied in this investigation.
Differential quadrature method (DQM), as a rather efficient numerical method, 26 can often yield numerically exact results of linear and nonlinear partial differential equations. 27 It originates from Bellman and Casti to resolve long-term integration problems, 28 and the works about the theory and application of DQM before 1996 have been reviewed. 29 The strong formulation of the finite element method, which uses DQM for the discretization of the equations, and the mapping technique for the coordinate transformation from the Cartesian to the computational domain were also recalled. 30 Now, a lot of achievements about DQM can be found. However, only the DQ time integration method will be summarized here. Perhaps, Chen 31 is the first one to use DQM for time integration. Later, DQM and the generalized DQM were used to solve dynamics problems with 1 degree of freedom (DOF), 32 initial-value differential equations of second to fourth order, 33 and nonlinear differential equations of Duffing-type. 34 Fung 35 proposed a new DQ-based time integration scheme for first-, second-, and higher-order initial value problems, 36 applied the Legendre, Radau, Chebyshev, Chebyshev–Gauss–Lobatto, and uniformly spaced sampling grid points in time of DQM, 37 and established the equivalence of the time-domain DQM and the dissipative Runge–Kutta collocation method. 38 In order to solve time-dependent initial-value problems, a block-marching technique with DQ discretization was proposed. 39 Due to the numerical instability of DQ time integration, a variable-order approach, which can be characterized by the grid points near and far away from boundaries of different DQ schemes, was developed. 40 The spline-based DQM with explicit expressions for weighting coefficients of derivative approximations and least-squares DQM were developed for solving nonlinear initial-value problems 41 and an overdetermined system of linear ordinary differential equations in time, which is obtained from the application of the dual reciprocity boundary element method (DRBEM). 42 The DQM was used to discretize the equations in both space- and time domains for transient dynamic analysis of functionally graded cylindrical shells subjected to internal dynamic pressure. 43 In order to improve the numerical dissipation and phase error of the conventional direct integration method, a new DQ time element method was proposed for solving ordinary differential equations. 44 Compared to similar procedures, a DQ-based compact step-by-step integration method with unconditional stability was proposed to provide accurate results even if the step size is relatively large. 45 By extending DQM to time integration, many engineering problems can be solved by the method with different characteristics, such as various shock-excited scalar elastic wave problems, 46 the forced vibration of structural beams, 47 2-DOF systems with Duffing-type nonlinearity, 48 time-dependent structure dynamics with moving loads, 49 the nonlinear dynamic response of a rectangular laminated composite plate resting on nonlinear Pasternak-type elastic foundations, 50 and the in-plane dynamics of generally shaped arches with a varying cross section in undamaged or damaged configuration under different boundary conditions and external forces. 51 For an assessment of seven commonly used time-integration schemes for nonlinear dynamic equations, it is found that more accurate results can be obtained by the DQM with much larger time steps than with the common time integration schemes. 52 It should be noted that although the spatial approximations of partial differential equations are the main application fields of DQM, many researchers and scientists also paid attention to the DQ time integration technology as an efficient unconditionally stable method.
In this investigation, a new hybrid method will be proposed that combines DT-TMM and DQM, named as differential quadrature discrete time transfer matrix method (DQ-DT-TMM). The text is organized as follows: in section “DQ time integration,” the DQM, especially the DQ time integration method is given in brief. Section “Transfer matrices” will develop the general formula of DQ-DT-TMM. The algorithm for vibration analysis of DQ-DT-TMM will be discussed in section “Algorithm for vibration analysis.” Some computational results calculated by several methods are given in section “Numerical examples” to validate the proposed method. The conclusion is presented in section “Conclusion.”
DQ time integration
DQM is based on the idea that the derivative of a field variable at the ith discrete point in the computational domain is approximated by a weighted linear sum of the field variable along the line that passes through that point, which is parallel to the coordinate direction of the derivative. 27
DQ
Consider a one-dimensional function u(x) in the domain [–1, 1]. Suppose u(x) is continuous and differentiable with respect to x. So in DQM, the mth derivative of u(x) at point

where N is the total number of grid points
If Lagrange polynomials are adopted as test functions, the weighting coefficients of the first derivative of u(x) with respect to x can be obtained as 27

