This study first proposes an observer-based feedback linearization control of nonlinear multi-input multi-output systems with the input-to-state stability and almost disturbance decoupling characteristics, and summarizes an efficient algorithm for deriving the almost disturbance decoupling control. The state variables for the nonlinear dynamic equations generally are not available, and a state observer is applied to estimate the state variables. The existing approach solves the almost disturbance decoupling problem under the difficult sufficient conditions including the nonlinearities which are not globally Lipschitz and disturbances which appears linearly but multiplied nonlinearities. On the contrary, this problem can be easily solved via the proposed approach without those difficult conditions in this study. The generality of this approach and implications, due to the fact that unlike Jacobian linearization feedback linearization is not only locally valid, are also shown. The double rotor multi-input multi-output system mechanical structure is a laboratory equipment for some flying viewpoints and is investigated in this study to demonstrate the practical value of the proposed results.
The state feedback approach can be performed if the state variables are measurable in the general control theorems. If this condition does not hold, the state feedback controller can be built with the aid of a state estimator (observer) and the Luenberger observer, employing the measurable output, generally is performed. Based on this perspective, the main design task is to build observer-based state controllers and one generally utilize the separation principle and the two-stage procedure to calculate the observer-based gain matrices with inaccessible states. On the contrary, the unknown disturbance is another significant factor which will be considered into the observer design. The observers can be built by estimating both the system states and the disturbances and then the overall stability of the observer producing the state and disturbance estimation should be guaranteed.
Stabilization problem and tracking problem are important subjects in the research of nonlinear control, and the tracking problem is generally more complex than the stabilization problem. There currently exists many designing methods, including feedback linearization, variable structure control (sliding mode control), backstepping, model predictive control with a disturbance observer, regulation control, nonlinear control, internal model principle, and adaptive fuzzy control, of nonlinear systems for the tracking problem to be investigated. Variable structure control approach has been applied to solve the nonlinear system.1–3 However, the chattering phenomenon generates the unmodeled high frequency and inevitably drive systems to be unstable for variable structure control approach. Backstepping approach has been an efficient tool for some class of nonlinear systems. However, a disadvantage of the backstepping approach needs to calculate the complex repeated differentiations of some nonlinear functions.4,5 Model predictive control with a disturbance observer has been known to be one of the most important advanced control methods in industrial systems due to its optimized tracking performance and is applicable to arbitrary disturbance relative degree.6 The research results of Yang and Zheng6 are compared with this study, and the significant comparisons are summarized as follows: (1) the existing nonlinear model predictive control is not applicable to the mismatched disturbance situation. On the contrary, both Yang and Zheng6 and this study can solve the problem of this situation; (2) for the proposed method of Yang and Zheng,6 the disturbance can be completely eliminated from the output channel by appropriately designed interference compensation gain. Conversely, the use of this study can only almost eliminate the disturbance; (3) the estimator variables of Yang and Zheng6 are disturbances, and conversely, the estimator variables of this article are the state variables of the system; (4) when the state variables of the system are unmeasurable, the research method using Yang and Zheng6 cannot be solvable. On the contrary, the research method using this study is solvable; (5) solving the observer gain of Yang and Zheng6 requires to solve the differential equation. Conversely, solving the observer gain of this study only requires to solve a simple algebraic equation. Famous output tracking approach applies the structure of the output regulation control approach.7,8 However, the problem of the regulation control approach needs to solve the complicated partial-differential equation. Moreover, another problem of the regulation control approach is that the exosystem states, switching to describe changes in the output, will generate the transient errors.9 Above limitations of the output regulation control approach have been relaxed by the new output regulation approach shown in Yang and Ding.10 There is no need to suppose that