
Abstract
An adaptive fuzzy-based fault tolerant control method is first proposed for the discrete-time switched nonlinear systems. In this article, the actuator fault is considered, which contains the loss of effectiveness fault and bias fault. Both the effectiveness factor and the bias signal are unknown but bounded. Moreover, there are unknown internal dynamics in the considered system. In order to solve this problem, the fuzzy logic systems are exploited to provide an approximate construction for the unknown dynamics. Then, under arbitrary switching signals, the designed controller and adaptive laws ensure the boundedness of signals appearing in the considered system, and the system states can track the reference signals. Finally, an example shows the efficiency of the developed approach.
Introduction
Faults, which can bring large damages, and may lead to personnel casualties, often exist in practical engineering. Thus, fault tolerant control (FTC) is a significant topic. Actuator faults as a class of common faults have been paid wide attention and achieved a lot of results.1–7 Two classes of actuator faults are always considered: the actuator loss of effectiveness (LOE)8,9 and the actuator bias fault. 10 When the parameters of the actuator fault are known, it is much easy to design the fault tolerant controller, and if the parameters of the actuator fault are unknown, it will bring great obstacle for the fault tolerant controller design. In Benosman and Lum, 11 the actuator LOE fault was considered, and a passive fault tolerant controller was proposed. Literature 12 concentrated on the actuator fault tolerant problem for the discrete-time networked control systems.
In addition, a lot of practice plants cannot be simply considered as single-model systems. In other words, multiple-model systems (like switched systems) are usually used to describe the characters of real systems, such as gene regulatory networks and switching power converters. During the past decades, the study of switched systems has been attracted the attention of many researchers.13–18 Switched systems can be regarded as a class of special hybrid systems. In general, it possesses several subsystems and a designed switching rule. In recent years, the FTC approach for switched systems has achieved a few results.19–23 However, these results are all for continuous-time switched systems. Besides, most of them are obtained for switched linear systems. As far as we know, there do not exist the results of FTC for discrete-time switched systems, let alone for the discrete-time switched nonlinear systems. This inspires us to study this article.
In continuous-time switched systems, the switching may take place at any time instants. However, in discrete-time switched systems, there is a restriction on the switching instants. That is, the switching must occur at a certain sampling point. Moreover, less analysis schemes can be employed to solve the FTC problem for discrete-time switched nonlinear systems. It will bring a large amount of obstacle for designing controllers.
Moreover, there often exist uncertainties in the control systems.24–38 The existence of unknown functions is the most common. Usually, there are three methods to handle the unknown functions: fuzzy logic systems (FLSs),26,27 generalized fuzzy hyperbolic models (GFHMs), and neural networks (NNs). That is to say, many great results of fuzzy-based (or NN based) control28–33 have been proposed. In He et al., 35 an adaptive NN controller was set up for a class of robotic manipulator systems with unknown dead-zone input and predefined output constraint. In Cheng et al., 38 a model predictive control method was presented for the tracking problem of piezoelectric actuators, and a nonlinear autoregressive-moving-average with exogenous inputs model of piezoelectric actuators was implemented by NNs.
Motivated by the above analysis, this work studies the adaptive FTC design problem for a class of discrete-time nonlinear switched systems suffered from the actuator fault, in which both the LOE fault and bias fault are considered. The parameters of the fault are all unknown but bounded, and then, the adaptive scheme is used to deal with the unknown parameter problem. Furthermore, the unknown internal dynamics are taken into consideration. Here, the FLSs are utilized to approximate the unknown functions. The designed controller and adaptive laws guarantee that the states of the system can track the given signals as much as possible and all the signals appearing in the design are bounded under arbitrary switching signals. To explain the effectiveness of the developed method in this work, an example is used.
The main contributions of this article compared with the existing results on switched and nonswitched nonlinear systems are in two aspects: (1) compared with the results in previous works,26,36,37 in which the continuous-time switched systems were considered, in this article, the discrete-time system is studied. (2) In addition, the FTC problem of discrete-time switched nonlinear system is examined. To the best of our knowledge, there was hardly any result of FTC for discrete-time switched systems, let alone for the discrete-time switched nonlinear systems.
Problem formulations and preliminaries
We consider the following discrete-time nonlinear switched system in the form of