In the harmonic differential quadrature method (HDQM), 27 Lagrange harmonic interpolation polynomials are adopted as test functions, that is

resulting in

The weighting coefficients of the higher-order derivatives can be written by combining equation (2) (or equation (4)) and equation (1) as 27

where the variable m is the highest-order number which must be less than or equal to N – 1 generally.
The selection of sampling points plays an important role in the accuracy of the solution with DQM. 45 Generally, highly accurate and stable results can be obtained by using nonuniform sampling grid points. 35 The grid points are typically given in the domain [–1, 1] for simplicity and may be converted into other solution domains easily. 27 Here, five types of point grids are introduced as follows.
Uniformly distributed grid points:
Chebyshev–Gauss–Lobatto grid points:
Chebyshev grid points:
Gauss grid points: –1, xi = (N – 2) Gauss quadrature points (i = 2, 3, …, N – 1), 1
Gauss–Lobatto–Legendre integration points: extreme points of the (N – 1)th Legendre polynomial together with the two end points.
Once the sampling grid points are selected, the weight coefficients can be computed from equations (2) (or equation (4)) and (5). The computational precision and numerical stability of the simulation scheme will be affected by the weight coefficients determined by different sampling strategies.
Time integration based on DQ
Assume that the transient response of a system from zero to time T shall be calculated. This time domain can be divided into K uniform time intervals of size
In the time interval

by using equation (1), where

During step-by-step integration of the vibration problems,

where

In equation (8), the weighting matrices

We may substitute equation (8) into equation (10) to receive the acceleration vector

Summarizing equations (8) and (11), the velocity and acceleration vector can be expressed by displacement vector at time points
Transfer matrices
In the following, formulas for the lumped mass and linear spring–damper in one-dimensional motion as well as for truss and beam elements will be deduced for DQ-DT-TMM.
Lumped mass with one-dimensional motion
The dynamics equation of a lumped mass m undergoing a one-dimensional motion in x-direction shown in Figure 1(a) can be written as

where f is the applied force, and


Models of four basic elements: (a) lumped mass, (b) spring–damper, (c) truss element, and (d) beam element.
For the lumped mass, the displacement of the output point equals that of the input point, that is

Thus, equation (13) may be rewritten as

By defining the state vector as

equations (14) and (15) may be summarized as transfer equation

where the transfer matrix of the lumped mass undergoing one-dimensional motion based on DQ-DT-TMM is

It should be noted that equation (17) provides a linear relationship between the state vectors of input and output points for the time sequence
Linear spring–damper in one-dimensional motion
The equilibrium equation of a linear spring–damper in one-dimensional direction (Figure 1(b)) can be written as

and

where
By using equation (8), equation (19) becomes

or

With definition (equation (16)), equations (20) and (22) may also be summarized as transfer equation (17), where the transfer matrix of the linear spring–damper is

One-dimensional truss element
Next, the one-dimensional rod in Figure 1(c) with the cross-section area A and length L = 2a is considered. The axial displacements may be interpolated by Lagrange shape functions as 53

where the nodal displacement vector is defined as

and the shape functions are
Using the energy rule and equation (24), the stiffness matrix

where

where

Using equations (8) and (11), this can be rewritten and summarized as

where
By reordering these vectors as

equation (30) can be rewritten as

The 2(N – 1) + 1 state vector of the one-dimensional two-node rod at input I and output O points can be defined analogously to equation (16) as

From equation (33) we may deduce

to be solved for
By using the condition of displacement continuum and the law of action and reaction at a point, equations (35) and (36) may be summarized as equation (17) with transfer matrix