the disturbances are governed by certain neutral stable exosystems, which relaxes the restrictions on disturbances. The research results of Yang and Ding10 are compared with this study, and the significant comparisons are summarized as follows: (1) when the state variables of the system are unmeasurable, the research method using Yang and Ding10 cannot be solvable. On the contrary, the research method using this study is solvable via the state observer; (2) the remarkable property of existing output regulation approaches is that the nonlinearities are usually assumed to be sufficiently smooth with respect to their arguments.11 Yang and Ding10 exploits the fact that the nonlinear items in the system is not required to be sufficiently smooth. This study solves the problem without the difficult sufficient conditions including the nonlinearities which are not globally Lipschitz and disturbances which appears linearly but multiplied nonlinearities; (3) when the disturbances are unknown, the homogeneous growth condition of Yang and Ding10 become impractical because this condition contains disturbances. In contrast, the homogeneous growth condition is not necessary for this study. Generally, the nonlinear control approach needs to solve the difficult partial-differential Hamilton-Jacobi equation,12,13 and we can obtain the closed-form solution only for some special cases.14 The internal model principle approach generally transforms the tracking problem to the regulation problem. This approach needs to solve the complex partial-differential equation of the center manifold.7 However, the asymptotic solutions of this partial-differential equation have been exploited only for some special cases.15,16 The adaptive fuzzy control has been presented to solve nonlinear systems efficiently.17 The drawback of adaptive fuzzy control approach is that the complicated parameter updating criterion makes this approach be impractical.18 Feedback linearization approach is one of the most important nonlinear control design strategy developed during the last few decades.19,20. This approach may result in linearization which is valid for larger practical operating points of the system, as opposed to a local Jacobian linearization about an operating point, and it has been applied successfully to address many practical systems including the tracking control of nonholonomic mobile robot,21 the passivity-based surge control of compressors,22 three-phase grid-connected photovoltaic systems,23 the control of electromagnetic suspension system,24 and bank-to-turn missile system.25
The almost disturbance decoupling subject, designing a controller to reduce the influence of the disturbance on the output end, is started up for linear and nonlinear systems by Willems26 and Marino et al.,27 respectively, and then many important related studies have been created.28–30 Marino et al.27 investigates the single-input single-output (SISO) almost disturbance decoupling problem based on the state feedback approach and the singular perturbation approach. The almost disturbance decoupling problem is solved under some complicated sufficient conditions including the nonlinearities which are not globally Lipschitz and disturbances which appears linearly but multiplied nonlinearities. The complicated sufficient conditions need the condition that the nonlinearities multiplying the disturbances satisfy the structural triangular conditions. Marino et al.27 exploits the fact that the following SISO almost disturbance decoupling problem of some examples cannot be solved: , , , where are the input and output, respectively, and are the disturbance terms. In contrast, this example can be easily solved without those difficult conditions via the proposed approach in this study. The proposed controller has a feedback linearization controller and a state observer. The input-to-state stability of the feedback-controlled system is then proved by the composite Lyapunov theory such that the globally asymptotical tracking is guaranteed with the almost disturbance decoupling performance. Most notably, the generality of this approach and implications, due to the fact that unlike Jacobian linearization feedback linearization is not only locally valid, are also shown. In order to exploit the practical applicability, this study also has successfully achieved the tracking controller with almost disturbance decoupling performance for a double rotor multi-input multi-output (MIMO) system:
Observer-based feedback linearization control: in this study, we designed an observer-based feedback linearization controller for the following MIMO nonlinear control system with disturbances
that is
where , , and are the state vector, input vector, and the output vector, respectively; is a bounded disturbances term, and are smooth functions, and is a constant vector. The nominal system of the system equation (3) is assumed to have the vector relative degree such that the properties hold:31
1. For all , ,
where the function L is the Lie derivative operator31 and .
