
Abstract
A new adaptive tracking control problem of a nonlinear teleoperation system is considered in this article, which differs from the previous ones in that both kinematics and dynamics of manipulators are uncertain and perturbation of the actuator parameters exists due to overheating of the actuator. To overcome the first which is also the key problem, we propose a new adaptive tracking control framework which additionally contains a neural network mechanism and a robust adaptive mechanism. Based on the framework, an adaptive controller is further established to compensate for the perturbation of the actuator parameters online. By employing the neural networks and adaption method in control design, an extended teleoperation control system is effectively accommodated. With the Lyapunov theory, the tracking error is shown to converge to a residual around zero as the time goes to infinity. The effectiveness of the proposed scheme has been verified in the physical platform.
Introduction
In recent years, research of bilateral control for nonlinear teleoperation system has collected much attention over the last decades due to its various applications such as disaster rescue, undersea exploration, surveillance, and data acquisition, as observed in the literature.1–8 Lee and Spong 1 defined a control framework and proposed a position feedback approach for bilateral teleoperation with a proportional–derivative (PD) controller. Chopra et al. 2 presented a passivity-based control algorithm such that a good position tracking performance can be guaranteed using additional position control on both master and slave robots. Note that the scattering-based methods cannot guarantee position tracking in the presence of time delay, which is in fact a tedious task. Chopra et al. 3 raised a coordination architecture to ensure state synchronization of a teleoperation system without using the scattering transformation, which was only applicable to systems without gravity. Subsequently, Nuno et al. 4 proposed an adaptive technique to remove this restriction. In Nuno et al., 5 a globally stable PD-like controller was newly designed to achieve the synchronization of bilateral teleoperation without the delayed derivative action. Moreover, Hashemzadeh et al. 6 developed a new algorithm, which was capable of handling actuator saturation of a bilateral teleoperation system. However, all the mentioned control schemes above are only applicable to the state synchronization of the joint space. Actually, in the control of a teleoperation system, tasks to be executed are usually given in the Cartesian space, which are more convenient in practical application.
Compared with the joint-space tracking control problem of a teleoperation system,1–6 task-space tracking control of a teleoperation system is more challenging due to the coupling of kinematic and dynamic uncertainties, which has been an active research topic in recent years. Kawada et al. 9 proposed a task-space controller to guarantee the delay-independent asymptotic stability of a teleoperation system. In Nath et al., 10 by combining a nonlinear observer and the invertible transformation technique, a new controller was designed for bilateral synchronization of a kinematically redundant teleoperation system. Wang and Xie 11 presented a delay-robust control scheme to achieve position/orientation synchronization based on the task-space passivity framework, in which the Jacobian matrix was assumed to be known. To deal with the uncertain kinematics and dynamics preceded by robotic systems, some interesting results have been presented in the literature.12–15 Cheah et al. 12 developed an adaptive Jacobian controller for the tracking control of a manipulator with kinematic and dynamic uncertainties. Moreover, Wang and Xie 13 further proposed an adaptive inverse dynamics controller to ensure the uniform performance of robot over the entire workspace. Talebi and Khorasani 14 presented a neural network (NN)-based method to counteract the effect caused by uncertainties in the model and sensory measurements. Clearly, the control for robot with uncertain kinematics and dynamics has also received much attention. However, the aforementioned works only consider a single robot and their proposed schemes may not be applied to the teleoperation system.
To cope with the control problem of the teleoperation system with uncertain kinematics and dynamics, much effort has been made in previous studies.16–22 Especially, in Liu and Chopra, 16 an adaptive control algorithm was designed to guarantee the task-space synchronization of a teleoperation system. As an extended research, Liu and Khong 17 further proposed an alternative control algorithm for nonlinear teleoperators with uncertain kinematics and dynamics, in which the requirement of task-space velocity information was removed. In Zhao et al.,18,19 fuzzy adaptive control approaches were proposed to handle the uncertainties of nonlinear systems. Furthermore, by incorporating a switching-based approach, a unified framework was presented to handle the kinematic uncertainties in Zhai and Xia. 20 However, all the aforementioned control schemes ignore actuator uncertainty. In fact, actuator parameters usually vary due to overheating of the actuator or changing ambient temperature, which may cause the degradation of control performance. As a matter of fact, it is still a challenging and unsolved problem to ensure the performance of the teleoperation system with uncertain kinematics, dynamics, and actuator model.
Motivated by such an observation, in this article, we propose an adaptive controller for tracking control of a teleoperation system. One of the major difficulties that obstruct the implementation of the proposed scheme is how to ensure the control performance of a teleoperation system with uncertain kinematics, dynamics, and actuator model. To remove this obstacle, NNs are designed so that the kinematic and dynamic uncertainties can be handled. Moreover, an adaptive controller is established to compensate for the perturbation of actuator parameters online. In summary, this article has the following contributions:
Being different from the previous task-space tracking controller,16,17,20 the newly proposed one additionally contains a NN mechanism and an adaptive mechanism. Specifically, the proposed NN mechanism is designed to deal with the unknown dynamics, which successfully eliminate the restriction in previous studies16,17,20 that robot’s mechanical structure is supposed to be known. Subsequently, the adaptive mechanism is employed to cancel the overlarge NNs compensation error. As a result, the proposed adaptive tracking controller is more feasible than those traditionally presented.
Compared with the schemes developed in previous studies,16,17,20 the actuator parameter transform matrix and parameter adaption law are designed to counteract the effect of overheating of the actuator on tracking control performance. Furthermore, the proposed adaptive tracking controller ensures that the tracking error converges to a small neighborhood of zero, without the need for known kinematic and dynamic parameters.
The remainder of this article is organized as follows. In section “System description and problem statement,” the problem formulation and preliminaries are presented. An adaptive tracking control approach is proposed in section “Adaptive tracking control design” and the experimental results are given in section “Experimental results and analysis.” Finally, this article is concluded in section “Conclusion.”
System description and problem statement
Overview of the teleoperation system
We have implemented a teleopeartion system in our laboratory for the testification of the proposed tracking control approach (Figure 1). The experimental testbed is composed of two heterogeneous robots. The master robot is a Dobot manipulator with 3 degrees of freedom (DOFs), and the slave robot is an AnnoRobot manipulator with 6 DOFs. Specifically, the Dobot manipulator is equipped with an electronic control board and a touch screen. The rigid AnnoRobot manipulator consists of six links and six rotational joints. Moreover, network adapter is installed in the two heterogeneous robots, respectively, and they can communicate with each other through Transmission Control Protocol (TCP) sockets.

