
Abstract
Bearing fault diagnosis attracts great attention because the bearing condition has direct effects on productivity and safety in industry. To accurately identify the operating condition of bearings, a novel bearing fault diagnosis method based on adaptive local iterative filtering–multiscale permutation entropy and multinomial logistic model with group-lasso is first put forward in this article. In the proposed method, adaptive local iterative filtering was applied to decompose the nonlinear and non-stationary vibration signals into intrinsic mode functions. The multiscale permutation entropy values of the first several intrinsic mode functions were calculated to characterize the complexity of intrinsic mode functions in different scales, and they constructed feature vectors after normalization. Multinomial logistic model with group-lasso could perform multiple classifications with an embedded approach for feature selection, which is distinct from the traditional methods with two steps of dimensionality reduction and classification. Finally, the proposed method was verified with experiment data from Case Western Reserve University considering four conditions: different fault types, different damages, multiple types, and different loads. The results indicate that the proposed method is effective in identifying different categories of rolling bearings.
Keywords
Introduction
Rolling element bearings are critical components in rotating machines, and their states in operation have direct effects on productivity and workers’ safety in industry, and fault diagnosis in the early stage could guide maintenance as well as avoid huge economic losses. The framework of fault diagnosis for bearing usually consists of five parts: data acquisition, data preprocessing, feature extraction, dimensionality reduction, and fault classification.1–3 Since vibration signals contain rich information and are easily acquired, the fault type of bearings could be diagnosed with classifiers according to the prominent fault features extracted from the operating status of bearings.
Preprocessing is necessary for vibration signals of bearings due to the nonlinear and non-stationary characteristics, as well as with abundant noise and multiple vibration interferences. The traditional method is discrete wavelet transforms (DWTs); 4 however, the basis function has to be predefined according to the characteristic of the signal. Adaptive mode decomposition methods could decompose complex signals into intrinsic mode functions without consideration of any basis construction and parameter presupposition. 5 The representative is empirical mode decomposition (EMD);6,7 however, it suffers from the problems of mode mixing, end effects, and intermittency. Modifications referring to EMD are proposed, such as ensemble empirical mode decomposition (EEMD),8,9 local mean decomposition (LMD),10–12 variational mode decomposition (VMD),13,14 and empirical wavelet decomposition (EWD).15,16 Recently, adaptive local iterative filtering (ALIF), as a new signal decomposition method, has been proposed by Cicone et al. 17 The ALIF algorithm achieves the decomposition with iterative filters generated by the Fokker–Planck (FP) equation and an adaptive and data-driven filter length selection. It could inhibit problems existed in EMD to some extent such as mode mixing.18–20 Therefore, ALIF is employed in this article to decompose vibration signals.
Prominent features will be critical in the fault diagnosis, and multiple domain features are investigated, including root mean square, kurtosis, and skewness in time and frequency domains, respectively, as well as short-time Fourier transform (STFT) 21 in time–frequency domain. 22 However, the vibration signals are often characterized by nonlinearity due to the factors of clearance and nonlinear stiffness of bearings. Therefore, these commonly used time–frequency analysis techniques may exhibit limitations because of their linearity assumption. To deal with the nonlinear dynamic characteristics of bearing fault signals, several entropy-based approaches have been proposed for bearing fault diagnosis, such as approximate entropy (ApEn),14,23 sample entropy (SaEn),24,25 and fuzzy entropy.26,27 However, ApEn heavily relies on data length and lower estimation value. Although SaEn is insensitive to the data length and immunity to the noise in the data, it is based on the Heaviside step function which is discontinuous and mutational at the boundary. Fuzzy entropy is defined using the concept of membership function whose determination is usually difficult and not accurate. Moreover, ApEn and SaEn estimate the complexity at a single scale, which give rise to unacceptable results when applied to analyze the multiple time scale data. To overcome this disadvantage, multiscale entropy (MSE) was proposed by Costa et al. 28 to measure the complexity of time series over a range of scales. 