2. The following square matrix owns the nonsingular property
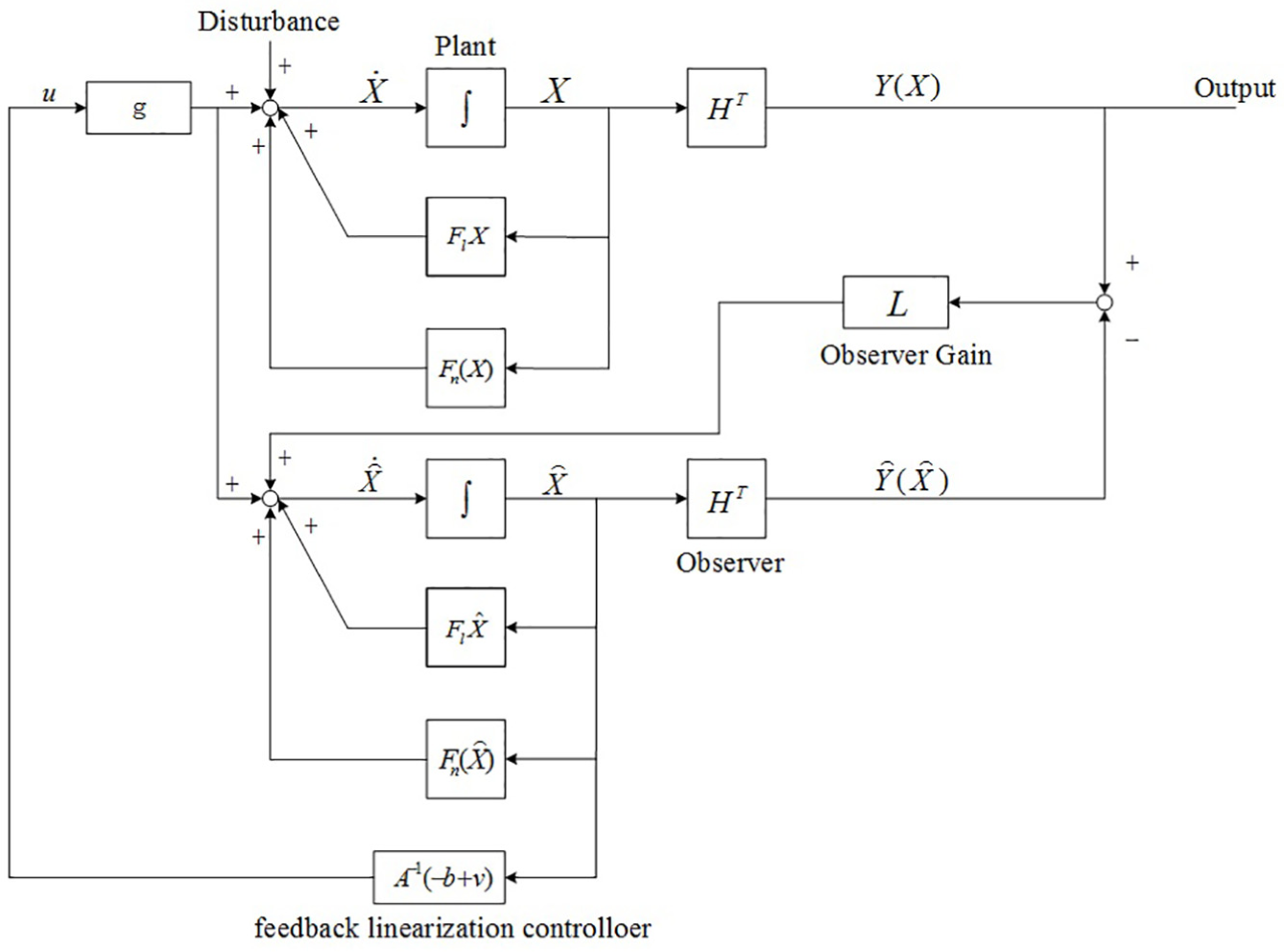
The desired output trajectory and its first r derivatives are all uniformly bounded and where is some positive constant. The block diagram of complete observer-based feedback linearization control is demonstrated in the Figure 1.
The block diagram of complete observer-based feedback linearization control.
The original nonlinear control system can be separated with linear part and nonlinear part as follows
where and are the linear part and nonlinear part of function , respectively. Similarly, the desired observer can be separated with linear part and nonlinear part
where L is the observer gain. Subtracting equation (10) from equation (8) and performing the derivative operation yield
where is the estimated error. It is well known that if possesses observable property, the matrix will be Hurwitze such that the following equation hold
where is a positive definite matrix. Assume that there is a constant such that the Jacobian inequalities hold
and
that is, possesses the Lipschitz property.32 Isidori31 has exploited the fact that if the distribution
possesses the involutive property and the vector fields
are complete functions, where
then the function
is a diffeomorphism. For the sake of convenience and simplicity, let us give some definitions as follows
where are some adjustable variables such that possesses Hurwitz property. Let be the positive definite matrix solution of the following Lyapunov equations
Definition 1
Given the system , where possesses piecewise continuous in t and locally Lipschitz properties in x and . This system is defined to be input-to-state stable if there exists a class-K function , a class-KL function , and positive numbers and such that under any initial condition with and any bounded input with , the following inequality holds32
Definition 2
The almost disturbance decoupling property is defined to be globally solvable by the desired controller for the transformed-equivalent system by a global diffeomorphism, if the controller makes the following properties hold:
The transformed-equivalent system is input-to-state stable with respect to given disturbances.