Block diagram of the proposed control scheme.
A closed-loop control architecture for a teleoperation system is constructed. Two major features of teleoperation have been implemented as follows:
Using the network adapter, the master robot can communicate with the slave robot. Thus, remote control could be completed.
The master robot is equipped with touch screen. The slave robot can be remotely controlled to accomplish specific tasks.
Problem statement
As illustrated in Figure 1, the teleoperation system consists of the master manipulator and slave manipulator. Let


where
It is well known that the dynamic differentiation equation of the teleoperation system can be expressed as follows

where
Note that the dynamic model (3) has the following properties:
Property 1. The inertial matrix
Property 2.

Property 3. For any differentiable vector, the following equation holds

where
To deal with the unknown dynamic parameters, the radial basis function neural networks (RBFNNs)23–26 are employed. In general, the RBFNN contains three layers including the input layer, hidden layer, and the output layer. The input vector x is in the input layer, and each node in the hidden layer includes a Gaussian basis function, which can be formulated as follows

where
Lemma 1
Let

where
Adaptive tracking control design
Clearly, the Jacobian matrix J is unknown. We design

For stabilizing the system in equation (3), the nominal reference of joint-space velocity is defined as

where the subscript
Subsequently, an adaptive sliding vector

From the definitions of

Adaptive controller design
In this article, NNs are used to approximate the dynamics (equation (3)) for its excellent approximation ability. To alleviate the computational burden, the dynamics (equation (3)) are divided into two parts. Specifically, let
From Lemma 1, we have


where
Now, we present the proposed tracking controller as follows

where
Specifically

where

where
By substituting the controller equation (12) into the dynamics equation (3), the closed-loop teleoperation system can be formulated as

where
In combination with the definition of

where
By substituting equation (15) into equation (14), the closed-loop dynamics can be further rewritten as

