
Abstract
Stabilization of underactuated mechanical systems is one of the fundamental benchmark problem in the field of control theory. In this article, a hierarchical sliding mode control based on state-dependent switching gain is proposed for stabilization of underactuated mechanical systems. This controller is based on the so called first-level and second-level sliding surfaces. The asymptotic stability of these surfaces is proved by the Lyapunov stability theory. The proposed control technique is applied to two nonlinear underactuated mechanical systems and its feasibility is verified by numerical simulation. The proposed controller efficiently tackles the bounded external disturbance and shows robust performance. The convergence rate of the proposed controller is much faster as compared with the conventional decoupled sliding mode control and the integral sliding mode control.
Introduction
The design of nonlinear controllers for mechanical systems has become an active field of research from the last few decades. 1 From a theoretical point of view, this attention can be attributed to their interesting dynamical behavior, which is well-suited for the validation and practical application of ideas emerging in control theory. However, recent technological advances have produced many real-world engineering applications that require the automatic control of mechanical systems. 2
An underactuated mechanical system is a system that has a fewer number of control input actuators than the degrees of freedom of the system. These systems are widely used in spacecrafts, underwater vehicles, mobile robots, surface vessels, and many other systems. Due to numerous practical applications of these systems, many researchers have worked to find reliable mechanisms for the control of underactuated mechanical systems. Stabilization of these systems is a fundamental benchmark problem. These systems cannot be stabilized by smooth feedback because their dynamics are governed by differential equations in the presence of some non-integrable differential conditions.1,3–5 The development of new control techniques and numerical tools have played a significant role in recognition and explaining the concept of stabilization. However, it is still an open and challenging task for researchers.
Many techniques have been proposed to solve the stabilization problem for underactuated mechanical systems.6–13 Most of the suggested control approaches undergo from either the oscillatory behavior, slow convergence rate, or lack of robustness against the external disturbances. The problem of robustness and slow convergence can be solved using sliding mode control (SMC). Due to inherent robustness properties of SMC, it has been widely used for stabilization of nonlinear systems. It has been used to design a controller for robotics,14–16 under-actuated cranes,17–20 unmanned aerial vehicle (UAV) quadrotors, 21 and under-actuated vessels. 22 SMC technique, which is a powerful approach to handle internal and external disturbances, was introduced in the literature.23–25 The results developed by these techniques were very interesting. The control designed by these techniques had the ability to handle a class of uncertainties. However, these techniques require the use of virtual disturbances to satisfy some conditions. These controllers also require a lot of calculations that increase the computational burden.
Recently, many researchers have been showing their interest in combination of fuzzy logic control (FLC) and SMC which is referred to fuzzy SMC.26–28 Fuzzy SMC has advantages of both FLC and SMC. However, there are some drawbacks of this technique. For higher order systems, the number of fuzzy sets and fuzzy rules becomes incredibly large, which compromises the applicability of this technique. An often remarked drawback of methods based on fuzzy logic is the lack of appropriate tools for analyzing the controller performance, such as stability, optimality, and so on. The SMC technique consists of two distinct phases. One is reaching phase and the other is sliding phase. In the reaching phase, the system states are forced toward the sliding surface while in the sliding phase, the system trajectories drive along the sliding surface.
A known limitation of SMC technique is chattering. To overcome this problem, Slotine proposed adopting thin boundary layer neighboring switching surfaces, by replacing the sign function with a saturation function. 29 The chattering phenomenon can be removed completely by utilizing observer. The main idea of using observers to prevent chattering is to generate an ideal sliding mode in the auxiliary loop including the observer. 30 Another way to reduce chattering without designing any asymptotic observer is to use state-dependent switching gain. 31 With the choice of state-dependent switching gain and saturation function, the chattering effect becomes negligible. The main goal of this article is to design nonlinear SMC for a class of mechanical systems based on state-dependent switching gain which is robust for bounded external disturbances, chattering free, and have low complexity and computational burden.
Using switching gain which are functions of the system states, the SMC guarantees the robustness and faster convergence. We design the proposed controller for stabilization of inverted pendulum (IP) and ball-beam systems, and simulate it using MATLAB. The simulation results show effectiveness of our proposed controller.
Problem statement
The general form of a class of underactuated mechanical systems is given by

