
Abstract
This article presents a study of the backward bending mode of a simply supported rotating Rayleigh beam with internal damping. The study analyses the natural frequency behaviour of the backward mode according to the internal viscous damping ratio, the slenderness of the beam and its spin speed. To date, the behaviour of the natural frequency of the backward mode is known to be a monotonically decreasing function with spin speed due to gyroscopic effects. In this article, however, it is shown that this behaviour of the natural frequency may not hold for certain damping and slenderness conditions, and reaches a minimum value (concave function) from which it begins to increase. Accordingly, the analytical expression of the spin speed for which the natural frequency of the backward mode attains the minimum value has been obtained. In addition, the internal damping ratio and slenderness intervals associated with such behaviour have been also provided.
Keywords
Introduction
There have been numerous publications in the field of rotor dynamics over the past 50 years. Although some of these works have focused on modelling the dynamic behaviour,1–6 most of them have paid attention to natural frequencies, mode shapes, critical speeds, thresholds of instability and unbalanced response.7–24 The stability studies have been related to the potentially unstable forward bending mode while the analysis of the stable backward mode has been overlooked. However, in the field of railway dynamics, recent works have shown that the dynamics associated with certain backward bending modes of a wheelset are important in order to describe various relevant phenomena. Vila et al. 25 showed that a wavelength-fixing mechanism of rail corrugation is due to the excitation of some backward bending modes, where the roughness growth is predicted on the low rail for specific vehicle circulation conditions in curve. In addition, regarding the squeal noise phenomenon, Glocker et al. 26 concluded that the excitation of certain wheel mode shapes is responsible for the squeal noise generation mechanism (also wheel modal coupling). Thus, to gain a further insight into the physics of the problem, the backward bending mode is studied in the current work.
The literature related to the stability of rotating shafts differs according to the basic model adopted in the formulation (Jeffcott, Euler, Rayleigh or Timoshenko), the effects and properties considered (rotational inertia, gyroscopic effects, shear deformation and the type of internal and external damping) and the boundary conditions. It is well known that the classical Euler beam is not suitable for studying the dynamic behaviour of rotating beams. The rotational inertia and gyroscopic effects, included, for example, in the Rayleigh beam model, must be taken into account as shown by Sheu and Yang 7 and Sheu 8 in their studies of the stability of undamped rotating beams under various boundary conditions. For even greater precision, the couplings caused by shear deformation (as shown for the Timoshenko model)9,10 can also be considered.
A study of internally damped rotating shafts was first made by Kimball. 11 This study revealed the destabilizing effect of internal friction due to bending in the supercritical range, although the type of damping used was not specified. This phenomenon was demonstrated later by Dimentberg 12 for viscous internal damping, as well as in works listed in Genin and Maybee, 13 and Zorzi and Nelson. 14 Internal damping, also known as rotary damping, has been modelled as viscous and hysteretic damping. Its influence on the stability of the rotating system for both models has been analysed and compared in detail in different works. These comparisons have used Timoshenko models through an analytical approach 15 for several boundary conditions, as well as numerical simulations using finite elements.14,16 These studies mainly conclude that internal viscous damping has a destabilizing effect once the synchronous speed is reached, unlike hysteretic damping which has a destabilizing effect at any speed. However, later Genta, 17 using Jeffcott and Timoshenko models, and Montagnier and Hochard, 18 applying a Rayleigh model, conclude that hysteretic damping only destabilizes once synchronous speed is reached, in the same way as viscous damping. Other studies regarding the influence of internal viscous damping on the stability of rotors are given in Dimentberg 19 and Vatta F and Vigliani 20 for a Jeffcott rotor, the former study considering a random variation of damping and the latter discussing a non-linear damping model. Rosales and Filipich 21 and Mazzei and Scott 22 take into account the gyroscopic effects of rotational inertia in the Rayleigh model and agree on the fact that the destabilizing effect arises once critical speed is reached.
The presence of external damping, also known as non-rotary damping, differs from internal damping as it has a stabilizing effect at any speed, as demonstrated in studies by Ehrich, 23 and subsequently by Vance and Lee 24 and Zorzi and Nelson, 14 and more recently in the research works16,18,22 for Rayleigh and Timoshenko beam models. All these studies have concluded that the introduction of external damping using rolling bearings and hydrodynamic bearings results in a stable range within supercritical motion, and so improves system stability.
Most of the publications on the study of rotor stability cited previously concluded that the backward bending mode is stable for all speeds, slenderness and internal damping,3,14,16,18,19,27 and that only the forward bending mode is able to cause instability.3,14,16–19 In the Campbell diagram of the backward mode shown in the research works,3,9,10,16,18,21,22,28–34 it can be seen that natural frequencies monotonically decrease with spin speed due to gyroscopic effects. However, this behaviour cannot be held for certain damping and slenderness conditions, since a minimum value can be reached as it will be evidenced in this article. Specifically, in the absence of internal damping, the natural frequency of the backward mode decreases monotonically with spin speed. Many articles3,9,10,21,22,28–34 demonstrate that this is the expected behaviour, and it will be proved analytically later. However, in the presence of internal viscous damping, the behaviour may change, that is, the natural frequency can behave as if the system was undamped (decreasing function) as shown in the studies,3,16,18,21 or it can have a minimum threshold from which it begins to increase. Such behaviour of increasing natural frequency has hardly been addressed in the literature. Genta 3 and Lee 35 showed a slightly increasing trend considering a Jeffcott model, as well as Ku 16 and Montagnier and Hochard, 18 who adopted a rotating Rayleigh beam model. Further research on the reasons for this change in the Campbell diagram (spin speed, internal damping, slenderness) is carried out in the context of the current work.
Thus, for a simply supported rotating Rayleigh beam with internal damping, this article presents an analytical study of the behaviour of the natural frequency of the backward bending mode with respect to the spin speed (Campbell diagram), the internal viscous damping ratio and the slenderness of the beam. Rotational inertia and gyroscopic effects are taken into account in order to analytically formulate the sign change suffered by the slope of the natural frequency curve (minimum value). The analytical expression of the spin speed associated with this minimum value has been obtained, as well as the internal damping ratio and slenderness intervals where it occurs. Once this spin speed is formulated, a comparison is made with the critical speed of the forward mode to demonstrate the validity of the current work.
One-dimensional model of the Rayleigh beam
In this section, the formulation associated with the one-dimensional simply supported Rayleigh beam model, including rotation and internal modal viscous damping, is summarized. Further details can be found in Genta. 3
The kth mass normalized bending mode calculated in the neutral axis of the Rayleigh beam is