Beam element
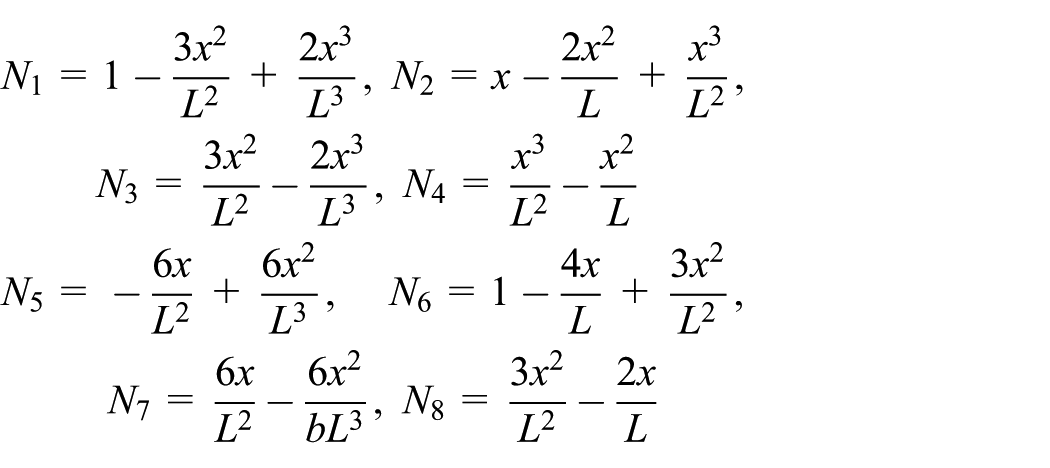
In order to extend the method to simulation of beam vibrations, the Euler–Bernoulli beam neglecting shear deformation and rotary inertia effects may be introduced in Figure 1(d). The displacements in z-direction and slopes

based on the nodal displacement vector

and the shape functions
Application of mechanics law results in dynamics equation (28) with stiffness and mass matrices