where

Multiplying

The parameter adaption law for the actuator is defined as

The parameter adaption law is defined as

The robust adaptive compensator is defined as

The parameter adaption laws for NN are given as


where
Remark 1
In contrast to the existing works dealing with kinematic uncertainty, the difference should be clarified. The feedback part in equation (12) can be reformulated as
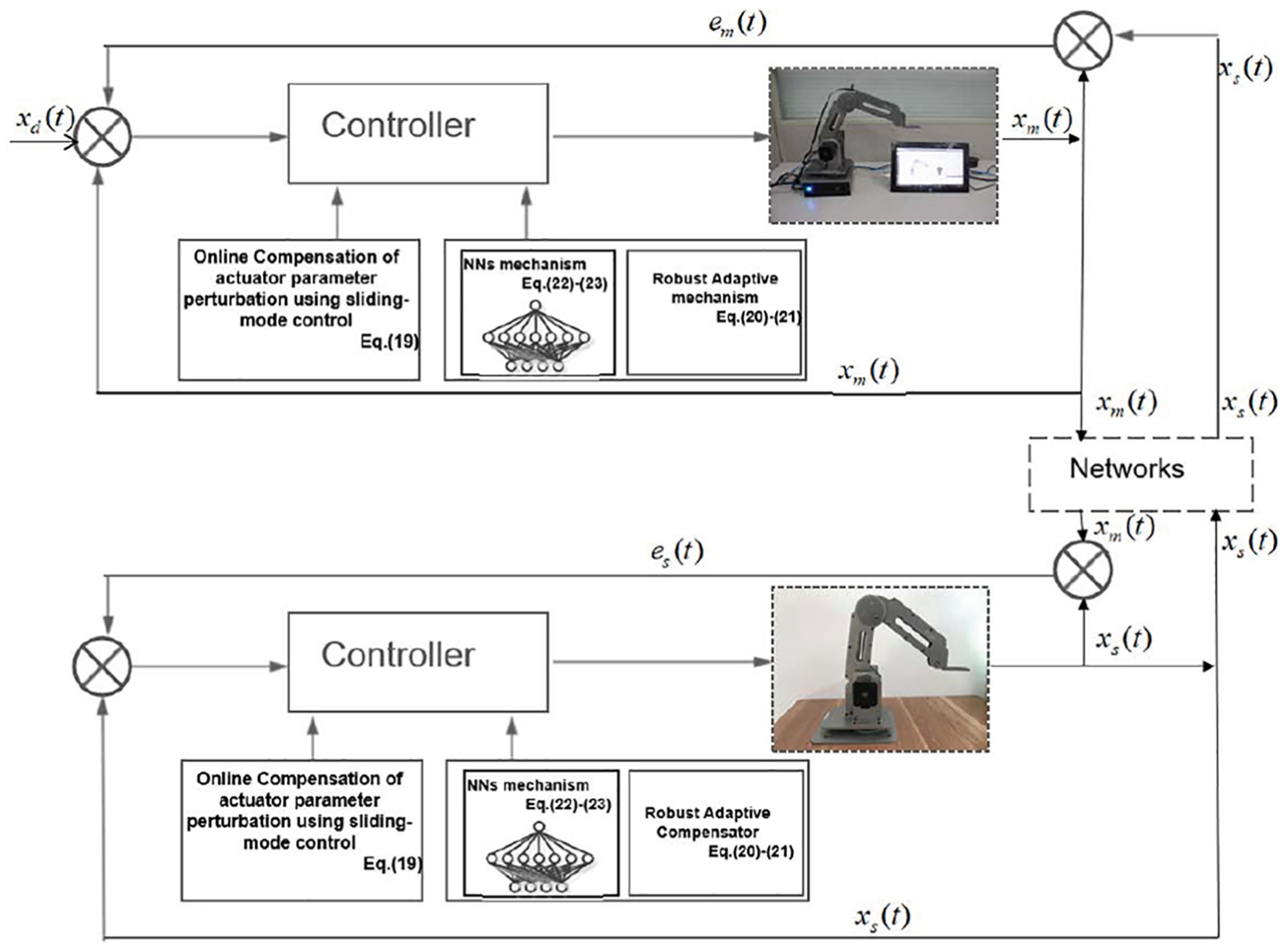
Closed-loop control architecture.
Stability analysis
Theorem 1
Consider a teleoperation system with uncertain kinematics and dynamics controlled by the proposed controller (equation (12)) with the corresponding adaption rules given by equations (19)–(23). It is proven that all physical variables in the closed-loop system remain semi-globally uniformly ultimately bounded (SGUUB). Moreover, the tracking errors
Proof
The designed Lyapunov function candidate consists of two parts, which are


where
By differentiating

Substituting equations (17)–(19) into equation (26), we have

Using Property 2, equation (27) can be formulated as

By combining the definition of
Invoking equation (20) yields

By recalling

From the definition of

In combination with the definition of variable B, substituting equations (29)–(32) into equation (28) yields
Subsequently, differentiating