For any given initial condition ,
and
where , are some positive numbers; , are class-K functions; and is a class-KL function.33
Theorem 1
The almost disturbance decoupling problem is globally solvable by the controller defined as
if exists a positive number and a continuously differentiable function such that the following inequalities hold for all
where , , and . Moreover, the tracking error of the transformed-equivalent system can be attenuated by increasing the numbers
and be exponentially attracted into a sphere , , with an exponential rate of convergence
to be a composite Lyapunov function of the subsystems equations (81) and (82),34,35 where and are
and
In view of equations (28) and (52), the derivative function of the composite Lyapunov function along the trajectories of equations (12), (81), and (82) is given by
From Khalil32 (Theorem 5.2), equation (95) then implies the almost disturbance decoupling input-to-state stable property for the closed-loop system. Furthermore, it is easy to derive that
So that the almost disturbance decoupling property equation (46) is proved and then the almost disturbance decoupling problem is globally solved. Finally, we will show that the sphere is a global attractor for the output tracking error system. From equations (95) and (60), we obtain
For , we get . Then any sphere described by
is a global final attractor for the tracking error system. Furthermore, it is easy to show that, for , we have
that is
Utilizing the comparison theorem Miller and Michel36 gets
Therefore,
Then we obtain
and we can conclude that the convergence rate toward the sphere is equal to .
Illustrative example
A double rotor MIMO system is investigated in this section to demonstrate the practical value of main proposed theorem. The double rotor MIMO system mechanical structure, shown in Figure 2, is a laboratory equipment for some flying viewpoints. The double rotor MIMO system, consisting of two electrical rotors that are orthogonal to each other, is a complicated cross-coupling nonlinear system and is fixed by a beam pivoted on a basic element such that the unit can rotate in pitch direction and yaw direction. The master and tail rotors are separately installed at both ends of the beam where the master motor drives vertically the beam to turn up or down at a pitch angle and the tail motor drives horizontally the beam to turn left or right at a yaw angle. The incremental encoders, placed at the base and pivot, are used to measure the pitch angle and yaw angle and then the tachogenerators are connected to get the angular velocities of the two driven DC motors. Weighting counterbalance device is installed to the beam for setting the equilibrium point of the double rotor MIMO system. The desired control inputs are the supplied voltage of driving both DC motors and then the rotation motor speed and the beam position are changed by adjusting the inputs.
The double rotor multi-input multi-output (MIMO) system.
According to Su and Wang,37 the dynamic equations of the double rotor MIMO system can be described as follows
where and are, respectively, the pitch and yaw angles, and are the angular frequencies of the master DC motor and the tail DC motor, respectively, and are the time constants of the master DC motor and the tail DC motor, respectively, and are the moments of inertia in the master DC motor and the tail DC motor, respectively, and are the angular momentums in the horizontal and vertical plane, respectively, for the beam, are related physical parameters of system, and are nonlinear functions of and ; and and are the vertical and horizontal supplied voltage of DC motors, respectively. Define the input and state variables to be , , , , , , , and . Substituting the physical values into dynamic equations yields the following equations
where is assumed to be the disturbance and denotes the unit step function. Now we will demonstrate how to build a controller that tracks the desired signals based on the main proposed theorem in this study. Choose , , , and . From equation (48), we obtain the desired controllers as follows
Where
It is easy to prove that the related conditions of Theorem 1 are satisfied if we choose , , , , , , , , , , , , ,
and
As discussed in the previous section, the tracking controllers will steer the output tracking errors of the closed-loop system to be exponentially attenuated to the neighborhood of zero by virtue of Theorem 1. The tracking errors of the output variables and without the designed controller are depicted in Figures 3 and 4, respectively. It is obvious to see that the tracking performances are not achieved under the case of no controller. Then, adding the designed controller to the system gets the desired tracking performances of the output variables and as shown in Figures 5 and 6, respectively. The designed controllers u1 and u2 are shown in Figures 7 and 8, respectively. As seen in Figures 9 and 10, the estimated errors and of observer states converge to zero and then the observer performances are achieved.