where the constant

The transverse displacements are computed from the fixed frame through the following modal approach

where

where

The modal gyroscopic term

where

The equation of motion (4) can be written as

where the eigenvalues of the previous equation are

The notation
Study of the behaviour of the backward bending mode of a damped simply supported rotating Rayleigh beam
Once the equation of motion for a damped simply supported rotating Rayleigh beam has been shown, the next step is to analyse the dynamic behaviour of the backward bending mode in terms of the slenderness of the beam, internal viscous damping ratio and the spin speed. The ultimate aim is to describe analytically the change in sign suffered by the slope of its natural frequency. In this study, only the backward mode eigenvalues are considered.
Stability analysis
The eigenvalues of the forward and backward bending modes are computed in equation (9). As a criterion for studying the stability of the system, one can choose to analyse the logarithmic decrement in the system response (an approach taken by Zorzi and Nelson, 14 Ku 16 and Montagnier and Hochard 18 ) or the real part of the eigenvalues (Routh’s criterion). The latter option has been adopted here: the condition for the stability of the system being that all the eigenvalues have strictly negative real part. This criterion was used by Melanson and Zu 15 and Mazzei and Scott 22 when studying the stability of an internally damped shaft. If the backward mode eigenvalues described in equation (9) are observed, their real part is always negative, that is

so the backward modes are stable at all speeds, for any value of internal viscous damping and slenderness (represented by