11 Recently, a new entropy called permutation entropy (PE) was proposed by Bandt and Pompe 29 to measure the complexity and assess the status of the mechanical system. 30 Since the PE method measures the complexity through comparing the neighboring values, it is simple, immune to noise, and suitable for online monitoring. Based on the PE method, multiscale permutation entropy (MPE) was proposed by Aziz and Arif, 31 which was used to estimate the complexity of the time series in different scales. In addition, the advantages of MPE have been validated, such as stability and robustness; moreover, MPE has better performance compared with PE in application of bearing fault diagnosis.32–36
There are two types of classifiers for fault diagnosis based on the vibration data, which, respectively, are statistical models and data-driven models. The statistical models include hidden Markov model (HMM),32,33 variable predictive model-based class discrimination (VPMCD), 3 and so on, while the data-driven models include support vector machine (SVM)37–39 with optimization,40–42 multiclass relevance vector machines (M-RVMs), 30 artificial neural network (ANN),7,11 adaptive neuro-fuzzy inference system (ANFIS), 27 and so on. The classifiers above have their own advantages in some aspects for bearing fault classification but shortcomings as well, 27 and they all need to reduce the dimensionality of features with approaches like local linear embedding (LLE), 1 principal component analysis (PCA), 2 and non-negative matrix factorization (NMF). 21 However, the new feature space based on dimensionality reduction has lost intrinsic physical meanings. Feature selection avoids this problem and only chooses prominent features without correlation and redundancy such as Laplacian score (LS). 3 There are mainly three types of feature selection methods, including wrappers, filters, and embedded methods, and some feature selection methods could treat the multiclass case directly rather than decomposing it into several two-class problems. 43 Hence, in this article, multinomial logistic model with group-lasso (MLMGL) 44 is introduced for investigation of bearing fault diagnosis. Compared with the above classifiers, the advantage of the proposed method is that it could perform multiclass classification with an embedded approach for feature selection in one step.
The rest of this article is organized as follows: section “Theoretical background” briefly introduces ALIF, MPE, and the MLMGL. The procedure of the proposed method based on them is presented in section “The proposed method.” Verification of the proposed method is performed with experiment data sets in section “Experimental verification,” and the conclusions are drawn in section “Conclusion.”
Theoretical background
ALIF
An intrinsic mode function (IMF) 6 should satisfy two properties: the number of extrema and the number of zero crossings must either equal or differ at most by one; considering an upper envelope connecting all the local maxima and a lower envelope connecting all the local minima of the function, their mean must be zero at any point. The EMD process of the non-stationary signal comprises an inner loop and an outer loop. The inner loop is used to extract IMF components, while the outer loop is used to determine the number of IMF components and the residual.
Since EMD algorithm computes the upper and the lower envelope functions through cubic spline interpolation, it will be susceptible to singularities such as plenty of peaks caused by high-frequency noise. Iterative filtering could effectively overcome the disturbance of the noise on the decomposed results through constructing filtering functions and performing convolution operation to take place of the envelop function. Iterative filtering adopts the same algorithm framework as the EMD, but to compute the moving average of the signal x(t) by the convolution 17
where * denotes the convolution operator,