The tracking errors of the output variable without the designed controller.
The tracking errors of the output variable without the designed controller.
The tracking errors of the output variable with the designed controller.
The tracking errors of the output variable with the designed controller.
The designed controller u1.
The designed controller u2.
The estimated errors .
The estimated errors .
Conclusion
We propose an observer-based feedback control to solve globally the tracking problem with almost disturbance decoupling property for MIMO nonlinear systems in this study. The investigation and practical application of feedback linearization approach for MIMO nonlinear control systems by parameterized diffeomorphism have been presented. Moreover, a practical example of the double rotor MIMO system demonstrates the applicability of the proposed observer-based feedback linearization approach and the composite Lyapunov approach. The generality of this approach and implications, due to the fact that unlike Jacobian linearization feedback linearization is not only locally valid, are also shown. Simulation results exploit the fact that the proposed methodology is successfully applied to the desired tracking and almost disturbance decoupling problem.
Footnotes
Handling Editor: Yunn-Lin Hwang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Institute-level major scientific research and training projects (Lead Doctor special projects) for City College of Dongguan University of Technology, Grant No.: 2017YZDYB01Z (Grant Title: Create a new theory and technology of electric circuit and electronics science based on Chen’s Electrical Unifying Approach).
ORCID iD
Chung-Cheng Chen
References
1.
ZhangS.Sliding mode control for an inhomogeneous heat equation with global constraint. Asian J Control2017; 19(6): 2116–2126.
2.
KardošJ.Robust robot control driven by a variable structure state observer. In: 2018 19th international Carpathian control conference (ICCC), Szilvasvarad, 28-31 May 2018, pp.410–415. New York, NY: IEEE.
3.
HwangCLHungJY.Adaptive recurrent neural network enhanced variable structure control for nonlinear discrete MIMO systems. Asian J Control2018; 20(6): 2101–2115.
4.
SwaroopDHedrickJKYipPPet al. Dynamic surface control for a class of nonlinear systems. IEEE T Automat Contr2000; 45(10): 1893–1899.
5.
LiYZhouSZhuH. A backstepping controller design for underactuated crane system. In: 2018 Chinese control and decision conference (CCDC), Shenyang, China, 9–11 June 2018, pp.2895–2899. New York, NY: IEEE.
6.
YangJZhengWX.Offset-free nonlinear MPC for mismatched disturbance attenuation with application to a static var compensator. IEEE T Circuits-II2014; 61(1): 49–53.
7.
IsidoriAByrnesCI.Output regulation of nonlinear systems. IEEE T Automat Contr1990; 35: 131–140.
8.
LiuTHuangJ.Cooperative output regulation for a class of nonlinear multi-agent systems with unknown control directions subject to switching networks. IEEE T Automat Contr2018; 63(3): 783–790.
9.
PerozHOgunnaikeBDevasiaS.Output tracking between operating points for nonlinear processes: Van de Vusse example. IEEE T Contr Syst T2002; 10(4): 611–617.
10.
YangJDingZ.Global output regulation for a class of lower triangular nonlinear systems: a feedback domination approach. Automatica2017; 76: 65–69.
11.
ChenZHuangJ.Stabilization and regulation of nonlinear systems. London: Springer, 2014.
12.
Vander SchaftAJ. -gain analysis of nonlinear systems and nonlinear state feedback control. IEEE T Automat Contr1992; 37: 770–784.
13.
GaoZWuXLiuY. Input and output strictly passive H-infinity control of switched linear systems. In: 2018 Chinese control and decision conference (CCDC), Shenyang, China, 9–11 June 2018, pp.4705–4708. New York, NY: IEEE.
14.
IsidoriA. control via measurement feedback for affine nonlinear systems. INT J Robust Nonlin1994; 4: 553–574.