Real part of the eigenvalues for and  , forward and backward modes, respectively, with
, forward and backward modes, respectively, with  and
and  , forward and backward modes, respectively, with
, forward and backward modes, respectively, with
However, the forward modes reveal a critical speed beyond which the real part of their eigenvalues is positive and hence unstable

This shows that if there is no external damping as in the case under study, then the critical speed is independent of the internal damping ratio, a conclusion also made by Melanson and Zu. 15 Consequently, equation (11) is the same critical speed expression calculated by Sheu and Yang 7 in their study of the stability of undamped rotating Rayleigh beams.
Figure 1(a) shows that the real part of the eigenvalues of the forward mode is monotonically growing and the backward mode is monotonically decreasing for spin speed. This performance has been previously noted in the literature.3,15,16,21 Accordingly, the real part of the forward mode reaches positive values once the critical spin speed is achieved, as it is shown in Figure 1(b), where the critical speed is independent of the internal damping ratio in the absence of external damping. Moreover, without external damping and a spin speed

which means that, in the absence of external damping, the instability starts when the spin speed equals that of the forward mode. This conclusion was reached by Genta, 3 Sheu and Yang, 7 and Ku 16 for the finite element model of a Timoshenko beam, and by Vatta and Vigliani 20 using a non-linear approach for internal damping. Genta 17 made the same conclusion when considering non-viscous hysteretic damping and studied the stability of a Jeffcott rotor and a simply supported Timoshenko beam.
In the presence of external damping, the critical speed is greater than that of forward bending mode because the external damping stabilizes the system, while internal damping destabilizes the system.3,14,16,18,22,24,27 Specifically, as shown in Figure 1(b), internal viscous damping stabilizes for speeds below the critical one and destabilizes for faster speeds. This is in agreement with the literature.3,13–15,21,22 Genta 17 shows that internal hysteretic damping behaves similarly.
Natural frequencies
In the previous section, the real part of the eigenvalues of forward and backward modes has been shown to be monotonically increasing and decreasing, respectively.3,15,16,21 A different trend is found, however, for the imaginary part of the eigenvalues associated with the backward mode, as it is shown below. In this section, the imaginary part of the eigenvalues (natural frequencies) is studied. The analysis focuses on the backward bending mode with a view to providing a detailed description of the sign change related to the slope of the corresponding natural frequency (minimum of the curve), the associated spin speed at which the sign change appears and the corresponding conditions of slenderness and damping ratios.
The eigenvalues for the forward and backward bending modes can be computed from equation (9), and their imaginary parts are, respectively, given as follows (see Appendix 1)

where, if the internal damping is neglected, the same expressions are found for the natural frequencies of the rotating Rayleigh beam compared to those obtained by Sheu and Yang 7 and Sheu 8 when considering rotary inertia and gyroscopic effects.
Figure 2(a) shows the natural frequencies of the first forward and backward bending modes according to spin speed
Campbell diagram for and , forward and backward modes, respectively, with and , forward and backward modes, respectively, with  ,
,  ,
,  ,
,
Figure 2(b) shows the natural frequency of the first backward mode for various internal damping ratios. It can be clearly seen that for a value
As previously mentioned, the aim of this article is to study in detail the behaviour of the natural frequency for the backward mode. To achieve this goal, the analytical expression for the spin speed that produces the sign change in its slope
Dependence of the natural frequency of the backward bending mode on the internal damping ratio
This section studies the influence of the internal damping ratio