where

Finally, if r(t) satisfies the stop criteria defined above, then set it as the final residual signal and terminate the iterative process. However, the calculation limitation in equation (3) is difficult to achieve because it is impossible to assign n as an infinite number. Instead, equation (4) is adopted as a stop criterion for iterations

where
The ALIF method is derived from the iterative filtering technique, but ALIF could adaptively compute the filter length, and equation (1) can be rewritten as
where
The other modification is that the ALIF filter can be adaptively adjusted with the FP equation. The low-pass filter function is specified in the inner-loop of the iterative filtering technique, and local distortion of the waveform may be produced for the massive nonlinear and non-stationary signals. Whereas, the FP filters are infinitely differentiable and vanish to zero smoothly at both ends, which could guarantee that artificial oscillations are not introduced. The pseudo-code of ALIF method is presented as follows.

MPE
PE was proposed by Bandt and Pompe 29 to detect the dynamic change of the time series data and to overcome former entropy method limitations such as the requirement of long data sets and high computational cost. The definition and calculation steps of PE are described as follows.
Given a time series

where

where

where

The MPE algorithm based on PE comprises two steps:
Given a time series

The PE of each coarse-grained time series is calculated based on equations (6)–(9) and then plotted as the function of the scale factor s, which can be expressed as

Four parameters should be set before using MPE, including the length of the time series N, embedding dimension m, time delay
The normalized MPE with the scale factor s is expressed as

MLMGL
Let
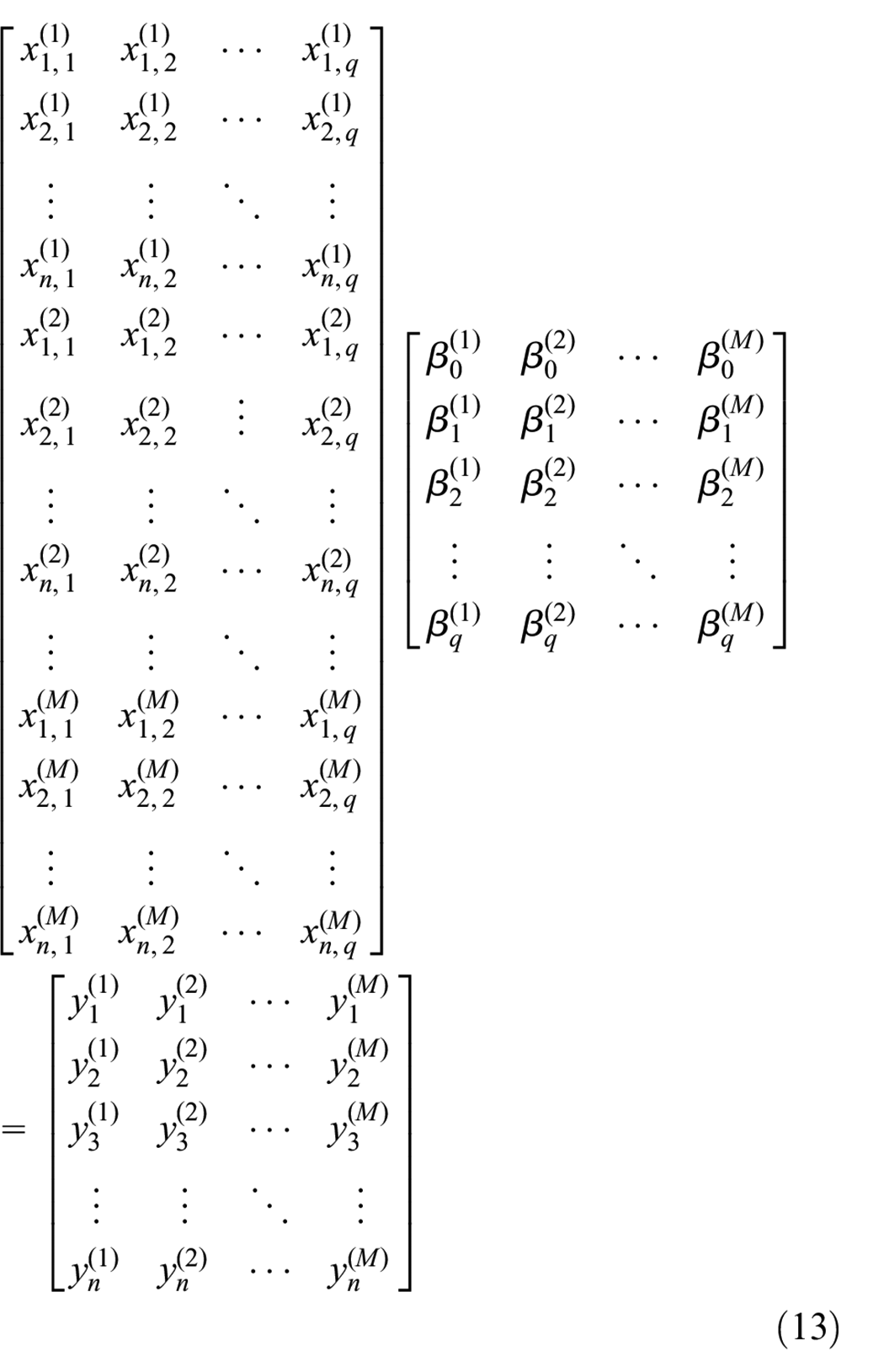
The probability of an observation with covariate vector