where
The considered actuator fault is expressed as 39

where
Remark 1. In this work, the actuator fault is considered. The actuator LOE fault and the actuator bias fault are the two kinds of faults which are studied most. The actuator LOE fault is of the form
Thus, the switched system (1) with actuator fault is further described as
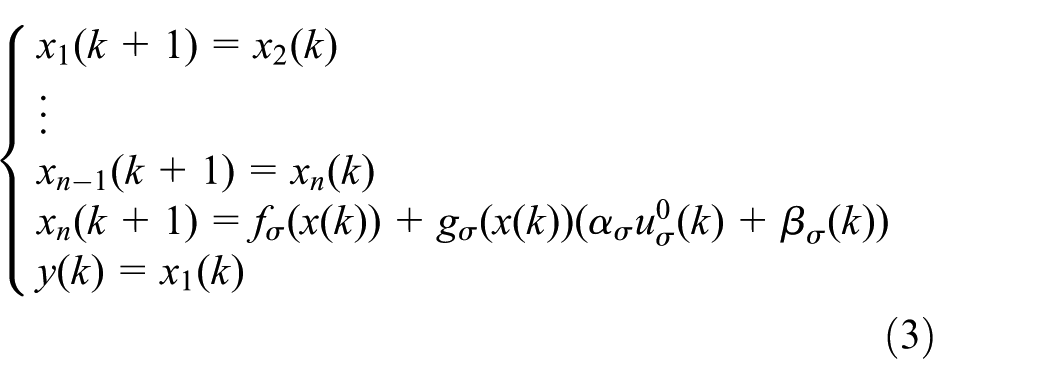
The control goal is to structure subsystem controllers so that under arbitrary switching signals, the system state
Preparing for the stability analysis, the following assumptions are required.
Assumption 1. In this article, the bias signal
Assumption 2. The desired signals
Assumption 3.The gain function
Description of FLSs
Since there exist unknown functions in the considered system (1), the FLSs are exploited to set up an approximate construction for the unknown functions. We all know that the knowledge base in an FLS contains a batch of IF-THEN rules. In fact, they are described as follows
Through singleton function, center average defuzzification, and product inference, a FLS can be described as 32

where
Choose the following fuzzy basis functions

Let

Thus, an unknown continuous function

where
with
Controller design
Define

Remark 2. It is worth noting that the system state tracking problem can be transformed to the output tracking problem in this article. According to Assumption 2, we know that
Choose the following desired controllers