of the two-node beam element, where

which can be seen in Figure 1(d). The deduction of the corresponding transfer equation is similar to section “One-dimensional truss element.”
Algorithm for vibration analysis
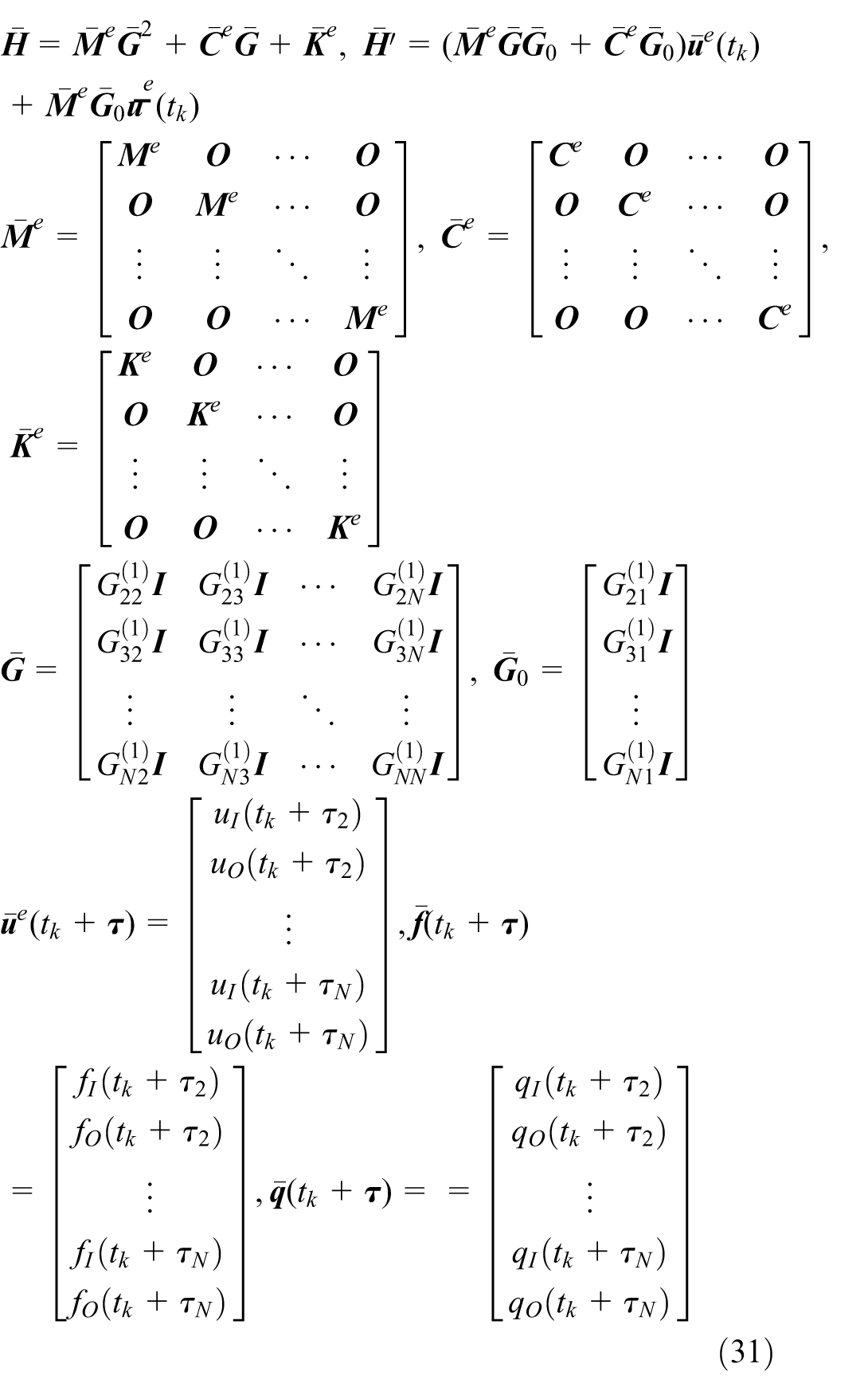
The global transfer equation of a chain system consisting of the

where the global transfer matrix of the system can be expressed as production of element transfer matrices

Generally, half of the components in the boundary state vectors are known. By resolving the algebraic equation (42), the other half of the boundary states can be obtained. However, with increase in the number
Riccati DQ-DT-TMM
To introduce the Riccati transformation into equation (17), the state vector can be divided into three parts

where

where

Substitution into equation (46) yields

or after rearrangement

With abbreviations

this may be simplified to

By substituting equations (46), (47), and (50) into equation (45), we can obtain

By comparing equation (47) with (51), recursive transfer equations can be deduced for


Equations (47), (49), (52), and (53) are the formulas of the Riccati transform matrix method.
Algorithmic analysis
In order to use equations (52) and (53) recursively, matrices

where
By using equations (52) and (53) repeatedly, the matrices

This is an algebraic equation reflecting the relationship between the state variables at system boundary, where half of the state variables summarized in
Algorithm process
According to the formulas given above, the motion quantities of a vibration system at different instants can be obtained as follows.
Decide the properties of the vibration system and the parameters of the computational method, such as the number
Set k = 1 and the initial conditions
According to the system boundary condition determining equation (54) and the element transfer matrices, the Riccati transform matrices
Solve equation (55) and obtain the unknown elements of last nodal state vector.
Compute state variable of all nodes at time
According to equations (8) and (11), compute the values of
Let
Numerical examples
Vibration of a spring–damper–mass system
Single-DOF system
In order to verify the method, first we compute the free vibration of a linear spring–damper–mass system with 1 DOF. The properties of the system are

Figures 2 and 3 show the displacement and the total energy at different time points for