Parameters are estimated by minimizing the following formula
where

and
Select the top ranked features based on
The proposed method
The prominent difference between the traditional methods and the proposed method is shown as part A and part B in Figure 1. Since the proposed method could perform multiclass classification with an embedded approach for feature selection in one step, the corresponding procedure based on adaptive local iterative filtering–multiscale permutation entropy (ALIF-MPE) and MLMGL is established for the fault classification of rolling element bearings, and the steps are as follows:
Collect vibration signals of healthy and different types of defective bearings at different external loads.
Apply ALIF to decompose the vibration signals into IMFs. The first m IMFs including the most dominant fault information are chosen to extract features.
Calculate MPE values of the first m IMFs and construct normalized vectors.
Train MLMGL with the normalized feature vectors. After training successfully, MLMGL could be used to test samples to identify the different work conditions and fault patterns.

Illustration of fault classification.
The flowchart of the proposed method is shown in Figure 2.

The flowchart of the proposed approach.
Experimental verification
Experimental setup
To validate the capability of the proposed method, experimental data analysis on rolling bearings with different categories is conducted. The bearing data are obtained from Bearing Data Center of Case Western Reserve University (CWRU), 45 and the bearing experiment system is shown in Figure 3. During the experiments, the drive end bearing 6205-2RS JEM SKF is investigated and defective bearings are seeded with single point faults using electro-discharge machining. Vibration signals are from the accelerometer placed at the 12 o’clock position of the motor drive end with the sampling frequency 12 kHz. In addition, different working conditions are listed in Table 1, including normal, ball fault (BF), inner race fault (IRF), and outer race fault (ORF) (at the 6 o’clock position).