where

where
Control design
SMC due to simplicity of design has been successfully employed for solving nonlinear control problems.33–36 It was first used in 1960s and its basic formulations are due to the work of Utkin. 37 Utkin provided the definition of sliding surface from which equivalent control is derived. In 1978, Utkin and Yang continued their work and derived the term nonlinear switching from linear state space derivation which ensures the robustness of SMC. 38 SMC is based on the concept of the sliding surface, and it switches the system trajectories on this sliding surface. The total control input is a combination of switching control and equivalent control, that is

where
In this article, we are focusing on a class of nonlinear underactuated mechanical systems. SMC is a powerful and robust nonlinear feedback control method. However, for underactuated systems, designing a conventional single layer sliding surface is not appropriate because the parameters of the sliding mode surface can not be obtained directly according to the Hurwitz condition. The physical structure of the considered class also matters as it can be divided into several subsystems. Based on this structure, a simple way to design the sliding mode surface for this class was needed. To overcome this problem, Qian et al. 39 proposed a hierarchical sliding mode control (HSMC) for such a class of underactuated systems.
HSMC is a systematic and effective design procedure, which has both theoretical and practical significance. It fills the gap between SMC and its applications to underactuated mechanical systems. 40 It is composed of two types of sliding surfaces: the first-level sliding surfaces and a second-level sliding surface. The number of first-level sliding surfaces depends upon the number of subsystems and the second-level sliding surface is a linear combination of all first-level sliding surfaces. The schematic structure of the surfaces of HSMC is illustrated in Figure 1.

Schematic structure of sliding surfaces for HSMC.
In order to reduce the response time of convergence and decrease chattering phenomenon, we proposed to design state-dependent switching gain instead of a constant switching gain. Both, first-level and second-level sliding surfaces, are asymptotically stable in the proposed control design scheme. Numerical simulations validate the effectiveness of the proposed HSMC. To design this controller, we start by defining the first-level sliding surfaces as follows

where


The equivalent control of the

Now, we define the second-level sliding surface as follows

where

In order to derive a control law which drives the trajectories of the system to the sliding surface






We design

where “sat” is the saturation function and

and

The switching gain can be selected in two ways: one is the switching gain with a constant value

where

Theoretical stability
This section consists of two theorems which deal with the asymptotic stability of the second-level sliding surface and the first-level sliding surfaces. To prove these theorems, we use the Lyapunov stability theory and the Barbalat lemma. 29
Theorem 1 (Asymptotic stability of second-level sliding surface)
Consider the class of underactuated systems given in system (2). If we use the control law given in equation (3) along with sliding surfaces designed in equations (4) and (8), then the second-level sliding surface is asymptotically stable.
Proof
Consider the Lyapunov function defined in equation (10)

Differentiating both sides with respect to


Integrating both sides from

According to the Barbalat lemma 29

Therefore,
Theorem 2 (Asymptotic stability of first-level sliding surfaces)
Consider the underactuated system given in system (2). If the control law is adopted as given in equation (3) with sliding surfaces designed in equations (4) and (8), then the first-level sliding surfaces are asymptotically stable.
Proof
The proof of this theorem is quite simple. From equation (15) and considering that

where

Simulation results and discussion
The proposed controller is simulated in MATLAB and results are compared with the decoupled sliding mode controller (DSMC) and the integral sliding mode controller (ISMC). Consider a linear time-invariant (LTI) system of the form

where

where

where

where
Application to IP
IP system is a strongly nonlinear underactuated mechanical system which is dynamically suitable to test new control strategies. The structure of IP system is shown in Figure 2. In case of IP model, system (1) can be represented as

Structure of the inverted pendulum system.
The nonlinear functions

where



Description of variables and parameters used in inverted pendulum model.

