
Abstract
Due to the complex uncertainty of working loads and design parameters, time-dependent reliability estimation is time-consuming. Various works aim to improve the accuracy and efficiency of time-dependent reliability estimation methods with a known time-dependent response of the mechanical system. Time-dependent reliability calculation with complex uncertainty and unknown limit state function are more complex. In this article, surrogate modeling and data clustering technology are utilized to estimate the time-dependent reliability of mechanical structure. First, the physics of failure with respect to time for a mechanical structure is analyzed, and BP neural network is introduced to build the surrogate model of time-dependent response for mechanical structure. Second, data clustering technique is used to find the most probable failure domains. Furthermore, the Genetic Algorithm is utilized to search the extreme values of the response at the most probable failure points during the given time interval. Then, the surrogate model for the extreme values at the most probable failure points is approximately established using BP neural network and Monte Carlo simulation is used for time-dependent reliability estimation. Finally, two examples are presented to verify the accuracy and efficiency of the proposed method.
Keywords
Introduction
Reliability is defined as the probability that a system/component performs its intended function successfully for a given period of time, under stated conditions.
1
It is an important engineering requirement during products development. Therefore, to improve products reliability, reliability modeling methods, and reliability estimation methods have been widely developed and used in reality. For reliability estimation, two types of methods, namely, instantaneous reliability estimation approaches2–4 and time-dependent reliability estimation methods,5–7 have been studied in the field. Since the mechanical systems become more and more complex, multi-failure modes occurring and time-consuming design of experiments (DOE), instantaneous reliability estimation techniques by data-driven technology combining with physics of failure modeling methods have been developed and widely used in aerospace, transportation, oil and gas exploration, and petrochemical industries.8–12 In these studies, how to choose key points to improve the accuracy and efficiency of physics of failure modeling, and the performance of different surrogate modeling methods were recently studied and demonstrated. Due to the more complex uncertainty, time-dependent reliability estimation is more complex than the traditional ones. Many research works focused on using the first upcrossing methods and extreme value methods to approximately estimate the time-dependent reliability. The main idea of first upcrossing methods is to calculate the probability of the time-dependent response exceeding its failure threshold for the first time within a given time interval. However, the first upcrossing is an uncertain event, thus it is difficult to estimate the probability of the first upcrossing. Therefore, various works focus on how to approximately calculate the first upcrossing rate efficiently and accurately based on the Rice formula.
13
Furthermore, it is difficult to quantify the correlation between upcrossings. The direct thoughts of extreme value methods are to calculate the time-dependent reliability based on the distribution of extreme values of system response for a given time interval. However, due to the highly nonlinear and dynamic characteristics of time-dependent system, it is difficult to estimate the probability density function (PDF) of the extreme value. To solve these problems, DOE combining with surrogate modeling techniques have been developed to approximately establish the extreme response model, then Monte Carlo (MC) simulation was used to estimate the probability that the extreme values exceed its failure threshold. Chen and Li
14
proposed a probability density evolution method, which estimates the instantaneous PDF and the evolution of dynamic response of nonlinear system. Wang and Wang
15
proposed a surrogate modeling method to obtain the extreme response model using efficient global optimization (EGO) approach,
16
in which the random variables
Data clustering is a technology to identify the clusters with some common characteristics based on a certainty calculation measure (e.g. Euclidean distance). 20 It is an important step in pattern recognition and machine learning. 21 Clustering algorithms have been widely used, such as data mining, 22 machine learning, 23 scene recognition, 24 and so on. In this article, data clustering with K-means algorithm is incorporated to identify the most probable failure domains.
The main contributions of this work are (1) using BP neural network to establish a surrogate model of time-dependent response, and extreme value of response during the given time interval; (2) introducing data clustering technology to identify the most probable failure domains, which can reduce the DOE tests; and (3) using Genetic Algorithm to search the global extreme values of the most probable failure points during the predefined time intervals.
The rest of this article is organized as follows. In the “Time-dependent response modeling based on BP neural network and data clustering” section, the time-dependent response modeling processes based on BP neural network and data clustering is provided, which includes three steps: (1) Initial surrogate modeling of time-dependent response using BP neural network; (2) Most probable failure domains identification using data clustering technology; and (3) Extreme value of response at each initial input is searched using Genetic Algorithm, and the surrogate model of
Time-dependent response modeling based on BP neural network and data clustering
Let

where
The direct thoughts of time-dependent reliability estimation based on extreme value method is first to find the extreme values of mechanical system

For a highly nonlinear dynamic system, it is difficult to obtain the PDF of the extreme values
In this article, a time-dependent reliability method based on surrogate modeling and data clustering algorithm is proposed. The following three main steps are used for time-dependent reliability analysis in the proposed method. The details of each step are given in the following subsections. (1) Initial time-dependent surrogate modeling using BP neural network; (2) Most probable failure domains identification using data clustering; (3) Extreme values searching using Genetic Algorithm, and surrogate modeling for extreme values
Initial surrogate modeling based on BP neural network
For the initial surrogate modeling for time-dependent response, small size of training data (k) is generated.

where f is an active function,
In this article, the mean squared error of the model on the test set is used to measure the accuracy of BP neural network modeling. If

To minimize the mean squared error, the weights

where
The initial surrogate model for time-dependent response is developed using BP neural network, the detailed algorithm is given in Table 1. The expected improvement function in equation (6) is used as the convergence criterion of BP neural network modeling

where


Initial surrogate modeling for time-dependent response.