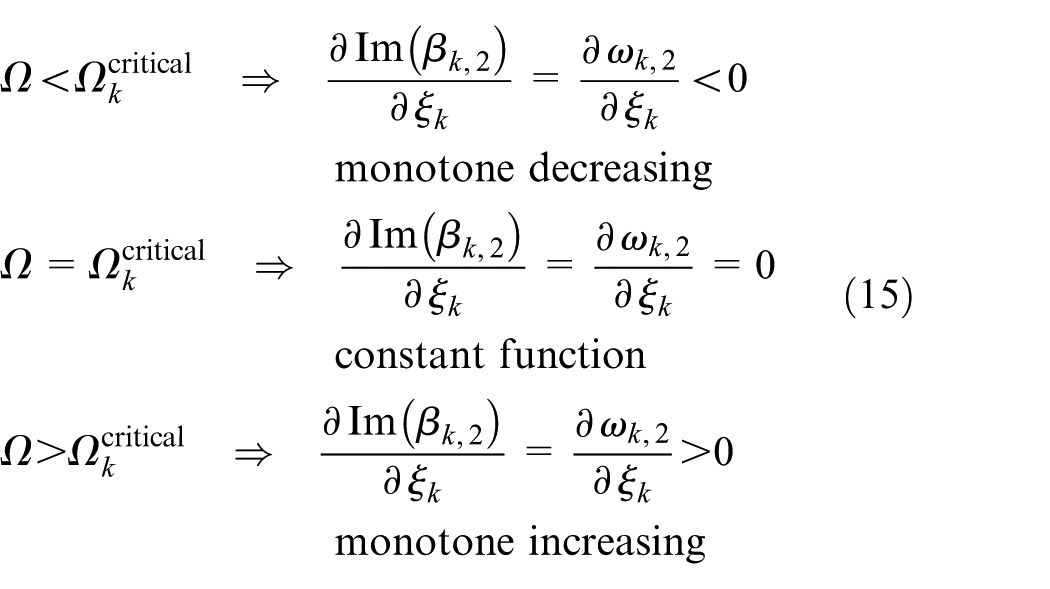
Accordingly, when the spin speed of the beam coincides with the critical speed of the forward mode, the natural frequency of the backward mode does not depend on the damping ratio. This is shown in Genta 3 and can be also seen in Figure 2(b) for the critical speed where all curves intersect at one point. The same occurs for the forward bending mode at this critical speed. If the spin speed is less than the critical value, the natural frequency of the backward mode will be monotonically decreasing, and if it is higher than critical speed, then the natural frequency will be monotonically increasing, as shown in Figure 3.
Natural frequency of the first backward bending mode for , , ,
This behaviour of the natural frequency of the backward mode with respect to the internal damping ratio can be described mathematically as follows
Behaviour of the natural frequency of the backward bending mode as a function of the spin speed
This section analyses the behaviour of the natural frequency of the kth backward bending mode with respect to the spin speed. As shown in Figure 2, the natural frequency of the backward mode reaches a minimum value from which it begins to increase. The numerical values involved depend on the slenderness and damping ratio. As in the previous section, to determine the minimum of the curve, the derivative of the imaginary part of the backward mode (see equation (13)) with respect to the spin speed is computed and set equal to zero. This yields the spin speed

From equation (16), the following sixth-degree polynomial is obtained for spin speed (see Appendix 1)

The roots of equation (17) provide the spin speeds
The sixth-degree polynomial could be reduced to a third degree with a simple change of variable. However, the analytic solution of the real root


where the fourth- and second-degree polynomials have analytical solutions.
To represent the spin speed