The rolling bearing experiment system.
Working conditions of experiments.
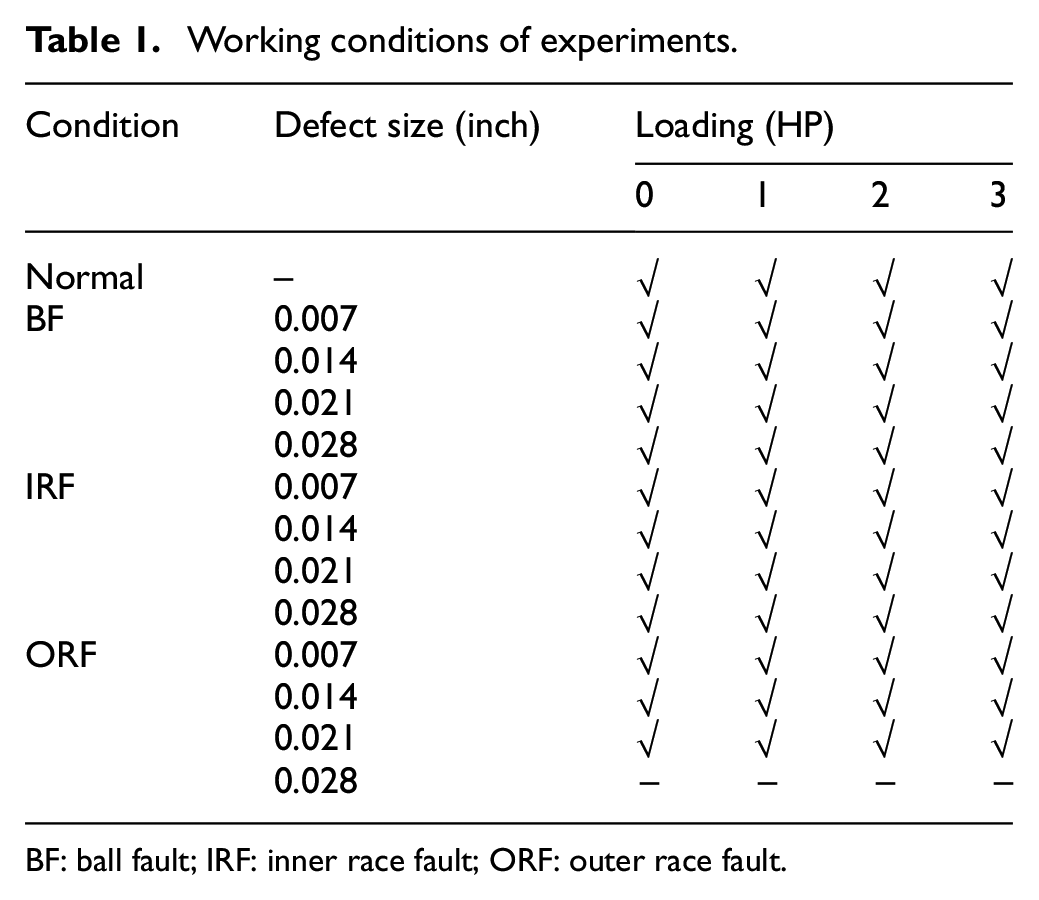
BF: ball fault; IRF: inner race fault; ORF: outer race fault.
Based on the vibration data in Table 1, four groups of tests are designed, including different types of fault (group A), different defective sizes (group B), combination of fault types and defect sizes (group C), and different loads (group D). With the initial purpose for slight fault diagnosis, the defective bearing with defect size 0.007 inch at 0 HP is mostly investigated. The sampling time is 10 s in every conditions, and the total length of the original vibration signals are divided into non-overlapping segments with length N = 2048. Each condition has 50 samples with the specified label of fault type for classification, in which the first 20 samples are selected to train the MLMGL classifier, and the rest 30 samples are for test. The description of bearing fault groups is presented Table 2.
Description of bearing fault groups.