Displacement curve by four different methods.
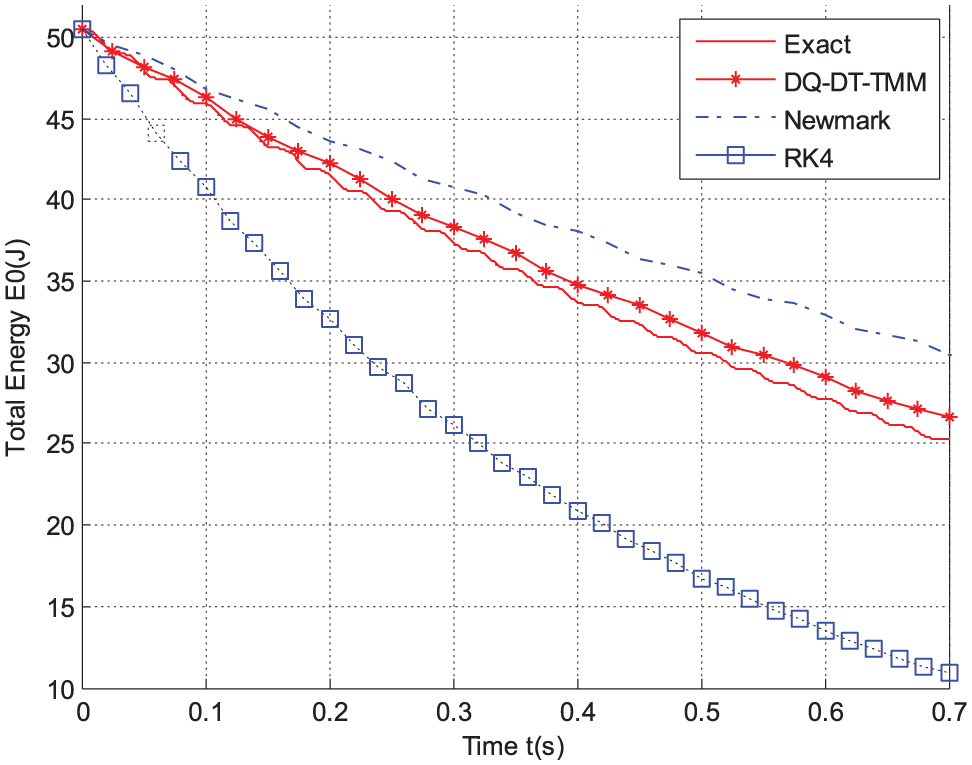
Total energy curve by four different methods.
Table 1 lists the absolute percentage errors of the systems total energy at end time
Absolute percentage errors in total energy of 1-DOF system at end time.