Using the parameter adaption laws (equations (21)–(23)),

Invoking Yong’s inequality, we have



By differentiating

where

Supposing that the gain matrices

where
Thus,

where

As indicated in equation (43), the Lyapunov function candidate V is nonincreasing. Subsequently,
Experimental results and analysis
System setup
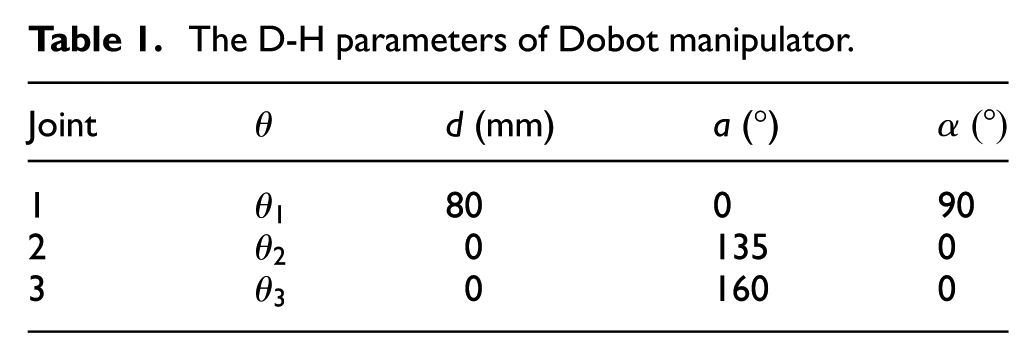
To validate the proposed control scheme, we have established the testbed (Figure 3). The experimental setup and system implementation are described in this section. The D-H parameters of Dobot and AnnoRobot manipulators are presented in Tables 1 and 2. In addition, two scenarios involving bilateral synchronization and effectiveness verification are carried out.

Schematic diagram of the established testbed.
The D-H parameters of Dobot manipulator.
The D-H parameters of AnnoRobot manipulator.

The proposed control system consists of two parts including the main control board and the driving board. Specifically, the ATmega64 acts as the chipset of the driving board, and it has three important functions: first, it collects the real-time data through a set of sensors, for example, the angle velocity
Experimental results
In the first case, the objective is to control the end effector of the slave manipulator to track one of the master manipulators. Both the master and slave robots are Dobot manipulators. The robotic manipulators are initialized as
To show the effectiveness of the proposed scheme in terms of tracking performance, the motion trajectory of the master’s end effector is expected to be a right triangle, and the three vertices of the right triangle are defined as