BF: ball fault; IRF: inner race fault; ORF: outer race fault.
Signal decomposition and feature extraction
The time-domain waveforms of rolling bearings with defect size 0.007 inch at 0 HP under four fault categories (Normal, IRF, ORF, and BF) are depicted in Figure 4(a), respectively. Because the dominant fault information always exists in the front IMFs, the first five IMFs with ALIF are utilized and plotted in Figure 4(b). The MPE values are calculated for each IMF, and the results are shown in Figure 5(a)–(e). To verify the necessity of preprocessing with ALIF, MPE values of the original signals are calculated as well in Figure 5(f). It is shown that the four conditions are hard to distinguish effectively by the MPE curves of the original signal; hence, ALIF is needed to enhance the fault characteristics.
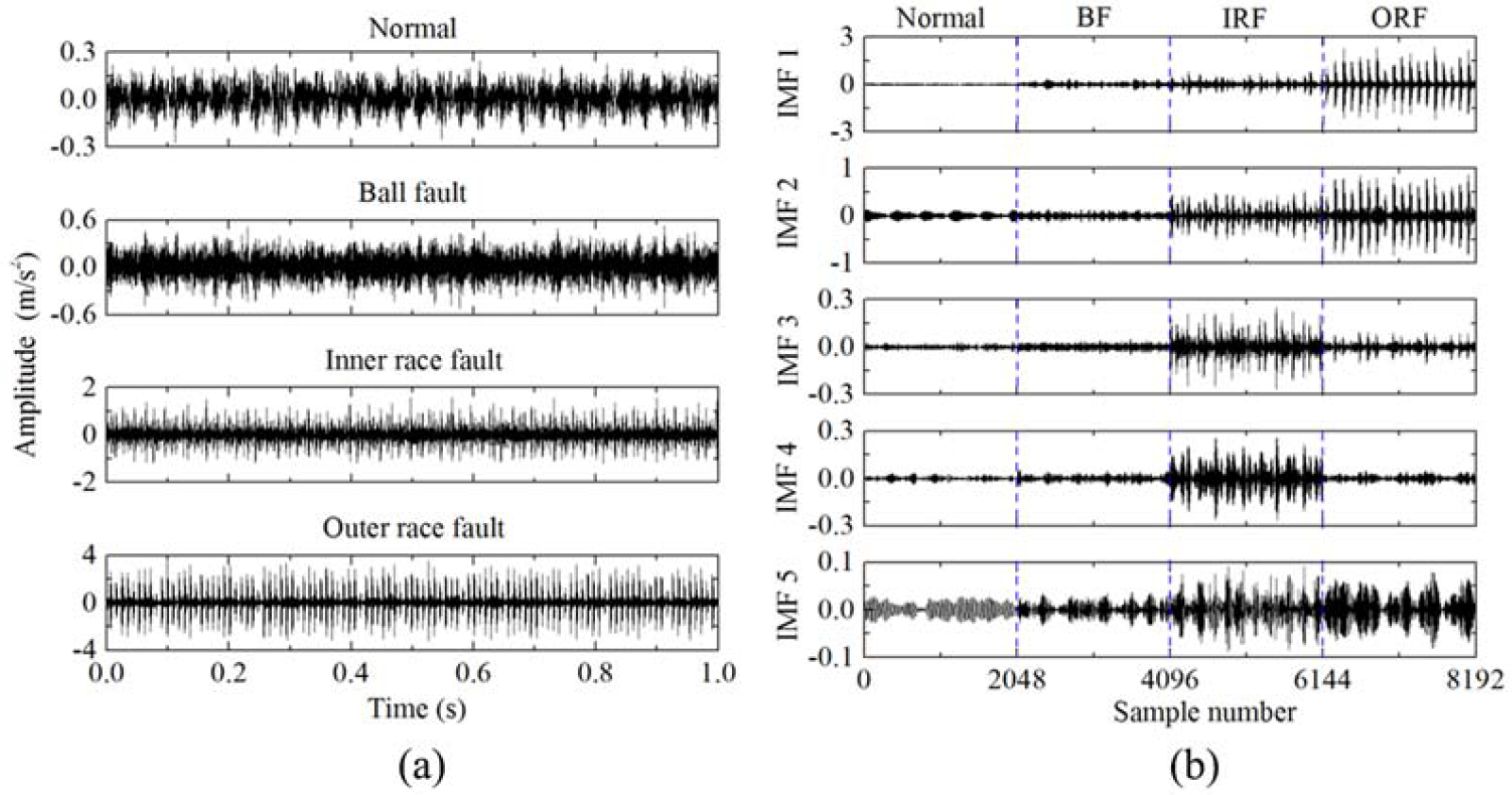
Rolling bearing vibration signals: (a) original waveforms at four different conditions and (b) the first five IMFs obtained by ALIF.

MPE over 20 scales: (a) the first IMF, (b) the second IMF, (c) the third IMF, (d) the fourth IMF, (e) the fifth IMF, and (f) the original signals.
Classification and analysis
As mentioned above, every sample with length of 2048 is adaptively decomposed by ALIF, and only the first five IMFs are employed. The MPE values of every IMF are calculated with the scale factor s = 20, namely, there are 100 features in each sample. After training MLMGL, the prominent features are selected according to the corresponding coefficients. The first three maximum parameters of each condition are listed in Table 3, and variables in the bracket represent the selected features which are relatively concentrated and separated from others as shown in Figure 6(a)–(d). In each group, the prominent features in each condition are different due to the group-lasso penalty, which avoid features with the same positions for classification in the traditional methods. For example, considering the condition of BF with 0.007 inch at 0 HP in the four different groups of Table 3 as shown with bold type, different features are selected for classification. In addition, the parameters are random with a small variance due to the random selection of samples in the cross validation of R package glmnet. Moreover, the most selected features are from the first 60, that is to say, the first three IMFs contain the most fault information, which illustrates the availability of ALIF for feature extraction in some aspects.
Parameter estimation with group-lasso for feature selection.