The control input is given by

where



and

The angle of pendulum with time when system starts from
The position of cart with time when system starts from
Application to ball-beam system
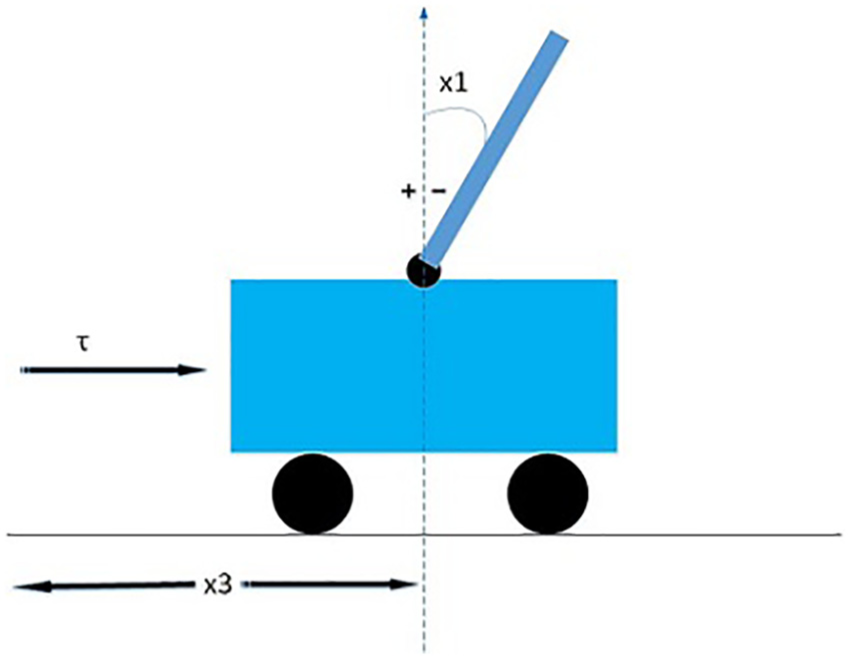
Ball-beam (BB) system is another nonlinear underactuated system. Its structure is illustrated in Figure 5 and mathematical equations are given as


Structure of the ball-beam system.
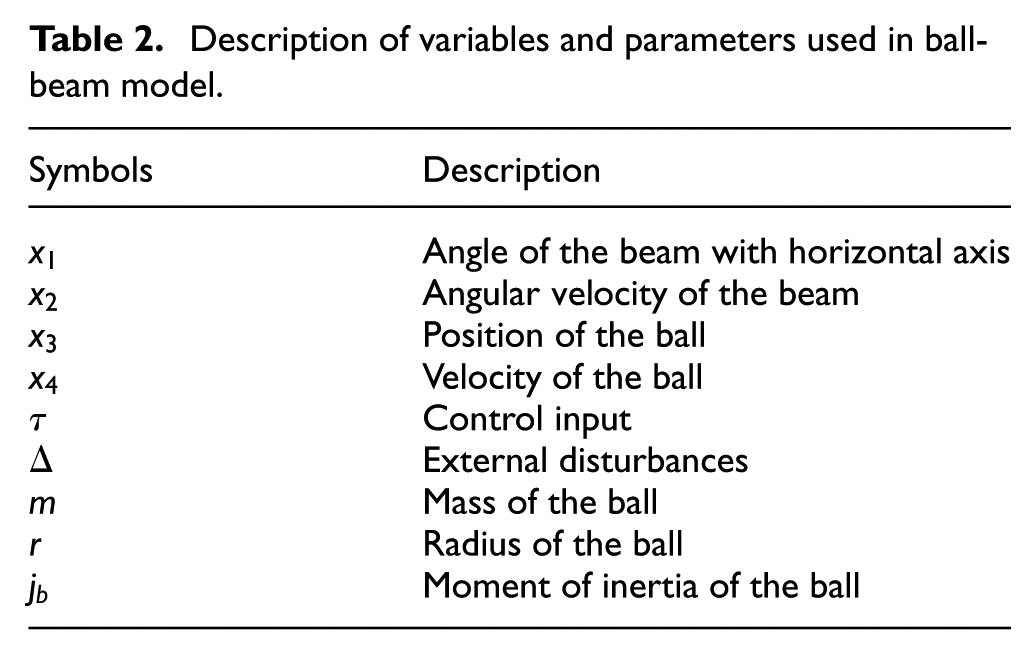
The description of different variables and parameters of ball-beam model is given in Table 2. The sliding surfaces are given by