Case 1: x position trajectories and tracking errors.
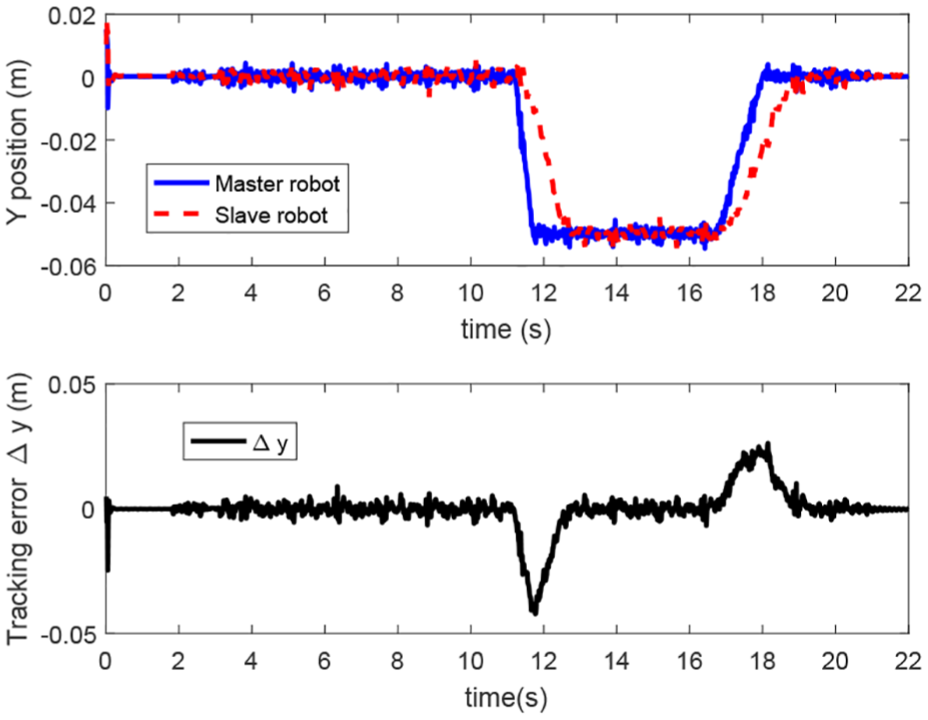
Case 1: y position trajectories and tracking errors.
To further demonstrate the effectiveness and the general applicability of the proposed algorithm, comparative experiments with the one in Liu and Khong
17
are carried out. In the second case, the master and slave robots are, respectively, Dobot manipulator and AnnoRobot manipulator. To simulate the working condition of overheating of the actuator, both the master and slave robots are required to perform 20,000 reciprocating motions and each duration lasts 5 s. Subsequently, the master robot is required to draw a rectangle and the corresponding coordinates of the four vertices are defined as
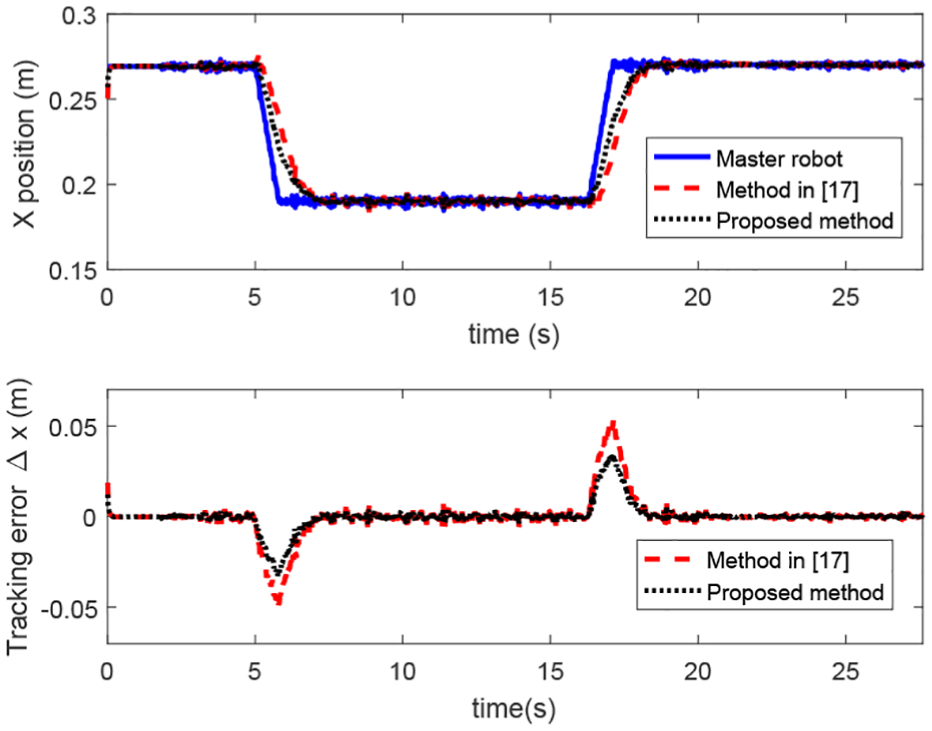
Case 2: x position trajectories and tracking errors.

Case 2: y position trajectories and tracking errors.
Conclusion
In this article, we consider the adaptive tracking control problem of a teleoperation system with uncertain kinematics and dynamics. A novel actuator update law is proposed to compensate for the actuator parameters’ perturbation. By resorting to the adaptive control technique and in combination with the NN technique, an adaptive tracking control approach is established such that the tracking errors are steered into an adjustable neighborhood of zero. Finally, the effectiveness of the proposed control approach was confirmed by experimental results.
Footnotes
Handling Editor: Dan Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant Nos 61573108, U1613223, U1501251, and U1613223, in part by the Natural Science Foundation of Guangdong Province under Grant Nos 2016A030313715 and 2016A030313018, in part by the China Postdoctoral Science Foundation under Grant No. 2018M633353, in part by the Fundamental Research Funds for the Central Universities under Grant No. ZYGX2016J140, in part by the Scientific and Technical Supporting Programs of Sichuan Province under Grant Nos 2016GZ0395, 2017GZ0391, and 2017GZ0392, in part by the Science and Technology Project of Guangdong Province under Grant No. 2016A020220003, and in part by the Science and Technology Planning Program of Zhongshan City under Grant Nos 2017SF0603 and 2017A1024.