15.
GopalswamySHedrickJK.Tracking nonlinear non-minimum phase systems using sliding control. Int J Control1993; 57: 1141–1158.
16.
SuHTangGYMaH. Damping control for systems with sinusoidal disturbances based on internal model principle. In: 2018 IEEE 27th international symposium on industrial electronics (ISIE), Cairns, QLD, Australia, 13-15 June 2018, pp.206–211. New York, NY: IEEE.
17.
ChenBSLeeCHChangYC. tracking design of uncertain nonlinear SISO systems: adaptive fuzzy approach. IEEE T Fuzzy Syst1996; 4(1): 32–43.
18.
RigatosGSianoPAdemiSet al. An adaptive neurofuzzy H-infinity control method for bioreactors and biofuels production. In: IECON 2017 - 43rd annual conference of the IEEE industrial electronics society, Beijing, China, 29 October–1 November 2017, pp.8750–8755. New York, NY: IEEE.
19.
SlotineJJELiW. Applied nonlinear control. New York, NY: Prentice Hall, 1991.
20.
CallegaroLPaganoDJCiobotaruMet al. Feedback linearization control of non-inverting buck-boost PV power optimizers. In: 2017 IEEE 8th international symposium on power electronics for distributed generation systems (PEDG), Florianopolis, Brazil, 17–20 April 2017. New York, NY: IEEE.
21.
ZilongLChenfeiJJieLet al. Cascaded feedback linearization tracking control of nonholonomic mobile robot. In: Proceedings of the 32nd Chinese control conference, Xi’an, China, 26–28 July 2013, pp.4232–4237. New York, NY: IEEE.
22.
SariGAkhrifOSaydyL. Robust passivity-based surge control of compressors via feedback linearization. In: 2013 9th Asian control conference, Istanbul, Turkey, 23–26 June 2013, pp.1–5. New York, NY: IEEE.
23.
MahmudMAPotaHRHossainMJet al. Robust partial feedback linearizing stabilization scheme for three-phase grid-connected photovoltaic systems. IEEE T Photovolt2014; 4(1): 423–431.
24.
JooSJSeoJH.Design and analysis of the nonlinear feedback linearizing control for an electromagnetic suspension system. IEEE T Automat Contr1997; 5(1): 135–144.
25.
LeeSYLeeJIHaIJ. A new approach to nonlinear autopilot design for bank-to-turn missiles. In: Proceedings of the 36th conference on decision and control, San Diego, CA, 12 December 1997, pp.4192–4197. New York, NY: IEEE.
26.
WillemsJC.Almost invariant subspace: an approach to high gain feedback design–part I: almost controlled invariant subspaces. IEEE T Automat Contr1981; 26(1): 235–252.
27.
MarinoRRespondekWVan Der SchaftAJ.Almost disturbance decoupling for single-input single-output nonlinear systems. IEEE T Automat Contr1989; 34(9): 1013–1017.
28.
QianCLinW.Almost disturbance decoupling for a class of high-order nonlinear systems. IEEE T Automat Contr2000; 45(6): 1208–1214.
29.
CaiGBLvLLHeHFet al. Periodic Lyapunov equation based approach to semi-global almost disturbance decoupling of continuous-time periodic linear systems subject to input saturation. In: 2015 34th Chinese control conference (CCC), Hangzhou, China, 28–30 July 2015, pp.166–170. New York, NY: IEEE.
30.
ZhangCHWangZCaiBet al. Adaptive almost disturbance decoupling for a class of uncertain nonlinear systems. In: 2017 36th Chinese control conference (CCC), Dalian, China, 26–28 July 2017, pp.644–649. New York, NY: IEEE.
31.
IsidoriA.Nonlinear control system. New York, NY: Springer Verlag, 1989.
32.
KhalilHK.Nonlinear systems. Upper Saddle River, NJ: Prentice Hall, 1996.
33.
MarinoRTomeiP.Nonlinear output feedback tracking with almost disturbance decoupling. IEEE T Automat Contr1999; 44(1): 18–28.
34.
KhorasaniKKokotovicPV.A corrective feedback design for nonlinear systems with fast actuators. IEEE T Automat Contr1986; 31: 67–69.