Description of variables and parameters used in ball-beam model.
The control input is defined as

where


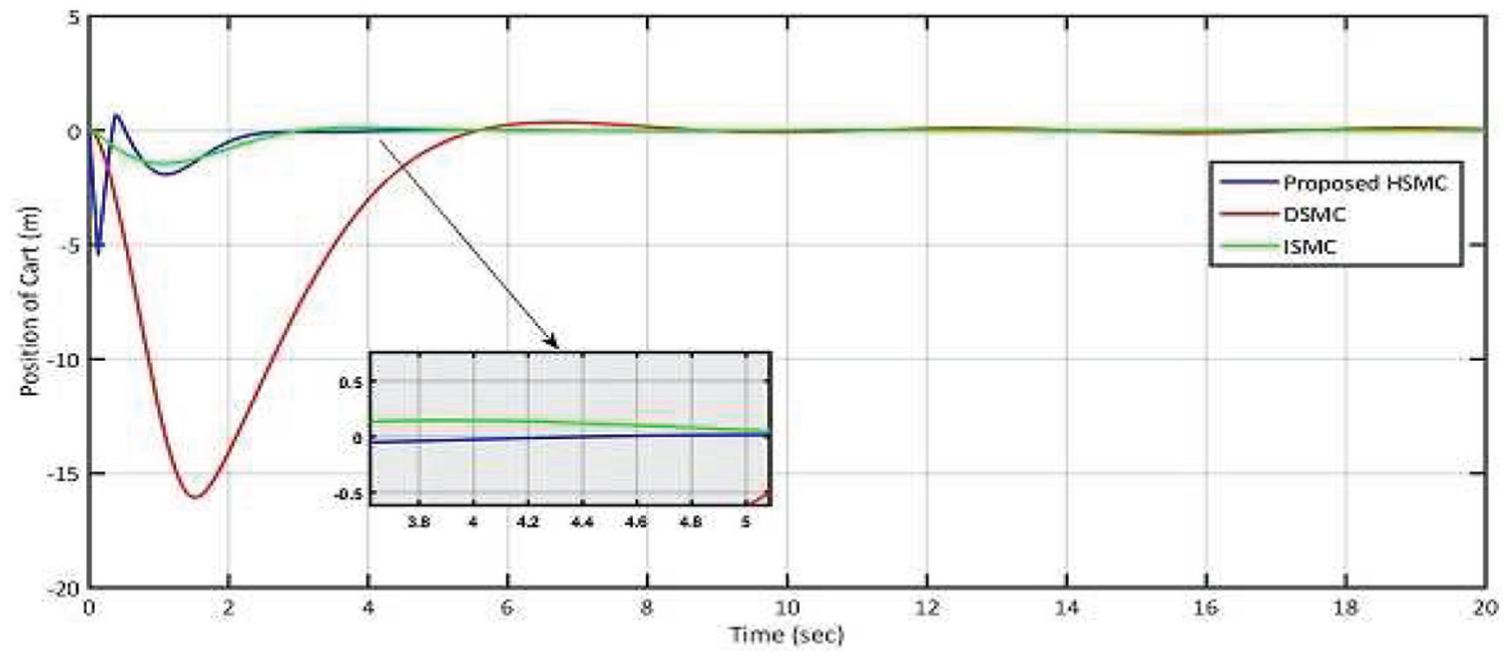
The values of parameters used in ball-beam model are given in Table 3. We use the same external disturbance as described in the inverted pendulum model. The change in the dynamics of angle of beam and position of the ball are shown in Figures 6 and 7. The simulation results show that the proposed controller has a faster convergence as compared with DSMC and ISMC in presence of bounded external disturbances.
The values of parameters and constants used in the simulations of model.