where
Beam properties.
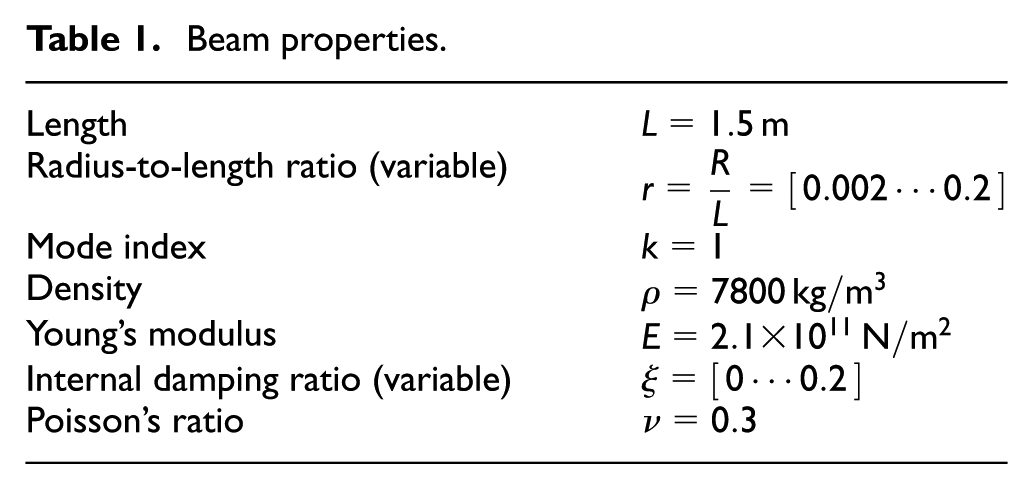
Once the properties of the Rayleigh beam and the polynomials (equations (17)–(19)) have been defined, the spin speed
(a) Spin speed for which the natural frequency of the first backward mode reaches the minimum value: , sixth-degree polynomial;  , fourth-degree polynomial;
, fourth-degree polynomial;  , second-degree polynomial. (b) Relative error in same magnitude: , fourth-degree polynomial compared to sixth-degree polynomial; - - - - -, second-degree polynomial compared to sixth-degree polynomial.
, second-degree polynomial. (b) Relative error in same magnitude: , fourth-degree polynomial compared to sixth-degree polynomial; - - - - -, second-degree polynomial compared to sixth-degree polynomial.
(a) Spin speed for which the natural frequency of the first backward mode reaches the minimum value: , sixth-degree polynomial; , fourth-degree polynomial; , second-degree polynomial. (b) Relative error in same magnitude: , fourth-degree polynomial compared to sixth-degree polynomial; - - - - -, second-degree polynomial compared to sixth-degree polynomial.
Figure 4(a) shows the spin speed for which the minimum value of the natural frequency of the backward mode is reached versus the parameter
So, for a fixed damping ratio, if the slenderness of the beam is greater than the critical slenderness, then the natural frequency of the backward mode reveals a minimum value from which it begins to increase, and so the curve is a concave function. However, if the slenderness is equal to or lower than the critical slenderness, then the natural frequency of the backward mode is a monotonically decreasing function, in the same way as its real part. It can also be seen that the greater the damping ratio, the greater the slenderness domain where the natural frequency minimum is reached.
Figure 5(a) shows again the same magnitude but, in this case, compared with the internal viscous damping ratio for various values of slenderness. For a fixed slenderness, the spin speed
Therefore, if the damping ratio is equal to or less than the critical ratio, then the natural frequency will not reach a minimum value and it will be a monotonically decreasing function. However, if the damping ratio is greater than the critical value, then there will be a natural frequency minimum and the function will be concave. It is worth noting that the greater the slenderness of the beam, the wider the damping ratio domain where the natural frequency of backward mode reaches a minimum value.
Figures 4(b) and 5(b) show the relative error made by simplifying the original sixth-degree polynomial to fourth- and second-degree ones. Both figures show that the error is negligible across the entire domain, except when approaching the critical value where the error tends to infinity, in the same way as spin speed

Before continuing with the study, it is worth analysing what happens when there is no internal viscous damping
To complete the study of the natural frequency behaviour associated with the backward mode, the critical values of slenderness and damping ratio, reflected in Figures 4 and 5, respectively, must be analysed. These values determine whether or not a minimum value of the natural frequency is reached with the spin speed. Figures 4(a) and 5(a) show that for each damping ratio, there is a critical slenderness and vice versa. Figure 6(a) shows the critical damping ratio depending on the slenderness of the beam for the three polynomials considered. The sixth polynomial has been calculated numerically, while the solutions of the fourth- and second-degree polynomials have been computed analytically. It can be seen that the critical damping ratio increases with the parameter
(a) Critical internal damping ratio: , sixth-degree polynomial; , fourth-degree polynomial; , second-degree polynomial. (b) Relative error: , second-degree polynomial compared to sixth degree.
The behaviour of the fourth-degree polynomial solution is very similar to that associated with the sixth-degree polynomial. However, more relevant discrepancies are found when the second-degree polynomial is considered, as shown in Figure 6(b). It can be observed that the difference between the numerical critical damping ratio (sixth-degree polynomial) and the analytical critical damping ratio (second-degree polynomial) is nearly constant, with an approximate value of 16%. Therefore, it is possible to obtain a semi-analytical expression for the critical damping ratio of the sixth-degree polynomial from the second-degree polynomial plus a correction factor.
The analytical critical damping ratio of the second-degree polynomial is given by the following expression (see Appendix 1)