Repeat steps 4–6 until the surrogate model converges.
Most probable failure domains identification using data clustering algorithm
There are many clustering algorithms; in this article, clustering based on K-means algorithm is introduced to identify the most failure domains as in equation (9)

where d is a distance measure between a data point
To cluster data using the K-means algorithm, first, K centers are selected randomly using priori information. Then, the original data are assigned based on the certain distance measure algorithm. Finally, the K centers are recalculated and updated according to the associated groups. This process is repeated until the K centers cannot be updated.
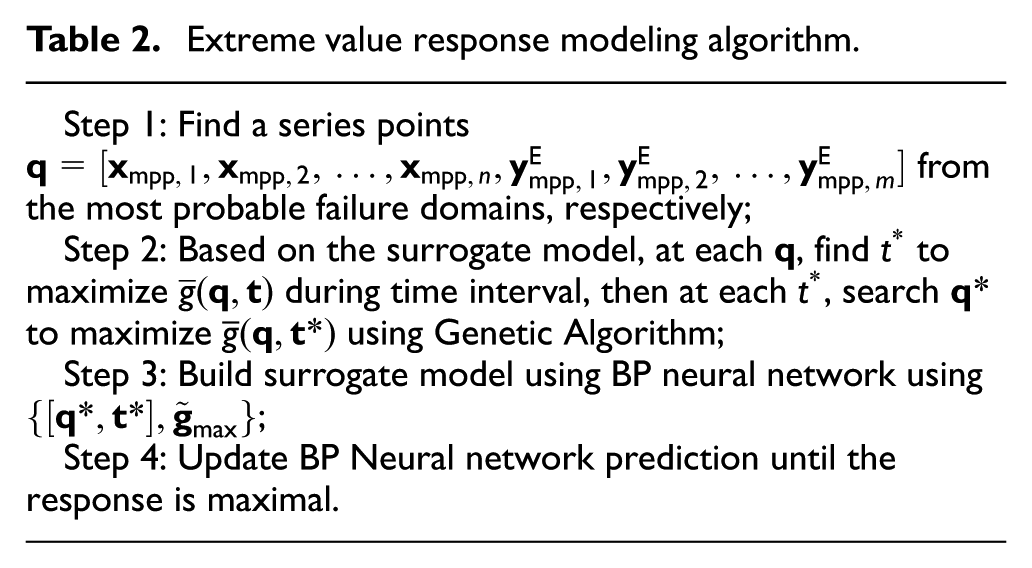
Surrogate modeling for extreme value
The extreme value of time-dependent response at each input during time interval

With the inputs and the respective extreme value, and most probable occurring response, the BP neural network is then built.
Based on the inputs
Extreme value response modeling algorithm.
Reliability estimation
In this article, the data information and physical model of failure are combined to estimate the system reliability. We assume that the performance of the system is tested at some data points. Then neural network modeling method is introduced to formulate the physical model of failure for the system.
Time-dependent reliability estimation is transformed into calculate the reliability of

In particular, MC simulation method is used to calculate this probability using equation (12)

where
Numerical examples
A nonlinear mathematical model
Time dependent response of x and t is given in equation (13), where x is a random variable following a normal distribution

The time-dependent reliability is given by equation (14)

The detailed procedure is as follows:
Generate 20 initial training points
Clustering the 1000 candidate points, calculate the joint probability density (JPD) values and response of these candidate points, then, using data clustering technology to identify the most probable failure domain with 99.7% confidence interval, the clustering results are illustrated in Figure 3. Based on the information of response values with respect to random inputs within the four clusters, each data cluster is cleated again, and the results are displayed in Figure 4.
Select points at the most probable failure domains, using the initial surrogate model built in step 1 and Genetic Algorithm to search the global extreme values of the most probable points during the time interval [1, 2.5], the BP neural network parameters setting is displayed in Table 3.
Using the most probable points

The contour of the true model and the DOE tests.

The contour of the initial surrogate model.

K-mean value clustering results using Joint PDF and time-dependent response.

K-mean value clustering results using random input and time-dependent response.
Network parameters setting of example 1.

Then, equation (12) is used to calculate the time-dependent reliability using the surrogate model of extreme values of system response, the results using the proposed method and MC simulation using
The time-dependent reliability estimation results.