The angle of beam with time when system starts from

The position of ball with time when system starts from
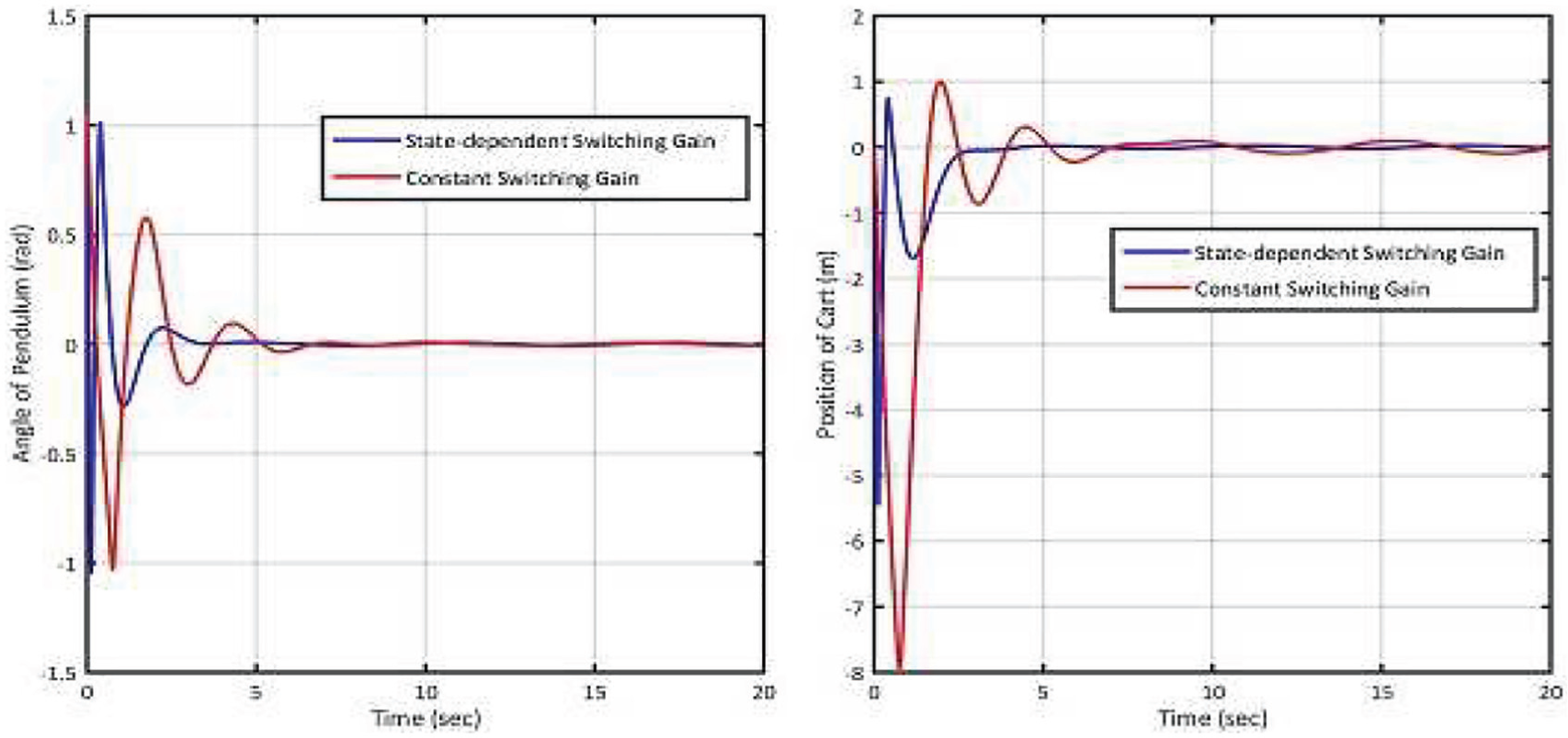
We also compare HSMC with the state-dependent switching gain to HSMC with a constant switching gain. It can be seen that response time of the proposed HSMC is much smaller as compared with the conventional constant gain HSMC. Simulation results are shown in Figures 8 and 9. These results demonstrate the significance of proposed HSMC over existing HSMC, DSMC, and ISMC techniques. We also fluctuate the external disturbance to validate the robustness of proposed HSMC.
Comparison of proposed HSMC with existing HSMC in case of IP system.

Comparison of proposed HSMC with existing HSMC in case of BB system.
Conclusion
In this article, we discussed the general form of a class of underactuated mechanical systems and presented a nonlinear control strategy for stabilization of these systems. We focused on the potential uses of SMC methods for stabilization of underactuated mechanical systems. We proposed HSMC based on state-dependent switching gain. The proposed controller consists of two first-level sliding surfaces and one second-level sliding surface which is essential to reduce chattering phenomenon.
The designed control technique is implemented on two nonlinear underactuated systems and simulated in MATLAB. The simulation results demonstrate that the proposed control technique is much efficient as compared with the existing SMC techniques such as HSMC, DSMC, and ISMC. The proposed control technique is robust and has a faster convergence as compared with these techniques. Furthermore, asymptotic stability of first-level and second-level sliding surfaces, used in the proposed technique, is also proved by the Lyapunov stability theory.
Footnotes
Acknowledgements
The authors are thankful to the editor and reviewers for their precious comments, which have led to the improvement in the clarity and quality of this article.
Handling Editor: Yueying Wang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.