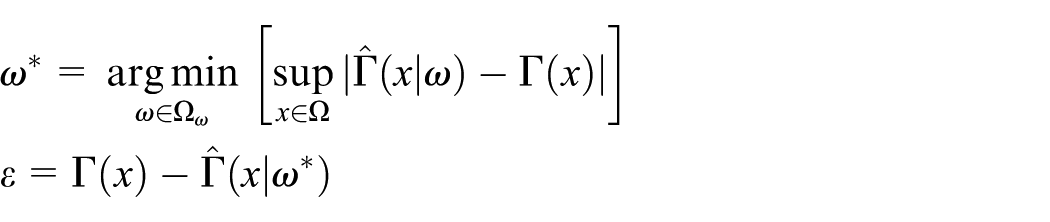
Since there exist unknown functions

Assumption 4. The approximation error
Then, subtracting and adding the term

Let
Design the following subsystem controller and adaptive laws


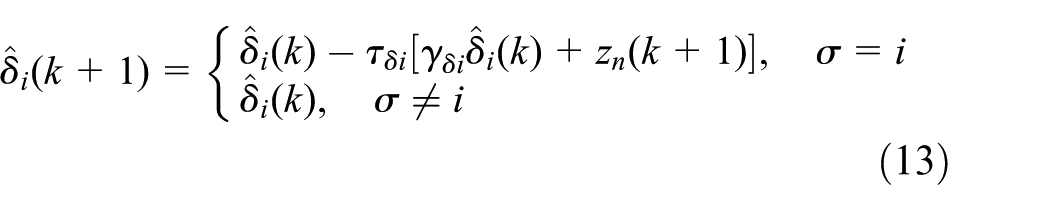
where
Substituting equation (11) into equation (10), we have

where
Main Result
The main result will be shown in this section. First, we give some definitions of notations, which will be used in the theorem proving




Moreover, the design parameters



Theorem 1. Consider the discrete-time switched nonlinear system (1) with actuator faults (2) satisfying Assumptions 1–4. Design the subsystem controller and adaptive laws as in equations (11), (12), and (13). If the conditions (19)–(21) are satisfied, all the variables in the resulting system are bounded, and the state
Proof: Choose the common Lyapunov function

where
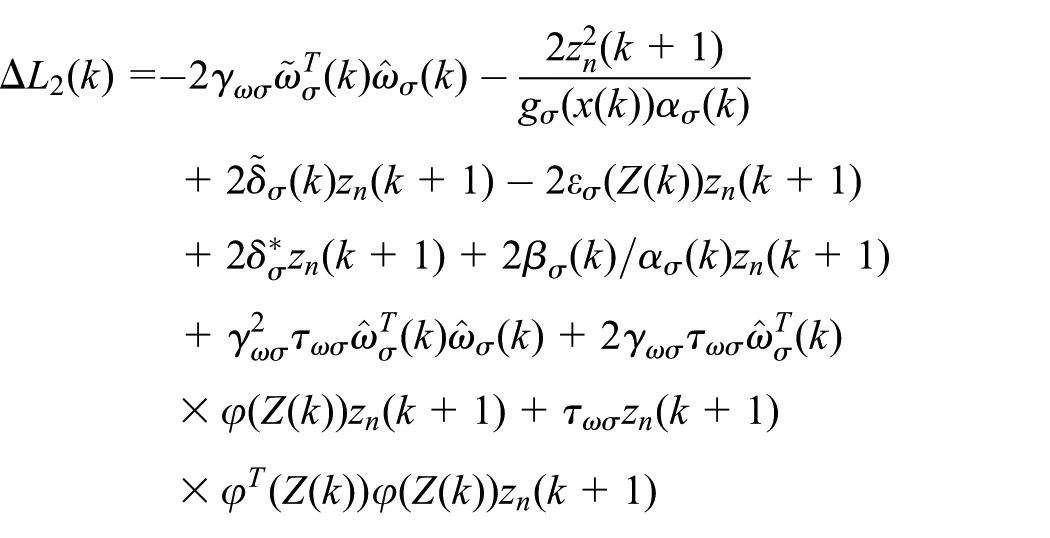
It is easy to obtain the first difference of