DOF: degree of freedom; DQ-DT-TMM: differential quadrature discrete time transfer matrix method.
In Table 2, different numbers N of grid points and grid point schemes from section “DQ” in DQ-DT-TMM and HDQ-DT-TMM are analyzed. Both DQM and HDQM in DT-TMM have similar computational features. The Gauss grid point scheme 4 has the best convergence performance along the increasing number of grid points
Absolute percentage errors in total energy of 1-DOF system at end time with
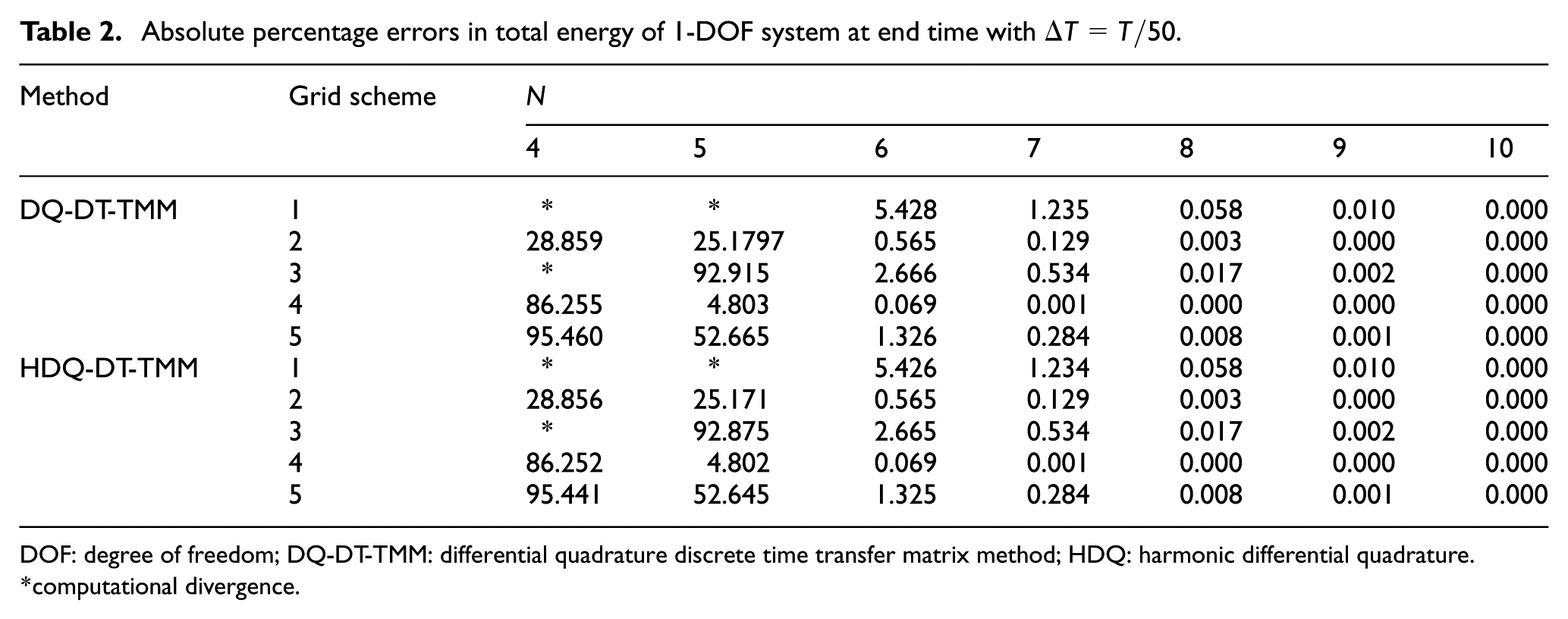
DOF: degree of freedom; DQ-DT-TMM: differential quadrature discrete time transfer matrix method; HDQ: harmonic differential quadrature.
computational divergence.
Multi-DOF system
The 3-DOF spring-mass system in Figure 4 may be regarded as an example of a multi-DOF system. Its structural parameters are

Three-degree-of-freedom spring–mass system.
From Figure 5, we can clearly find that the Newmark method and DQ-DT-TMM have worst and best computational precision among the three numerical methods, respectively. Table 3 showing errors of the mechanically constant total energy demonstrates that DQ-DT-TMM has a better conservative characteristic than the Runge–Kutta method when a large time step size is used.

System displacement curves for the 3-DOF system.
Absolute percentage errors in total energy of 3-DOF system at end time T = 5 s.

DOF: degree of freedom; DQ-DT-TMM: differential quadrature discrete time transfer matrix method.
Vibration of one-dimensional rod
An aluminum rod with Young’s modulus

Vibration models of two structure components: (a) impact on one-dimensional rod and (b) vibration of a slender beam.
Figure 7 shows the time history of displacement and velocity at the right end of the rod obtained by the fourth order explicit Runge–Kutta method, Newmark