BF: ball fault; IRF: inner race fault; ORF: outer race fault.

Feature selection with group-lasso from multiple MPE features of bearings: (a) Group A, (b) Group B, (c) Group C, and (d) Group D.
The classification accuracies of the tests by MLMGL are listed in Table 4, with the results shown in Figure 7(a)–(d). A worst-case scenario was observed in group D. The reason may be the particular failure mechanism of the ball fault because faulty rollers do not always contact with the inner race and the outer race. The irregular vibration signals lead to the obscure features. In addition, various kinds of features with the same fault type may cause interferences among them as well. To illustrate the performance of the proposed method for bearing fault type identification, a comparative study between the present work and published works in the literature is presented in Table 5. The works are arranged according to the maximum accuracy, and no work has been published about the application of ALIF in bearing fault diagnosis. Moreover, the entropy-based features, especially MPE, are mostly utilized for fault diagnosis and good results are obtained. Since the binary logistic model is a classifier-like SVM, it is seldom adopted. But, the MLMGL has been proved in this article to be an effective method for identification of multiple faults.
Classification accuracy.


Classification results under different conditions: (a) Group A, (b) Group B, (c) Group C, and (d) Group D.
A comparative study of previous work on bearing fault diagnosis published in the literature.

ORF: outer race fault; IRF: inner race fault; EMD: empirical mode decomposition; ANN: artificial neural network; BF: ball fault; VMD: variational mode decomposition; PSO-KELM: particle swarm optimization-kernel extreme learning machine; LMD: local mean decomposition; MPE: multiscale permutation entropy; HMM: hidden Markov model; WPD: wavelet packet decomposition; HOSA: higher order spectral analysis; PCA: principal component analysis; SVM: support vector machine; IACO-SVM: improved ant colony optimization-support vector machine; LLE: local linear embedding; EEMD: ensemble empirical mode decomposition; PE: permutation entropy; M-RVM: multiclass relevance vector machine; MD: Mahalanobis distance; DWT: discrete wavelet transform; SAX: symbolic aggregate approximation; HTMM: hierarchical transition matrix model; MSE: multiscale entropy; IMFE: improved multiscale fuzzy entropy; LS: Laplacian score; SVM-BT: support vector machine-binary tree; LCD: local characteristic-scale decomposition; ACROA-SVM: artificial chemical reaction optimization algorithm-support vector machine; GHMM: generalized hidden Markov model; SVR: support vector regression; ANFIS: adaptive neuro-fuzzy inference system; ICD-SVM: inter-cluster distance-support vector machine; HHT: Hilbert–Huang transform; WMSC: window marginal spectrum clustering; VPMCD: variable predictive model-based class discrimination; ACC: ambiguity correlation classification; STFT: short-time Fourier transform; CorC: correlation coefficients.
Conclusion
This article presents a novel bearing fault diagnosis method based on ALIF-MPE and MLMGL. ALIF could adaptively decompose the vibration signals with nonlinear and non-stationary characteristics into a sum of IMFs. MPE values of the first five IMFs in different scales are more distinct than that of the original signals. Multinomial logistic model could accurately identify faulty types of rolling bearings due to the advantage of performing multiclass classification with an embedded approach for feature selection in one step. Furthermore, the selected features based on group-lasso penalty are independent, which make the features more distinct for classification. Eventually, the proposed method is evaluated with the practical rolling bearing data from CWRU and comparative studies. The results demonstrate that the proposed method is feasible and effective in bearing fault diagnosis.
Footnotes
Handling Editor: Davood Younesian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 51505100).