Subtracting

Then, we have

From equation (14), we have

Then,
Consider the following facts

then,

Similar to

Combining equations (23), (24), and (25), we can conclude that

where the definitions of
If conditions (19), (20), and (21) are satisfied, then

On the light of equation (26), we can know that if
The proof of Theorem 1 is completed.
Remark 3. In this article, a class of switched adaptive laws are designed. That is to say, different update laws are applied for active and inactive periods of each subsystem, which implies that the estimation value of one subsystem is updated in a way when it is active, and in another way, when it is inactive. It is not difficult to know that this kind of switched adaptive laws is more suitable for switched systems than the nonswitched one.
Remark 4. The parameters of the actuator fault in this paper are all unknown but bounded. In order to solve this problem, the adaptive method is used. Let
Remark 5. Compared with the existing results, the following aspects should be emphasized:
Unlike the methods in previous works4,7 and Kang et al., 10 in which the adaptive FTC problem for nonswitched systems were considered, this article concentrates on the case for switched system. Due to the complicity of the switched systems, it brings a great obstacle in the design of controller.
Although the FTC issue for switched systems were taken into account in previous works,19–23 they all focus on the continuous-time switched systems (especially for the continuous-time switched linear systems). The FTC problem for discrete-time switched nonlinear systems is studied in this article. For continuous switched systems, the switching may take place at any time instants. However, in discrete-time switched systems, the switching must occur at a certain sampling point. Furthermore, less analysis schemes can be employed to solve the FTC problem for discrete-time switched nonlinear systems. This makes it more difficult for designing controllers.
Simulation
In order to explain the effectiveness of the proposed method, we apply it to the following system

where
The switching signal is
Consider the following actuator fault


Select the given signals as

and

The FLSs are employed to approximate

The initial values of the system states and the adaptive laws are
Figures 1–4 show the simulation results. Figure 1 is the switching signal. Figure 2 displays the trajectories of
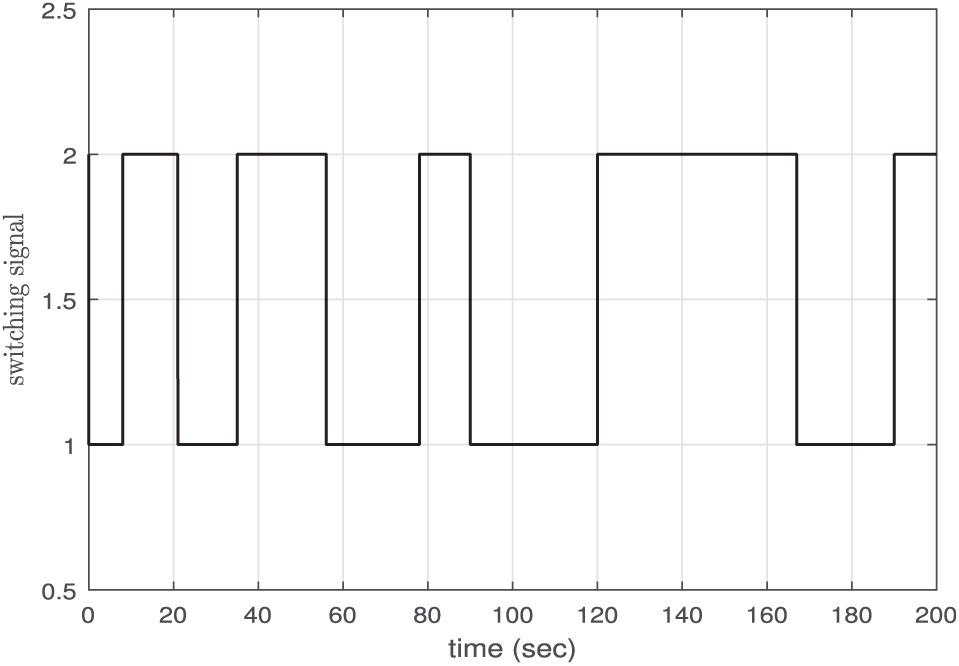
Switching signal

The trajectories of

The trajectories of

Control input u.
Conclusion
The actuator FTC problem for a class of discrete-time switched nonlinear systems with unknown functions is coped with in this article. The FLSs are utilized to approximate the unknown functions. Both the actuator LOE and bias faults are taken into account, and all the parameters of fault are unknown but bounded, which is solved by adaptive technique. Design the subsystem controllers and adaptive laws in order to ensure that all the signals are bounded under arbitrary switching signals, and the system states can track the reference signals. Finally, the simulation example well shows the effectiveness of the developed method. In the future, we will try our best to discuss the continuity of solution rather than assume that in a switched system.
Footnotes
Handling Editor: Hamid Reza Karimi
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.