Time-dependent reliability estimation of a cantilever beam
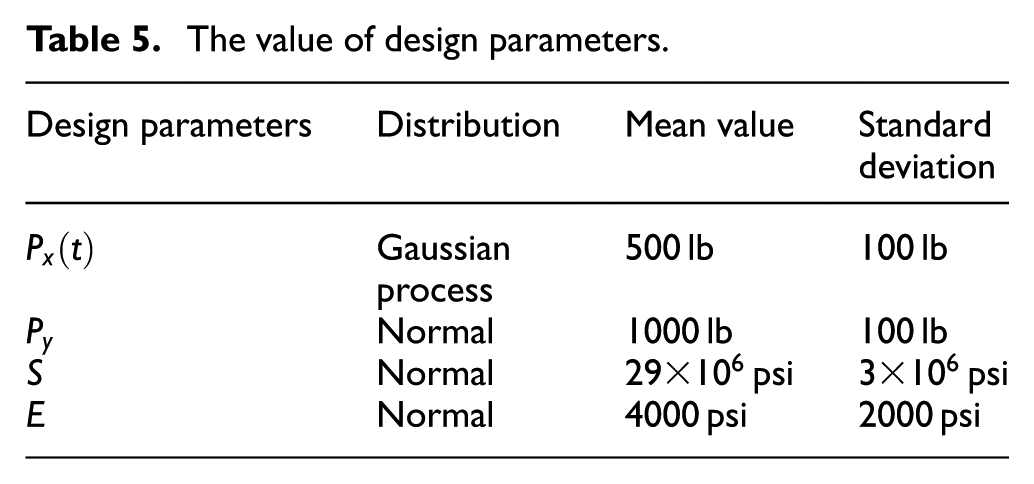
A cantilever beam is illustrated in Figure 5, in which b and h are width and height of the cross section, respectively. The physics of failure is that the tip displacement exceeds an allowable value D0. The distribution information of design parameters are displayed in Table 5,



A cantilever beam.
The value of design parameters.
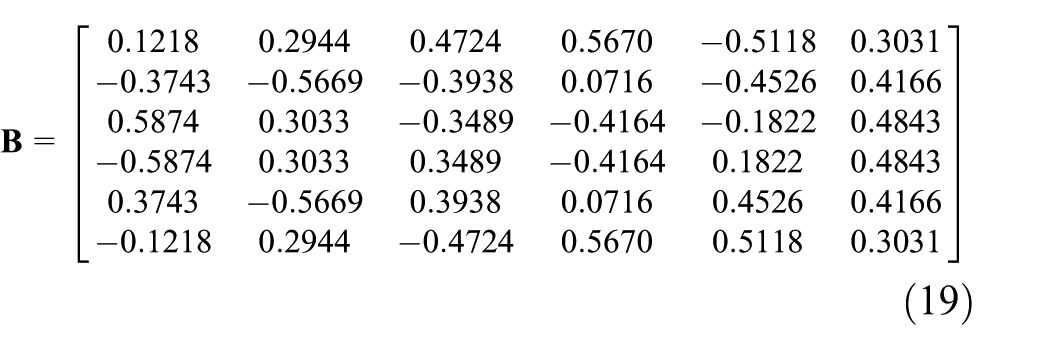
The Gaussian process

where

The number of dominated eigenvalue
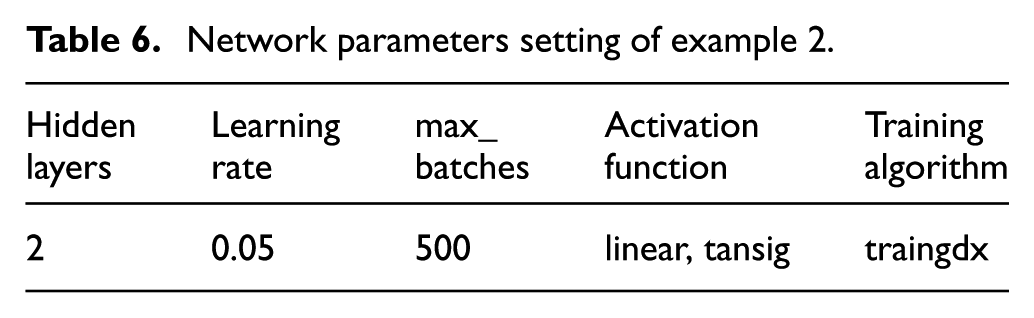
The clustering results at different time interval are displayed in Figure 6. In Figure 6, based on the uncertainty loads and time-dependent response, the data are clustered into four groups, and the most probable failure domains can be identified. Then the prediction input data are generated from these domains, and the initial surrogate model of response at these input data and surrogate model of extreme values are built using BP neural network, the network parameters are set as Table 6. The reliability estimation results using the proposed method and MC simulation using

The clustering results using Px loads and time-dependent response.
Network parameters setting of example 2.
The time-dependent reliability estimation results of example 2.

Conclusion
How to estimate system reliability with high accuracy and efficiency is the key problem of complex systems. In the current work, BP neural network modeling is introduced to predict the reliability of complex system under uncertainty working conditions, and data clustering method is incorporated to identify the most probable failure domains. The performance of the proposed method is validated using three mechanical applications. Most probable failure domain identification using data clustering can improve the efficiency of extreme value searching; the performance of other data clustering algorithms and more mechanical engineering applications will be further studied in the next step.
Footnotes
Appendix 1
Handling Editor: José Correia
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Contract No. 51405067 and by the Fundamental Research Funds for the Central Universities under Contract No. ZYGX2016J113.