Taking into account the aforementioned correction factor yields

where
To validate the last expression, Figure 7(a) represents the numerical critical damping ratio of the sixth-degree polynomial and the semi-analytical critical damping ratio calculated from equation (25).
(a) Critical internal damping ratio for sixth-degree polynomial: , numerical critical damping ratio; , semi-analytical critical damping ratio. (b) , relative error between both magnitudes.
It can be seen that the numerical and semi-analytical critical damping ratio curves of the sixth-degree polynomial are almost undistinguishable curves with a very small discrepancy in most of the domain (see Figure 7(b)). Therefore, the semi-analytical critical damping ratio
Finally, a comparison is carried out between the spin speed
Figure 8(a) shows that the greater the internal damping ratio, the wider the interval domain of the beam slenderness in which the spin speed
Ratio of the spin speed for which the natural frequency of the first backward mode reaches the minimum value to the critical spin speed of the forward mode. (a) , , , , , ,
If the slenderness of the beam and its internal damping ratio are known, the speed ratio can be evaluated analytically as follows

If
Conclusion
In this article, an analytical formulation to assess the behaviour of natural frequency of the backward bending mode of a simply supported rotating Rayleigh beam with internal damping has been developed. Results are presented confirming that the behaviour of the natural frequency of the backward mode is not always monotone decreasing, as it has been commonly reported in the literature for the undamped case. It has been shown here that if the beam is internally damped, then the natural frequency can reach a minimum value.
The ultimate aim of this work has been to determine the spin speed at which the minimum natural frequency for backward mode is reached, and to analyse the conditions of slenderness and internal viscous damping for this phenomenon to occur. The influence of the internal damping ratio on the natural frequency has been analysed in detail, and a relationship has been found with the critical speed of the forward mode. To evaluate the conditions leading to the minimum value of the natural frequency of backward mode, the influence of spin speed has been studied. The damping ratio and slenderness intervals where the natural frequency reaches a minimum value have been also analysed through the critical damping ratio. It can be concluded that the greater the beam slenderness, the lower the critical damping ratio, and therefore the natural frequency of the backward mode is more likely to reach a minimum value. Moreover, a speed ratio has been defined to determine if the minimum natural frequency occurs before or after the forward mode is destabilized.
Footnotes
Appendix 1
The eigenvalues of the simply supported Rayleigh beam are given by equation (9). If the next expression is considered
where the constants are the given by
Then, equation (13) is derived from equations (27) and (28).
The imaginary part of the eigenvalue associated with the backward bending mode given by equation (13) is derived with respect to the internal damping ratio. Equating to zero yields
Squaring both sides of equation (29) leads to
where the internal damping ratio has been cancelled. If the spin speed is computed from equation (30), equation (14) is proved.
If the imaginary part of the eigenvalues corresponding to the backward bending mode (equation (13)) is derived in terms of the spin speed, and the derivative is set equal to zero, equation (17) is proved. The polynomial coefficients are the following
with the notation
The second-degree polynomial defined in equation (19) defines the spin speed where the natural frequency of the backward mode reaches a minimum value. This provides
and therefore
so the condition for the spin speed
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors gratefully acknowledge the financial support of Ministerio de Ciencia, Innovación y Universidades – Agencia Estatal de Investigación and the European Regional Development Fund (project TRA2017-84701-R), as well as Generalitat Valenciana (project Prometeo/2016/007) and European Commission through the project ‘RUN2Rail – Innovative RUNning gear soluTiOns for new dependable, sustainable, intelligent and comfortable RAIL vehicles’ (Horizon 2020 Shift2Rail JU call 2017, grant number 777564).