Displacement (a) and velocity (b) curves of rod simulated by three methods and experiment.
Figure 8 presents a comparison of the CPU time for the three methods when the number
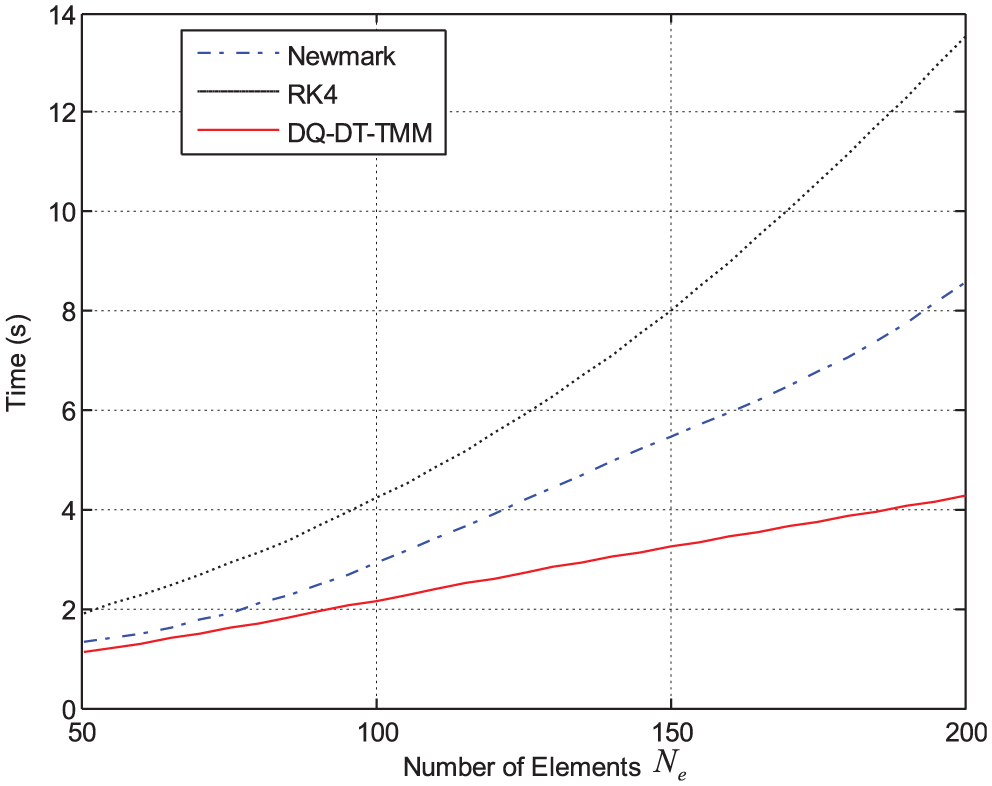
Comparison of the CPU time for impacted rod.
Vibration of bending beam
As shown in Figure 6(b), a vertical force is applied at the midpoint of the horizontal beam with two simply supported ends.

The beam is homogeneous, and its cross section is circular with diameter 30 mm. The length, density, and Young’s modulus of the beam are 3 m, 7810 kg/m3, and 71.08 GPa, respectively, where
The bending response of the beam can be obtained analytically
54
as well as by DQ-DT-TMM, Newmark

Displacement (a) and velocity (b) curves of the beam midpoint.
When the number

Comparison of the CPU time for the beam vibration.
Conclusion
By the combination of the DQ time integration method and the DT-TMM, a new method called DQ-DT-TMM is developed. Application to single- and multi-DOF systems as well as impacted rod and beam illustrates that DQ-DT-TMM is an efficient technology for simulating transient vibration responses. In order to state the basic idea of the method conveniently, the article is limited to linear vibrations. The nonlinear vibration for complex structures will be resolved in a forthcoming article. The highlights of DQ-DT-TMM are efficient computation, good numerical stability, and high calculation precision compared to Runge–Kutta and Newmark methods.
Footnotes
Handling Editor: Chuanzeng Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research was financed by Science Challenge Project in China (TZ2016006-0104), Natural Science Foundation of China (11472135), and Natural Science Foundation of Jiangsu Province, China (BK20130911).